夜雨聆风
夜雨聆风





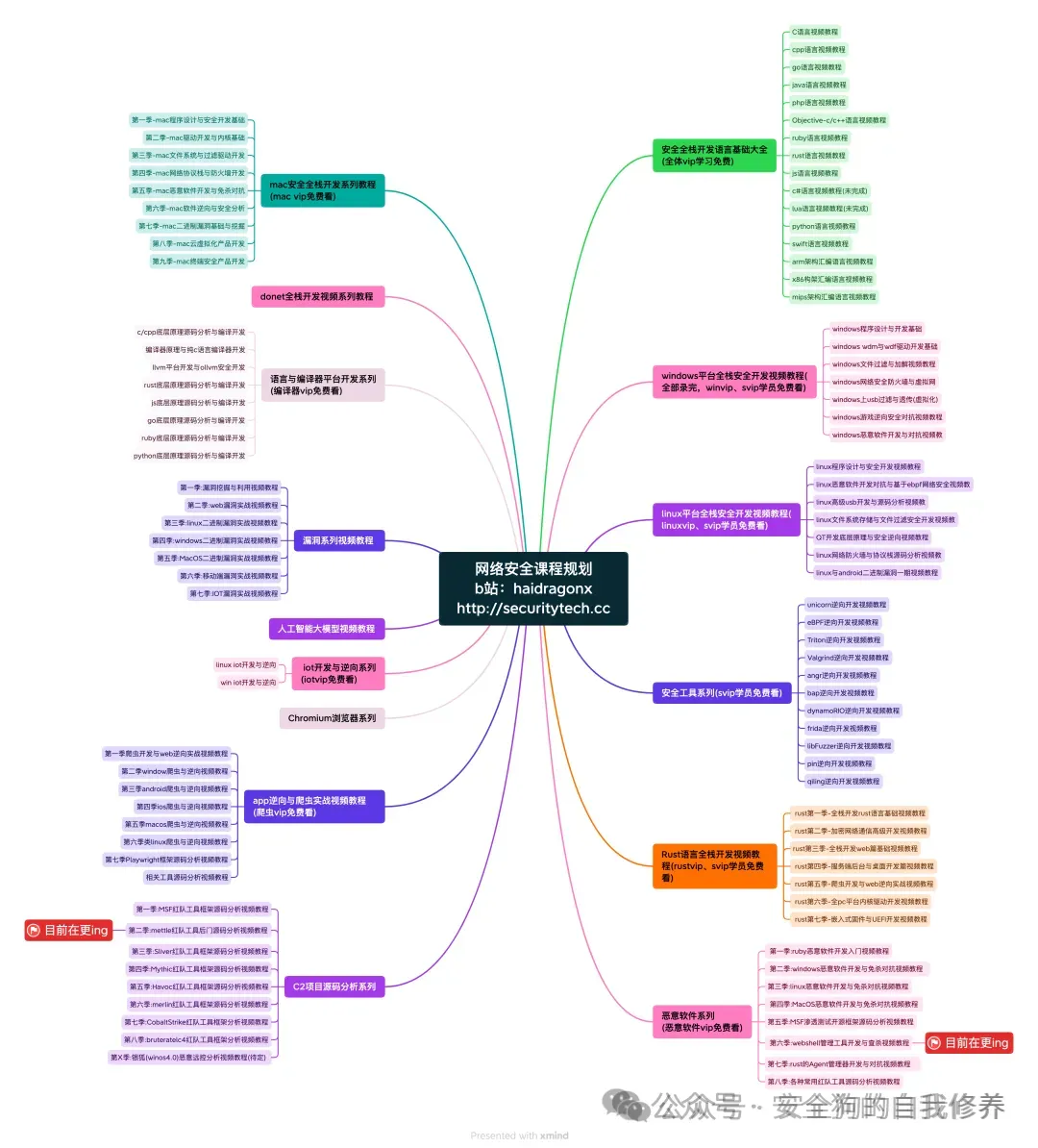
libev库源码分析系列教程(十三)
源码分析mettle后门工具学习 所使用的依赖库
官网:http://securitytech.cc
libev 回调触发流程追踪深度分析
1. 回调机制整体架构
1.1 设计理念
libev采用分层回调触发机制,通过事件就绪→pending队列→优先级调度→回调执行的流水线处理,确保事件能够按照预定的优先级和顺序得到处理,同时提供灵活的回调扩展机制。
1.2 核心回调数据结构
/* ev.h - 回调相关定义 */typedefvoid (*ev_callback)(EV_P_ev_watcher*w, intrevents);/* watcher回调字段 */#defineev_cb(w) ((w)->cb)/* 回调执行包装 */#defineev_invoke(EV_A_w, rev) \ (ev_cb((ev_watcher *)(w)))(EV_A_ (ev_watcher *)(w), (rev))/* 回调状态管理 */VAR(int, invoke_depth, , , 0) /* 回调调用深度 */VAR(int, pendingpri, , , NUMPRI) /* 当前处理优先级 */VAR(unsigned int, invoke_calls, , , 0) /* 回调调用总计数 */
2. 事件就绪到回调的完整流程
2.1 事件就绪检测流程
/* ev.c - 事件就绪检测主流程 */staticvoiddetect_ready_events (EV_P) { /* 1. 执行backend轮询 */backend_poll (EV_A_block_expiry (EV_A)); /* 2. 处理定时器到期 */timers_reify (EV_A); /* 3. 处理信号事件 */signals_process (EV_A); /* 4. 处理异步事件 */asyncs_process (EV_A); /* 5. 处理prepare watcher */prepares_invoke (EV_A); }/* backend轮询后的事件分发 */staticvoidbackend_event_dispatch (EV_P_intfd, intrevents) { /* 根据事件类型分发到相应处理函数 */if (revents& (EV_READ | EV_WRITE)) fd_event (EV_A_fd, revents); elseif (revents&EV_SIGNAL) ev_feed_signal_event (EV_A_fd); elseif (revents&EV_TIMER) timers_reify (EV_A); }
2.2 Pending队列处理流程
/* ev.c - pending事件处理主流程 */staticvoidprocess_pending_events (EV_P) { pendingpri=NUMPRI; /* 重置优先级 *//* 按优先级从高到低处理 */while (pendingpri) /* 从最高优先级开始 */ { --pendingpri; /* 处理当前优先级的所有pending事件 */while (pendingcnt[pendingpri]) { ANPENDING*p=pendings[pendingpri]; /* 移除pending状态 */ev_watcher*w=p->w; w->pending=0; array_del (pendings[pendingpri], p); --pendingcnt[pendingpri]; /* 执行回调 */invoke_watcher_callback (EV_A_w, p->events); } } }/* 回调执行核心函数 */staticvoidinvoke_watcher_callback (EV_P_ev_watcher*w, intrevents) { /* 增加调用深度 */++invoke_depth; /* 执行用户回调 */ev_invoke (EV_A_w, revents); /* 减少调用深度 */--invoke_depth; /* 统计回调调用 */#ifEV_STATS++invoke_calls;#endifEV_FREQUENT_CHECK; }
3. 不同类型Watcher的回调流程
3.1 IO事件回调流程
/* ev.c - IO事件回调触发流程 */staticvoidfd_event_callback_flow (EV_P_intfd, intrevents) { ev_io*w; /* 1. 遍历该fd上的所有watcher */for (w= (ev_io*)anfds[fd].head; w; w= (ev_io*)((ev_watcher*)w)->next) { /* 2. 检查事件匹配 */if (ecb_expect_true (w->events&revents)) { /* 3. 设置pending状态 */set_pending_with_priority (EV_A_ (ev_watcher*)w, revents); } } }/* IO watcher回调执行 */staticvoidev_io_callback_executor (EV_P_ev_io*w, intrevents) { /* IO事件特定处理 */intio_revents=revents& (EV_READ | EV_WRITE | EV_ERROR); /* 执行用户定义的回调 */if (ev_cb (w)) ev_cb (w) (EV_A_w, io_revents); /* 处理错误状态 */if (revents&EV_ERROR) handle_io_error (EV_A_w, revents); }
3.2 定时器回调流程
/* ev.c - 定时器回调触发流程 */staticvoidtimer_callback_flow (EV_P_ev_timer*w, ev_tstampnow) { /* 1. 检查定时器是否到期 */if (ev_at (w) <= now) { /* 2. 设置pending状态 */set_pending_with_priority (EV_A_ (ev_watcher*)w, EV_TIMER); /* 3. 处理周期性定时器 */if (ecb_expect_false (w->repeat)) { /* 重新计算下次触发时间 */ev_tstampnext_at=ev_at (w) +w->repeat; /* 避免时间累积误差 */if (next_at<now) next_at=now+w->repeat; ev_at (w) =next_at; /* 重新插入时间堆 */timer_heap_reinsert (EV_A_w); } } }/* 定时器回调执行 */staticvoidev_timer_callback_executor (EV_P_ev_timer*w, intrevents) { /* 执行用户回调 */if (ev_cb (w)) ev_cb (w) (EV_A_w, revents); /* 一次性定时器自动停止 */if (ecb_expect_false (!w->repeat)) ev_timer_stop (EV_A_w); }
3.3 信号回调流程
/* ev.c - 信号回调触发流程 */staticvoidsignal_callback_flow (EV_P_intsignum) { ev_signal*w; /* 1. 查找监听该信号的watcher */for (w=signals[signum-1]; w; w= (ev_signal*)((ev_watcher*)w)->next) { /* 2. 检查回调有效性 */if (ecb_expect_false (ev_cb (w) ==SIG_IGN||ev_cb (w) ==SIG_DFL)) continue; /* 3. 设置pending状态 */set_pending_with_priority (EV_A_ (ev_watcher*)w, EV_SIGNAL); } }/* 信号回调执行 */staticvoidev_signal_callback_executor (EV_P_ev_signal*w, intrevents) { /* 执行用户回调 */if (ev_cb (w)) ev_cb (w) (EV_A_w, revents); /* 处理一次性信号 */if (ecb_expect_false (w->repeat==0)) ev_signal_stop (EV_A_w); }
4. 回调执行的优先级调度
4.1 优先级感知的回调执行
/* ev.c - 优先级感知的回调调度 */staticvoidpriority_aware_callback_invocation (EV_P_ev_watcher*w, intrevents) { intpriority=ABSPRI (w); /* 高优先级事件立即执行 */if (ecb_expect_true (priority==HIGH_PRI)) { immediate_callback_execution (EV_A_w, revents); } /* 紧急情况下的优先级提升 */elseif (ecb_expect_false (needs_immediate_attention (revents))) { temporary_priority_boost (EV_A_w); immediate_callback_execution (EV_A_w, revents); restore_original_priority (EV_A_w); } /* 普通优先级事件加入pending队列 */else { set_pending_with_priority (EV_A_w, revents); } }/* 立即回调执行 */staticvoidimmediate_callback_execution (EV_P_ev_watcher*w, intrevents) { /* 直接执行回调,绕过pending队列 */++invoke_depth; ev_invoke (EV_A_w, revents); --invoke_depth; #ifEV_STATS++immediate_invoke_calls;#endif}
4.2 批量回调优化
/* ev.c - 批量回调执行优化 */staticvoidbatch_callback_execution (EV_P_ev_watcher**watchers, intcount, intrevents) { /* 按优先级分组 */ev_watcher*priority_groups[NUMPRI][256]; intgroup_counts[NUMPRI] = {0}; /* 分类到不同优先级组 */for (inti=0; i<count; ++i) { intpri=ABSPRI (watchers[i]); priority_groups[pri][group_counts[pri]++] =watchers[i]; } /* 按优先级顺序执行 */for (intpri=0; pri<NUMPRI; ++pri) { for (inti=0; i<group_counts[pri]; ++i) { ev_invoke (EV_A_priority_groups[pri][i], revents); } } }/* 回调合并执行 */staticvoidmerged_callback_execution (EV_P_ev_watcher*w, intrevents) { /* 合并同一watcher的多次事件 */if (w->pending) { /* 合并事件类型 */merge_pending_events (EV_A_w, revents); return; } /* 正常执行回调 */ev_invoke (EV_A_w, revents); }
5. 回调安全性与异常处理
5.1 回调执行安全机制
/* ev.c - 回调安全执行框架 */staticvoidsafe_callback_execution (EV_P_ev_watcher*w, intrevents) { /* 保存当前状态 */intold_invoke_depth=invoke_depth; ev_watcher*old_current_watcher=current_watcher; /* 设置执行环境 */current_watcher=w; ++invoke_depth; /* 执行回调 */if (ecb_expect_true (ev_cb (w) !=0)) { ev_cb (w) (EV_A_w, revents); } /* 恢复状态 */current_watcher=old_current_watcher; --invoke_depth; /* 检查执行深度 */if (ecb_expect_false (invoke_depth!=old_invoke_depth-1)) { /* 回调执行异常 */handle_callback_exception (EV_A_w); } }/* 嵌套回调检测 */staticvoiddetect_nested_callbacks (EV_P_ev_watcher*w) { if (ecb_expect_false (invoke_depth>MAX_CALLBACK_DEPTH)) { /* 回调嵌套过深 */fprintf (stderr, "Callback nesting too deep for watcher %p\n", w); ev_break (EV_A_EVBREAK_ALL); } }
5.2 异常回调处理
/* ev.c - 异常回调处理机制 */staticjmp_bufcallback_exception_jmp;staticintcallback_exception_occurred=0;/* 回调异常保护包装 */staticvoidprotected_callback_execution (EV_P_ev_watcher*w, intrevents) { if (setjmp (callback_exception_jmp) ==0) { /* 正常执行回调 */safe_callback_execution (EV_A_w, revents); } else { /* 回调抛出异常 */handle_callback_thrown_exception (EV_A_w, revents); } }/* 异常抛出接口 */voidev_throw_callback_exception (EV_P) { if (callback_exception_occurred) longjmp (callback_exception_jmp, 1); }/* 异常处理函数 */staticvoidhandle_callback_thrown_exception (EV_P_ev_watcher*w, intrevents) { /* 记录异常信息 */fprintf (stderr, "Exception thrown in callback for watcher %p\n", w); /* 清理异常状态 */callback_exception_occurred=0; /* 可选: 停止有问题的watcher */if (ev_is_active (w)) ev_stop (EV_A_w); /* 继续事件循环 */}
6. 回调性能监控与优化
6.1 回调执行时间监控
#ifEV_STATS/* ev.c - 回调性能统计 */VAR(unsigned long, callback_execution_count, , , 0)VAR(ev_tstamp, callback_total_execution_time, , , 0.)VAR(ev_tstamp, callback_max_execution_time, , , 0.)VAR(unsigned long, slow_callback_count, , , 0)/* 回调执行时间阈值 */#defineSLOW_CALLBACK_THRESHOLD 0.01 /* 10ms */#endif/* 性能监控回调执行 */staticvoidmonitored_callback_execution (EV_P_ev_watcher*w, intrevents) {#ifEV_STATSev_tstampstart_time=ev_time ();#endif/* 执行回调 */ev_invoke (EV_A_w, revents);#ifEV_STATSev_tstampexecution_time=ev_time () -start_time; callback_total_execution_time+=execution_time; ++callback_execution_count; /* 记录最大执行时间 */if (execution_time>callback_max_execution_time) callback_max_execution_time=execution_time; /* 统计慢速回调 */if (execution_time>SLOW_CALLBACK_THRESHOLD) { ++slow_callback_count; if (slow_callback_count % 100==0) /* 每100次报告一次 */ { fprintf (stderr, "Slow callback warning: %.3fms for watcher %p\n", execution_time*1000, w); } }#endif}
6.2 回调执行优化技术
/* ev.c - 回调执行优化 */staticvoidoptimized_callback_dispatch (EV_P_ev_watcher*w, intrevents) { /* 使用函数指针数组优化常见回调类型 */staticvoid (*callback_handlers[])(EV_P_ev_watcher*, int) = { [EV_IO] =ev_io_callback_executor, [EV_TIMER] =ev_timer_callback_executor, [EV_SIGNAL] =ev_signal_callback_executor, [EV_CHILD] =ev_child_callback_executor, [EV_STAT] =ev_stat_callback_executor }; inttype=ev_type (w); /* 直接调用优化的处理函数 */if (ecb_expect_true (type<sizeof(callback_handlers)/sizeof(callback_handlers[0]) &&callback_handlers[type])) { callback_handlers[type] (EV_A_w, revents); } else { /* fallback到通用处理 */generic_callback_executor (EV_A_w, revents); } }/* 内联优化的小回调 */staticinlinevoidfast_inline_callback (EV_P_ev_watcher*w, intrevents) { /* 对于简单回调进行内联优化 */if (ecb_expect_true (revents&EV_CUSTOM)) { /* 自定义事件快速处理 */handle_custom_event (EV_A_w); return; } /* 正常回调执行 */ev_invoke (EV_A_w, revents); }
7. 回调调试与追踪机制
7.1 回调执行追踪
#ifEV_DEBUG/* ev.c - 回调执行追踪 */VAR(unsigned long, callback_trace_id, , , 0)VAR(structcallback_trace_entry, callback_trace_buffer, [1024], , 0)VAR(int, callback_trace_index, , , 0)structcallback_trace_entry{ unsigned longid; ev_watcher*watcher; intrevents; ev_tstamptimestamp; constchar*caller_function; intcaller_line; };/* 回调追踪包装 */#defineTRACE_CALLBACK(w, rev) \ trace_callback_execution (__FUNCTION__, __LINE__, EV_A_ (w), (rev))staticvoidtrace_callback_execution (constchar*func, intline, EV_P_ev_watcher*w, intrevents) { structcallback_trace_entry*entry=&callback_trace_buffer[callback_trace_index]; entry->id=++callback_trace_id; entry->watcher=w; entry->revents=revents; entry->timestamp=ev_time (); entry->caller_function=func; entry->caller_line=line; callback_trace_index= (callback_trace_index+1) % 1024; /* 执行实际回调 */ev_invoke (EV_A_w, revents); }/* 回调追踪信息打印 */voidev_dump_callback_trace (EV_P) { fprintf (stderr, "Callback Execution Trace:\n"); intstart=callback_trace_index; for (inti=0; i<1024; ++i) { intidx= (start+i) % 1024; structcallback_trace_entry*entry=&callback_trace_buffer[idx]; if (entry->id>0) { fprintf (stderr, "[%lu] %s:%d - watcher %p, events 0x%x, time %.6f\n", entry->id, entry->caller_function, entry->caller_line, entry->watcher, entry->revents, entry->timestamp); } } }#endif
7.2 回调堆栈分析
#ifEV_DEBUG_TRACE/* ev.c - 回调堆栈跟踪 */staticvoidanalyze_callback_stack (EV_P) { /* 分析当前回调调用堆栈 */fprintf (stderr, "Callback stack analysis (depth: %d):\n", invoke_depth); ev_watcher*current=current_watcher; intdepth=0; while (current&&depth<10) /* 限制跟踪深度 */ { fprintf (stderr, " [%d] watcher %p, type %d, priority %d\n", depth, current, ev_type (current), current->priority); current=current->data; /* 假设data字段保存调用链信息 */++depth; } if (depth >= 10) fprintf (stderr, " ... (truncated)\n"); }/* 回调入口跟踪 */staticvoidcallback_entry_trace (EV_P_ev_watcher*w, intrevents) { fprintf (stderr, "Entering callback: watcher %p, events 0x%x\n", w, revents); analyze_callback_stack (EV_A); ev_invoke (EV_A_w, revents); fprintf (stderr, "Exiting callback: watcher %p\n", w); }#endif
8. 回调扩展与定制机制
8.1 回调拦截机制
/* ev.c - 回调拦截框架 */typedefstruct{ ev_callbackoriginal_callback; ev_callbackinterceptor; void*interceptor_data; } callback_interceptor_t;VAR(callback_interceptor_t*, callback_interceptors, , , 0)VAR(int, interceptor_count, , , 0)/* 注册回调拦截器 */voidev_register_callback_interceptor (EV_P_ev_watcher*w, ev_callbackinterceptor, void*interceptor_data) { /* 扩展拦截器数组 */if (interceptor_count >= interceptor_capacity) { interceptor_capacity=interceptor_capacity ? interceptor_capacity*2 : 16; callback_interceptors=ev_realloc (callback_interceptors, sizeof(callback_interceptor_t) *interceptor_capacity); } /* 保存原始回调 */callback_interceptors[interceptor_count].original_callback=ev_cb (w); callback_interceptors[interceptor_count].interceptor=interceptor; callback_interceptors[interceptor_count].interceptor_data=interceptor_data; /* 替换watcher回调 */ev_cb (w) =intercepted_callback_wrapper; ++interceptor_count; }/* 拦截器包装函数 */staticvoidintercepted_callback_wrapper (EV_P_ev_watcher*w, intrevents) { /* 查找对应的拦截器 */for (inti=0; i<interceptor_count; ++i) { if (callback_interceptors[i].original_callback==ev_cb (w)) { /* 执行拦截器 */callback_interceptors[i].interceptor (EV_A_w, revents, callback_interceptors[i].interceptor_data); return; } } /* fallback到原始回调 */ev_invoke (EV_A_w, revents); }
8.2 异步回调机制
/* ev.c - 异步回调支持 */typedefstruct{ ev_watcher*watcher; intrevents; ev_asyncasync_watcher; } async_callback_request_t;staticvoidasync_callback_handler (EV_P_ev_async*w, intrevents) { async_callback_request_t*req= (async_callback_request_t*)w->data; /* 在主线程中执行回调 */ev_invoke (EV_A_req->watcher, req->revents); /* 清理请求 */ev_free (req); }/* 异步回调触发 */voidev_invoke_async_callback (EV_P_ev_watcher*w, intrevents) { /* 创建异步请求 */async_callback_request_t*req=ev_malloc (sizeof(async_callback_request_t)); req->watcher=w; req->revents=revents; /* 初始化异步watcher */ev_async_init (&req->async_watcher, async_callback_handler); req->async_watcher.data=req; /* 在目标线程中触发 */ev_async_send (target_loop, &req->async_watcher); }
9. 最佳实践与使用建议
9.1 回调设计原则
/* 1. 高效回调设计 */voidefficient_callback_design (EV_P_ev_watcher*w, intrevents) { /* 原则1: 保持回调函数简洁 */if (revents&EV_READ) { /* 快速处理读事件 */handle_read_event_quickly (w); return; /* 尽早返回 */ } /* 原则2: 避免在回调中执行耗时操作 */if (needs_heavy_processing (revents)) { /* 将重任务推迟到后续处理 */schedule_heavy_task_for_later (w, revents); return; } /* 原则3: 正确处理错误状态 */if (revents&EV_ERROR) { handle_error_and_cleanup (w); return; } }/* 2. 回调错误处理模式 */voidrobust_callback_error_handling (EV_P_ev_watcher*w, intrevents) { /* 使用防御性编程 */if (!w|| !ev_cb (w)) return; /* 保存关键状态 */intsaved_errno=errno; sig_atomic_tsaved_sigatomic=sig_atomic; /* 执行回调 */ev_cb (w) (EV_A_w, revents); /* 恢复状态 */errno=saved_errno; sig_atomic=saved_sigatomic; }
9.2 性能优化建议
/* 1. 回调批处理优化 */voidoptimize_callback_batching (EV_P) { /* 合并相似的事件处理 */if (pendingcnt[HIGH_PRI] >CALLBACK_BATCH_THRESHOLD) { /* 使用批处理模式 */batch_process_high_priority_callbacks (EV_A); } /* 预取优化 */prefetch_next_callbacks (EV_A); }/* 2. 内存友好的回调设计 */voidmemory_efficient_callback_design (EV_P_ev_watcher*w, intrevents) { /* 避免在回调中频繁分配内存 */staticcharbuffer[4096]; /* 静态缓冲区 *//* 重用对象 */staticstructreusable_objects_poolpool; structwork_item*item=get_reusable_object (&pool); /* 执行工作 */process_work_item (item, w, revents); /* 归还对象到池 */return_reusable_object (&pool, item); }/* 3. 回调监控配置 */voidsetup_callback_monitoring (EV_P) { /* 启用性能监控 */#ifEV_STATSev_set_invoke_threshold (EV_A_0.005); /* 5ms阈值 */#endif/* 配置调试跟踪 */#ifEV_DEBUGev_enable_callback_tracing (EV_A_1); /* 启用跟踪 */#endif/* 设置异常处理 */ev_set_exception_handler (EV_A_global_exception_handler); }
分析版本: v1.0源码版本: libev 4.33更新时间: 2026年3月1日
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx