夜雨聆风
夜雨聆风





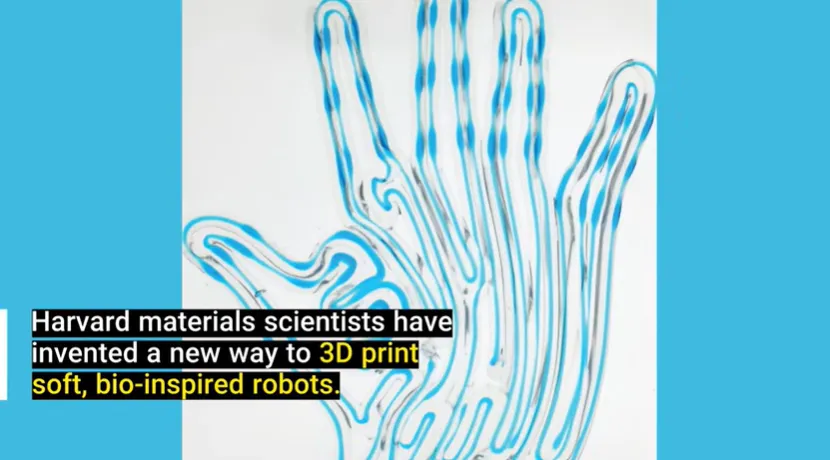
3D打印雷哥说 | 哈佛利用多材料3D打印构建可编程软体机器人

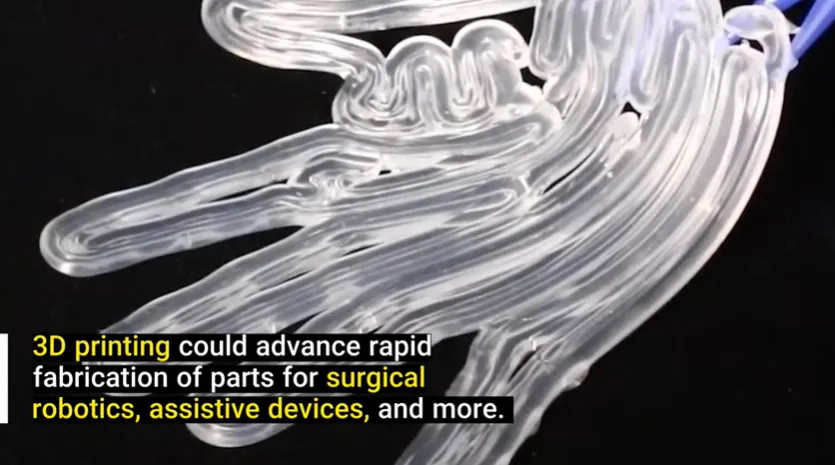
该研究发表于《Advanced Materials》。该方法利用增材制造技术创建基于丝材的组件,并在内部精确构建通道结构,当通入空气加压时,这些通道可实现可控弯曲和变形。相比传统制造方式,这种方法无需后期组装步骤,能够实现更快速的原型开发、更高的设计自由度以及按需定制。该技术有望加速自适应系统的发展,包括手术机器人、可穿戴辅助技术以及柔性工业自动化设备等领域。
这项研究由哈佛工程与应用科学学院(SEAS)Jennifer Lewis实验室的研究生 Jackson Wilt 和前博士后 Natalie Larson 完成,并获得美国国家科学基金会(NSF)以及美国陆军研究办公室多学科大学研究计划(ARO MURI)的资助。
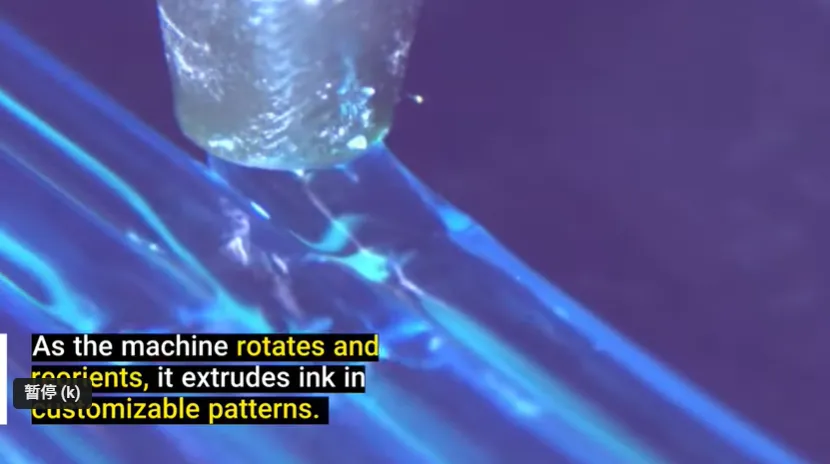
旋转式多材料3D打印方法
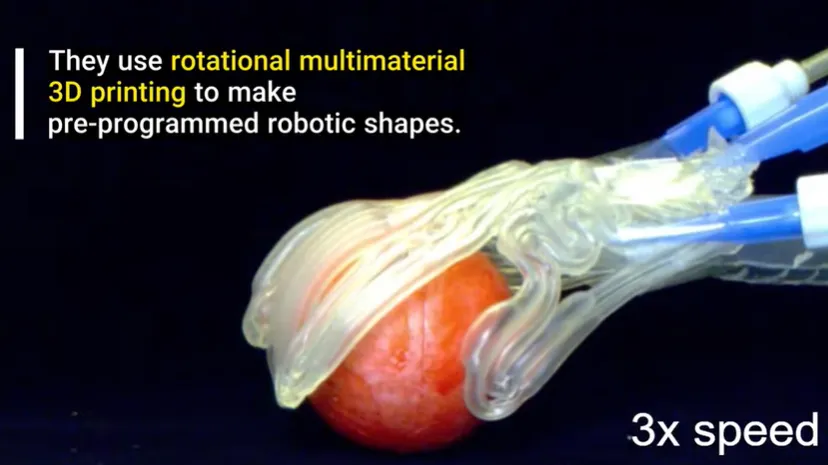
该制造方法建立在 Lewis 实验室此前开发的“旋转式多材料3D打印”技术之上。这项技术采用单一喷嘴同时沉积多种材料。在打印过程中,系统通过旋转和调整方向,实现材料在不同结构中的可定制沉积。该团队此前曾利用这一策略制造出螺旋状软结构,可作为人工肌肉及其他自适应组件。
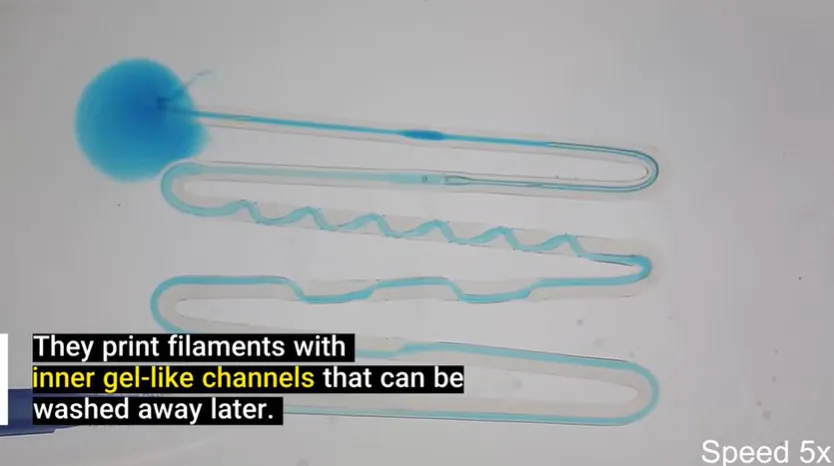
在本研究中,团队制造了由聚氨酯外层与内部通道结构组成的丝材,内部通道由一种常用于发胶的聚氧乙烯-聚氧丙烯嵌段共聚物(poloxamer)形成。这些丝材可以排列成线性结构,也可以构建为平面或立体图案。通过调整喷嘴几何形状、旋转速度以及材料流速等参数,研究人员能够高精度控制内部通道的尺寸、方向和几何形态。
Wilt 表示:“我们通过一个出口同时使用两种材料,并通过旋转来编程机器人在充气时的弯曲方向。我们的目标是开发适用于多种应用的软体仿生机器人。”
当外层材料固化后,通过清洗工艺去除 poloxamer 核心材料,从而留下内部中空的管状结构。这些通道在加压后可以实现定向弯曲,使装置能够伸展、收缩或抓取物体。
无模具的简化制造流程
该技术为制造机械结构复杂的软体机器人系统提供了一种更为简化的路径。传统制造通常需要对弹性体材料进行模塑,将气动通道嵌入表面,然后再覆盖并密封一层材料。这个过程耗时且难以个性化定制。
Wilt 表示:“在这项研究中,我们不需要模具。我们直接打印结构,快速进行编程,并且能够迅速定制驱动方式。”
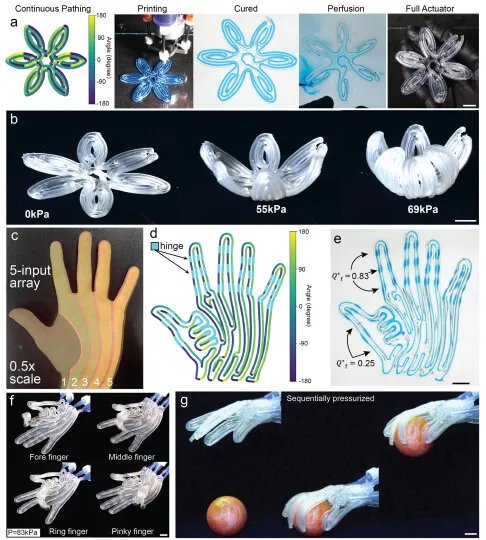
为展示该方法的多样性,研究团队采用连续的迷宫式路径螺旋打印出类似花朵的结构。他们还制作了一个具有五指结构的手柄,每个“手指”带有关节结构,类似指关节,可实现可控弯曲。Wilt 指出,这一成果表明这种快速制造技术在手术机器人和人体辅助技术等领域具有广泛应用潜力。
局限性与技术挑战
尽管该多材料3D打印方法前景广阔,但在实现大规模应用之前仍面临若干技术和实践挑战。
材料性能仍是关键问题。软体机器人组件需要在柔韧性、耐久性、抗疲劳性能以及在反复加压循环下的长期机械稳定性之间取得平衡。
此外,将该技术扩展到更大尺寸设备或实现高通量制造时,也可能带来打印一致性、内部通道可靠性以及质量控制方面的复杂问题。
与许多新兴增材制造技术一样,未来仍需进一步验证其可重复性、优化材料组合,并建立标准化测试与认证体系,特别是在手术机器人等安全关键型应用中尤为重要。
多材料3D打印推动可编程软体机器人发展
长期以来,软体机器人受到制造技术限制:传统模具与多步骤组装方式减缓了设计迭代速度,也使精确、可预测的运动控制变得困难。
增材制造通过直接从数字设计构建零件,消除了组装瓶颈,缩短了交付周期,并允许在打印过程中嵌入气动通道等功能结构,从而实现具有可靠、可编程运动能力的软体机器人,适用于手术机器人和可穿戴辅助设备等应用。
多材料3D打印进一步拓展了这一能力。通过在单次打印中结合软性弹性体与较硬聚合物,设计师可以突破单材料打印或传统浇注工艺的限制,在无需额外组装的情况下嵌入驱动路径、梯度刚度结构及其他功能特征。
近期案例已展现多材料3D打印的实际影响。例如,哈佛的 MM3D 方法打印出具有多材料和嵌入式通道的软体机器人,制造出类似折纸结构的行走装置,其承载能力可达到自身重量的数倍。此外,科罗拉多大学博尔德分校的研究人员开发了 OpenVCAD 工具,用于更智能的多材料3D设计。
这些实例表明,多材料增材制造已成为生产可编程软体机器人系统的实用方法,并正在加速该领域的发展。
我是许方雷,设计专业,博士,英国皇家艺术学会会士,专注工业设计、增材制造和商业模型。在这里,我将用我的专业知识和经验,带你深入了解3D打印世界,分享最新行业动态,解读前沿技术,探讨商业应用。







为3D打印及人工智能从业者及时整合中美及全球的行业洞察、技术趋势、应用场景、竞争策略和深度动态,提供高价值信息。我们对3D打印充满热情,也欢迎来自全球各地的撰稿人。英文网站3DPTimes同步上线,专注3D打印领域,产出大量高质量的前沿资讯与技术内容。