夜雨聆风
夜雨聆风





BMS底层软件开发的详细技术清单,涵盖芯片选型、RTOS配置和功能安全合规要点.
BMS底层软件开发详细技术清单
一、 芯片选型技术要点
1. 主控芯片选型
– 核心参数:32位ARM Cortex-M系列(M4/M7/M33)为主流,需满足ISO 26262 ASIL-C/D功能安全等级,集成ADC(12位及以上,支持差分输入)、CAN FD/LIN通信控制器、PWM模块、DMA控制器。
– 外设集成:需包含电池电压采集通道(≥16路,支持高压隔离)、温度采集通道(≥8路,兼容NTC/PTC)、电流采样接口(支持分流器/霍尔传感器)、高压互锁(HVIL)检测接口。
– 安全机制:内置硬件看门狗、内存保护单元(MPU)、ECC校验、故障诊断模块,支持硬件级别的过压/欠压/过流保护触发。
– 工业级特性:工作温度范围-40℃~125℃,满足汽车级AEC-Q100 Grade 2/1认证,抗电磁干扰(EMC)符合ISO 11452/10605标准。
2. 辅助芯片选型
– 电池采集芯片:选择专用AFE(模拟前端)芯片,支持多节串联电池(如16/32/64串),集成均衡功能,通信接口兼容SPI/I2C,满足高压隔离要求。
– 隔离芯片:通信隔离(CAN/LIN)采用数字隔离器,电源隔离采用隔离式DC-DC模块,隔离电压≥2500Vrms。
– 驱动芯片:继电器驱动芯片需支持过流/短路保护,兼容高低边驱动,响应时间≤100μs。
二、 RTOS配置技术要点
1. RTOS选型要求
– 功能安全认证:需通过ISO 26262 ASIL-D认证,提供安全手册(Safety Manual)和符合性证明,支持故障检测与容错机制。
– 实时性指标:任务切换时间≤10μs,中断响应时间≤5μs,支持抢占式调度,满足BMS实时控制需求(如均衡控制、故障诊断)。
– 主流选型:AUTOSAR OS(符合AUTOSAR Classic Platform标准)、FreeRTOS(需进行功能安全裁剪与认证)、RTX、ThreadX。
2. 核心配置项
– 任务管理
– 任务划分:按功能模块拆分(电压采集任务、温度采集任务、SOC/SOH计算任务、通信任务、故障诊断任务、均衡控制任务)。
– 优先级配置:故障诊断任务(最高优先级)>均衡控制任务>数据采集任务>SOC计算任务>通信任务(最低优先级),避免优先级反转。
– 任务栈大小:根据任务复杂度配置,预留20%~30%冗余,启用栈溢出检测功能。
– 时钟与定时器配置
– 系统时钟:配置主频≥100MHz,外设时钟独立分频,保证ADC采样精度和通信速率。
– 硬件定时器:用于高精度数据采集(周期≤10ms)、均衡控制(周期≤100ms)、故障监控超时判断(如HVIL检测超时≤500ms)。
– 通信栈配置
– CAN FD配置:波特率(数据段2Mbit/s,仲裁段500kbit/s),启用总线错误管理,支持AUTOSAR COM协议栈。
– 内存管理:采用分区式内存管理(Memory Partition),划分安全相关内存区域与非安全区域,启用内存访问权限保护。
– 中断配置
– 中断源:配置ADC采样完成中断、CAN接收中断、故障检测中断(如过压/过流),设置中断优先级高于普通任务。
– 中断服务函数(ISR):简化ISR逻辑,仅做数据缓存和事件触发,复杂处理放入后台任务。
三、 功能安全合规要点(ISO 26262)
1. 安全需求与分析
– 危害分析与风险评估(HARA):识别BMS相关危害事件(如过充导致热失控、过放导致电池损坏),确定ASIL等级,推导安全目标(SG)和功能安全需求(FSR)。
– 技术安全需求(TSR):将FSR分解为底层软件需求,如故障诊断覆盖率≥99%、故障响应时间≤100ms、安全机制的单点故障度量(SPFM)≥90%、潜在故障度量(LFM)≥60%。
2. 开发流程合规
– 需求管理:建立需求追溯矩阵,确保底层软件需求可追溯到TSR,支持需求变更管理与影响分析。
– 设计合规:采用模块化设计,遵循信息安全与功能安全隔离原则,安全相关功能(如故障处理)与非安全功能(如数据记录)物理隔离。
– 编码规范:遵循MISRA C:2012标准,禁用非安全函数(如malloc/free),避免使用全局变量,启用编译器的代码检查功能。
3. 安全机制实现
– 故障诊断机制
– 硬件故障诊断:主控芯片内部自检(ADC校准、通信回路检测、时钟监控)、AFE芯片故障诊断、传感器断线/短路检测。
– 软件故障诊断:任务超时监控、栈溢出检测、CRC校验(数据存储区/通信数据)、变量范围检查、冗余计算比较(SOC算法双路计算)。
– 故障响应机制
– 故障分级:按严重程度分为轻微故障(告警)、中度故障(限制功率)、严重故障(切断高压)。
– 安全降级策略:严重故障时触发主负继电器断开,关闭充电/放电回路,记录故障码(DTC)并上报整车控制器。
– 冗余设计
– 关键数据冗余:SOC/SOH结果、故障状态采用双备份存储(RAM+Flash)。
– 通信冗余:CAN总线故障时,支持LIN总线作为备用通信通道(可选)。
4. 验证与确认
– 单元测试:对底层驱动(ADC、CAN、GPIO)、任务逻辑、故障诊断模块进行单元测试,覆盖率≥90%(语句覆盖)、≥80%(分支覆盖)。
– 集成测试:验证RTOS任务调度、软硬件交互、通信协议兼容性,模拟故障场景(如传感器断线、电池过压)测试故障响应正确性。
– 功能安全评估:邀请第三方机构进行ASIL等级符合性评估,生成功能安全报告(FSC),归档所有开发文档(需求文档、设计文档、测试报告)。
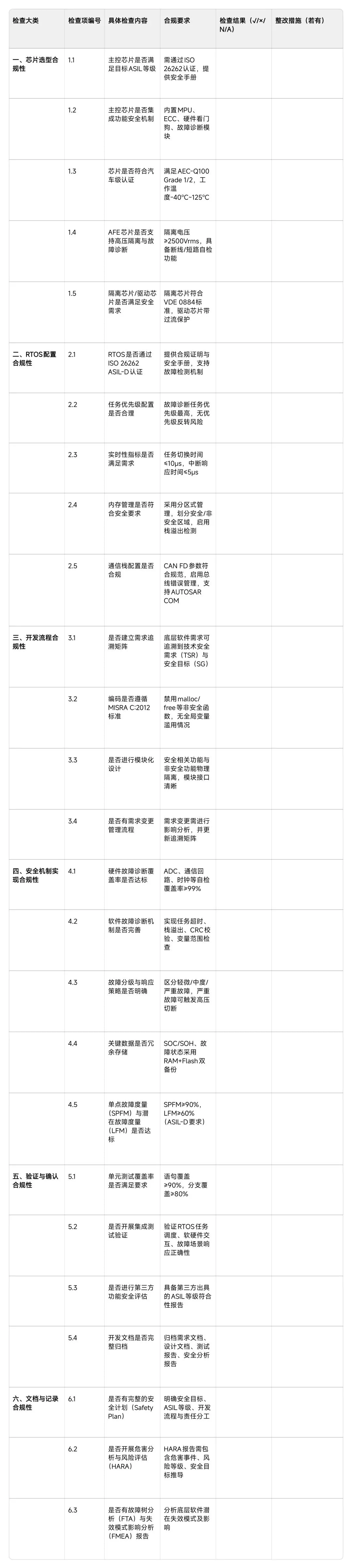
BMS底层软件开发功能安全合规检查表(ISO 26262)
适用阶段:底层软件设计、开发、测试全流程
目标ASIL等级:□ASIL-B □ASIL-C ☑ASIL-D (可按需勾选)
检查人员:__________
检查日期:__________