 夜雨聆风
夜雨聆风





PNAS | 微尺度运输新工具:无需外部引导,活性液滴凭化学回声定位实现自主决策

期刊:PNAS (IF=9.1)
发表日期:2026年1月29日
原文链接:https://doi.org/10.1073/pnas.2526773123
能够自主移动的微生物(如细菌和藻类)在微米尺度上统一了自我推进、自主导航和决策等能力,而目前的合成微游动者虽然能够自我推进,但仍缺乏其生物对应物的功能和复杂性。具体来说,目前的合成微游动者尚缺乏在没有外部线索或引导的情况下自主做出导航决策和解决迷宫的能力。
美国宾夕法尼亚大学的研究者们开创了一种名为“化学回声定位”的机制,使合成智能体(如活性液滴)能够利用自身产生的化学信号远程感知环境并做出反应,从而在没有外部引导的情况下自主导航并解决复杂的迷宫问题。该机制通过化学-流体动力学信号的“回声”来识别死胡同并引导智能体走向出口,为微尺度自主导航提供了新策略。上述研究成果以”Automated decision-making by chemical echolocation in active droplets“为题,发表在《PNAS》期刊上。
✦
✦
研究创新点
✦
🔵提出了“化学回声定位”概念,证明合成智能体可以通过自身产生的化学-流体动力学信号的反射来感知障碍物,无需依赖出口处的化学源或外部控制即可自主导航。
🔵建立了理论模型并明确了化学回声定位生效的条件,即智能体的响应时间应短于回声时间尺度,且化学扩散系数需满足特定界限。
🔵实验验证了PEI/PSS液滴利用该机制在复杂迷宫中实现自主决策和货物输送,证明了该策略在微米至厘米尺度上的鲁棒性和有效性。
✦
✦
研究图文解析
✦
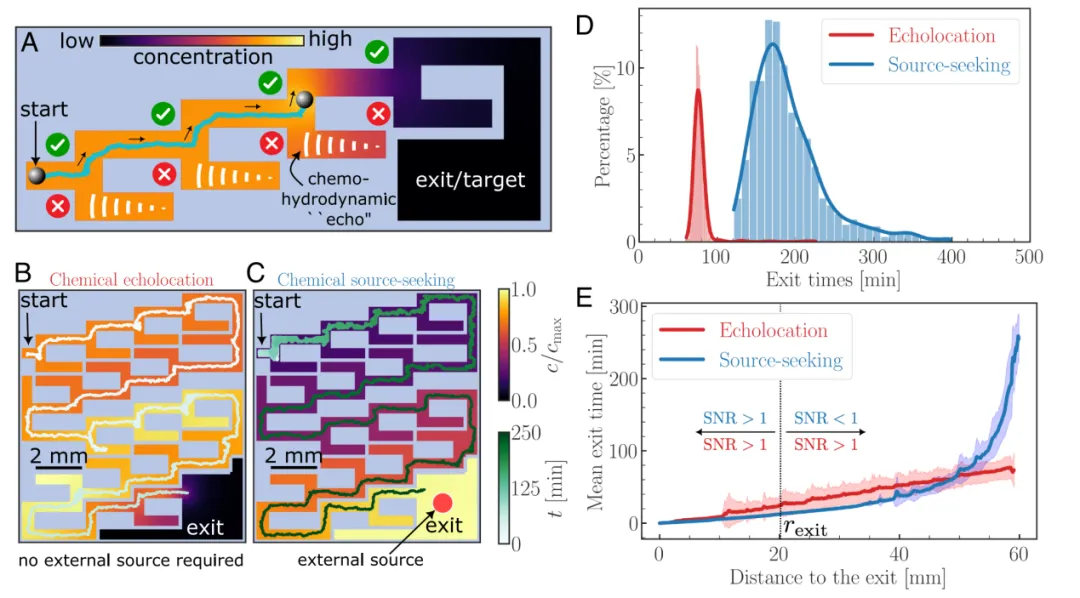
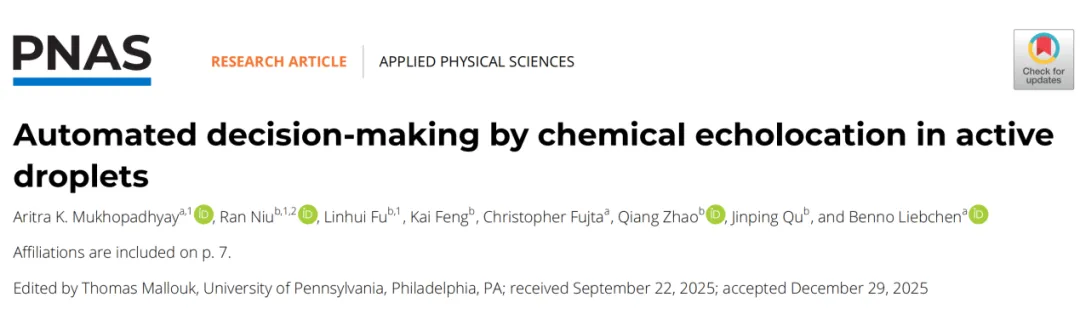
图1通过示意图、模拟轨迹、出口时间直方图和距离-时间关系图,对比了化学回声定位与传统化学源寻路策略的差异:回声定位策略无需外部源,轨迹更直接,出口时间更短且随距离线性增长,而源寻路策略在远距离时信噪比低于1,导航失效。
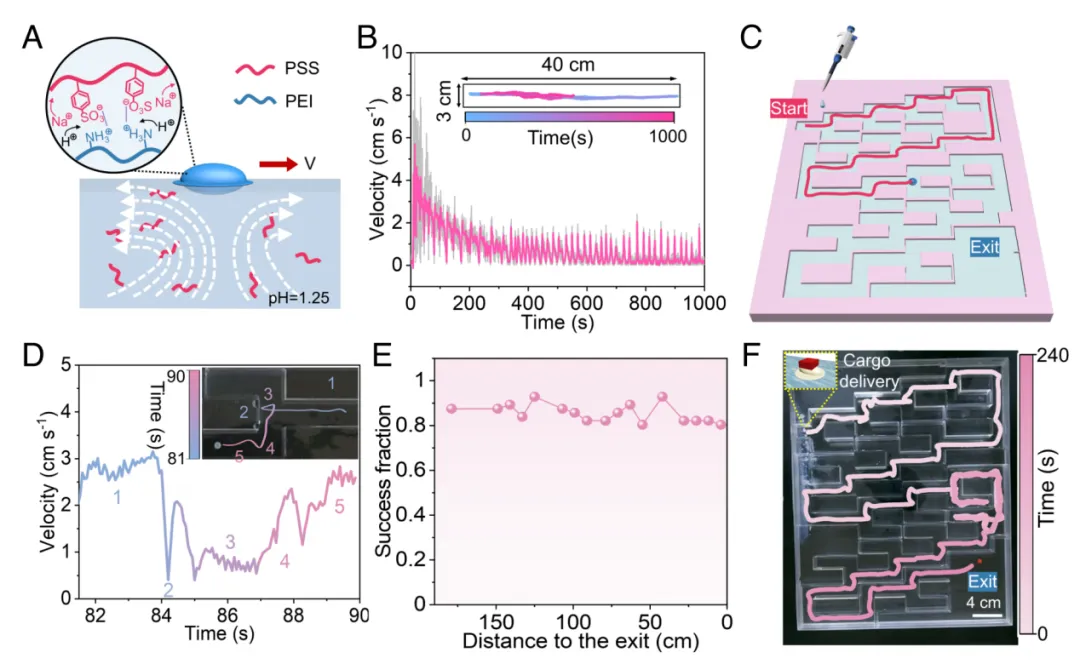
图2 展示了活性液滴的实验实现:包括液滴结构与自推进原理、受限通道中的运动速度与轨迹、大型迷宫导航示意图、连接处的速度变化与轨迹,以及不同 连接的决策成功率和货物运输演示,验证了液滴的自主导航与负载能力。
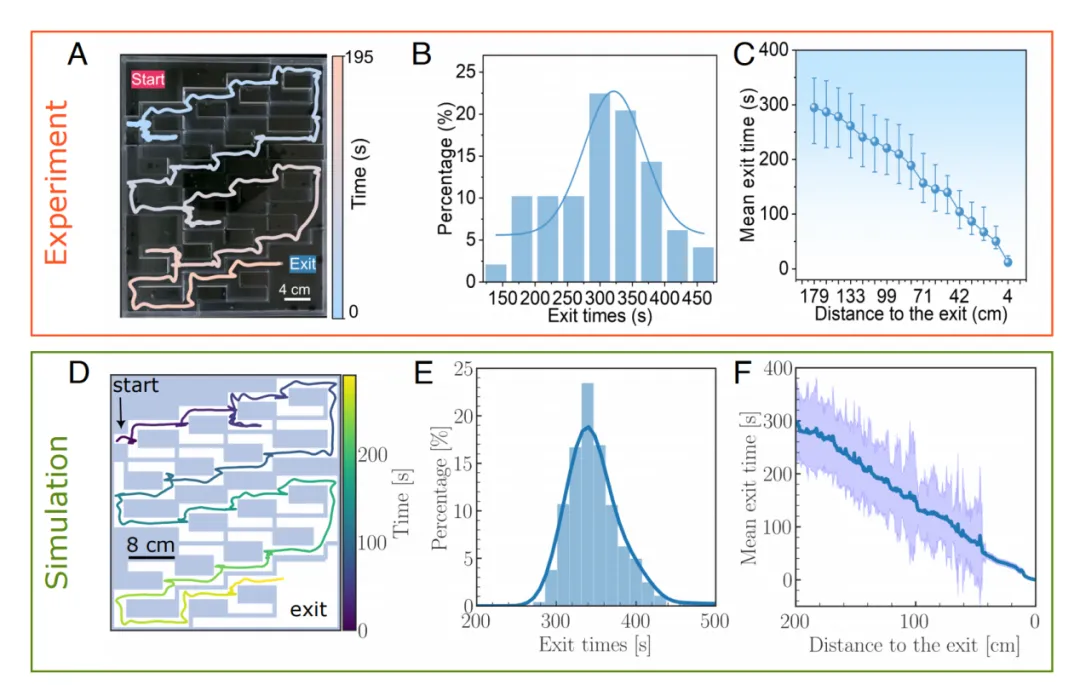
图3 通过实验与模拟的对比,包括典型轨迹、出口时间分布和距离-平均出口时间关系,证实了数值模型与实验结果的定量和定性一致性,凸显了机制的可靠性。
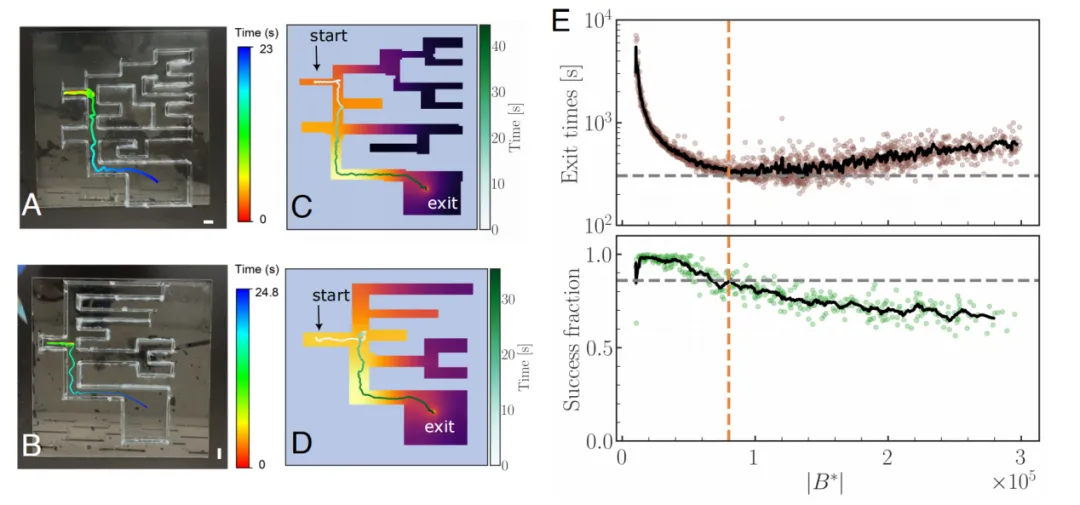
图4 通过复杂迷宫的实验与模拟轨迹、不同趋化敏感性参数下的出口时间和成功率曲线,验证了化学回声定位机制在复杂几何结构和参数变化下的鲁棒性,确定了最优趋化敏感性范围。
✦
✦
总结与展望
✦
本研究成功赋予了合成智能体自主导航和决策的能力,使其能够像生物体一样利用“化学回声”解决复杂环境问题,且无需外部引导。该机制在微型机器人和靶向药物输送等领域具有广泛应用前景,未来工作可进一步解析迷宫连接处的详细化学-流体动力学过程,并探索多智能体协同行为。
免责声明:
本文为科普类文章,旨在普及微流控领域相关知识、促进科学传播。
文中所使用的视频、图片、文字等素材,若涉及作品版权问题,请相关权利人及时与我们联系,我们将依法依规妥善处理。
此外,若文章内容存在错误,或与原期刊文章的观点、结论不一致,也欢迎随时告知我们,我们将第一时间进行修改、删除等处理。
同时,热忱欢迎微流控领域科研工作者、科普爱好者向我们投稿、荐稿,或洽谈合作事宜,共同助力微流控学术和产业化发展。


