夜雨聆风
夜雨聆风





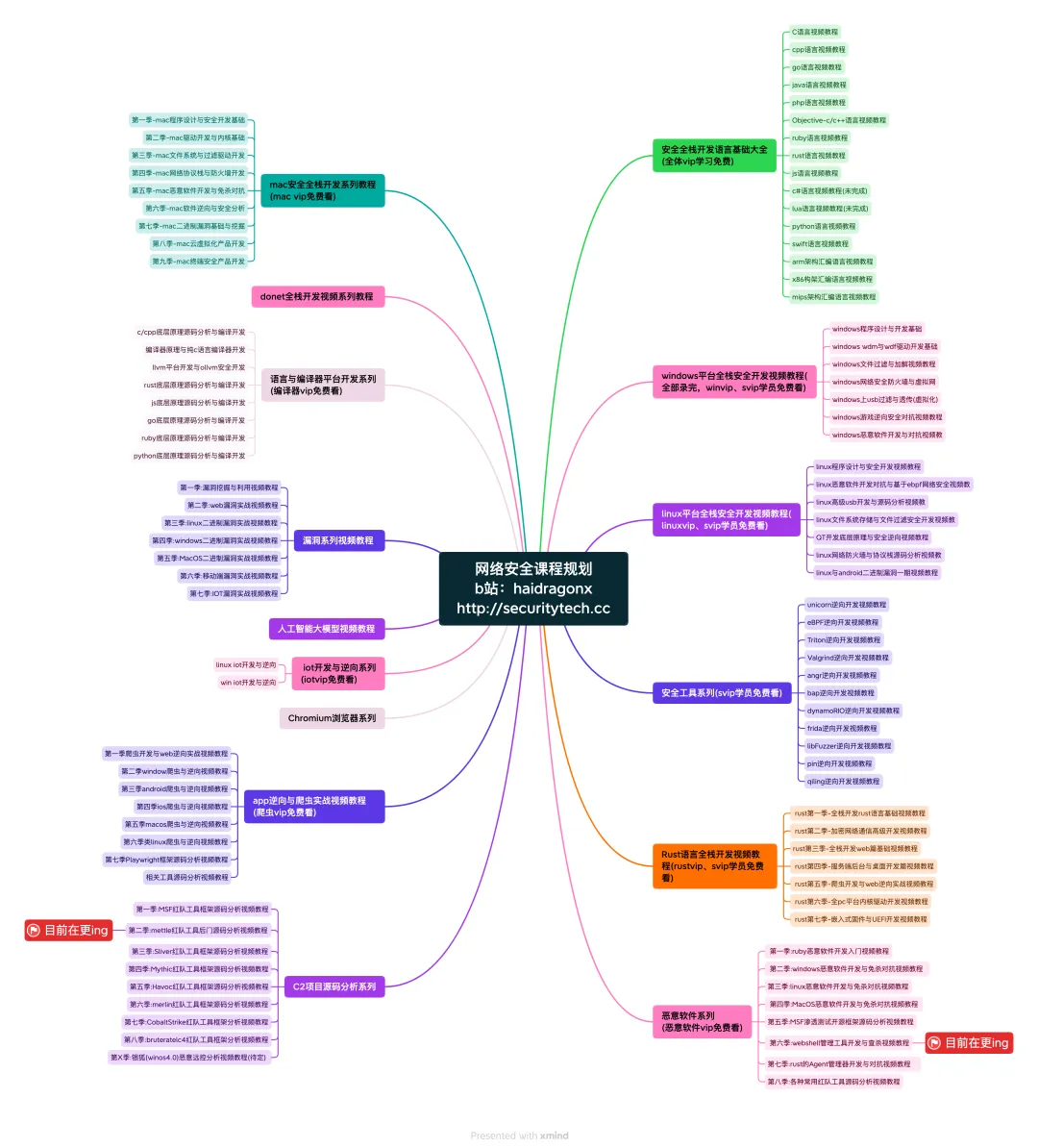
libev库源码分析系列教程(六)
源码分析mettle后门工具学习 所使用的依赖库
官网:http://securitytech.cc
libev IO Watcher实现机制深度解析
1. IO Watcher核心设计
1.1 设计理念
IO Watcher采用观察者模式实现,通过文件描述符(fd)与事件类型(events)的组合来监控各种IO事件,支持边缘触发和水平触发两种模式。
1.2 数据结构定义
/* ev.h - IO Watcher定义 */typedefstruct{ EV_WATCHER(ev_io) intfd; /* 文件描述符 */intevents; /* 监听事件类型(POLLIN|POLLOUT|...) */} ev_io;
2. 核心实现机制
2.1 fd映射表管理
anfds数组结构
/* ev_vars.h - 核心数据结构 */VAR(ev_watcher_list*, anfds, , , 0) /* fd到watcher链表的映射 */VAR(int, anfdmax, , , 0) /* anfds数组当前大小 *//* 链表节点定义 */typedefstructev_watcher_list{ EV_WATCHER_LIST; /* 包含next/prev指针 */} ev_watcher_list;
fd到watcher的映射机制
/* 一个fd可以对应多个watcher *//* anfds[fd]指向该fd的所有watcher链表头 *//* 每个watcher通过events字段区分监听的事件类型 *//* 示例: fd=3同时监听读写事件 */anfds[3] ->ev_io(fd=3,events=POLLIN) ->ev_io(fd=3,events=POLLOUT)
2.2 事件注册与注销
启动过程源码分析
/* ev.c - ev_io_start核心实现 */voidev_io_start (EV_P_ev_io*w) { if (ecb_expect_false (ev_is_active (w))) return; /* 1. 更新fd的事件掩码 */fd_change (EV_A_w->fd, w->events); /* 2. 加入活跃watcher计数 */ev_start (EV_A_ (ev_watcher*)w, 1); /* 3. 添加到fd对应的watcher链表 */array_add (anfds [w->fd].head, (ev_watcher_list*)w); }/* fd_change - fd事件变更处理 */inline_speedvoidfd_change (EV_P_intfd, intflags) { unsigned charold=anfds [fd].events; unsigned charnew=old | flags; if (ecb_expect_false (new!=old)) { anfds [fd].events=new; /* 从旧状态移除 */if (old) fd_kill (EV_A_fd); /* 添加到新状态 */if (new) fd_reify (EV_A_fd); } }
停止过程源码分析
/* ev.c - ev_io_stop核心实现 */voidev_io_stop (EV_P_ev_io*w) { /* 1. 清除pending状态 */clear_pending (EV_A_ (ev_watcher*)w); if (ecb_expect_false (!ev_is_active (w))) return; /* 2. 从fd链表中移除 */array_del (anfds [w->fd].head, (ev_watcher_list*)w); /* 3. 更新fd事件掩码 */fd_change (EV_A_w->fd, 0); /* 4. 减少活跃计数 */ev_stop (EV_A_ (ev_watcher*)w); }
3. Backend适配层实现
3.1 epoll后端实现
epoll_ctl操作封装
/* ev_epoll.c - epoll后端核心实现 */staticvoidepoll_modify (EV_P_intfd, intoev, intnev) { structepoll_eventev; ev.events=0; /* 转换libev事件类型到epoll事件类型 */if (nev&EV_READ) ev.events |= EPOLLIN; if (nev&EV_WRITE) ev.events |= EPOLLOUT; ev.data.fd=fd; if (!oev) /* 新增 */epoll_ctl (backend_fd, EPOLL_CTL_ADD, fd, &ev); elseif (!nev) /* 删除 */epoll_ctl (backend_fd, EPOLL_CTL_DEL, fd, 0); else/* 修改 */epoll_ctl (backend_fd, EPOLL_CTL_MOD, fd, &ev); }
事件轮询处理
staticvoidepoll_poll (EV_P_ev_tstamptimeout) { intres=epoll_wait (backend_fd, epoll_events, epoll_eventmax, epoll_wait_timeout (timeout)); for (inti=0; i<res; ++i) { structepoll_event*e=epoll_events+i; intfd=e->data.fd; if (ecb_expect_true (fd >= 0&&fd<anfdmax&&anfds [fd].events)) { /* 将epoll事件转换回libev事件 */intrevents=0; if (e->events& (EPOLLIN | EPOLLERR | EPOLLHUP)) revents |= EV_READ; if (e->events& (EPOLLOUT | EPOLLERR | EPOLLHUP)) revents |= EV_WRITE; fd_event (EV_A_fd, revents); } elsepipe_write_wanted=1; /* probably a pipe was closed */ } }
3.2 kqueue后端实现
kevent操作封装
/* ev_kqueue.c - kqueue后端实现 */staticvoidkqueue_modify (EV_P_intfd, intoev, intnev) { /* 删除旧事件 */if (oev&EV_READ) EV_KQUEUE_MODIFY (fd, EVFILT_READ, EV_DELETE); if (oev&EV_WRITE) EV_KQUEUE_MODIFY (fd, EVFILT_WRITE, EV_DELETE); /* 添加新事件 */if (nev&EV_READ) EV_KQUEUE_MODIFY (fd, EVFILT_READ, EV_ADD); if (nev&EV_WRITE) EV_KQUEUE_MODIFY (fd, EVFILT_WRITE, EV_ADD); }/* kqueue事件轮询 */staticvoidkqueue_poll (EV_P_ev_tstamptimeout) { structtimespects; ts.tv_sec= (long)timeout; ts.tv_nsec= (long)((timeout- (long)timeout) *1e9); intres=kevent (backend_fd, 0, 0, kqueue_events, kqueue_eventmax, &ts); for (inti=0; i<res; ++i) { structkevent*kev=kqueue_events+i; intfd=kev->ident; intrevents=0; if (kev->filter==EVFILT_READ) revents |= EV_READ; elseif (kev->filter==EVFILT_WRITE) revents |= EV_WRITE; fd_event (EV_A_fd, revents); } }
4. 事件分发机制
4.1 fd_event核心分发函数
/* ev.c - 事件分发核心 */staticvoidnoinlinefd_event_nocheck (EV_P_intfd, intrevents) { ev_io*w; /* 遍历该fd上的所有watcher */for (w= (ev_io*)anfds [fd].head; w; w= (ev_io*)((ev_watcher*)w)->next) { /* 检查事件匹配 */if (ecb_expect_true ((ev_io*)w!=&pipe_w)) /* 排除内部pipe */if (ecb_expect_true (w->events&revents)) { /* 设置pending状态并加入处理队列 */w->pending=1; pendings [ABSPRI (w)][w->pending-1].w= (ev_watcher*)w; pendingpri=NUMPRI; /* force recalculation */ } } }
4.2 批量事件处理优化
/* 事件就绪后的批量处理 */staticvoidev_invoke_pending (EV_P) { pendingpri=NUMPRI; while (pendingpri) /* 按优先级处理 */ { --pendingpri; while (pendings [pendingpri]) { ANPENDING*p=pendings [pendingpri]; /* 移除pending状态 */p->w->pending=0; array_del (pendings [pendingpri], p); /* 执行用户回调 */ev_invoke (EV_A_p->w, p->events); } } }
5. 内存管理优化
5.1 动态数组扩容
/* anfds数组动态扩容 */staticvoid*anfds_resize (void*base, int*cur, intmax) { returnev_realloc (base, max*sizeof (ev_watcher_list)); }/* fd数组大小管理 */staticvoidnoinlinearray_needsize_anfd (void) { intoldmax=anfdmax; /* 按需扩容 */while (anfdmax<fdchangemax) anfdmax=anfdmax ? anfdmax*2 : 128; if (anfdmax>oldmax) { anfds= (ev_watcher_list*)anfds_resize (anfds, &oldmax, anfdmax); /* 初始化新分配的元素 */for (inti=oldmax; i<anfdmax; ++i) { anfds [i].events=0; anfds [i].head=0; } } }
5.2 链表操作优化
/* 双向链表插入 */inline_speedvoidarray_add (ev_watcher_list*head, ev_watcher_list*item) { item->next=head->next; item->prev=head; head->next->prev=item; head->next=item; }/* 双向链表删除 */inline_speedvoidarray_del (ev_watcher_list*head, ev_watcher_list*item) { item->prev->next=item->next; item->next->prev=item->prev; }
6. 性能优化技术
6.1 缓存友好设计
/* 连续内存访问优化 */VAR(int, fdchanges, [FD_CHANGES], , 0) /* fd变更缓冲区 */VAR(int, fdchangecnt, , , 0) /* 变更计数 *//* 批量处理fd变更 */staticvoidfd_reify (EV_P_intfd) { if (fdchangecnt) { /* 按顺序批量处理变更 */for (inti=0; i<fdchangecnt; ++i) { intchfd=fdchanges [i]; /* 调用backend_modify更新注册 */backend_modify (EV_A_chfd, anfds_old [chfd].events, anfds [chfd].events); } fdchangecnt=0; } }
6.2 分支预测优化
/* 热点路径优化 */if (ecb_expect_true (fd >= 0&&fd<anfdmax&&anfds [fd].events)) { /* 常见情况: 有效fd且有待处理事件 */fd_event (EV_A_fd, revents); }else { /* 异常情况: 无效fd或无事件 */pipe_write_wanted=1; }
7. 错误处理与恢复
7.1 fd有效性检查
/* fd事件处理前的安全检查 */staticvoidfd_event (EV_P_intfd, intrevents) { /* 边界检查 */if (ecb_expect_false (fd<0||fd >= anfdmax)) return; /* 事件有效性检查 */if (ecb_expect_false (!anfds [fd].events)) return; /* 调用实际处理函数 */fd_event_nocheck (EV_A_fd, revents); }
7.2 资源清理机制
/* 异常情况下清理fd资源 */staticvoidfd_kill (EV_P_intfd) { /* 从backend中移除 */if (backend_modify) backend_modify (EV_A_fd, anfds [fd].events, 0); /* 清理pending状态 */for (ev_io*w= (ev_io*)anfds [fd].head; w; ) { ev_io*next= (ev_io*)((ev_watcher*)w)->next; if (w->pending) { clear_pending (EV_A_ (ev_watcher*)w); w->pending=0; } w=next; } }
8. 平台差异化处理
8.1 Windows平台适配
#ifdef_WIN32/* Windows使用WSAEventSelect */staticvoidselect_modify (EV_P_intfd, intoev, intnev) { if (nev) { longnet_events=0; if (nev&EV_READ) net_events |= FD_READ | FD_ACCEPT | FD_CLOSE; if (nev&EV_WRITE) net_events |= FD_WRITE | FD_CONNECT | FD_CLOSE; WSAEventSelect (fd, backend_fd, net_events); } else { WSAEventSelect (fd, 0, 0); } }#endif
8.2 不同后端的事件映射
/* 事件类型转换表 */staticconstintevent_map[][2] = { { EPOLLIN, EV_READ }, { EPOLLOUT, EV_WRITE }, { EPOLLERR, EV_READ | EV_WRITE }, { EPOLLHUP, EV_READ | EV_WRITE }, { 0, 0 } };/* 通用事件转换函数 */staticintmap_events (intbackend_events, constintmap[][2]) { intlibev_events=0; for (inti=0; map[i][0]; ++i) if (backend_events&map[i][0]) libev_events |= map[i][1]; returnlibev_events; }
9. 调试与监控机制
9.1 状态验证
/* IO watcher状态一致性检查 */staticvoidverify_io_watchers (EV_P) { for (intfd=0; fd<anfdmax; ++fd) { if (anfds [fd].events) { /* 验证fd上有活跃的watcher */intfound=0; for (ev_io*w= (ev_io*)anfds [fd].head; w; w= (ev_io*)((ev_watcher*)w)->next) { assert (("fd mismatch", w->fd==fd)); assert (("events mask inconsistent", w->events&anfds [fd].events)); found=1; } assert (("no watchers found for active fd", found)); } } }
9.2 性能统计
#ifEV_STATSVAR(unsigned long, fd_event_count, , , 0) /* fd事件处理次数 */VAR(unsigned long, io_callback_count, , , 0) /* IO回调调用次数 */VAR(ev_tstamp, io_processing_time, , , 0.) /* IO处理耗时 */#endif/* 性能监控包装 */staticvoidfd_event_timed (EV_P_intfd, intrevents) {#ifEV_STATSev_tstampstart=ev_time ();#endiffd_event_nocheck (EV_A_fd, revents);#ifEV_STATSio_processing_time+=ev_time () -start; ++fd_event_count;#endif}
10. 最佳实践与使用建议
10.1 性能优化建议
/* 1. 合理设置fd缓存大小 */#defineFD_CHANGES 256 /* 根据应用特点调整 */#defineANFD_INITIAL 1024 /* 初始fd数组大小 *//* 2. 批量操作IO watcher *//* 避免频繁的start/stop操作 *//* 3. 正确处理边缘触发 *//* 对于ET模式,需要循环读取直到EAGAIN */
10.2 错误处理模式
/* IO watcher回调中的错误处理 */staticvoidio_callback (EV_P_ev_io*w, intrevents) { if (revents&EV_ERROR) { /* 处理错误状态 */handle_io_error (w->fd); ev_io_stop (EV_A_w); return; } if (revents&EV_READ) { ssize_tn=read (w->fd, buffer, sizeof(buffer)); if (n>0) process_data (buffer, n); elseif (n==0) { /* 连接关闭 */ev_io_stop (EV_A_w); close (w->fd); } elseif (errno!=EAGAIN) { /* 读取错误 */ev_io_stop (EV_A_w); close (w->fd); } } }
分析版本: v1.0源码版本: libev 4.33更新时间: 2026年3月1日
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx