 夜雨聆风
夜雨聆风





点绕任意点旋转坐标公式推导文档
在单相机取料和单相机放料的应用场景中,需要经常使用到坐标旋转公式计算点绕某点旋转后的点坐标。下面将对坐标旋转公式进行简单的解析。
基础定义
-
• 旋转中心点坐标: -
• 待旋转点原始坐标: -
• 旋转角度:(逆时针为正,顺时针为负,单位:弧度) -
• 旋转后目标点坐标:
核心前置知识
一般在机器视觉中,求取旋转后的点的坐标按照以下步骤进行:
-
• 先将笛卡尔坐标系原点和旋转中心点坐标进行对齐; -
• 再按照旋转中心求取旋转指定角度后的点的坐标(旋转后点的坐标是以旋转中心为原点的坐标系中的点) -
• 求取旋转后的坐标在平移转换到原来的坐标系中
坐标系平移规则
将点相对于旋转中心平移至坐标原点:
平移还原(从原点恢复至原坐标系):
点绕原点旋转公式
点
绕坐标原点旋转后的坐标公式来源:三角函数和角公式
完整推导过程
平移坐标系__将旋转中心移至原点
把旋转中心
临时变为原点,待旋转点转换为相对坐标:
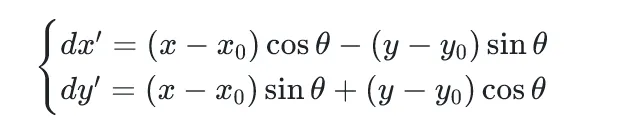
执行原点旋转运算
代入原点旋转公式,计算相对坐标旋转后的结果:
还原坐标系——平移回原位置
将旋转后的坐标加回旋转中心,得到最终绝对坐标:

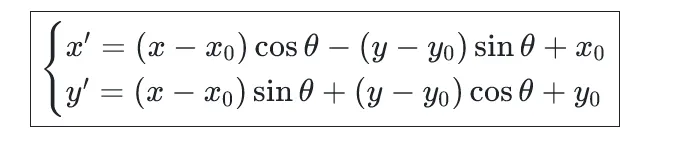
合并得到最终公式
将步骤2代入步骤3,整理后:
推导核心逻辑总结
绕任意点旋转 = 三步标准变换
-
1. 平移:把旋转中心移到原点,得到相对坐标 -
2. 旋转:使用原点旋转公式计算 -
3. 反平移:加回中心坐标,恢复原坐标系
注意
-
1. 角度单位:公式中为弧度,角度制需转换: -
2. 适用场景:视觉标定、XYR平台旋转补偿、机器人取料姿态计算等。
