夜雨聆风
夜雨聆风





libev库源码分析系列教程(一)
源码分析mettle后门工具学习 所使用的依赖库
官网:http://securitytech.cc
libev 系统架构设计全景图
1. 整体架构概览
1.1 分层架构设计
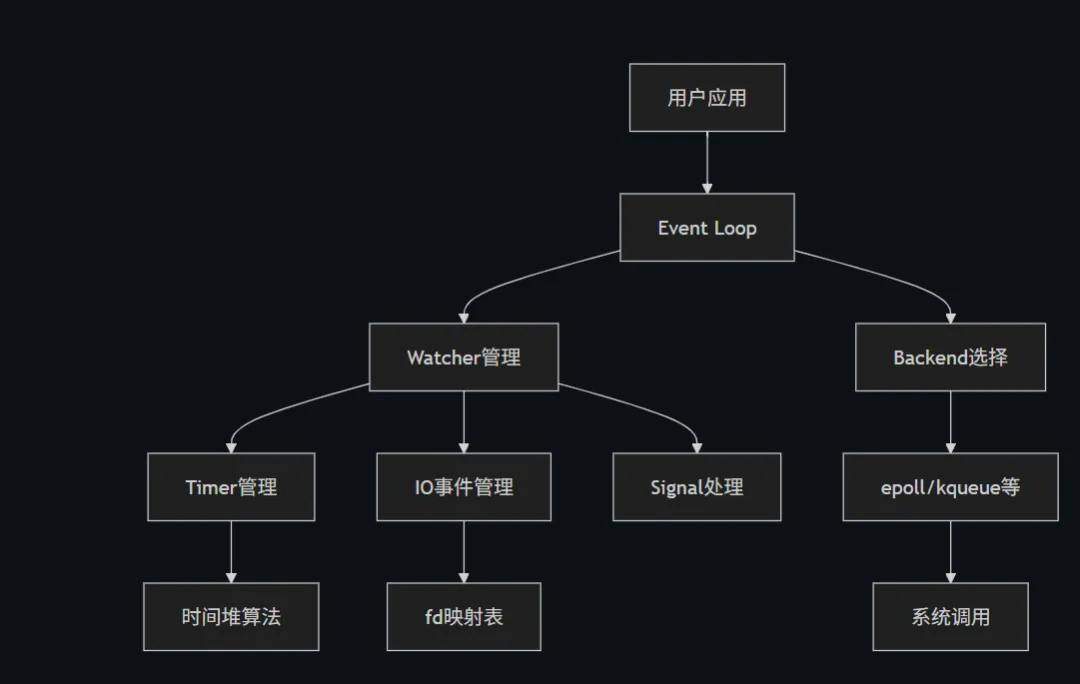
┌─────────────────────────────────────────┐│ Application Layer │ ← 用户应用程序├─────────────────────────────────────────┤│ C/C++ API Layer │ ← ev.h, ev++.h├─────────────────────────────────────────┤│ Event Loop Core Layer │ ← ev.c 核心逻辑├─────────────────────────────────────────┤│ Backend Abstraction Layer │ ← 多种后端适配├─────────────────────────────────────────┤│ Platform Interface Layer │ ← 系统调用封装└─────────────────────────────────────────┘1.2 核心组件交互图
2. 模块详细设计
2.1 Event Loop模块
2.1.1 状态机设计
INITIALIZED → RUNNING → STOPPING → TERMINATED ↓ ↓ ↓ ↓ 配置完成 处理事件 清理资源 循环结束2.1.2 生命周期管理
// 创建阶段structev_loop*loop=ev_loop_new(EVFLAG_AUTO);// 运行阶段 ev_run(loop, 0);// 销毁阶段ev_loop_destroy(loop);
2.2 Watcher管理模块
2.2.1 对象生命周期
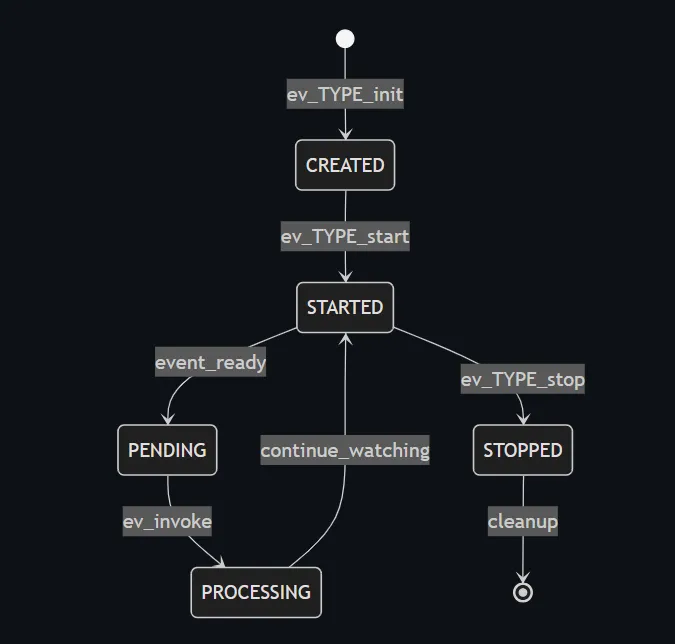
CREATE(init) → START(register) → ACTIVE(process) → STOP(unregister) → DESTROY(cleanup)2.2.2 状态转换图
2.3 Backend适配模块
2.3.1 插件式架构
// Backend接口定义structev_backend_ops { int (*init)(EV_P_intflags); void (*destroy)(EV_P); void (*poll)(EV_P_ev_tstamptimeout); int (*check)(EV_P); };// 具体实现注册staticstructev_backend_opsepoll_backend= { .init=epoll_init, .destroy=epoll_destroy, .poll=epoll_poll, .check=epoll_check};
2.3.2 运行时后端选择
// 智能后端选择算法staticintbackend_choose(void) { // 优先级排序: epoll > kqueue > port > poll > selectif (ev_use_epoll()) returnBACKEND_EPOLL; if (ev_use_kqueue()) returnBACKEND_KQUEUE; if (ev_use_port()) returnBACKEND_PORT; if (ev_use_poll()) returnBACKEND_POLL; returnBACKEND_SELECT; }
3. 数据流设计
3.1 事件处理流水线
事件产生 → 系统通知 → Backend收集 → Loop分发 → Watcher回调 → 用户处理 ↑ ↓ └───────────────────── 重新注册 ←─────────────────────┘3.2 内存数据流向

4. 性能架构设计
4.1 零拷贝优化
// 事件数据传递采用引用而非复制staticvoidfd_event_nocheck(EV_P_intfd, intrevents) { // 直接传递watcher指针,避免数据复制for (w=anfds[fd].head; w; w=w->next) { if (w->events&revents) { ev_feed_event(EV_A_ (ev_watcher*)w, w->events&revents); } } }
4.2 批量处理机制
// 批量处理pending事件减少函数调用开销staticvoidev_invoke_pending(EV_P) { pendingpri=NUMPRI; while (pendingpri) { --pendingpri; while (pendings[pendingpri]) { // 批量处理同一优先级的所有事件ANPENDING*p=pendings[pendingpri]; // ... 处理逻辑 } } }
4.3 缓存优化策略
// 时间缓存减少系统调用VAR(ev_tstamp, now_floor, , , 0.) // 缓存当前时间VAR(ev_tstamp, timeout_block, , , 0.) // 缓存超时计算结果// 内存局部性优化VAR(ev_watcher_time*, timerv, [TIMERS], , 0) // 连续内存存储VAR(ev_watcher*, pending, [NUMPRI], , 0) // 优先级分组存储
5. 并发与同步设计
5.1 单线程假设
// 线程局部存储设计structev_loop { // 所有字段都是线程私有的intbackend_fd; // 每个loop独立的backendev_tstampnow; // 线程本地时间缓存intactivecnt; // 线程本地活跃计数// ... 其他字段};
5.2 跨线程通信机制
// ev_async实现线程安全唤醒typedefstruct { EV_WATCHER(ev_async) sig_atomic_tsent; // 原子操作标志intfd; // 通信管道fd} ev_async;// 使用pipe/eventfd实现跨线程通知staticvoidasync_send(EV_P_ev_async*w) { if (!w->sent) { w->sent=1; write(w->fd, "", 1); // 触发事件循环 } }
6. 错误处理与恢复机制
6.1 多层次验证体系
// 编译时验证#ifEV_VERIFY>2# defineEV_FREQUENT_CHECK ev_verify(EV_A)#else# defineEV_FREQUENT_CHECK do { } while (0)#endif// 运行时验证staticvoidev_verify(EV_P) { // 数据结构完整性检查assert(("libev: loop not initialized", ev_is_active(&pipe_w))); assert(("libev: active index mismatch", ev_active(w) ==expected_index)); // ... 更多验证}
6.2 优雅降级机制
// Backend故障转移staticvoidbackend_fallback(EV_P) { // 当前backend失效时的处理if (backend_fd<0) { // 尝试下一个可用backendswitch (current_backend) { caseBACKEND_EPOLL: current_backend=BACKEND_KQUEUE; break; caseBACKEND_KQUEUE: current_backend=BACKEND_POLL; break; // ... 其他降级路径 } } }
7. 内存管理架构
7.1 分层内存管理
┌─────────────────────────────────────┐│ Application Memory │ ← 用户分配├─────────────────────────────────────┤│ Watcher Object Pool │ ← 预分配对象池├─────────────────────────────────────┤│ Backend Internal Buffers │ ← 系统调用缓冲区├─────────────────────────────────────┤│ Loop Control Structures │ ← 核心控制结构└─────────────────────────────────────┘7.2 内存回收策略
// 惰性回收机制staticvoidmemory_cleanup(EV_P) { // 定期清理不再使用的内存if (++cleanup_counter>CLEANUP_THRESHOLD) { cleanup_counter=0; // 回收空闲的fd_change数组// 压缩pending队列// 释放未使用的backend资源 } }
8. 可扩展性设计
8.1 插件化Watcher扩展
// 新类型Watcher注册机制typedefstruct { constchar*name; size_tsize; void (*init)(EV_P_ev_watcher*w); void (*start)(EV_P_ev_watcher*w); void (*stop)(EV_P_ev_watcher*w); } ev_watcher_type;// 动态注册新类型intev_register_watcher_type(ev_watcher_type*type) { // 添加到类型注册表// 初始化相关数据结构return0; }
8.2 自定义Backend支持
// Backend插件接口typedefstruct { constchar*name; int (*probe)(void); // 可用性探测int (*init)(EV_P_intflags); // 初始化void (*destroy)(EV_P); // 销毁void (*poll)(EV_P_ev_tstamptimeout); // 事件轮询int (*ctl)(EV_P_intop, ev_watcher*w); // 控制操作} ev_backend_plugin;// 注册自定义backendintev_register_backend(ev_backend_plugin*plugin) { // 添加到backend候选列表// 设置优先级return0; }
9. 监控与调试架构
9.1 性能监控体系
// 性能统计收集#ifEV_STATSVAR(unsigned long, invoke_calls, , , 0) // 回调调用次数VAR(unsigned long, loop_count, , , 0) // 循环迭代次数VAR(ev_tstamp, loop_time, , , 0.) // 总运行时间VAR(ev_tstamp, timeout_block, , , 0.) // 阻塞时间#endif// 实时性能查询APIev_tstampev_loop_time(EV_P) { returnloop_time; }unsigned longev_loop_invoke_count(EV_P) { returninvoke_calls; }
9.2 调试诊断工具
// 调试信息输出typedefstruct { FILE*log_file; intlog_level; unsigned longflags; } ev_debug_config;// 调试钩子系统typedefstruct { void (*loop_enter)(EV_P); void (*loop_leave)(EV_P); void (*watcher_start)(EV_P_ev_watcher*w); void (*watcher_stop)(EV_P_ev_watcher*w); void (*event_dispatch)(EV_P_ev_watcher*w, intrevents); } ev_debug_hooks;
10. 部署与运维架构
10.1 配置管理系统
// 运行时配置typedefstruct { unsigned intflags; // 运行标志intbackend; // 指定backendev_tstamptimeout_max; // 最大超时时间intfd_limit; // fd限制size_tmemory_limit; // 内存限制} ev_config;// 环境变量配置支持staticvoidconfig_from_env(ev_config*cfg) { constchar*env; if ((env=getenv("LIBEV_FLAGS"))) cfg->flags=strtoul(env, 0, 0); if ((env=getenv("LIBEV_BACKEND"))) cfg->backend=atoi(env); if ((env=getenv("LIBEV_TIMEOUT_MAX"))) cfg->timeout_max=atof(env); }
10.2 版本兼容性管理
// ABI/API版本管理#defineEV_VERSION_MAJOR 4#defineEV_VERSION_MINOR 33#defineEV_VERSION_PATCH 0// 特性检测宏#ifEV_VERSION_MAJOR >= 4# defineEV_FEATURE_BACKEND_DYNAMIC 1# defineEV_FEATURE_WATCHER_EXTEND 1#endif// 兼容性层#ifEV_COMPAT3// 保持与3.x版本的API兼容#endif
11. 安全架构设计
11.1 内存安全防护
// 边界检查staticinlinevoidsafe_array_access(void*array, size_telement_size, intindex, intmax_elements) { assert(("libev: array index out of bounds", index >= 0&&index<max_elements)); return (char*)array+index*element_size; }// 指针有效性验证staticinlineintvalidate_watcher_pointer(ev_watcher*w) { returnw&& ((uintptr_t)w& (sizeof(void*)-1)) ==0&&// 对齐检查w->active >= 0&&w->active<MAX_ACTIVE_VALUE; // 值域检查}
11.2 资源泄漏防护
// RAII风格资源管理typedefstruct { ev_loop*loop; intowns_loop; // 标记是否需要销毁loop} ev_scope_guard;staticinlineev_scope_guardev_make_scope_guard(ev_loop*loop, intowns_loop) { ev_scope_guardguard= { loop, owns_loop }; returnguard; }staticinlinevoidev_scope_guard_cleanup(ev_scope_guard*guard) { if (guard->owns_loop&&guard->loop) { ev_loop_destroy(guard->loop); guard->loop=NULL; } }
架构版本: v2.0设计原则: 高性能、高可用、易扩展适用场景: 高并发网络服务、实时系统、嵌入式应用
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx