 夜雨聆风
夜雨聆风





NanoBot源代码详解-5:定时任务、消息总线及心跳机制
定时任务
核心的文件结构
nanobot/├── cron/│ ├── __init__.py # 公共接口导出│ ├── types.py # 类型定义(数据模型)│ └── service.py # 调度服务实现├── agent/tools/cron.py # AI代理工具集成└── cli/commands.py # 命令行接口(部分)types.py中定义了五个数据模型
-
CronSchedule: 定义任务的调度规则。 -
CronPayload: 定义任务触发时要执行的内容。 -
CronJobState:定义任务的状态 -
CronJob: 表示一个完整的定时任务。 -
CronStore:任务内容持久化,保存到磁盘。
CronService 是整个模块的大脑,负责管理任务生命周期和调度执行。
nanobot自己实现了定时任务,并没有使用系统自带的定时任务系统。
任务的持久化就是将相关信息保存到本地的JSON文件中。 所以在 nanobot/cli/commands.py 中,cron_app 定义了 add, list, remove, enable, run 等命令。这些命令实例化 CronService,直接操作底层的 JSON 存储文件,无需启动后台服务即可修改配置。
Cron 任务在等待时, 唤醒机制完全依赖于 Python asyncio 事件循环(Event Loop)的 内部定时器 。 CronService计算出距离下一个任务还需要多久(例如delay_s秒),然后创建一个内部任务tick(),在CronService类中,
def _arm_timer(self) -> None:"""Schedule the next timer tick.""" ... async def tick(): await asyncio.sleep(delay_s) ...在时间流逝了delay_s后,事件循环检测到定时器到期,恢复tick()任务的执行。代码从 await 之后继续运行,调用 _on_timer() 执行任务。
消息总线
数据模型 (Data Models)
/nanobot/bus/events.py中定义了两种标准化的消息类
-
InboundMessage (入站消息) : 接收来源于各个 Channel(如 Telegram, WhatsApp)产生的消息,如果是通知消息,channel就是system。 -
OutboundMessage (出站消息) :由 AgentLoop 产生,发送到Channel通道
消息总线 (Message Bus)
/nanobot/bus/queue.py中实现MessageBus类,这个类是整个系统的通信中枢,基于Python的asyncio.Queue 实现。
class MessageBus:def __init__(self):# 双向消息队列self.inbound: asyncio.Queue[InboundMessage] # 入站消息队列self.outbound: asyncio.Queue[OutboundMessage] # 出站消息队列# 出站消息订阅者(按渠道分组)self._outbound_subscribers: dict[str, list[Callable]] = {}self._running = False在初始化时就就在内部创建了两个独立的异步队列:
-
inbound : Channel -> Agent (外部消息流入) -
outbound : Agent -> Channel (AI 回复流出)
核心方法
|
|
|
|
|---|---|---|
publish_inbound(msg) |
|
Channel._handle_message() |
consume_inbound() |
|
AgentLoop.run() |
publish_outbound(msg) |
|
AgentLoop, CronService |
consume_outbound() |
|
ChannelManager._dispatch_outbound() |
subscribe_outbound(channel, callback) |
|
|
dispatch_outbound() |
|
|
inbound_size
outbound_size |
|
|
上面dispatch_outbound- 是一个后台运行的 Task。它不断从 outbound 队列取出消息。它查找 _outbound_subscribers 字典,找到订阅了该 channel 的所有回调函数,并执行它们。
while self._running: msg = await asyncio.wait_for(self.outbound.get(), timeout=1.0) subscribers = self._outbound_subscribers.get(msg.channel, [])for callback in subscribers: await callback(msg)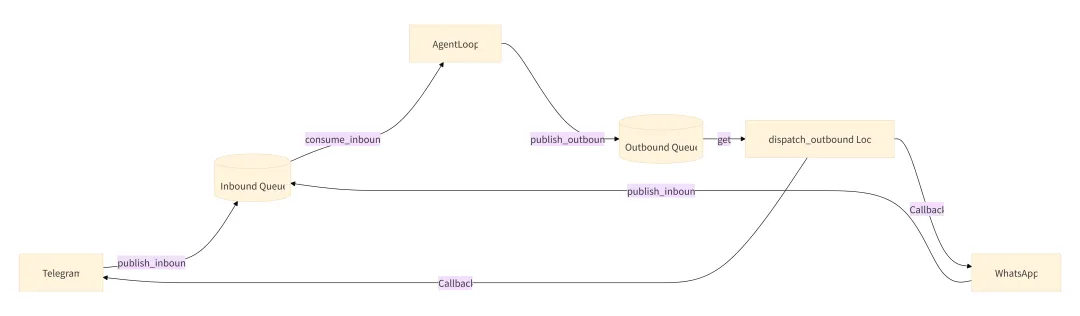
心跳机制
在nanobot/heartbeat目录下,nanobot项目提供了一个心跳机制。
不过这个心跳机制和我们平时理解的从中保活功能不一样。它其实是一个定期唤醒代理的主动式服务,用于检查和处理预定义的任务。它通过读取工作区中的 HEARTBEAT.md 文件,让代理定期执行其中列出的任务,实现自我管理和自动化工作流程。
默认情况下,它每隔30分钟,发送一个提示词给AI Agent,让它检查一下HEARTBEAT.md文件里是否有要执行的任务。
# Default interval: 30 minutesDEFAULT_HEARTBEAT_INTERVAL_S = 30 * 60# The prompt sent to agent during heartbeatHEARTBEAT_PROMPT = """Read HEARTBEAT.md in your workspace (if it exists).Follow any instructions or tasks listed there.If nothing needs attention, reply with just: HEARTBEAT_OK"""# Token that indicates "nothing to do"HEARTBEAT_OK_TOKEN = "HEARTBEAT_OK"它会先检查文件中是否包含可执行的内容,如果有,则将内容发送给Agent,让它执行,如果没有则直接返回一个ok就行了。
看起来和定时任务的功能相同。但是与定时任务的区别在于使用场景不同。
|
|
|
|
|---|---|---|
| 触发源 | 文件内容
HEARTBEAT.md) |
时间规则
|
| 执行内容 | 不确定
|
确定
|
| 持久化 |
|
cron.json) |
| 交互性 | 人机异步协作 | 机器自动化 |
| 成本控制 | 高
|
低
|
| 代码位置 | nanobot/heartbeat/ |
nanobot/cron/ |
因为触发源是文件,所以在运行的任何时候,你都可以修改这个文件,临时增加要执行的内容到HEARTBEAT.md文件中。
心跳机制相当于AI“每隔一段时间看看有没有新指示”,而任务则是AI “每隔一段时间必须做某件具体的事”。
当然,你一定要用cron代替heartbeat,也是可以是,毕竟,这里的心跳不是传统意义上的心跳。你可以在cron里加上一个任务,这个任务就是把上面那段提示词提交给agentloop。但是缺点是有两个:
一是浪费token,本来用heartbeat的话,如果文件里没有新指示,你本可以不调用AI。
二是如果任务非常多,或者任务特别费时,如果运行时间超过30分钟,但cron时间一到又调用文件,重复执行,反而造成混乱。
但是用心跳机制则不用担心这个问题,因为任务执行时,
if self._running: await self._tick()它会停在 await self._tick() 这一行, 计时器暂停 。 只有在任务结束后再继续计时30分钟。
结语
看代码的部分,暂时告一段落。看代码是为了更好地理解它是怎么运作的,而了解运作机制的目的还是更好地应用。
总结一下,可以把它分成四个模块
1. 网关gateway
它是所有交互的入口。你可以从命令行,也可以从telegram、whatapp、飞书或其他聊天工具(需要自己开发接口)发消息,网关都会把这些不同平台的消息格式统一起来,然后交给后面的系统处理。核心就是AgentLoop,它常驻后台,负责身份验证、会话管理,还内置了定时任务调度。某种程度上,它就是整个系统的中枢。
2. 大模型LLM管理器
系统自己不是AI,它只这里提供接口,连到别人的大模型上。它做的事情其实是根据不同的情况,动态地生成提示词,把用户指令、可用技能、相关记忆和当前状态整合在一起发给模型。之所以说它是管理器,因为它其实是不仅仅是一个转发者,同时还是一个调度和决策者。
3. 记忆系统
用文件来保存记忆,会话日志用 JSONL 一行一条记录,方便查询。而且还有每日记忆和长期记忆,用来保存对用户的总结。再加上一个 SOUL.md,可以Agent的人格和设定。这样随着交互的增加,Agent的知识和个性会越来越明确。
4. 技能系统
这相当于Nanobot的手脚。SKILL.md文件里保存了技能,但在文件中技能只是告诉大模型在什么情况下调用哪个工具,以及参数怎么填。也就是说,技能是给模型看的使用说明书,工具则是实际干活的可执行代码。比如Python脚本。
这就是一个把AI从在线顾问变成一个可服务于人类的机器人的第一步啊。
