夜雨聆风
夜雨聆风





libev库源码分析系列教程(十一)
源码分析mettle后门工具学习 所使用的依赖库
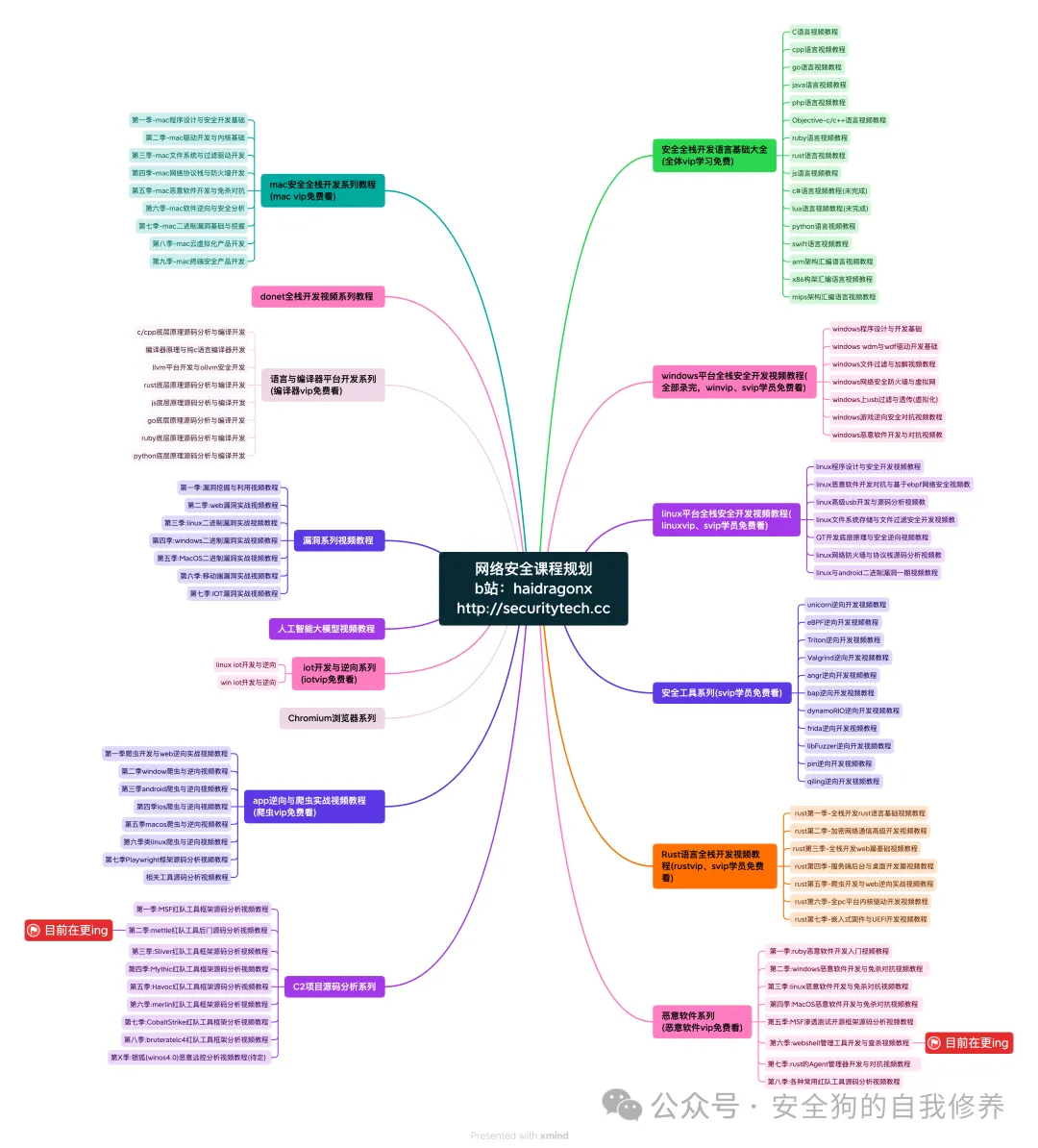
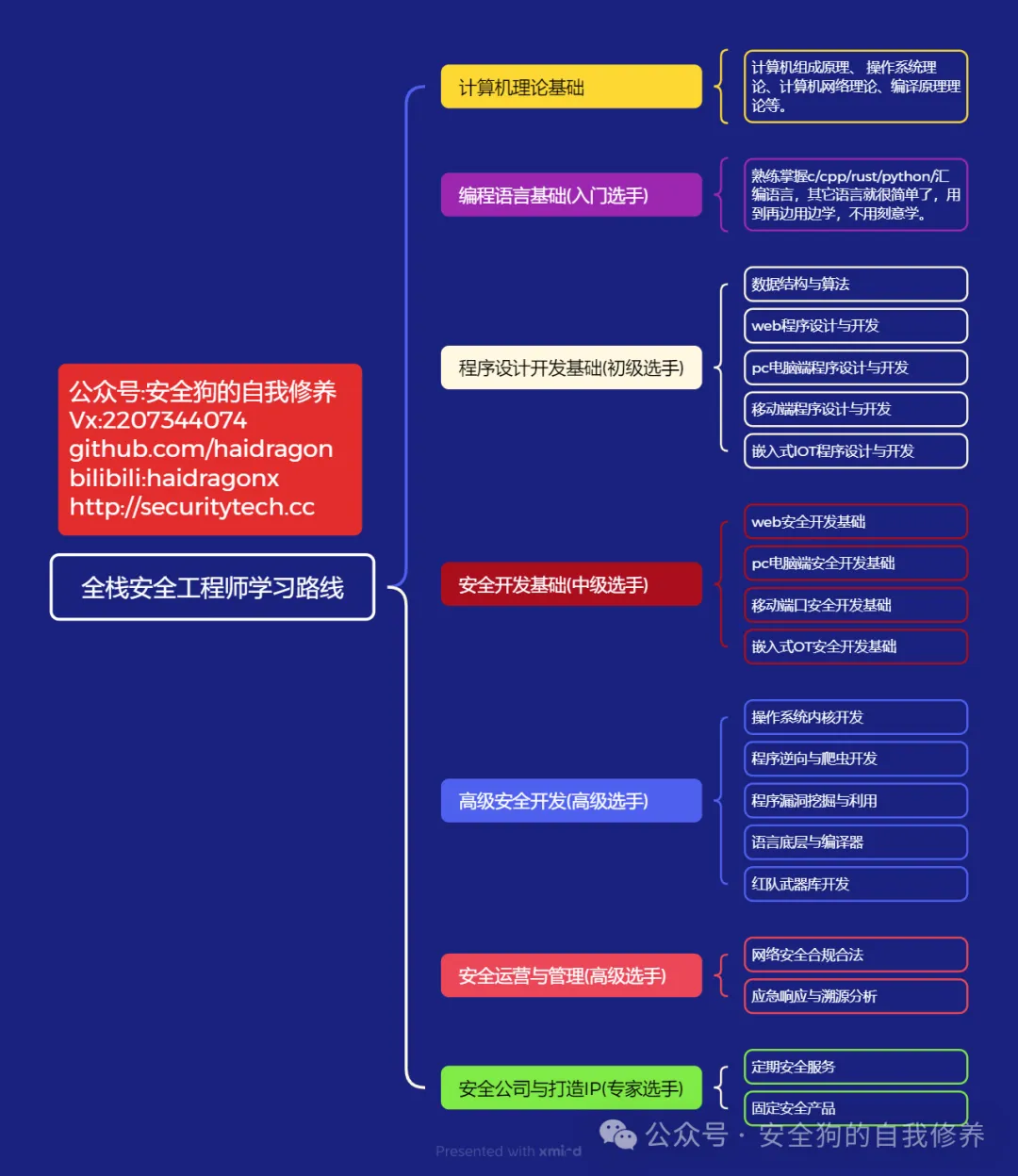
官网:http://securitytech.cc
-
libev Select/Poll/完成端口兼容实现深度解析
1. 兼容层整体架构
1.1 设计理念
libev通过统一的Backend接口抽象,为不同平台提供select、poll和Windows完成端口(IOCP)的兼容实现,确保在缺乏现代事件通知机制的环境中仍能正常工作。
1.2 核心兼容层设计
/* ev_select.c/poll.c - 兼容层统一接口 */structcompat_backend{ intmaxfd; /* 当前最大fd */intfd_setsize; /* fd集合大小 */fd_set*rfds; /* 读事件集合 */fd_set*wfds; /* 写事件集合 */fd_set*rfds_copy; /* 读事件副本 */fd_set*wfds_copy; /* 写事件副本 */structpollfd*pfds; /* poll fd数组 */intpfds_count; /* poll fd计数 */};/* Windows IOCP相关结构 */#ifdef_WIN32structiocp_backend{ HANDLEiocp_handle; /* 完成端口句柄 */OVERLAPPED_ENTRY*entries; /* 完成包数组 */ULONGentries_count; /* 完成包数量 */SOCKET*sockets; /* 套接字数组 */intsocket_count; /* 套接字数量 */};#endif
2. Select后端实现
2.1 Select初始化与配置
/* ev_select.c - select后端初始化 */staticvoidselect_init (EV_P_intflags) { /* 获取系统限制 */select_maxfds=getdtablesize (); /* 处理FD_SETSIZE限制 */if (select_maxfds>FD_SETSIZE) select_maxfds=FD_SETSIZE; /* 分配fd集合内存 */select_rfds=ev_malloc (sizeof (fd_set)); select_wfds=ev_malloc (sizeof (fd_set)); select_rfds_copy=ev_malloc (sizeof (fd_set)); select_wfds_copy=ev_malloc (sizeof (fd_set)); FD_ZERO (select_rfds); FD_ZERO (select_wfds); /* 设置backend函数指针 */backend_modify=select_modify; backend_poll=select_poll; backend_fudge=1e-6; /* select需要时间修正 */}/* fd集合动态管理 */staticvoidselect_adjust_fds (EV_P) { /* 确保fd不超过FD_SETSIZE限制 */if (select_maxfd >= FD_SETSIZE) { /* 清理超出范围的fd */for (intfd=FD_SETSIZE; fd <= select_maxfd; ++fd) { if (FD_ISSET (fd, select_rfds)) FD_CLR (fd, select_rfds); if (FD_ISSET (fd, select_wfds)) FD_CLR (fd, select_wfds); } select_maxfd=FD_SETSIZE-1; } }
2.2 Select事件管理
/* ev_select.c - select事件控制 */staticvoidselect_modify (EV_P_intfd, intoev, intnev) { /* 更新最大fd */if (nev&&fd>select_maxfd) select_maxfd=fd; /* 更新fd集合 */if (nev&EV_READ) FD_SET (fd, select_rfds); elseFD_CLR (fd, select_rfds); if (nev&EV_WRITE) FD_SET (fd, select_wfds); elseFD_CLR (fd, select_wfds); /* 清理超出范围的fd */select_adjust_fds (EV_A); }/* select轮询实现 */staticvoidselect_poll (EV_P_ev_tstamptimeout) { structtimevaltv; /* 准备fd集合副本 */memcpy (select_rfds_copy, select_rfds, sizeof (fd_set)); memcpy (select_wfds_copy, select_wfds, sizeof (fd_set)); /* 设置超时 */if (timeout >= 1e6) { tv.tv_sec=1e6; tv.tv_usec=0; } elseif (timeout<1e-6) { tv.tv_sec=0; tv.tv_usec=0; } else { tv.tv_sec= (long)timeout; tv.tv_usec= (long)((timeout- (long)timeout) *1e6); } /* 执行select调用 */intres=select (select_maxfd+1, select_rfds_copy, select_wfds_copy, 0, &tv); if (res<0) { if (errno==EBADF) select_handle_ebadf (EV_A); return; } /* 处理就绪事件 */if (res>0) select_process_ready_fds (EV_A_res); }/* 处理就绪fd */staticvoidselect_process_ready_fds (EV_P_intready_count) { intprocessed=0; for (intfd=0; fd <= select_maxfd&&processed<ready_count; ++fd) { intrevents=0; if (FD_ISSET (fd, select_rfds_copy)) revents |= EV_READ; if (FD_ISSET (fd, select_wfds_copy)) revents |= EV_WRITE; if (revents) { fd_event (EV_A_fd, revents); ++processed; } } }
3. Poll后端实现
3.1 Poll初始化与内存管理
/* ev_poll.c - poll后端初始化 */staticvoidpoll_init (EV_P_intflags) { pollidxs=ev_malloc (sizeof (int) *anfdmax); /* 初始化索引数组 */for (inti=0; i<anfdmax; ++i) pollidxs [i] =-1; /* 分配pollfd数组 */pollfds=ev_malloc (sizeof (structpollfd) *anfdmax); pollfdmax=0; /* 设置backend函数指针 */backend_modify=poll_modify; backend_poll=poll_poll; backend_fudge=0.; /* poll不需要时间修正 */}/* pollfd数组动态扩容 */staticvoidpoll_adjust_arrays (EV_P) { if (anfdmax>pollfdmax) { intoldmax=pollfdmax; pollfdmax=anfdmax; pollfds=ev_realloc (pollfds, sizeof (structpollfd) *pollfdmax); pollidxs=ev_realloc (pollidxs, sizeof (int) *pollfdmax); /* 初始化新分配的部分 */for (inti=oldmax; i<pollfdmax; ++i) { pollidxs [i] =-1; pollfds [i].fd=-1; pollfds [i].events=0; pollfds [i].revents=0; } } }
3.2 Poll事件管理
/* ev_poll.c - poll事件控制 */staticvoidpoll_modify (EV_P_intfd, intoev, intnev) { intidx=pollidxs [fd]; intevents=0; /* 转换事件类型 */if (nev&EV_READ) events |= POLLIN; if (nev&EV_WRITE) events |= POLLOUT; if (idx<0) /* 新增fd */ { if (nev) { idx=pollfdmax++; pollidxs [fd] =idx; pollfds [idx].fd=fd; pollfds [idx].events=events; pollfds [idx].revents=0; } } else/* 修改现有fd */ { if (nev) { pollfds [idx].events=events; } else/* 删除fd */ { /* 用最后一个元素填补空缺 */if (idx<--pollfdmax) { pollfds [idx] =pollfds [pollfdmax]; pollidxs [pollfds [idx].fd] =idx; } pollidxs [fd] =-1; } } }/* poll轮询实现 */staticvoidpoll_poll (EV_P_ev_tstamptimeout) { /* 调整数组大小 */poll_adjust_arrays (EV_A); /* 执行poll调用 */intres=poll (pollfds, pollfdmax, timeout >= 1e6 ? 1e6*1e3 : timeout<1e-6 ? 0 : (int)(timeout*1e3)); if (res<0) { if (errno==EBADF) poll_handle_ebadf (EV_A); return; } /* 处理返回事件 */if (res>0) poll_process_events (EV_A_res); }/* 处理poll事件 */staticvoidpoll_process_events (EV_P_intevent_count) { intprocessed=0; for (inti=0; i<pollfdmax&&processed<event_count; ++i) { structpollfd*pfd=&pollfds [i]; if (pfd->revents) { intrevents=0; if (pfd->revents& (POLLIN | POLLERR | POLLHUP)) revents |= EV_READ; if (pfd->revents& (POLLOUT | POLLERR | POLLHUP)) revents |= EV_WRITE; if (pfd->revents&POLLNVAL) revents |= EV_ERROR; if (revents) { fd_event (EV_A_pfd->fd, revents); ++processed; } } } }
4. Windows完成端口实现
4.1 IOCP初始化与配置
/* ev_win32.c - Windows完成端口初始化 */#ifdef_WIN32staticvoidiocp_init (EV_P_intflags) { /* 创建完成端口 */iocp_handle=CreateIoCompletionPort (INVALID_HANDLE_VALUE, NULL, 0, 0); if (!iocp_handle) return; /* 分配完成包数组 */entries_count=256; entries=malloc (sizeof (OVERLAPPED_ENTRY) *entries_count); /* 分配套接字数组 */socket_count=64; sockets=malloc (sizeof (SOCKET) *socket_count); /* 设置backend函数指针 */backend_modify=iocp_modify; backend_poll=iocp_poll; backend_fudge=0.; }/* 套接字关联到完成端口 */staticintiocp_associate_socket (SOCKETs) { if (CreateIoCompletionPort ((HANDLE)s, iocp_handle, (ULONG_PTR)s, 0)) { /* 添加到套接字数组 */if (socket_count <= socket_registered) { socket_count *= 2; sockets=realloc (sockets, sizeof (SOCKET) *socket_count); } sockets [socket_registered++] =s; return0; } return-1; }#endif
4.2 IOCP事件处理
#ifdef_WIN32/* ev_win32.c - IOCP事件控制 */staticvoidiocp_modify (EV_P_intfd, intoev, intnev) { SOCKETs= (SOCKET)fd; if (!oev&&nev) /* 新增套接字 */ { iocp_associate_socket (s); } elseif (oev&& !nev) /* 删除套接字 */ { /* 从完成端口分离 */iocp_dissociate_socket (s); } /* 更新事件监听 */if (nev&EV_READ) iocp_start_read (s); if (nev&EV_WRITE) iocp_start_write (s); }/* IOCP轮询实现 */staticvoidiocp_poll (EV_P_ev_tstamptimeout) { ULONGnum_entries; ULONGtimeout_ms=timeout >= 1e6 ? INFINITE : timeout<1e-6 ? 0 : (ULONG)(timeout*1e3); /* 等待完成包 */if (GetQueuedCompletionStatusEx (iocp_handle, entries, entries_count, &num_entries, timeout_ms, FALSE)) { /* 处理完成事件 */for (ULONGi=0; i<num_entries; ++i) { OVERLAPPED_ENTRY*entry=&entries[i]; SOCKETs= (SOCKET)entry->lpCompletionKey; DWORDbytes_transferred=entry->dwNumberOfBytesTransferred; LPOVERLAPPEDoverlapped=entry->lpOverlapped; /* 根据overlapped确定事件类型 */intrevents=iocp_overlapped_to_events (overlapped, bytes_transferred); fd_event (EV_A_ (int)s, revents); } } else { /* 处理错误 */DWORDerror=GetLastError (); if (error!=WAIT_TIMEOUT) iocp_handle_error (EV_A_error); } }/* overlapped到事件类型转换 */staticintiocp_overlapped_to_events (LPOVERLAPPEDoverlapped, DWORDbytes) { intrevents=0; /* 根据overlapped的使用方式判断事件类型 */if (overlapped==&read_overlapped) revents |= EV_READ; elseif (overlapped==&write_overlapped) revents |= EV_WRITE; elseif (overlapped==&accept_overlapped) revents |= EV_READ; /* 检查连接状态 */if (bytes==0) revents |= EV_EOF; returnrevents; }#endif
5. 性能优化技术
5.1 跨平台优化策略
/* ev.c - 后端选择优化 */staticvoidchoose_best_backend (EV_P) { /* 按性能优先级选择后端 */intbackend_priority[] = {#ifdefEV_USE_EPOLLEVPOLL,#endif#ifdefEV_USE_KQUEUEEVKQUEUE,#endif#ifdefEV_USE_PORTEVPORT,#endif#ifdefEV_USE_POLLEVPOLL,#endifEVSELECT/* fallback到select */ }; for (inti=0; i<sizeof(backend_priority)/sizeof(backend_priority[0]); ++i) { if (backend_supported (backend_priority[i])) { backend=backend_priority[i]; break; } }}/* 后端性能特征检测 */staticintbackend_performance_score (intbackend_type) { switch (backend_type) { caseEVPOLL: return100; /* 最高性能 */caseEVKQUEUE: return95; /* 高性能 */caseEVPORT: return90; /* 良好性能 */caseEVPOLL: return70; /* 中等性能 */caseEVSELECT: return50; /* 基础性能 */default: return0; } }
5.2 内存使用优化
/* ev_select.c - select内存优化 */staticvoidselect_optimize_memory (EV_P) { /* 使用位图而非fd_set减少内存占用 */size_tbitmap_size= (select_maxfds+7) / 8; uint8_t*read_bitmap=calloc (1, bitmap_size); uint8_t*write_bitmap=calloc (1, bitmap_size); /* 转换fd_set到位图 */for (intfd=0; fd<select_maxfds; ++fd) { if (FD_ISSET (fd, select_rfds)) read_bitmap[fd >> 3] |= (1 << (fd&7)); if (FD_ISSET (fd, select_wfds)) write_bitmap[fd >> 3] |= (1 << (fd&7)); } /* 使用位图进行快速查找 *//* ... 优化的事件检查逻辑 ... */}/* ev_poll.c - poll内存池管理 */staticstructpollfd*poll_get_cached_pfd (EV_P_intfd) { /* 使用对象池避免频繁分配 */staticstructpollfdpfd_cache[1024]; staticintcache_index=0; structpollfd*pfd=&pfd_cache[cache_index++]; if (cache_index >= 1024) cache_index=0; pfd->fd=fd; pfd->events=0; pfd->revents=0; returnpfd; }
6. 错误处理与兼容性
6.1 跨平台错误处理
/* ev.c - 统一错误处理 */staticvoidhandle_backend_error (EV_P_interror_code) { switch (error_code) { caseEBADF: /* fd无效,清理相关资源 */cleanup_invalid_fds (EV_A); break; caseEINVAL: /* 参数错误,重新初始化后端 */reinitialize_backend (EV_A); break; caseEMFILE: /* 文件描述符耗尽,降低资源使用 */reduce_resource_usage (EV_A); break; caseENOMEM: /* 内存不足,使用更节省内存的策略 */switch_to_low_memory_mode (EV_A); break; } }/* 平台特定错误映射 */staticintmap_system_error (intsys_error) {#ifdef_WIN32switch (sys_error) { caseWSAEBADF: returnEBADF; caseWSAEINVAL: returnEINVAL; caseWSAEMFILE: returnEMFILE; caseWSAENOBUFS: returnENOMEM; default: returnsys_error; }#elsereturnsys_error;#endif}
6.2 向后兼容性处理
/* ev_select.c - 老版本select兼容 */staticvoidselect_legacy_compatibility (EV_P) { /* 处理老系统select的限制 */#if defined(_AIX) || defined(__hpux) /* AIX和HP-UX的select有特殊限制 */select_max_timeout=100; /* 限制最大超时时间 */#endif#if defined(__sgi) /* SGI IRIX的select行为特殊 */select_use_heartbeat=1; /* 使用心跳机制 */#endif}/* ev_poll.c - poll兼容性处理 */staticvoidpoll_check_compatibility (EV_P) { /* 检查poll实现质量 */structpollfdtest_pfd= { 0, POLLIN, 0 }; /* 某些系统poll实现有bug */if (poll (&test_pfd, 1, 0) <0&&errno==EINVAL) { /* 切换到select后端 */backend=EVSELECT; select_init (EV_A_0); } }
7. 调试与监控机制
7.1 兼容层状态监控
#ifEV_STATS/* ev_select.c - select统计信息 */VAR(unsigned long, select_calls, , , 0) /* select调用次数 */VAR(unsigned long, select_ready_fds, , , 0) /* 就绪fd总数 */VAR(ev_tstamp, select_max_wait_time, , , 0.) /* 最大等待时间 */VAR(unsigned long, select_fd_limit_hits, , , 0) /* FD_SETSIZE限制触发次数 *//* ev_poll.c - poll统计信息 */VAR(unsigned long, poll_calls, , , 0) /* poll调用次数 */VAR(unsigned long, poll_ready_events, , , 0) /* 就绪事件总数 */VAR(unsigned long, poll_array_resizes, , , 0) /* 数组重分配次数 */VAR(ev_tstamp, poll_avg_wait_time, , , 0.) /* 平均等待时间 */#endif/* 性能监控包装 */staticintselect_with_monitoring (EV_P_intnfds, fd_set*rfds, fd_set*wfds, fd_set*efds, structtimeval*timeout) {#ifEV_STATSev_tstampstart_time=ev_time ();#endifintresult=select (nfds, rfds, wfds, efds, timeout);#ifEV_STATSev_tstampelapsed=ev_time () -start_time; ++select_calls; if (result>0) select_ready_fds+=result; if (elapsed>select_max_wait_time) select_max_wait_time=elapsed; if (nfds >= FD_SETSIZE) ++select_fd_limit_hits;#endifreturnresult; }
7.2 调试诊断工具
/* ev.c - 后端诊断信息 */staticvoiddump_backend_status (EV_P) { fprintf (stderr, "Backend Status:\n"); fprintf (stderr, " Type: %s\n", backend_name (backend)); fprintf (stderr, " Max FD: %d\n", anfdmax); fprintf (stderr, " Active FDs: %d\n", activecnt); switch (backend) { caseEVSELECT: fprintf (stderr, " Select Max FD: %d\n", select_maxfd); fprintf (stderr, " FD_SETSIZE Limit: %d\n", FD_SETSIZE); break; caseEVPOLL: fprintf (stderr, " Poll FD Count: %d\n", pollfdmax); break;#ifdef_WIN32caseEVIOCP: fprintf (stderr, " IOCP Handle: %p\n", iocp_handle); fprintf (stderr, " Registered Sockets: %d\n", socket_registered); break;#endif } }/* 运行时诊断接口 */voidev_backend_diagnose (EV_P) {#ifEV_DEBUGdump_backend_status (EV_A); verify_backend_consistency (EV_A);#endif}
8. 最佳实践与使用建议
8.1 后端选择策略
/* 1. 自动后端选择 */voidconfigure_automatic_backend (EV_P) { /* 根据系统特性和负载自动选择最优后端 */if (running_on_linux () &&kernel_version () >= KERNEL_2_6) { backend=EVPOLL; /* 优先使用epoll */ } elseif (running_on_bsd ()) { backend=EVKQUEUE; /* BSD系统使用kqueue */ } else { /* fallback策略 */backend=detect_best_available_backend (); } }/* 2. 手动后端指定 */voidconfigure_specific_backend (EV_P_intdesired_backend) { /* 强制使用指定后端 */if (backend_supported (desired_backend)) { backend=desired_backend; initialize_selected_backend (EV_A_0); } else { /* 指定后端不可用,使用默认选择 */choose_best_backend (EV_A); } }
8.2 性能调优建议
/* 1. 高性能场景优化 */voidoptimize_for_high_performance (EV_P) { /* 增大内部缓冲区 */if (backend==EVSELECT) { /* select场景下增大fd集合大小 */select_reserve_fds (EV_A_8192); } elseif (backend==EVPOLL) { /* poll场景下预分配更大数组 */poll_preallocate_arrays (EV_A_4096); } }/* 2. 内存敏感场景 */voidoptimize_for_memory_efficiency (EV_P) { /* 使用更节省内存的数据结构 */if (backend==EVSELECT) { /* 使用压缩的fd位图 */select_enable_bitmap_mode (EV_A); } elseif (backend==EVPOLL) { /* 使用稀疏数组 */poll_enable_sparse_arrays (EV_A); } }/* 3. 兼容性优先场景 */voidoptimize_for_maximum_compatibility (EV_P) { /* 选择最广泛支持的后端 */backend=EVSELECT; /* select具有最好的兼容性 */select_init (EV_A_0); /* 启用兼容性模式 */select_enable_legacy_mode (EV_A); }
分析版本: v1.0源码版本: libev 4.33更新时间: 2026年3月1日
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx