夜雨聆风
夜雨聆风





libev库源码分析系列教程(四)
源码分析mettle后门工具学习 所使用的依赖库
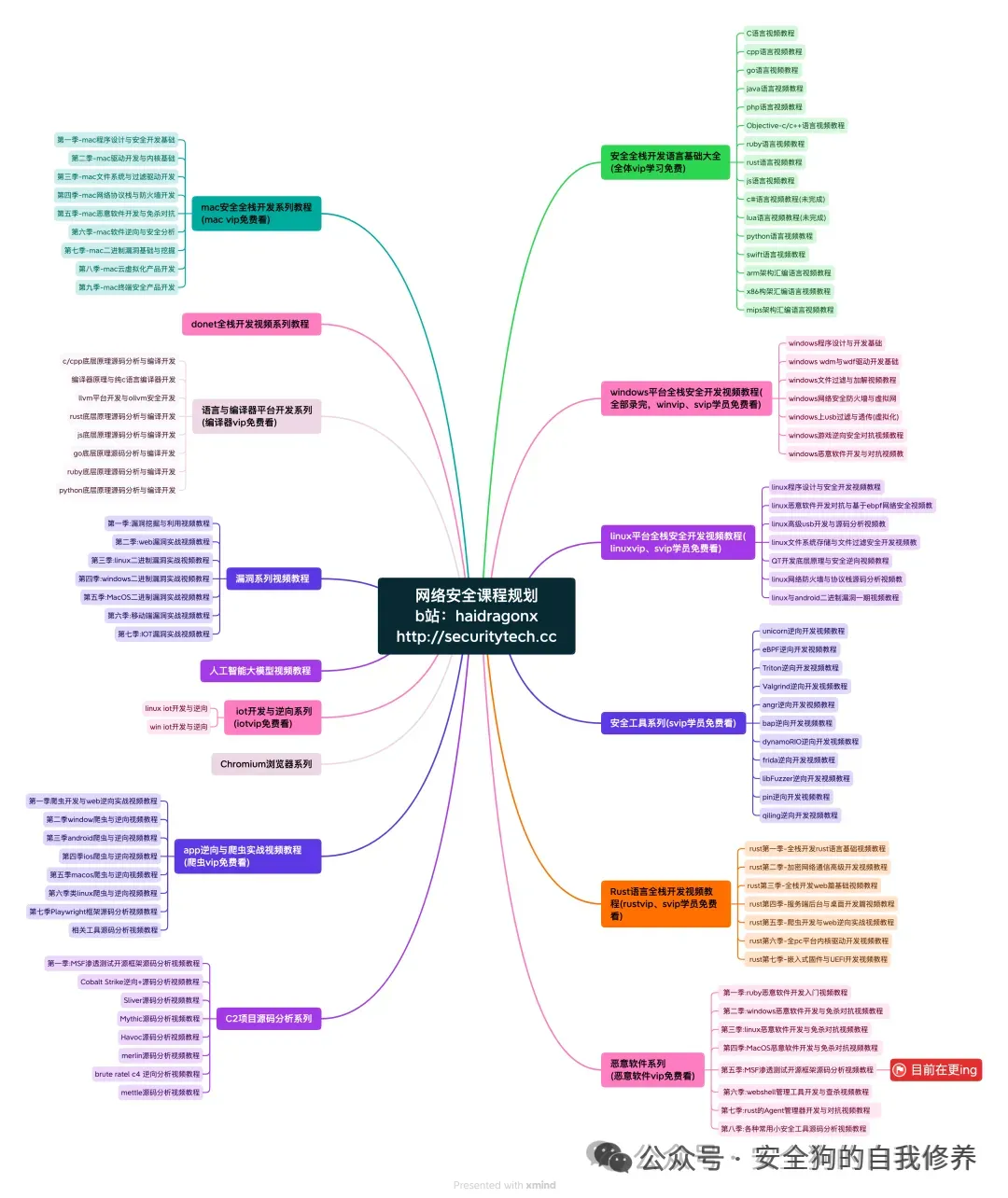
官网:http://securitytech.cc
libev ev_loop结构体深度解析
1. ev_loop结构体概述
1.1 设计理念
ev_loop是libev的核心控制结构,采用了独特的宏定义系统来管理全局变量,这种设计既保证了性能又提供了良好的封装性。
1.2 内存布局特点
// ev_loop本质上是一个包含大量状态变量的结构体// 通过宏定义系统动态生成,避免了传统全局变量的污染structev_loop{ #include "ev_vars.h" // 展开所有变量定义 };
2. 核心字段详解
2.1 Backend相关字段
backend_fd – 后端文件描述符
VAR(int, backend_fd, , , 0)
作用: 存储当前使用的事件后端文件描述符 生命周期:
-
初始化: backend_init()中创建 -
使用: backend_poll()中传入系统调用 -
销毁: backend_destroy()中关闭
平台差异:
// epoll: epoll_create()返回的fd// kqueue: kqueue()返回的fd // select: 通常为-1(不使用单独fd)
backend_modify/ backend_poll – 函数指针
VAR(void (*)(EV_P_intfd, intoev, intnev), backend_modify, , , 0)VAR(void (*)(EV_P_ev_tstamptimeout), backend_poll, , , 0)
作用: 指向当前平台的具体实现函数 动态绑定: 根据运行时检测的结果设置
2.2 时间管理字段
now_floor – 时间缓存
VAR(ev_tstamp, now_floor, , , 0.)
优化原理:
-
减少频繁的系统时间调用 -
在一个事件循环周期内复用相同的时间值 -
提高时间相关计算的性能
timerv/timercnt – 时间堆管理
VAR(ev_watcher_time*, timerv, [TIMERS], , 0) // 时间堆数组VAR(int, timercnt, [TIMERS], , 0) // 各优先级计数
数据结构:
-
使用数组实现的最小堆 -
支持多个优先级队列 -
TIMERS通常定义为5(对应不同优先级)
2.3 Pending事件管理
pending/pendingcnt – 待处理事件队列
VAR(ev_watcher*, pending, [NUMPRI], , 0) // pending队列数组VAR(int, pendingcnt, [NUMPRI], , 0) // 各优先级计数VAR(int, pendingpri, , , 0) // 当前处理优先级
工作机制:
事件就绪 → 加入pending队列 → 按优先级批量处理 → 执行用户回调pendings – pending事件存储
VAR(ANPENDING, pendings, [NUMPRI][PENDING], , 0)
存储结构: 二维数组[优先级][事件索引] 容量管理: PENDING定义为默认大小,可动态增长
2.4 文件描述符管理
anfds – fd到watcher映射表
VAR(ev_watcher_list*, anfds, , , 0)VAR(int, anfdmax, , , 0)
数据结构:
-
动态数组,每个元素是一个watcher链表头 -
实现fd到多个watcher的映射关系 -
支持一个fd同时监听多种事件
fdchanges – fd变更队列
VAR(int, fdchanges, [FD_CHANGES], , 0)VAR(int, fdchangecnt, , , 0)
批处理优化:
-
收集一轮循环中的所有fd变更 -
在合适的时机批量更新backend注册 -
减少系统调用次数
3. 内存管理字段
3.1 循环控制
VAR(int, loop_count, , , 0) // 事件循环迭代次数VAR(int, loop_depth, , , 0) // 嵌套调用深度VAR(int, idleall, , , 0) // idle watcher计数
3.2 状态标志
VAR(int, activecnt, , , 0) // 活跃watcher总数VAR(int, loop_done, , , 0) // 循环结束标志VAR(int, backend, , , 0) // 当前后端类型
4. 性能统计字段
4.1 调试和监控
#ifEV_VERIFYVAR(int, verify_count, , , 0) // 验证计数器#endif#ifEV_STATSVAR(unsigned int, invoke_calls, , , 0) // 回调调用次数VAR(ev_tstamp, timeout_block, , , 0.) // 阻塞时间统计#endif
4.2 内存使用统计
VAR(int, epoll_eventmax, , , 0) // epoll事件数组大小VAR(int, kqueue_changemax, , , 0) // kqueue变更数组大小
5. 平台特定字段
5.1 Unix平台特有
VAR(int, sig_pending, , , 0) // 待处理信号计数VAR(sig_atomic_t, sig_atomic, , , 0) // 原子信号标志VAR(int, pipe_wanted, , , 0) // pipe写入需求
5.2 Windows平台特有
#ifdef_WIN32VAR(SOCKET, backend_fd, , , INVALID_SOCKET) // Windows socket句柄VAR(UINT_PTR, timer_id, , , 0) // 定时器ID#endif
6. 结构体内存布局优化
6.1 缓存行对齐考虑
// 频繁访问的字段放在结构体前面VAR(int, backend_fd, , , 0) // 高频访问VAR(ev_tstamp, now_floor, , , 0.) // 高频访问VAR(int, pendingpri, , , 0) // 循环中频繁使用// 相对静态的字段放在后面VAR(int, loop_count, , , 0) // 递增但不频繁访问VAR(int, verify_count, , , 0) // 调试时才使用
6.2 内存局部性优化
// 相关功能的字段集中存放// 时间管理相关VAR(ev_tstamp, now_floor, , , 0.)VAR(ev_tstamp, timeout_block, , , 0.)VAR(ev_watcher_time*, timerv, [TIMERS], , 0)// pending处理相关 VAR(ev_watcher*, pending, [NUMPRI], , 0)VAR(int, pendingcnt, [NUMPRI], , 0)VAR(int, pendingpri, , , 0)
7. 初始化和销毁过程
7.1 创建过程
structev_loop*ev_loop_new (unsigned intflags) { structev_loop*loop= (structev_loop*)ev_malloc (sizeof (structev_loop)); // 初始化所有字段loop_init (EV_A_flags); // 初始化backendif (!backend_init (EV_A_flags)) { ev_free (loop); return0; } returnloop; }
7.2 销毁过程
voidev_loop_destroy (EV_P) { // 清理所有watcherwhile (activecnt) { ev_watcher*w=active[activecnt-1]; ev_stop (EV_A_w); } // 销毁backendbackend_destroy (EV_A); // 释放内存ev_free (loop); }
8. 多实例支持机制
8.1 EV_P宏的作用
// 单实例模式#defineEV_P struct ev_loop *loop#defineEV_A loop// 多实例模式通过ev_wrap.h实现#defineEV_P struct ev_loop *loop,#defineEV_A loop,// 实际使用ev_run (EV_P_intflags) // 展开为: ev_run (struct ev_loop *loop, int flags)
8.2 线程局部存储
// 每个线程拥有独立的ev_loop实例// 避免了锁竞争,提高了并发性能staticEV_P=EV_DEFAULT; // 线程局部的默认loop
9. 调试和验证机制
9.1 数据结构完整性检查
staticvoidnoinlineecb_coldev_verify (EV_P) { // 检查loop基本状态assert (("libev: loop not initialized", ev_is_active (&pipe_w))); assert (("libev: loop not active", ev_active (&pipe_w) ==1)); // 检查pending队列一致性for (inti=NUMPRI; i--; ) { for (ANPENDING*p=pendings [i]; p; p= (ANPENDING*)((ev_watcher*)p)->next) { assert (("libev: pending watcher not on pending queue", pendings [ABSPRI (p->w)][p->w->pending-1].w==p->w)); } } // 检查fd映射表for (inti=0; i<anfdmax; ++i) { for (ev_watcher_list*w=anfds [i].head; w; w=w->next) { assert (("libev: fd mismatch", ((ev_io*)w)->fd==i)); } } }
9.2 性能监控
// 循环计数统计++loop_count;// 时间统计ev_tstampbegin=ev_time ();backend_poll (EV_A_timeout);timeout_block+=ev_time () -begin;// 回调调用统计++invoke_calls;
10. 最佳实践建议
10.1 内存使用优化
// 合理设置初始大小避免频繁realloc#defineFD_CHANGES 128 // fd变更队列初始大小#definePENDING 64 // pending队列初始大小#defineTIMERS 5 // 时间堆优先级数量
10.2 性能调优参数
// 根据应用场景调整#defineMAX_BLOCKING_INTERVAL 1e6 // 最大阻塞时间#defineMIN_BLOCKING_INTERVAL 1e-6 // 最小阻塞时间#defineCLEANUP_INTERVAL 1000 // 清理间隔
10.3 调试配置
// 开发阶段启用完整验证#defineEV_VERIFY 3#defineEV_STATS 1#defineENABLE_DEBUG 1// 生产环境优化性能#defineEV_VERIFY 0 #defineEV_INLINE 1#defineECB_NDEBUG 1
分析版本: v1.0源码版本: libev 4.33更新时间: 2026年3月1日
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx