 夜雨聆风
夜雨聆风





ROS软件开发,智能小车与无人机仿真
!!ROS机器人,ROS智能小车,深度相机激光雷达,视觉小车,小车机械臂抓取,智能小车自动驾驶等。
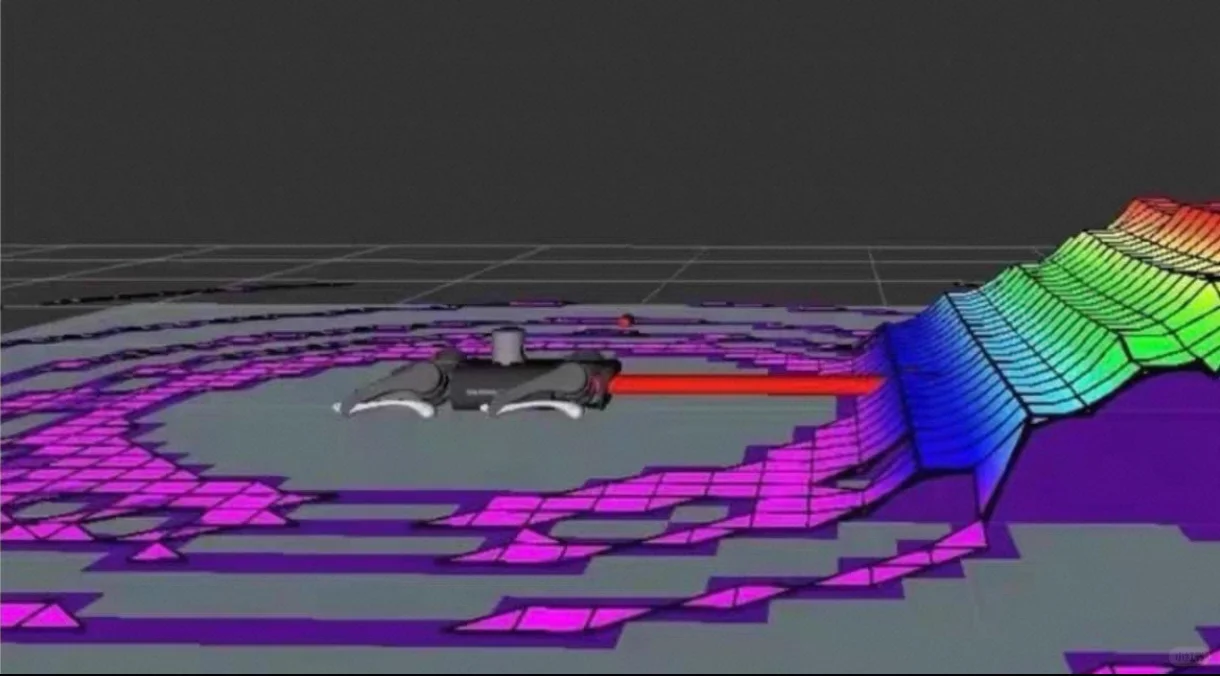
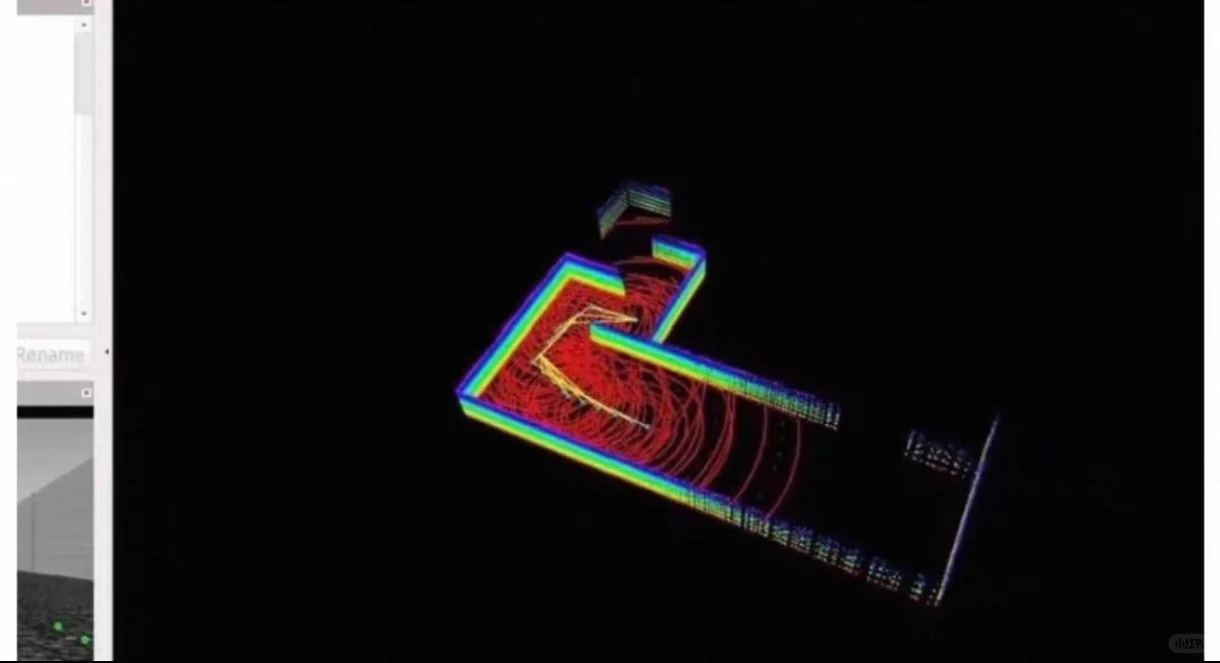
ROS机器人项目,Gazebo仿真,RVIZ可视化,机器人路径规划,激光雷达SLAM建图。
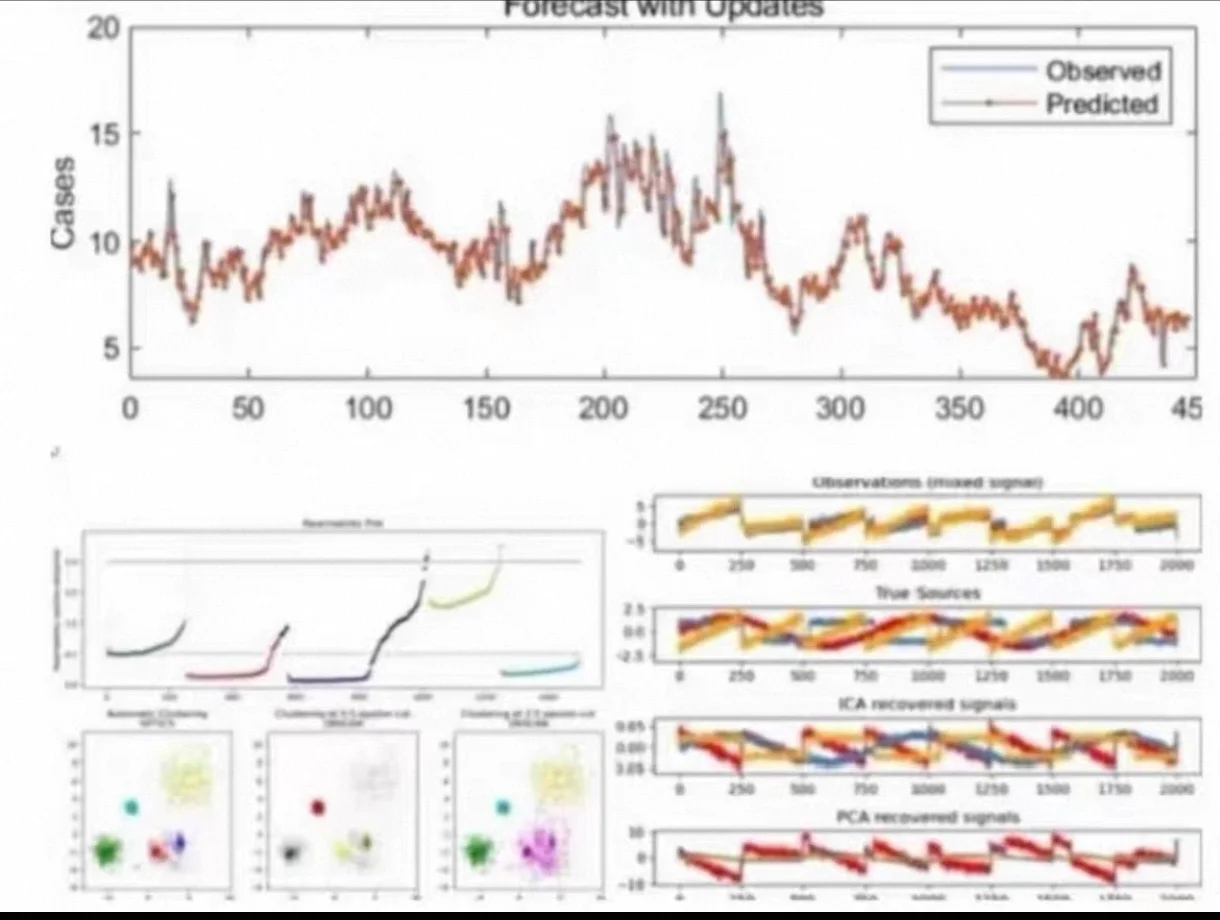
激光雷达slam ROS理论与实践 机器人状态估计 三维点云 视觉vio 多传感器融合 机器人路径规划
可以另外设计功能
固定翼飞行器、复合翼飞行器(包含quadplane,tailsitter和tiltrotor)与其他无人系统(如无人车、无人船与机械臂)。在XTDrone上验证过的算法,可以方便地部署到真实无人机上。
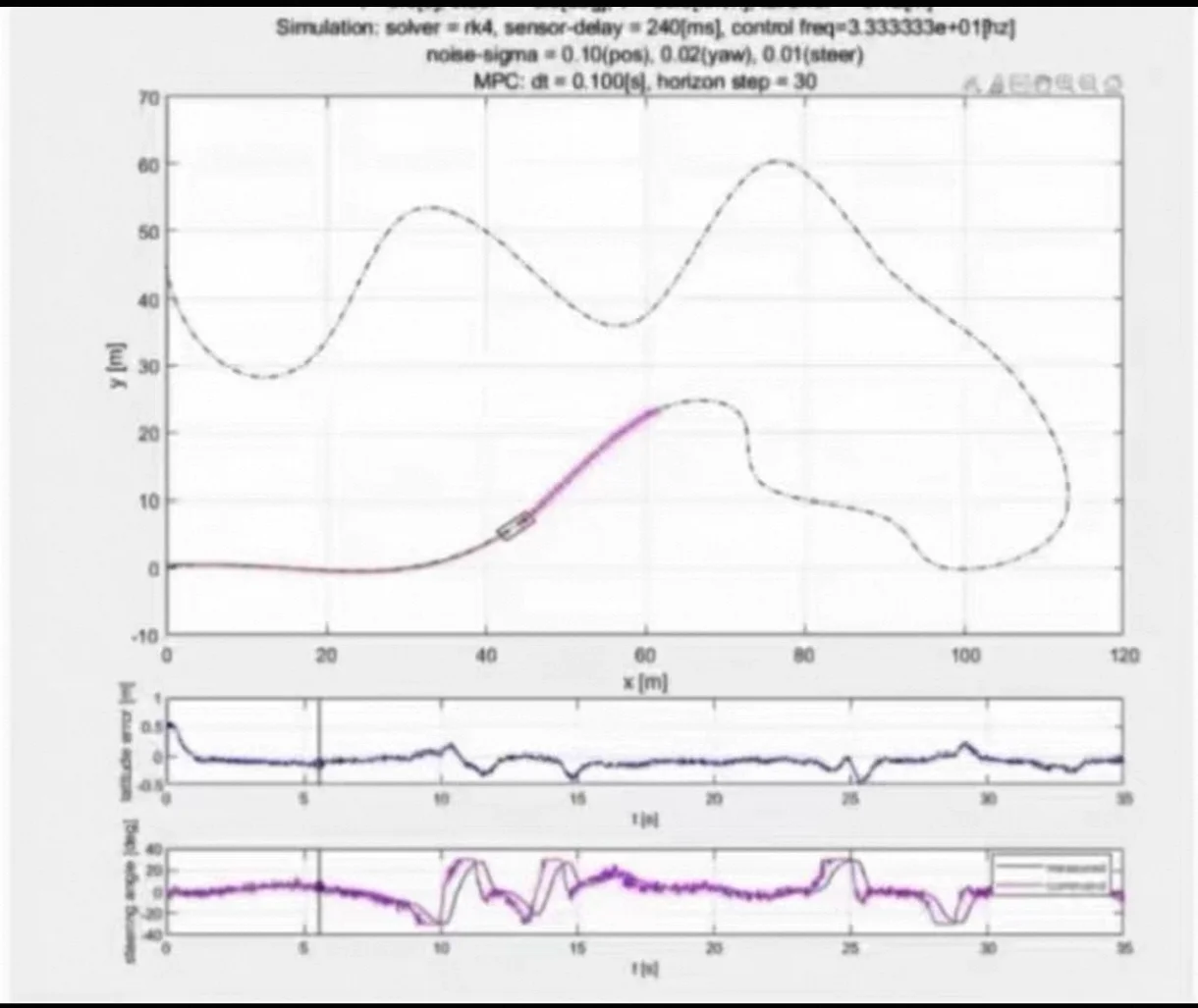
ROS与Gazebo的无人机通用仿真平台。无人机开发matlab仿真,支持多旋翼飞行器(包含四轴和六轴)、Ros无人机仿真,具有Slam导航、定位、路径规划、自主避障等功能。
ROS,Gazebo,PX4无人机仿真环境
Ubuntu18.04,实现圆轨迹、8轨迹飞行
无人机、无人车路径规划,避障,无人机集群飞行
本人在做,欢迎大家来咨询!
