超越AMP与ADD?PDF-HR:复现宇树G1丝滑空翻!解决Sim2Real重定向中的不可行姿态问题
📄论文标题:PDF-HR: Pose Distance Fields for Humanoid Robots
🔗项目主页:https://gaoyukang33.github.io/PDF-HR/
📅发布时间: 2026年2月

🎯核心亮点
在缺乏大规模高质量运动数据的背景下,如何让Humanoid像人类一样自然运动?港科大(广州)与澳门大学的研究团队提出了一种即插即用的位姿距离场(PDF-HR),在宇树G1上实现了从RL训练加速到运动重定向的全面提升。🤖🕺!
在现有的Sim-to-Real流程中,直接将人类运动映射到机器人本体往往会引入关节超限、自碰撞或接触浮空等运动学不可行的问题 。为了解决这一痛点,来自香港科技大学(广州)和澳门大学的研究团队提出了一种名为PDF-HR (Pose Distance Fields for Humanoid Robots) 的解决方案 。这是一项关于“先验”的创新工作,不同于以往基于GAN或VAE的生成式模型,PDF-HR构建了一个连续、可微的流形距离场,能够定量评估机器人当前姿态的合理性,并为优化控制提供明确的梯度指引 。
🧠什么是PDF-HR?
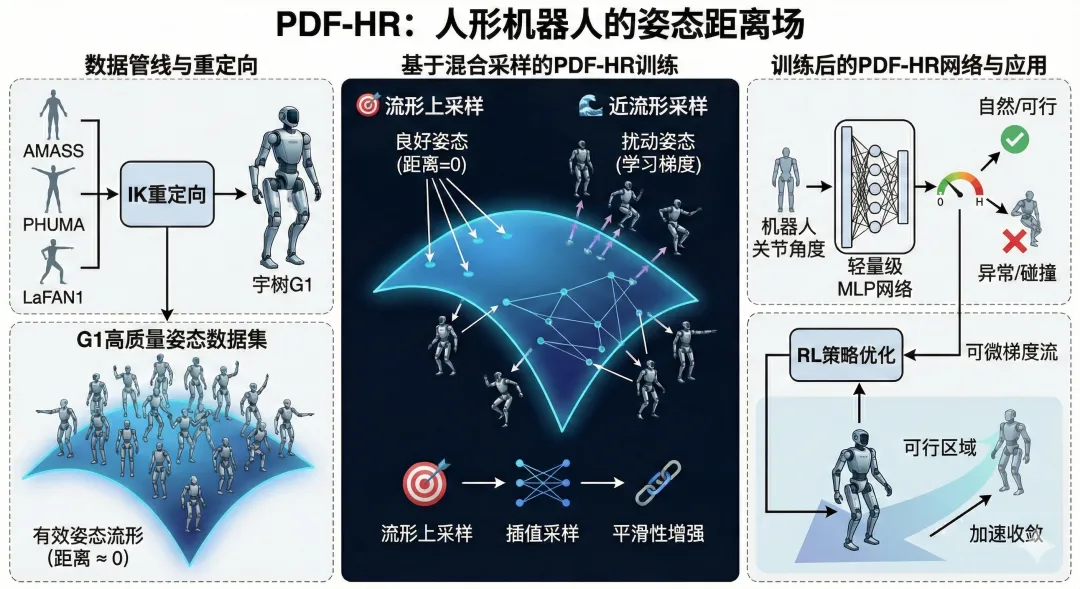
PDF-HR的核心思想非常直观:构建一个函数,输入机器人的关节角度,输出该姿态距离“合理运动流形”的测地线距离。
如果输出接近0,说明当前姿态非常自然、符合物理限制;如果输出值很大,说明该姿态处于异常状态(如关节扭曲、自碰撞等)。
为了训练这个距离场,作者构建了一个基于宇树G1机器人的大规模重定向数据集。通过融合PHUMA、LaFAN1和AMASS等数据集,利用IK(逆运动学)将人类动作重定向到G1本体上,并经过筛选得到高质量的“正样本” 。
在训练过程中,团队采用了混合采样策略:
-
🎯流形上采样: 直接使用数据集中的高质量姿态(距离为0)。
-
🌊近流形采样: 在合理姿态附近施加扰动,学习流形附近的梯度场 。
最终得到的PDF-HR是一个轻量级的MLP网络,它不仅能判断姿态的好坏,更重要的是它是可微的。这意味着在优化控制或强化学习中,我们可以直接计算姿态相对于合理流形的梯度,从而引导策略快速收敛到可行域内 。
🎯工程价值
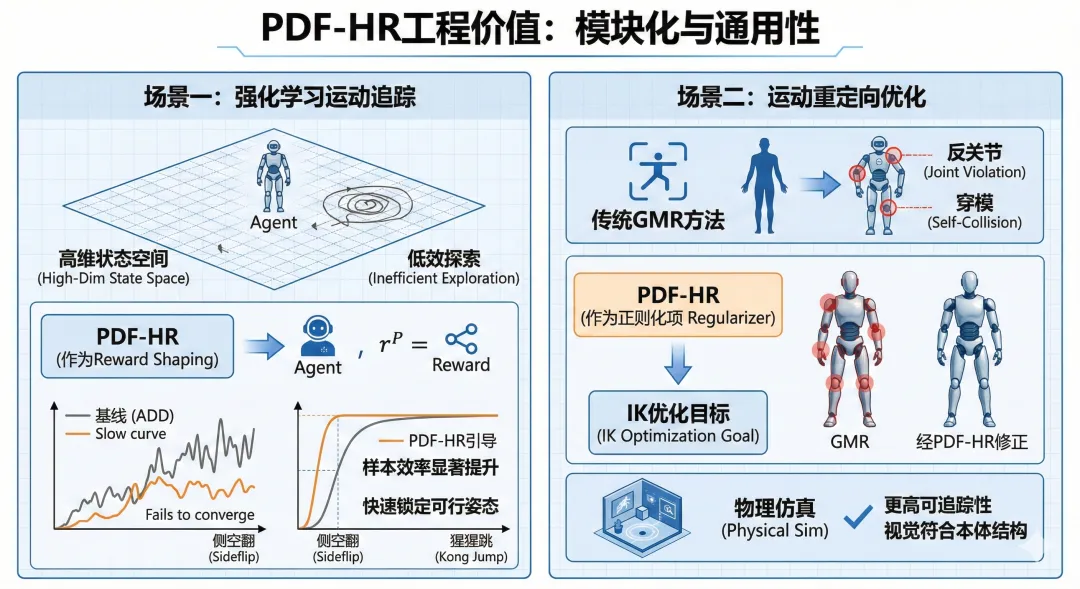
PDF-HR最大的工程价值在于其模块化和通用性。它不需要重新训练底层的控制策略,而是作为一个附加项,灵活应用于多种任务中。
在基于RL的Motion Tracking任务中,探索通常是效率最低的环节。由于人形机器人的高维状态空间,Agent很容易在无效的姿态空间中“打转”。
PDF-HR在这里充当了Reward Shaping的角色。作者引入了一个位姿先验奖励,当Agent的动作偏离合理流形时给予惩罚 。
实验数据显示,引入PDF-HR后,训练样本效率得到了显著提升 。
-
在侧空翻这种高动态任务中,基线方法(ADD)需要消耗大量的样本探索,甚至难以收敛;而PDF-HR引导的策略能够快速锁定可行姿态,训练速度大幅领先 。
-
在猩猩跳等跑酷任务中,PDF-HR同样表现出了极强的鲁棒性 。
传统的运动重定向方法(如GMR)通常基于几何约束求解IK。但在缺乏物理先验的情况下,GMR容易产生违反物理规律的姿态(例如反关节或穿模),导致后续的Sim-to-Real难以部署 。
将PDF-HR作为一个正则化项加入到IK优化目标中,可以显著修正这些伪影。实验对比显示,经PDF-HR修正后的重定向运动,不仅在视觉上更符合机器人本体结构,在物理仿真中的可追踪性也更高 。
📉实验数据与局限性
为了验证算法的有效性,作者在Unitree G1机器人上进行了广泛的测试,包括单轨迹追踪、风格化模仿以及通用运动追踪。
当然,作者也坦诚地指出了当前方法的不足。首先,虽然PDF-HR加速了收敛,但在某些极高精度的追踪任务中,最终的追踪误差略高于纯粹的强约束方法 。其次,在风格化生成任务中,PDF-HR偶尔会出现模式坍塌的问题,即生成的动作多样性不足 。最后,由于引入了神经网络推理,其运行速度相比于纯几何IK会稍慢,需要通过批处理优化来缓解 。
 夜雨聆风
夜雨聆风