 夜雨聆风
夜雨聆风





一个小插件可以将吉利标准中Tool Base转换为系统Tool Base
机器人技术交流及二次开发,关注可点击公众号。本公众号提供一个机器人应用技术交流平台,目前支持主流的KUKA,ABB以及UR机器人,详细请后台留言。





本文介绍一下关于一个小插件,将吉利标准中的tool,base自动转换成系统的Tool,Base
1,工具界面,可以选择定义工具以及BASE的dat文件
自动选中在文件中定义的工具,赋给系统的工具号
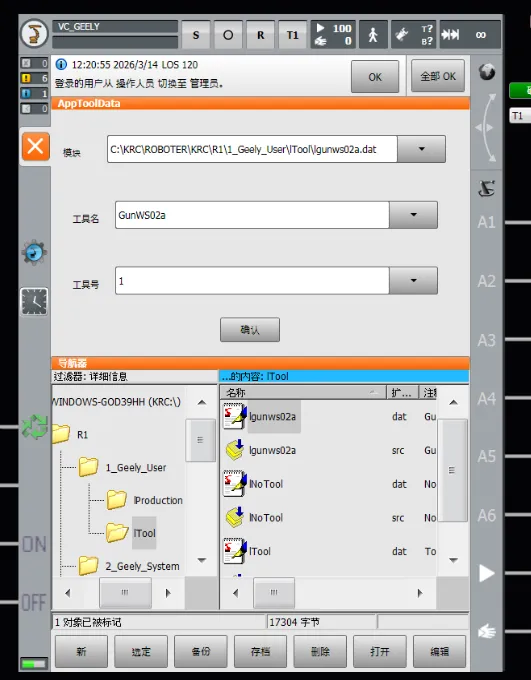
吉利模块中的定义
; Tool definition;---------------------------------------------------DECL GLOBAL ToolType GunWS02a={Toolid 1,Tcp {X 820.620,Y -58.2500,Z 474.090,A 73.1860,B 9.85000,C -100.151},ToolStand FALSE,External FALSE,TType #Gun,TLoad {M 147.164658,CM {X 69.4395065,Y -52.8355141,Z 261.289,A 178.193726,B -57.1647949,C 92.5860748},J {X 10.5478344,Y 11.0730772,Z 18.2538471}}}
系统定义: tool_data
DECL FRAME TOOL_DATA[16]TOOL_DATA[1]={X 820.620,Y -58.2500,Z 474.090,A 73.1860,B 9.85000,C -100.151}
load_data
DECL LOAD LOAD_DATA[16]LOAD_DATA[1]={M 147.164703,CM {X 69.4395065,Y -52.8355103,Z 261.289,A 178.193695,B -57.1647911,C 92.5860672},J {X 10.5478296,Y 11.0730801,Z 18.2538509}}
tool_name:
DECL CHAR TOOL_NAME[16,24]TOOL_NAME[1,]="GunWS02a "
2, BASE界面
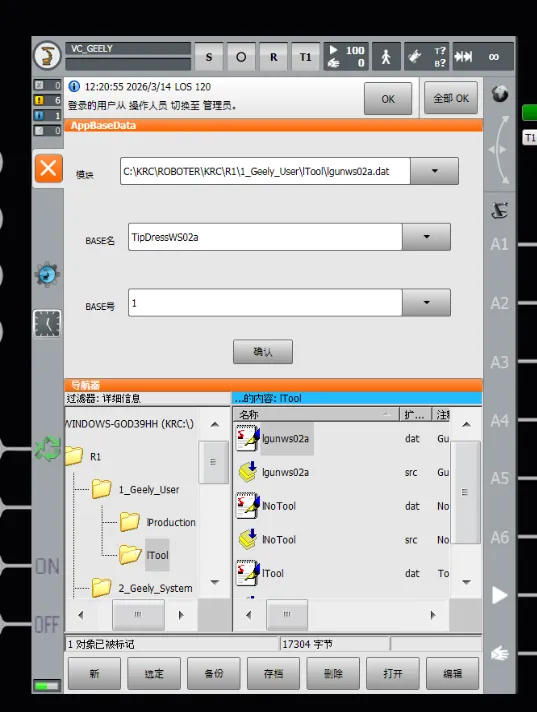
吉利标准定义的模块
Base_data:
;---------------------------------------------------; Base definition;---------------------------------------------------DECL GLOBAL PartDataType TipDressWS02a={PartFrame {X 1261.86,Y -815.590,Z 328.000,A -0.138000,B 0.0,C 0.0},PartRef #World,PartLoad {M 0.0,CM {X 68950.0625,Y -94944.2813,Z -700.000,A 0.0,B 0.0,C 0.0},J {X 0.0,Y 0.0,Z 0.0}}}
系统中的定义
Base_DATA:
DECL FRAME BASE_DATA[32]BASE_DATA[1]={X 1261.86,Y -815.590,Z 328.000,A -0.138000,B 0.0,C 0.0}
Base_name:
DECL CHAR BASE_NAME[32,24]BASE_NAME[1,]="TipDressWS02a "
https://pan.baidu.com/s/1nNqrmpkW7HhFutoy3V0U1g?pwd=r3eu
KUKA ModBusTCP
KUKA通用化Inlineform,可以不用UserTech了
ABB Event Routie功能在KUKA机器人中的接口实现-功能升级(基本全了)
四种KUKA机器人对话框显示方式
ABB滚边软件包标定方法在KUKA机器人端的移植
ABB Event Routie功能在KUKA机器人中的接口实现
介绍一个可以将KRL各种自定义参数实时写入文件的小插件
7 种KUKA HMI 设计方法
KUKA如何快速创建自己的用户程序模板
UserTech中Inlineform中开发运动指令中的一个关键小技巧
如何利用UserTech实现Inlineform中Tool,Base动态展示
KUKA快捷键小插件-UserMode
KUKA UserKeyBar动态配置插件-全应用场景
KUKA UserKeyBar动态配置C# -3 单个按钮完结篇
KUKA两种用户按钮的实现方法之一:UserTech
三种扩展KUKA系统输入输出方法
KUKA软件包打包安装条件定制化
ABB自己开发的插件中如何加入自动启动图片
KUKA软件包打包方法介绍
机器人各种停止时位置偏移测量
带授权的KUKA屏保插件–>独立进程
带授权的KUKA屏保
KUKA Obfuscator混淆与反混淆授权
KUKA加密软件升级
ABB版本的KDC–ABBDeviceConnector
实现KUKA机器人UDP报文数据采集发送
实现KUKA机器人屏幕截屏功能
实现KUKA机器人系统变量可视化展示
实现优傲机器人实时数据界面展示
ABB机器人实现节拍分段计算以及节拍数据本地存储
KUKA机器人KRL语言Input功能实现
点击文末的“阅读全文”可以下载相应的软件