夜雨聆风
夜雨聆风





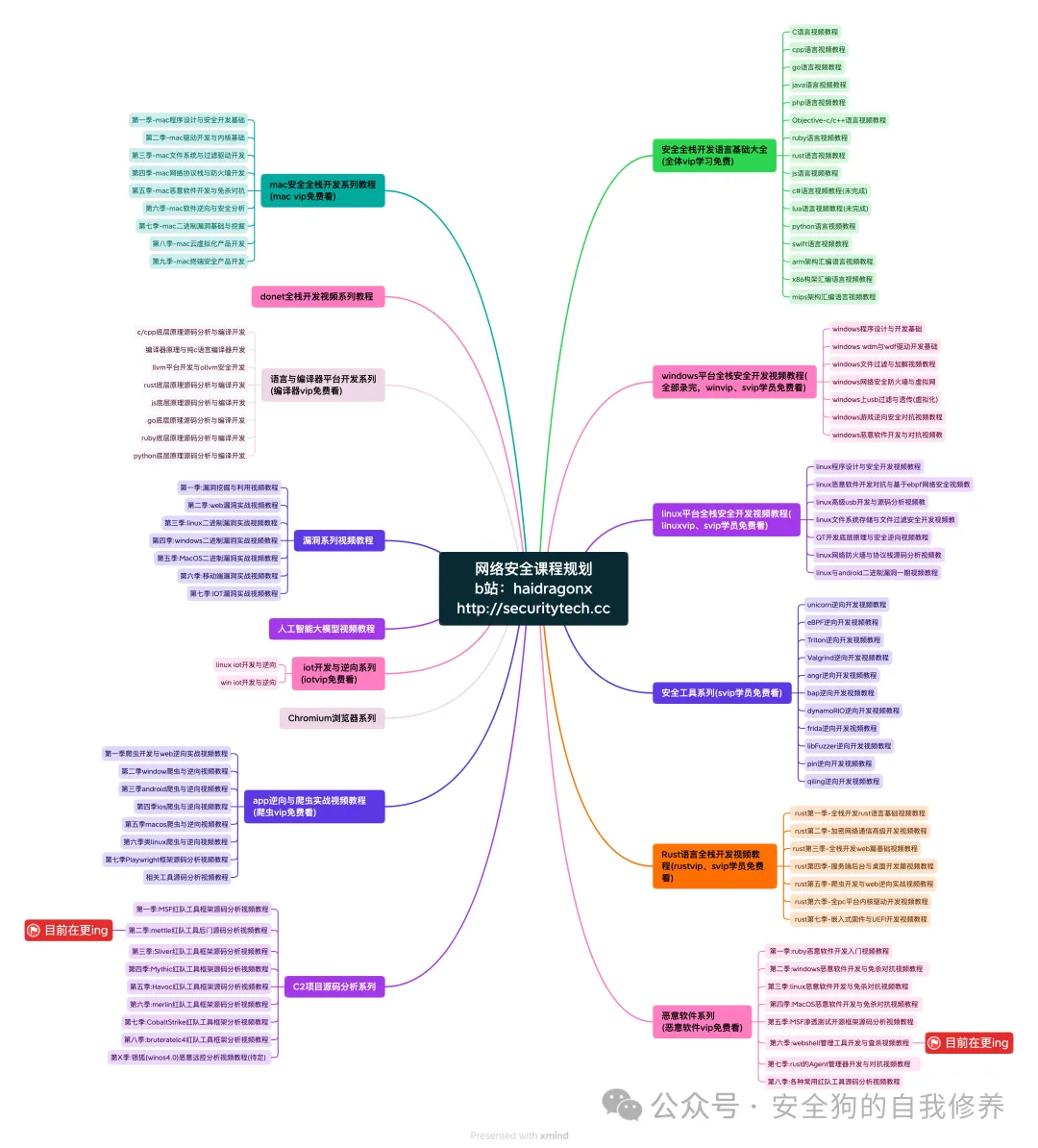
libev库源码分析系列教程(八)
源码分析mettle后门工具学习 所使用的依赖库
官网:http://securitytech.cc
libev Signal Watcher机制源码深度分析
1. Signal Watcher核心设计
1.1 设计理念
Signal Watcher采用异步信号处理机制,通过信号掩码管理和信号队列实现线程安全的信号处理,避免在信号处理函数中执行复杂操作。
1.2 数据结构定义
/* ev.h - Signal Watcher定义 */typedefstruct{ EV_WATCHER(ev_signal) intsignum; /* 信号编号 */} ev_signal;/* 信号管理相关结构 */VAR(ev_signal*, signals, [EV_NSIG-1], , 0) /* 信号到watcher映射 */VAR(sig_atomic_t, sig_pending, , , 0) /* 待处理信号计数 */VAR(sig_atomic_t, sig_atomic, , , 0) /* 原子信号标志 */
2. 信号处理机制实现
2.1 信号注册与管理
信号Watcher初始化
/* ev.c - 信号Watcher初始化 */voidev_signal_init (ev_signal*w, void (*cb)(EV_P_ev_signal*w, intrevents), intsignum) { /* 基础初始化 */EV_WATCHER_INIT(w, cb); w->signum=signum; }/* 信号Watcher启动 */voidev_signal_start (EV_P_ev_signal*w) { if (ecb_expect_false (ev_is_active (w))) return;#ifEV_MULTIPLICITY/* 多实例模式下检查信号是否已被其他loop使用 */if (signals [w->signum-1]) { /* 同一信号只能被一个loop处理 */ev_signal_stop (EV_A_signals [w->signum-1]); }#endif/* 注册信号处理函数 */ev_sighandler (w->signum, EV_SIG_CB); /* 加入信号映射表 */signals [w->signum-1] =w; /* 标记为活跃状态 */ev_start (EV_A_ (ev_watcher*)w, 1); }
2.2 信号处理函数实现
核心信号处理函数
/* ev.c - 信号处理核心函数 */staticvoid (*ev_sighandler)(intsig) =sigHandle;/* 信号处理的实际实现 */staticvoidev_signal_handle (intsig) { /* 原子操作设置信号标志 */sig_atomic=sig; /* 增加待处理信号计数 */++sig_pending; #ifEV_USE_SIGNALFD/* 使用signalfd时直接写入 */if (sigfd!=-1) { uint64_tu=1; write (sigfd, &u, sizeof (u)); }#endif#ifEV_USE_EVENTFD/* 使用eventfd时的通知机制 */if (evfd!=-1) { uint64_tu=1; write (evfd, &u, sizeof (u)); }#endif}
平台特定的信号处理
#ifdef_WIN32/* Windows平台信号处理 */staticBOOLWINAPIsig_win32_handler (DWORDdwCtrlType) { switch (dwCtrlType) { caseCTRL_C_EVENT: caseCTRL_BREAK_EVENT: ev_signal_handle (SIGINT); return TRUE; caseCTRL_CLOSE_EVENT: caseCTRL_LOGOFF_EVENT: caseCTRL_SHUTDOWN_EVENT: ev_signal_handle (SIGTERM); return TRUE; } return FALSE; }#else/* Unix平台信号处理 */staticstructsigactionsigint_act, sigterm_act;staticvoidsetup_signal_handlers (void) { structsigactionsa; sa.sa_handler=ev_signal_handle; sigemptyset (&sa.sa_mask); sa.sa_flags=SA_RESTART; /* 设置常用信号处理 */sigaction (SIGINT, &sa, &sigint_act); sigaction (SIGTERM, &sa, &sigterm_act); }#endif
3. Backend适配层实现
3.1 signalfd后端实现(Linux)
signalfd初始化
/* ev_linux.c - signalfd后端实现 */#ifEV_USE_SIGNALFDstaticvoidsigfd_init (EV_P_intflags) { sigset_tss; sigemptyset (&ss); /* 创建signalfd */sigfd=signalfd (-1, &ss, SFD_NONBLOCK | SFD_CLOEXEC); if (sigfd<0&& (errno==EINVAL||errno==ENOSYS)) sigfd=signalfd (-1, &ss, 0); if (sigfd >= 0) { fd_intern (sigfd); /* 标记为内部fd */ev_io_init (&sigfd_w, sigfdcb, sigfd, EV_READ); ev_io_start (EV_A_&sigfd_w); } }#endif
signalfd事件处理
#ifEV_USE_SIGNALFDstaticvoidsigfdcb (EV_P_ev_io*w, intrevents) { structsignalfd_siginfosi[2]; intres; /* 读取信号信息 */res=read (sigfd, si, sizeof (si)); if (res<0) return; /* 处理接收到的信号 */for (res /= sizeof (structsignalfd_siginfo); res--; ) { intsig=si[res].ssi_signo; if (sig >= 1&&sig<EV_NSIG&&signals [sig-1]) { ev_signal*w=signals [sig-1]; w->pending=1; pendings [ABSPRI (w)][w->pending-1].w= (ev_watcher*)w; pendingpri=NUMPRI; } } }#endif
3.2 传统信号处理后端
信号轮询机制
/* ev.c - 传统信号处理轮询 */staticvoidev_feed_signal_event (EV_P_intsignum) { /* 检查信号是否被监听 */if (signum >= 1&&signum<EV_NSIG&&signals [signum-1]) { ev_signal*w=signals [signum-1]; /* 检查回调函数有效性 */if (ecb_expect_false (ev_cb (w) ==SIG_IGN||ev_cb (w) ==SIG_DFL)) return; /* 设置pending状态 */w->pending=1; pendings [ABSPRI (w)][w->pending-1].w= (ev_watcher*)w; pendingpri=NUMPRI; /* force recalculation */ } }/* 事件循环中的信号检查 */staticvoidcheck_events (EV_P) { /* 检查是否有待处理信号 */if (ecb_expect_false (sig_pending)) { sig_atomic_tsig=sig_atomic; sig_atomic=0; sig_pending=0; /* 处理信号事件 */ev_feed_signal_event (EV_A_sig); } }
4. 信号掩码管理
4.1 信号阻塞与解除阻塞
/* ev.c - 信号掩码管理 */staticsigset_tfull_sigset;staticvoidblock_all_signals (void) { sigfillset (&full_sigset); sigdelset (&full_sigset, SIGILL); sigdelset (&full_sigset, SIGABRT); sigdelset (&full_sigset, SIGFPE); sigdelset (&full_sigset, SIGSEGV); /* 阻塞所有信号 */sigprocmask (SIG_BLOCK, &full_sigset, 0); }staticvoidunblock_signal (intsig) { sigset_tss; sigemptyset (&ss); sigaddset (&ss, sig); /* 解除特定信号的阻塞 */sigprocmask (SIG_UNBLOCK, &ss, 0); }
4.2 线程安全的信号处理
/* ev.c - 线程安全信号处理 */staticpthread_mutex_tsig_mutex=PTHREAD_MUTEX_INITIALIZER;staticvoidsafe_signal_install (intsig, void (*handler)(int)) { pthread_mutex_lock (&sig_mutex); structsigactionsa; sa.sa_handler=handler; sigemptyset (&sa.sa_mask); sa.sa_flags=SA_RESTART; sigaction (sig, &sa, 0); pthread_mutex_unlock (&sig_mutex); }
5. 事件分发机制
5.1 信号事件分发
/* ev.c - 信号事件分发核心 */staticvoidev_invoke_signal (EV_P_ev_signal*w, intrevents) { /* 执行用户回调函数 */ev_cb (w) (EV_A_w, revents); /* 处理一次性信号 */if (ecb_expect_false (w->repeat==0)) ev_signal_stop (EV_A_w); }/* 批量信号处理 */staticvoidprocess_pending_signals (EV_P) { for (inti=0; i<EV_NSIG-1; ++i) { ev_signal*w=signals [i]; if (w&&w->pending) { w->pending=0; ev_invoke_signal (EV_A_w, EV_SIGNAL); } } }
5.2 信号优先级处理
/* ev.c - 信号优先级管理 */staticvoidsignal_priority_adjust (ev_signal*w, intpriority) { /* 设置信号处理优先级 */w->priority=priority<0 ? 0 : priority >= NUMPRI ? NUMPRI-1 : priority; /* 重新排列pending队列 */if (w->pending) { /* 从当前优先级队列移除 */array_del (pendings [w->priority], (ANPENDING*)w); /* 添加到新优先级队列 */pendings [w->priority][w->pending-1] =*(ANPENDING*)w; } }
6. 内存管理与资源清理
6.1 信号资源管理
/* ev.c - 信号资源清理 */voidev_signal_stop (EV_P_ev_signal*w) { clear_pending (EV_A_ (ev_watcher*)w); if (ecb_expect_false (!ev_is_active (w))) return; /* 从信号映射表移除 */if (signals [w->signum-1] ==w) signals [w->signum-1] =0; /* 恢复默认信号处理 */if (!any_active_signals ()) restore_signal_handlers (); ev_stop (EV_A_ (ev_watcher*)w); }/* 检查是否还有活跃信号 */staticintany_active_signals (void) { for (inti=0; i<EV_NSIG-1; ++i) if (signals [i]) return1; return0; }
6.2 信号处理函数恢复
/* ev.c - 恢复原始信号处理函数 */staticvoidrestore_signal_handlers (void) {#ifdef_WIN32SetConsoleCtrlHandler (sig_win32_handler, FALSE);#elsesigaction (SIGINT, &sigint_act, 0); sigaction (SIGTERM, &sigterm_act, 0);#endif}
7. 性能优化技术
7.1 信号处理优化
/* ev.c - 信号处理性能优化 */staticvoidoptimized_signal_check (EV_P) { /* 使用原子操作检查信号 */if (ecb_expect_false (sig_pending)) { sig_atomic_tsig; /* 原子读取并清除 */ATOMIC_READ_CLEAR (sig_atomic, sig); sig_pending=0; /* 批量处理信号 */ev_feed_signal_event (EV_A_sig); } }/* 原子操作宏定义 */#defineATOMIC_READ_CLEAR(var, temp) \ do { \ temp = var; \ var = 0; \ } while(0)
7.2 缓存友好的信号表访问
/* ev_vars.h - 优化的信号表结构 */VAR(ev_signal*, signals, [EV_NSIG-1], , 0)/* 直接数组访问,避免哈希计算 */#defineSIGNAL_INDEX(sig) ((sig) - 1)staticinlineev_signal*get_signal_watcher (intsig) { returnecb_expect_true (sig >= 1&&sig<EV_NSIG) ? signals [SIGNAL_INDEX (sig)] : 0; }
8. 错误处理与边界情况
8.1 信号安全处理
/* ev.c - 信号安全的内存操作 */staticvolatileintsignal_safe_flag=0;staticvoidsignal_safe_operation (void (*func)(void)) { /* 在信号处理上下文中执行安全操作 */if (signal_safe_flag) return; /* 避免递归调用 */signal_safe_flag=1; func (); signal_safe_flag=0; }/* 信号处理函数中的安全操作 */staticvoidev_signal_handle_safe (intsig) { signal_safe_operation (ev_signal_handle_real); }staticvoidev_signal_handle_real (intsig) { /* 实际的信号处理逻辑 */sig_atomic=sig; ++sig_pending; #ifEV_USE_SIGNALFD||EV_USE_EVENTFDnotify_main_thread ();#endif}
8.2 信号处理限制检查
/* ev.c - 信号处理限制检查 */staticintvalidate_signal_number (intsig) { /* 检查信号编号有效性 */if (sig<1||sig >= EV_NSIG) { errno=EINVAL; return-1; } /* 检查是否为不可处理信号 */if (sig==SIGKILL||sig==SIGSTOP) { errno=EINVAL; return-1; } return0; }
9. 平台差异化实现
9.1 Windows平台适配
#ifdef_WIN32/* Windows信号处理特殊实现 */staticBOOLWINAPIconsole_ctrl_handler (DWORDdwCtrlType) { intsig=0; switch (dwCtrlType) { caseCTRL_C_EVENT: sig=SIGINT; break; caseCTRL_BREAK_EVENT: sig=SIGBREAK; break; caseCTRL_CLOSE_EVENT: sig=SIGTERM; break; caseCTRL_LOGOFF_EVENT: sig=SIGTERM; break; caseCTRL_SHUTDOWN_EVENT: sig=SIGTERM; break; default: return FALSE; } if (sig) { ev_signal_handle (sig); return TRUE; } return FALSE; }staticvoidwin32_signal_init (void) { SetConsoleCtrlHandler (console_ctrl_handler, TRUE); }#endif
9.2 不同Unix变体适配
/* BSD系统特殊处理 */#if defined(__FreeBSD__) || defined(__OpenBSD__)staticvoidbsd_signal_setup (void) { /* BSD系统的信号处理特殊要求 */structsigactionsa; sa.sa_handler=ev_signal_handle; sigemptyset (&sa.sa_mask); sa.sa_flags=SA_RESTART | SA_NOCLDSTOP; sigaction (SIGCHLD, &sa, 0); }#endif/* Solaris系统适配 */#if defined(__sun)staticvoidsolaris_signal_setup (void) { /* Solaris的信号处理特性 */sigset_tset; sigemptyset (&set); sigaddset (&set, SIGPIPE); sigprocmask (SIG_BLOCK, &set, 0); }#endif
10. 调试与监控机制
10.1 信号处理状态验证
/* ev.c - 信号处理状态检查 */staticvoidverify_signal_state (EV_P) { /* 验证信号映射表一致性 */for (inti=0; i<EV_NSIG-1; ++i) { ev_signal*w=signals [i]; if (w) { assert (("invalid signal number", w->signum==i+1)); assert (("inactive signal watcher marked active", ev_is_active (w))); } } /* 验证信号计数器 */intactual_pending=0; for (inti=0; i<EV_NSIG-1; ++i) if (signals [i] &&signals [i]->pending) ++actual_pending; assert (("signal pending count mismatch", actual_pending==sig_pending)); }/* 定期验证 */#ifEV_VERIFYstaticvoidperiodic_signal_verification (EV_P) { if (++verify_counter >= VERIFY_INTERVAL) { verify_counter=0; verify_signal_state (EV_A); } }#endif
10.2 性能统计与监控
#ifEV_STATSVAR(unsigned long, signal_received_count, , , 0) /* 接收信号计数 */VAR(unsigned long, signal_processed_count, , , 0) /* 处理信号计数 */VAR(ev_tstamp, signal_latency_sum, , , 0.) /* 信号延迟统计 */VAR(unsigned long, signal_max_latency, , , 0) /* 最大延迟记录 */#endif/* 性能监控增强 */staticvoidsignal_monitor_wrapper (EV_P_intsig) {#ifEV_STATSev_tstampreceive_time=ev_now (EV_A);#endifev_signal_handle (sig);#ifEV_STATSev_tstampprocess_time=ev_now (EV_A); ev_tstamplatency=process_time-receive_time; signal_received_count++; signal_latency_sum+=latency; if (latency>signal_max_latency) signal_max_latency=latency;#endif}
11. 最佳实践与使用建议
11.1 信号处理最佳实践
/* 1. 正确的信号处理模式 */staticvoidproper_signal_handler (EV_P_ev_signal*w, intrevents) { intsig=w->signum; switch (sig) { caseSIGINT: caseSIGTERM: /* 优雅关闭 */graceful_shutdown (); ev_break (EV_A_EVBREAK_ALL); break; caseSIGUSR1: /* 用户自定义信号 */reload_configuration (); break; caseSIGPIPE: /* 忽略管道破裂信号 */break; default: /* 其他信号的通用处理 */log_signal (sig); break; } }/* 2. 避免在信号处理中做复杂操作 */staticvoidlightweight_signal_callback (EV_P_ev_signal*w, intrevents) { /* 只设置标志位,不在信号处理中执行复杂逻辑 */signal_received_flag=w->signum; /* 唤醒主事件循环 */ev_async_send (EV_A_&async_watcher); }
11.2 性能调优建议
/* 1. 合理设置信号处理优先级 */#defineSIGNAL_PRIORITY_CRITICAL 0 /* 关键信号(如SIGINT) */#defineSIGNAL_PRIORITY_NORMAL 1 /* 普通信号 */#defineSIGNAL_PRIORITY_LOW 2 /* 低优先级信号 *//* 2. 批量信号处理优化 */staticvoidbatch_signal_processing (EV_P) { /* 在事件循环的适当位置批量处理信号 */if (sig_pending>BATCH_THRESHOLD) { /* 执行批量信号处理 */process_pending_signals_batch (EV_A); } }/* 3. 信号去抖动处理 */staticev_tstamplast_signal_time[EV_NSIG];staticconstev_tstampSIGNAL_DEBOUNCE_INTERVAL=0.1; /* 100ms */staticintshould_process_signal (EV_P_intsig) { ev_tstampnow=ev_now (EV_A); if (now-last_signal_time[sig] >= SIGNAL_DEBOUNCE_INTERVAL) { last_signal_time[sig] =now; return1; } return0; }
分析版本: v1.0源码版本: libev 4.33更新时间: 2026年3月1日
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx