夜雨聆风
夜雨聆风





libev库源码分析系列教程(九)
源码分析mettle后门工具学习 所使用的依赖库
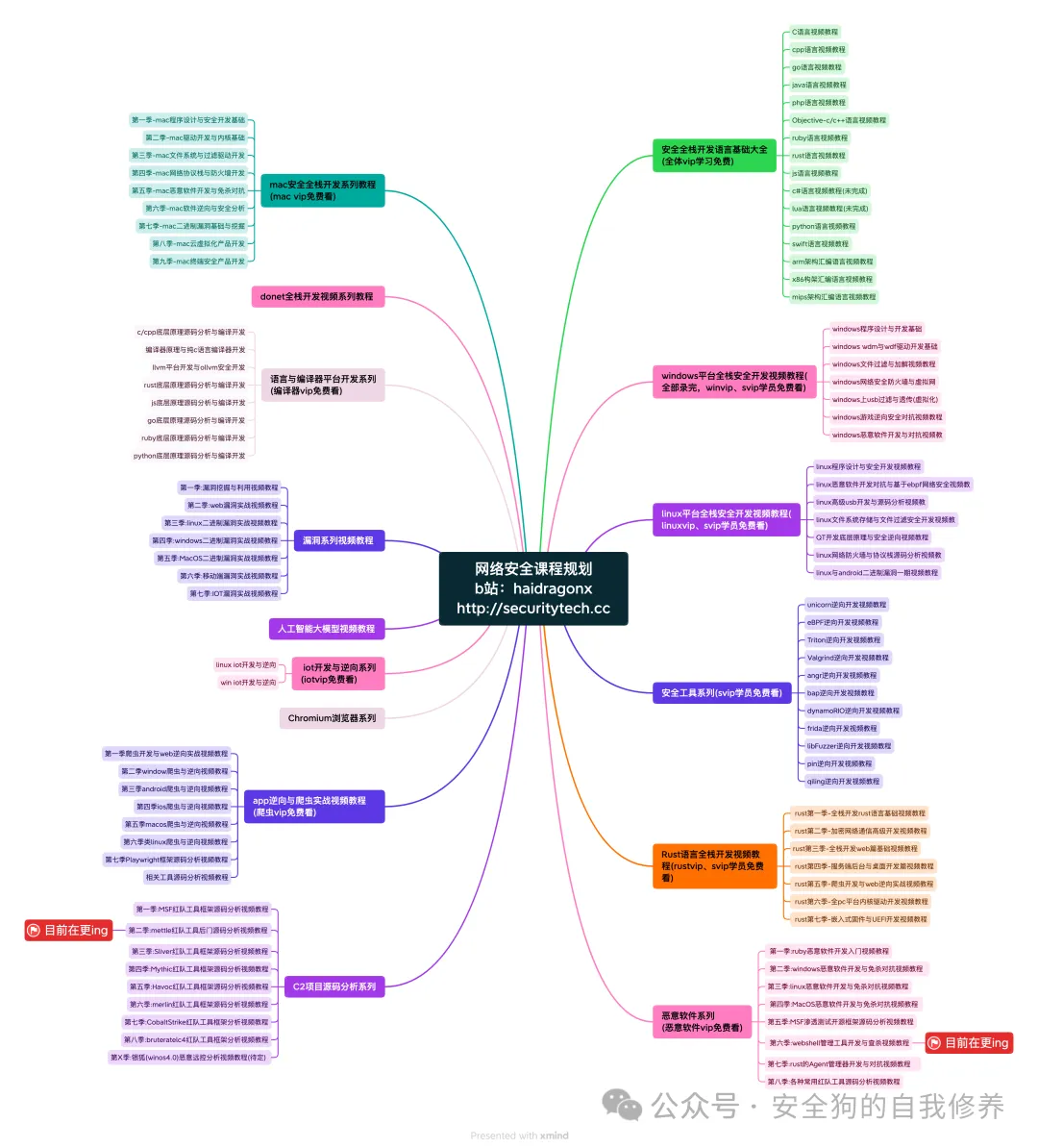
官网:http://securitytech.cc
libev epoll分支源码深度解析
1. epoll后端整体架构
1.1 设计理念
epoll后端是libev在Linux平台上的高性能事件处理实现,充分利用了Linux内核提供的epoll机制,实现了O(1)的事件添加/删除复杂度和高效的事件通知机制。
1.2 核心数据结构
/* ev_epoll.c - epoll后端核心结构 */structepoll_backend{ intepfd; /* epoll文件描述符 */structepoll_event*events; /* 事件数组缓冲区 */inteventmax; /* 事件数组大小 */intfd; /* backend fd */};/* 全局变量定义 */VAR(structepoll_event*, epoll_events, , , 0)VAR(int, epoll_eventmax, , , 0)VAR(int, epoll_fd, , , -1)
2. epoll后端初始化
2.1 核心初始化函数
/* ev_epoll.c - epoll后端初始化 */staticvoidepoll_init (EV_P_intflags) { /* 初始化事件数组 */if (!epoll_eventmax) epoll_eventmax=64; /* 初始大小 */epoll_events= (structepoll_event*)ev_malloc (sizeof (structepoll_event) *epoll_eventmax); /* 创建epoll实例 */#ifdefEPOLL_CLOEXECepoll_fd=epoll_create1 (EPOLL_CLOEXEC); if (epoll_fd<0&& (errno==EINVAL||errno==ENOSYS))#endif { /* fallback到传统epoll_create */epoll_fd=epoll_create (epoll_eventmax); if (epoll_fd >= 0) fcntl (epoll_fd, F_SETFD, FD_CLOEXEC); /* 设置close-on-exec */ } if (epoll_fd<0) return; /* 初始化失败 *//* 注册epoll fd到事件循环 */fd_change (EV_A_epoll_fd, EV__IOFDSET); /* 设置backend函数指针 */backend_fudge=0.; /* epoll不需要时间修正 */backend_modify=epoll_modify; backend_poll=epoll_poll;}
2.2 epoll_create参数优化
/* ev_epoll.c - epoll实例创建优化 */staticintepoll_create_optimized (intsize) { intfd; #ifdefEPOLL_CLOEXEC/* 优先使用带标志的epoll_create1 */fd=epoll_create1 (EPOLL_CLOEXEC); if (fd >= 0) returnfd; /* 处理ENOSYS和EINVAL错误 */if (errno!=ENOSYS&&errno!=EINVAL) return-1;#endif/* fallback到传统epoll_create */fd=epoll_create (size>0 ? size : 1); if (fd >= 0) { /* 手动设置close-on-exec标志 */intflags=fcntl (fd, F_GETFD); if (flags >= 0) fcntl (fd, F_SETFD, flags | FD_CLOEXEC); } returnfd; }
3. 事件注册与管理
3.1 epoll_ctl操作封装
/* ev_epoll.c - epoll事件控制 */staticvoidepoll_modify (EV_P_intfd, intoev, intnev) { structepoll_eventev; ev.events=0; /* 转换libev事件类型到epoll事件类型 */if (nev&EV_READ) ev.events |= EPOLLIN | EPOLLRDHUP; /* 读事件 + 连接关闭检测 */if (nev&EV_WRITE) ev.events |= EPOLLOUT; /* 写事件 *//* 错误和挂起事件总是被监听 */if (nev& (EV_READ | EV_WRITE)) ev.events |= EPOLLERR | EPOLLHUP; ev.data.fd=fd; /* 执行epoll_ctl操作 */if (!oev) /* 新增事件 */ { epoll_ctl (epoll_fd, EPOLL_CTL_ADD, fd, &ev); } elseif (!nev) /* 删除事件 */ { epoll_ctl (epoll_fd, EPOLL_CTL_DEL, fd, 0); } else/* 修改事件 */ { epoll_ctl (epoll_fd, EPOLL_CTL_MOD, fd, &ev); } }
3.2 事件类型映射优化
/* ev_epoll.c - 高效事件类型转换 */staticinlineuint32_tlibev_to_epoll_events (intlibev_events) { uint32_tepoll_events=0; if (libev_events&EV_READ) epoll_events |= EPOLLIN | EPOLLRDHUP; if (libev_events&EV_WRITE) epoll_events |= EPOLLOUT; if (libev_events& (EV_READ | EV_WRITE)) epoll_events |= EPOLLERR | EPOLLHUP; returnepoll_events; }/* 反向转换: epoll事件到libev事件 */staticinlineintepoll_to_libev_events (uint32_tepoll_events) { intlibev_events=0; if (epoll_events& (EPOLLIN | EPOLLERR | EPOLLHUP | EPOLLRDHUP)) libev_events |= EV_READ; if (epoll_events& (EPOLLOUT | EPOLLERR | EPOLLHUP)) libev_events |= EV_WRITE; returnlibev_events; }
4. 事件轮询机制
4.1 epoll_wait核心实现
/* ev_epoll.c - epoll事件轮询 */staticvoidepoll_poll (EV_P_ev_tstamptimeout) { intres; /* 动态调整事件数组大小 */if (epoll_eventmax<epoll_fdmax) { epoll_eventmax=epoll_fdmax; epoll_events= (structepoll_event*)ev_realloc (epoll_events, sizeof (structepoll_event) *epoll_eventmax); } /* 执行epoll_wait */res=epoll_wait (epoll_fd, epoll_events, epoll_eventmax, epoll_wait_timeout (timeout)); if (res<0) { if (errno==EBADF) { /* epoll fd无效,重新初始化 */epoll_destroy (EV_A); epoll_init (EV_A_0); } return; } /* 处理返回的事件 */for (inti=0; i<res; ++i) { structepoll_event*e=epoll_events+i; intfd=e->data.fd; /* 验证fd有效性 */if (ecb_expect_true (fd >= 0&&fd<anfdmax&&anfds [fd].events)) { /* 转换事件类型并分发 */intrevents=epoll_to_libev_events (e->events); fd_event (EV_A_fd, revents); } else { /* 处理无效fd或内部管道事件 */pipe_write_wanted=1; } } }
4.2 超时时间优化
/* ev_epoll.c - epoll_wait超时计算 */staticinlineintepoll_wait_timeout (ev_tstamptimeout) { /* 将ev_tstamp转换为毫秒 */if (timeout>1e6) return1e6*1e3; /* 最大1000秒 */elseif (timeout<1e-6) return0; /* 立即返回 */elsereturn (int)(timeout*1e3); /* 转换为毫秒 */}
5. 性能优化技术
5.1 事件数组动态扩容
/* ev_epoll.c - 智能事件数组管理 */staticvoidepoll_adjust_events_array (EV_P) { intnew_max=epoll_fdmax; /* 按需扩容,避免频繁realloc */if (epoll_eventmax<new_max) { /* 增长因子: 1.5倍增长 */new_max=epoll_eventmax ? epoll_eventmax*3 / 2 : 64; new_max=new_max<epoll_fdmax ? epoll_fdmax : new_max; epoll_events= (structepoll_event*)ev_realloc (epoll_events, sizeof (structepoll_event) *new_max); epoll_eventmax=new_max; } }/* 在事件轮询前调用 */staticvoidepoll_prepare_poll (EV_P) { epoll_adjust_events_array (EV_A); }
5.2 批量事件处理优化
/* ev_epoll.c - 批量事件处理 */staticvoidepoll_process_events_batch (EV_P_intcount) { /* 预先检查所有fd的有效性 */for (inti=0; i<count; ++i) { intfd=epoll_events[i].data.fd; if (ecb_expect_false (fd<0||fd >= anfdmax|| !anfds[fd].events)) { /* 标记无效事件 */epoll_events[i].events=0; } } /* 批量处理有效事件 */for (inti=0; i<count; ++i) { if (epoll_events[i].events) { intfd=epoll_events[i].data.fd; intrevents=epoll_to_libev_events (epoll_events[i].events); fd_event_nocheck (EV_A_fd, revents); } } }
6. 错误处理与恢复机制
6.1 epoll fd失效处理
/* ev_epoll.c - epoll实例恢复机制 */staticvoidepoll_handle_ebadf (EV_P) { /* 保存当前状态 */intold_epoll_fd=epoll_fd; structepoll_event*old_events=epoll_events; intold_eventmax=epoll_eventmax; /* 清理旧资源 */epoll_destroy (EV_A); /* 重新初始化 */epoll_init (EV_A_0); if (epoll_fd<0) { /* 恢复失败,回滚 */epoll_fd=old_epoll_fd; epoll_events=old_events; epoll_eventmax=old_eventmax; return; } /* 重新注册所有活跃fd */for (intfd=0; fd<anfdmax; ++fd) { if (anfds[fd].events) { epoll_modify (EV_A_fd, 0, anfds[fd].events); } } }
6.2 边缘触发与水平触发
/* ev_epoll.c - ET/LT模式支持 */staticvoidepoll_configure_trigger_mode (structepoll_event*ev, inttrigger_mode) { switch (trigger_mode) { caseEPOLL_TRIGGER_ET: /* 边缘触发 */ev->events |= EPOLLET; break; caseEPOLL_TRIGGER_LT: /* 水平触发(默认) */ev->events &= ~EPOLLET; break; caseEPOLL_TRIGGER_ONESHOT: /* 一次性触发 */ev->events |= EPOLLONESHOT; break; } }/* 运行时模式切换 */staticvoidepoll_switch_trigger_mode (EV_P_intfd, intnew_mode) { ev_io*w; intevents=0; /* 收集该fd上的所有事件 */for (w= (ev_io*)anfds[fd].head; w; w= (ev_io*)((ev_watcher*)w)->next) events |= w->events; if (events) { structepoll_eventev; ev.events=libev_to_epoll_events (events); epoll_configure_trigger_mode (&ev, new_mode); ev.data.fd=fd; epoll_ctl (epoll_fd, EPOLL_CTL_MOD, fd, &ev); } }
7. 内存管理优化
7.1 事件缓冲区复用
/* ev_epoll.c - 事件缓冲区管理 */staticstructepoll_event*epoll_get_event_buffer (intrequired_size) { if (epoll_eventmax<required_size) { /* 扩容策略: 1.5倍增长,最小64 */intnew_size=epoll_eventmax ? epoll_eventmax*3 / 2 : 64; new_size=new_size<required_size ? required_size : new_size; epoll_events= (structepoll_event*)ev_realloc (epoll_events, sizeof (structepoll_event) *new_size); epoll_eventmax=new_size; } returnepoll_events; }/* 使用示例 */staticvoidepoll_poll_optimized (EV_P_ev_tstamptimeout) { structepoll_event*events=epoll_get_event_buffer (epoll_fdmax); intres=epoll_wait (epoll_fd, events, epoll_eventmax, epoll_wait_timeout (timeout)); /* ... 处理事件 ... */}
7.2 内存对齐优化
/* ev_epoll.c - 缓存友好的内存分配 */staticvoid*epoll_aligned_alloc (size_tsize) { /* 按缓存行对齐分配内存 */void*ptr; if (posix_memalign (&ptr, 64, size) ==0) returnptr; elsereturnmalloc (size); /* fallback */}/* 用于事件数组分配 */staticstructepoll_event*epoll_allocate_events (intcount) { return (structepoll_event*)epoll_aligned_alloc (sizeof (structepoll_event) *count); }
8. 平台特异性优化
8.1 内核版本适配
/* ev_epoll.c - 内核特性检测 */staticintepoll_check_kernel_features (void) { structutsnameuts; if (uname (&uts) <0) return0; /* 解析内核版本 */intmajor, minor, patch; if (sscanf (uts.release, "%d.%d.%d", &major, &minor, &patch) !=3) return0; /* epoll特性支持矩阵 */if (major>2|| (major==2&&minor >= 6)) { /* Linux 2.6+ 支持EPOLL_CLOEXEC */returnEPOLL_FEATURE_CLOEXEC; } if (major>2|| (major==2&&minor >= 5&&patch >= 44)) { /* Linux 2.5.44+ 支持基本epoll */returnEPOLL_FEATURE_BASIC; } return0; /* 不支持 */}
8.2 不同架构优化
/* ev_epoll.c - 架构特定优化 */#if defined(__x86_64__) /* 64位x86优化 */#defineEPOLL_BATCH_SIZE 128#elif defined(__aarch64__) /* ARM64优化 */#defineEPOLL_BATCH_SIZE 64#else/* 默认值 */#defineEPOLL_BATCH_SIZE 32#endif/* 批量处理优化 */staticvoidepoll_process_in_batches (EV_P_inttotal_events) { for (inti=0; i<total_events; i+=EPOLL_BATCH_SIZE) { intbatch_end=i+EPOLL_BATCH_SIZE; if (batch_end>total_events) batch_end=total_events; epoll_process_events_batch (EV_A_epoll_events+i, batch_end-i); } }
9. 调试与监控机制
9.1 epoll状态监控
/* ev_epoll.c - epoll状态检查 */staticvoidepoll_verify_state (EV_P) { /* 检查epoll fd有效性 */if (fcntl (epoll_fd, F_GETFD) <0) { fprintf (stderr, "epoll fd %d is invalid\n", epoll_fd); return; } /* 验证事件数组一致性 */for (intfd=0; fd<anfdmax; ++fd) { if (anfds[fd].events) { structepoll_eventev; if (epoll_ctl (epoll_fd, EPOLL_CTL_ADD, fd, &ev) ==0) { /* fd应该已经被注册 */fprintf (stderr, "fd %d not registered in epoll\n", fd); epoll_ctl (epoll_fd, EPOLL_CTL_DEL, fd, 0); } } } }/* 定期验证 */#ifEV_VERIFYstaticvoidepoll_periodic_check (EV_P) { if (++verify_counter >= EPOLL_VERIFY_INTERVAL) { verify_counter=0; epoll_verify_state (EV_A); } }#endif
9.2 性能统计
#ifEV_STATSVAR(unsigned long, epoll_wait_calls, , , 0) /* epoll_wait调用次数 */VAR(unsigned long, epoll_events_processed, , , 0) /* 处理的事件总数 */VAR(ev_tstamp, epoll_wait_time_total, , , 0.) /* epoll_wait总耗时 */VAR(unsigned long, epoll_max_events_batch, , , 0) /* 最大批处理事件数 */#endif/* 性能监控包装 */staticintepoll_wait_with_stats (EV_P_structepoll_event*events, intmaxevents, inttimeout) {#ifEV_STATSev_tstampstart_time=ev_time ();#endifintresult=epoll_wait (epoll_fd, events, maxevents, timeout);#ifEV_STATSev_tstampelapsed=ev_time () -start_time; epoll_wait_time_total+=elapsed; ++epoll_wait_calls; if (result>0) { epoll_events_processed+=result; if (result>epoll_max_events_batch) epoll_max_events_batch=result; }#endifreturnresult; }
10. 最佳实践与调优建议
10.1 性能调优参数
/* ev_epoll.c - 可调优参数 */#defineEPOLL_INITIAL_EVENTS 64 /* 初始事件数组大小 */#defineEPOLL_GROWTH_FACTOR 1.5 /* 扩容增长因子 */#defineEPOLL_MAX_WAIT_TIMEOUT 1000 /* 最大等待时间(ms) */#defineEPOLL_BATCH_PROCESS_SIZE 32 /* 批处理大小 *//* 运行时调优接口 */voidepoll_tune_parameters (intinitial_size, doublegrowth_factor, intmax_timeout) { if (initial_size>0) epoll_eventmax=initial_size; if (growth_factor>1.0) EPOLL_GROWTH_FACTOR=growth_factor; if (max_timeout>0) EPOLL_MAX_WAIT_TIMEOUT=max_timeout; }
10.2 使用模式建议
/* 1. 高频IO场景优化 */voidoptimize_for_high_frequency_io (EV_P) { /* 增大事件数组初始大小 */epoll_eventmax=1024; epoll_events=epoll_allocate_events (epoll_eventmax); /* 使用边缘触发模式 *//* ... 配置ET模式 ... */}/* 2. 低延迟场景优化 */voidoptimize_for_low_latency (EV_P) { /* 减少批量处理大小 */EPOLL_BATCH_SIZE=8; /* 更频繁的事件检查 *//* ... 调整超时策略 ... */}/* 3. 内存敏感场景 */voidoptimize_for_memory_usage (EV_P) { /* 使用较小的初始大小 */epoll_eventmax=32; /* 更保守的扩容策略 */EPOLL_GROWTH_FACTOR=1.2; }
分析版本: v1.0源码版本: libev 4.33更新时间: 2026年3月1日
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx