 夜雨聆风
夜雨聆风





庖丁解车Ⅱ:3️⃣ 骨架进化:软件定义"肌肉记忆"的AI赋形
当我们谈论智能汽车的进化时,我们习惯于谈论芯片性能的提升、算法模型的增大、传感器数量的增加。这些都是智能汽车看得见的”大脑”和”神经”,但有一个维度却常常被我们忽略——那就是支撑这一切的”骨架”。
就像在生物体中,骨架不仅仅是支撑身体的坚硬结构,更是肌肉附着、运动协调、生长发育的基础。没有一个不断进化的骨架,再强大的大脑和神经也无法发挥作用。同样,在智能汽车中,”骨架”——也就是硬件与软件的连接架构、接口定义、资源分配机制——正在经历一场静悄悄的革命。
这场革命的核心是什么?传统汽车的骨架是”机械浇筑”出来的,一旦定型就终身不变。现代EEA架构下的骨架是”数字预制”的,通过标准化接口实现一定程度的灵活性。而在AI驱动的数字生命体中,骨架正在变成**”AI赋形”**的——软件不断学习,重新定义硬件的连接方式,整车逐渐形成属于自己的”肌肉记忆”,随着使用不断进化。
这就是我们今天要探讨的主题:软件如何重新定义智能汽车的”骨架”,AI又如何赋予这副骨架真正的”肌肉记忆”能力。
一、从机械骨架到数字骨架:被忽略的架构革命
要理解这场骨架进化,我们需要先回到起点:汽车的骨架从一开始就是什么样的?它经历了怎样的演变?
1.1 机械时代:钢铁浇筑的静态骨架
在传统燃油车时代,汽车的骨架毫无疑问是机械骨架。各个部件之间主要通过机械结构连接,一旦组装完成,连接方式、相对位置、功能分工就都固定下来了。
比如,发动机就是发动机,变速箱就是变速箱,它们之间通过传动轴和连杆物理连接。这种连接一旦完成,就不可能在使用过程中改变。你不能开着开着就让发动机突然变成发电机,也不能让变速箱改变传动比的物理实现方式。
这种机械骨架有它的好处:结构简单、可靠性高、成本可控。但缺点也同样明显:完全没有灵活性。任何功能变更都需要物理改装,升级几乎不可能。汽车卖出去是什么样,就一直是什么样。
这种静态性,在燃油车时代不是问题。因为用户买的就是一部”会跑的机器”,机器本来就是固定的。但进入智能电动时代,用户开始期待汽车像手机一样持续进化,机械骨架的局限性就越来越明显了。
1.2 EEA转型:开始出现数字韧带
当汽车进入电子电气时代,特别是分布式架构向域集中架构演进,我们开始看到数字骨架的雏形。
什么是数字骨架?简单说就是把原来很多分散的机械连接,替换成标准化的数字接口。比如,原来各个零部件都有自己专属的连接线和通信协议,现在统一换成以太网,用标准的SOME/IP协议进行通信。
这个转变的意义是什么?原来零部件之间的连接是”硬连接”,现在变成了”软连接”。功能不再完全绑定在物理硬件上,而是可以通过软件重新定义。
我把这个阶段称为”数字韧带”的出现。骨架还是那个骨架,但连接骨架各个部分的”韧带”从机械变成了数字。这给了骨架一定的柔韧性。
比如,现在的域控制器架构,车身域、座舱域、智驾域各自分离,通过以太网连接。如果座舱域需要更多算力,理论上可以通过软件调度,让智驾域在空闲的时候分享一些算力过来。虽然现在还没有真正实现,但架构上已经具备了这种可能性。
但是,我们也要清醒地认识到:现阶段大部分所谓的”软件定义汽车”,还停留在**”软件配置骨架”**的阶段。也就是说,骨架的形状和连接方式在工厂里就配置好了,出厂之后基本不变。OTA主要是更新算法和功能,很少触及骨架层面的改变。
就像搭积木,厂家在出厂前帮你把积木拼好了,你可以在这个基础上换一些积木块,但整体结构不变。真正的骨架进化,应该是积木的连接方式本身都可以在使用过程中不断改变。
1.3 AI时代:为什么骨架需要重新定义?
当AI开始深度进入汽车,特别是大模型和生成式AI技术上车后,我们发现现有的数字骨架还是不够用。为什么?
第一个原因:AI对算力的需求是动态波动的,而且波动非常大。
传统的EEA架构是”静态分区”的——座舱多少算力,智驾多少算力,都在设计阶段就分配好了。但AI大模型的算力需求完全不是这样。当你在用语音助手聊天时,需要的算力可能不小;当你在用大模型做导航规划时,需要的算力又不一样;当自动驾驶在高速巡航时,和在复杂城市场景下,算力需求也差很多。
如果按照峰值算力分配每个域,大部分时间算力都是浪费的。如果按照平均分配,高峰时候又不够用。怎么解决这个问题?需要骨架本身能够动态调整——哪个部分需要更多算力,骨架就自动把更多硬件资源连接过去。
第二个原因:AI带来了很多新的交互方式,这些方式无法预先定义。
比如,现在的人车交互,基本都是预先定义好的——你按哪个按钮,就触发哪个功能。但AI大模型带来了自然语言交互、手势交互、甚至情感交互,这些交互方式很多是使用中才会涌现出来的,无法在设计阶段就全部定义好接口。
骨架需要具备弹性——能够随着新交互方式的出现,自动调整硬件和软件的连接关系。
第三个原因:AI让汽车真的可以学习,学习的结果需要固化下来。
当汽车开始学习用户的驾驶习惯、使用偏好,这些学习的结果放在哪里?传统架构是把学习结果放在算法模型里,但如果这些习惯影响到了各个部件的协同方式呢?比如,用户经常在某个路段用某种方式加速,动力系统和底盘系统的协同就需要调整。
这种调整就是”肌肉记忆”——骨架本身记住了常用的姿势,下次再遇到类似情况,反应更快更自然。这种肌肉记忆不可能都由厂家预先做好,必须在使用过程中自主形成。
所以,我们需要一种全新的骨架——它不再是出厂就固定不变的,而是能够被软件不断重新定义,能够被AI不断塑形,能够在使用过程中形成自己的肌肉记忆。

这就是”软件定义肌肉记忆的AI赋形”。
二、什么是AI赋形的骨架?四个核心特征
理解了为什么需要骨架进化,我们接下来要问:AI赋形的骨架,到底是什么样的?它有哪些核心特征?
通过对国内外领先车企和芯片厂商架构设计的观察,我总结出AI赋形骨架的四个核心特征:
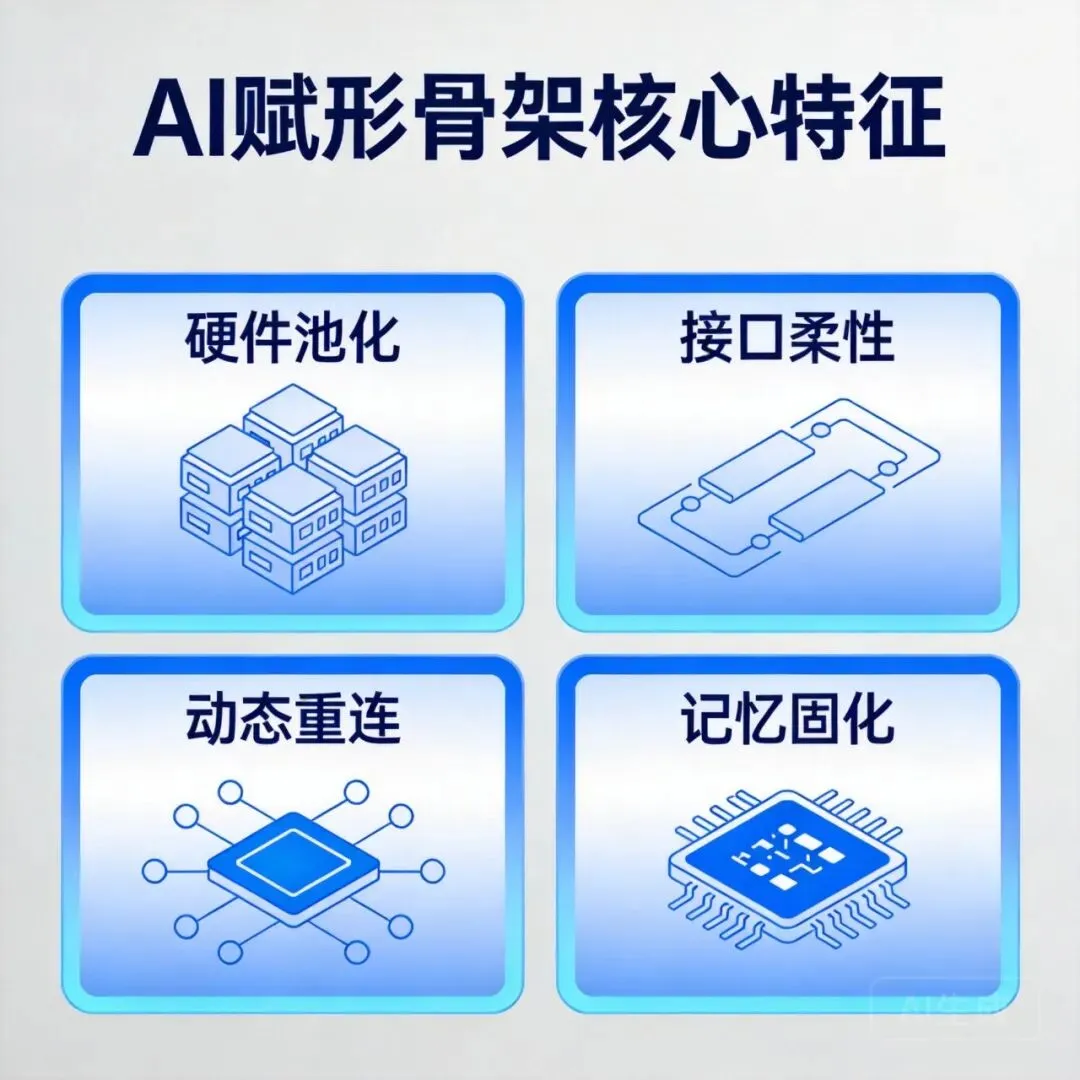
硬件池化、接口柔性、动态重连、记忆固化。我们一个个来看。
2.1 硬件池化:从”静态分区”到”资源池”
第一个也是最根本的改变,就是从”静态分区”走向硬件池化。
什么意思?传统域架构是”一个萝卜一个坑”——座舱域就是这个坑,放的就是座舱的萝卜;智驾域就是那个坑,放的就是智驾的萝卜。每个萝卜都有自己固定的位置,不能乱挪。
硬件池化就是把所有的计算资源、存储资源、I/O资源都放在一个大池子里,不预先分给某个具体的域。需要用的时候,动态分配;用完了,再收回去。
听起来很简单,但真正做起来非常难。难在哪里?
第一,延迟问题。智驾对延迟要求非常高,如果你动态分配算力,会不会因为调度带来额外延迟?这对调度算法和硬件互连都提出了很高要求。
第二,安全隔离问题。功能安全要求不同安全等级的功能必须隔离,不能互相影响。如果你把所有资源都池化了,怎么保证安全隔离?一个应用崩溃了,会不会影响整个系统?
第三,软件生态问题。现在的汽车软件都是按照域划分开发的,每个域有自己的操作系统和 middleware。如果变成资源池,整个软件开发方式都要变,生态迁移成本很高。
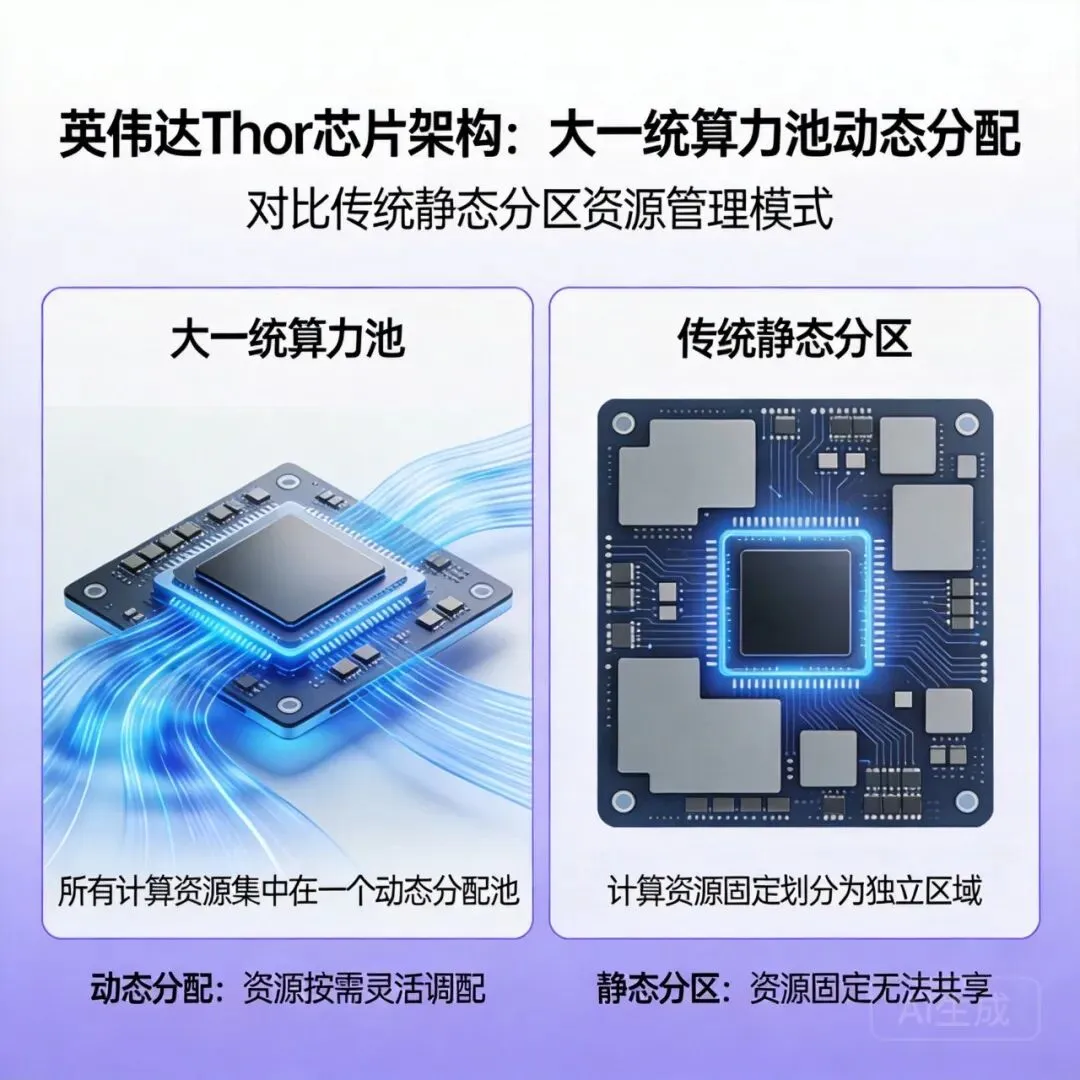
但是,难归难,方向是对的。我们已经看到一些厂商开始在这个方向探索。比如,英伟达的Thor芯片,就是把整个SoC做成一个大一统的计算资源池,支持硬件虚拟化,可以动态分配给不同功能。高通最新的FlexGen架构,也是朝着这个方向走。
国内的一些新势力车企,也在探索中央计算机+区域控制器的架构,本质上就是在向硬件池化方向演进。中央计算机掌握大部分算力资源,动态分配给不同任务。
未来,随着3nm、2nm工艺进步,芯片整合度越来越高,把多个域的计算核心放在同一个die上,会越来越经济。到那个时候,硬件池化就水到渠成了。
2.2 接口柔性:从”硬编码”到”语义化”
第二个核心特征是接口柔性。
传统的硬件接口都是”硬编码”的——这个地址对应哪个寄存器,这个ID对应哪个功能,都写死在代码里。要改接口,就得重新编译代码,OTA整个软件包。
柔性接口是什么样的?接口不再是硬编码的物理地址,而是语义化的服务描述。我需要一个”输出10kW动力”的服务,不管这个服务到底是哪个硬件提供的,只要能满足我的语义要求就行。
举个例子:你要调节空调温度,传统接口是”发送ID为0x123的CAN信号,数值代表温度”。柔性接口是”我要把座舱温度降到24度”,至于这个请求具体发给哪个控制器,走什么通信路径,由框架自动路由,不需要上层应用关心。
这样做的好处是什么?松耦合。硬件可以换,只要语义接口不变,上层软件不用改。比如,你换了一个空调控制器,只要它还提供”调节温度”的语义接口,上层的空调APP完全不用动。
更重要的是,AI可以理解语义,自动匹配接口。当一个新的AI应用需要某个硬件功能,它不需要知道具体的接口定义,只要用自然语言描述清楚它需要什么,框架就可以自动找到对应的服务,完成连接。这对于AI原生应用来说太重要了。
现在,SOA(面向服务的架构)思想在汽车EEA中已经普及了,但大部分厂商做的SOA还只是”静态SOA”——服务接口还是在设计阶段就定义好了,出厂之后不怎么变。真正的柔性接口需要的是**”动态SOA”**——服务可以在运行时注册、发现、注销,接口可以动态协商。
这才是真正的柔性。接口不再是骨架上固定的挂钩,而是可以根据需要自动长出新的挂钩。
2.3 动态重连:从”固定拓扑”到”按需重组”
第三个核心特征是动态重连。
传统架构的连接拓扑——也就是哪个部件和哪个部件连接,谁给谁发数据——基本是固定的。设计的时候画好拓扑图,生产出来就按照这个连。
动态重连意味着拓扑可以在运行时重新组合。根据当前任务的需要,自动建立最合适的连接;任务完成了,就可以断开连接,释放资源。
比如,现在你要用到自动驾驶的自动泊车功能。自动泊车需要环视摄像头的数据,需要雷达数据,需要计算路径,需要控制方向盘和刹车。在动态重连架构下,系统会自动把这些相关的硬件和软件模块连接起来,形成一条专门针对自动泊车的数据流路径。任务完成了,这些连接就可以解除,资源释放给其他任务。
听起来是不是有点像云计算里的”容器编排”和”服务网格”?没错,思路是一样的。云计算早就走过了从物理机到虚拟机到容器到Serverless的路,就是从静态分配走向动态调度。智能汽车的骨架进化,走的是同一条路。
动态重连带来最大的好处就是资源利用率提升。需要的时候组合,不用的时候解散,资源始终用在刀刃上。特别是对于AI这种算力需求波动很大的场景,收益特别明显。
但是,动态重连也带来新的挑战。最大的挑战就是一致性和可靠性。每次连接重组,会不会出现延迟抖动?会不会出现数据不一致?功能安全怎么保证?这些都是需要解决的问题。
目前来看,软件定义网络(SDN)的思想可以借鉴过来。用一个中央控制器来管理整个拓扑,全局决策,局部执行。既有全局的灵活性,又有局部的稳定性。
2.4 记忆固化:从”出厂定型”到”肌肉记忆自主形成”
第四个,也是最有AI特色的特征,就是记忆固化。
什么意思?就是常用的连接模式和资源分配方案,会被系统记住,固化下来,变成骨架的一部分。下次遇到同样的场景,直接用,不需要重新计算和调度。这就是”肌肉记忆”。
我们人类的肌肉记忆就是这样——刚开始学骑自行车,每个动作都需要大脑刻意控制,很慢很僵硬。练得多了,肌肉就记住了姿势,变成了条件反射,不用想就能做,又快又自然。
智能汽车的肌肉记忆也是这个道理。比如,你每天上班走同一条路线,走走停停,你的驾驶风格比较猛,经常急加速急刹车。系统会观察到这个模式,逐渐把动力系统、底盘控制系统、能量管理系统的协同参数调整到最适合你这个风格的状态,并且固化下来。下次你一开上这条路,系统自动切到这个模式,车辆的响应就是你习惯的样子。
再比如,你经常用语音助手控制空调和导航,系统会观察到这个习惯,把语音模块和空调控制、导航模块的连接优先级调高,响应延迟就会降低,用起来更流畅。
这就是AI赋形的精髓——骨架不是厂家给的,是用户用出来的。汽车用得越久,对用户越了解,骨架就越贴合用户的使用习惯,用起来就越顺手。
这个过程是持续终生的。只要汽车还在使用,骨架就在不断调整,不断形成新的肌肉记忆。汽车真的变成了一个会”学习”的生命体,而不是一台出厂就定型的机器。
三、AI如何”记住”肌肉记忆?底层机制解析
说了这么多概念,我们来看点更实在的:AI到底是怎么让骨架形成肌肉记忆的?这个过程在技术上是怎么实现的?底层机制是什么?
我把这个过程分解为四个步骤:
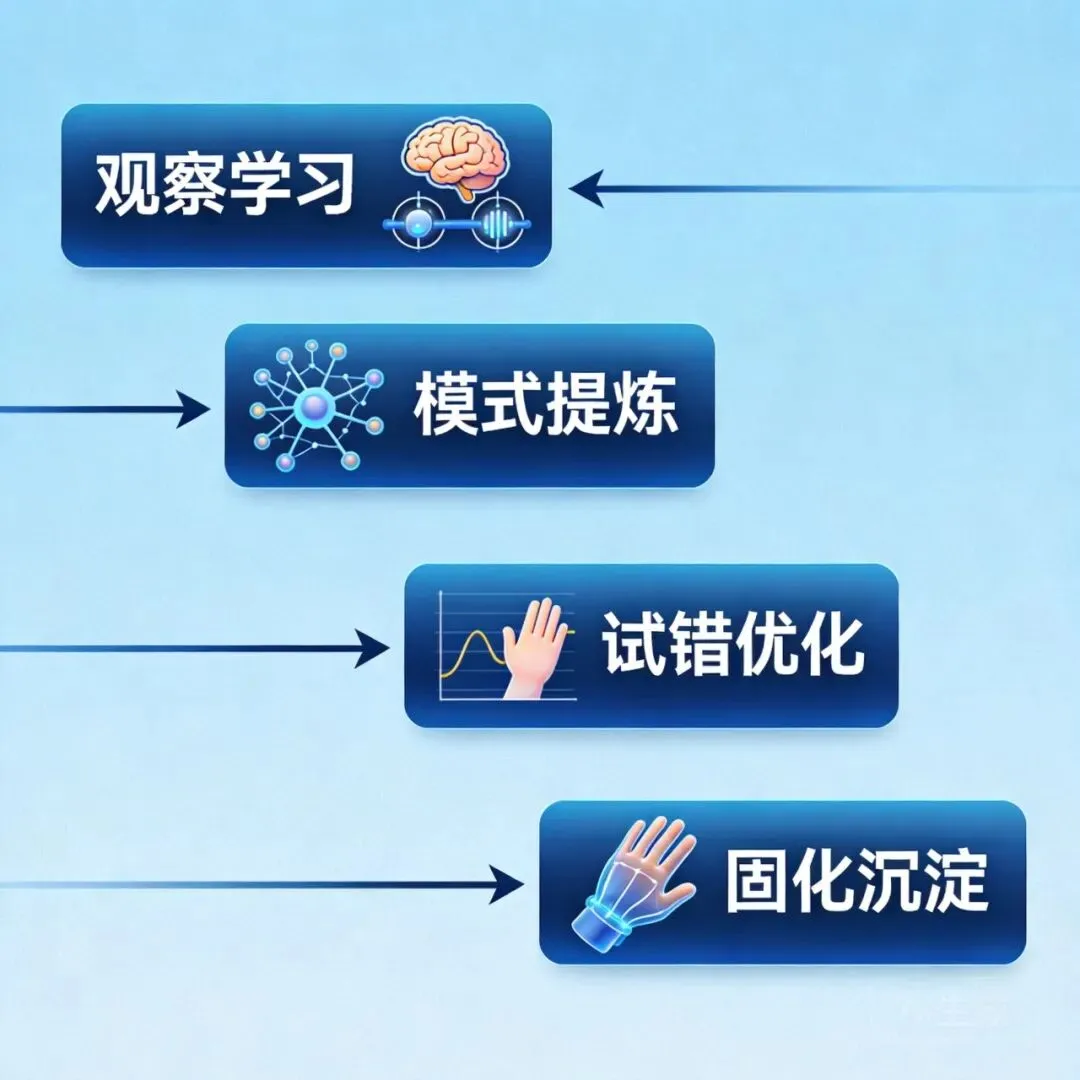
观察学习→模式提炼→试错优化→固化沉淀。我们一步步解析。
3.1 第一步:观察学习——收集骨架使用数据
肌肉记忆形成的第一步,是观察。系统要持续收集各个部件的使用数据,看看骨架到底是怎么被使用的。
需要收集哪些数据?
-
时间维度:什么时候,哪个接口被调用了,频率是多少? -
空间维度:哪些模块经常一起被调用,它们之间的连接流量有多大? -
性能维度:当前的连接方案带来了多少延迟,有没有瓶颈? -
用户维度:用户在什么场景下使用这些功能,用户的操作习惯是什么?
这些数据就是AI学习的原材料。没有这些数据,AI就不知道骨架哪里需要调整。
这里有一个很重要的设计原则:观察不能干扰正常运行。不能因为收集数据,就给系统带来额外的延迟和开销。所以,观察一般都是”带外”进行的,轻量级采样,不会影响正常业务。
现在很多新势力车企都在做用户数据收集,但大部分收集的是用户行为数据,用来改进产品设计。很少有车企收集骨架层面的使用数据,用来动态调整骨架本身。这就是差距所在。
3.2 第二步:模式提炼——发现频繁使用的”姿势”
有了数据之后,AI就要开始提炼模式——看看哪些连接模式是频繁出现的,哪些资源分配方案是常用的。
这个过程有点像采矿——从一大堆杂乱无章的数据里,挖出有规律的模式。
常用的方法有几种:
频繁项集挖掘:找出哪些模块经常一起被调用。比如,发现语音模块+空调模块+导航模块经常一起被调用,这就是一个频繁模式,说明用户经常一边导航一边调空调。那系统就可以考虑把这三个模块的连接优先级提高,预分配一些资源。
聚类分析:把相似的使用场景聚在一起。比如,发现用户工作日早高峰走高架的场景,有相似的动力需求和驾驶风格,那就可以聚成一类,形成一个专门的配置。
强化学习状态建模:把不同的使用场景看作不同的状态,学习每个状态下最优的骨架配置。比如,高速巡航状态下,智驾需要的算力多,座舱需要的算力少,那就把更多算力分配给智驾;停车充电状态下,座舱需要的算力多,智驾基本不用,那就把算力都分给座舱。
这个阶段的关键是不要过度拟合。不能把每个偶然的使用模式都记住,那样骨架会变得很碎,效率反而低。要抓住真正频繁、真正稳定的模式,只记住这些。
3.3 第三步:试错优化——找到最优配置
找到模式之后,就要开始试错优化——针对这个模式,尝试不同的骨架配置,看看哪个效果最好。
这个过程很像生物进化——变异出不同的配置,然后环境选择出好的变异,保留下来。
怎么试错?不能让用户感觉到试错,不能影响用户体验。所以,试错一般都是影子模式运行——新配置和旧配置同时跑,比较它们的性能,但只把结果给用户,不用新配置真正接管。只有当新配置确实比旧配置好,才会切换过去。
评价一个配置好坏的标准有哪些?
-
延迟更低:同样的功能,响应更快。 -
算力利用率更高:没有浪费的算力,也不够。 -
能耗更低:同样的性能,消耗的电量更少。 -
用户满意度更高:如果能从用户交互中得到反馈,那就更好了。
比如,针对用户上班路线这个模式,试一下不同的算力分配方案:分给动力系统多一点,会不会响应更快?分给智驾多一点,会不会能耗更低?试几次,找到一个平衡点,用户体验最好,那就用这个配置。
试错优化是一个持续的过程,不是一次就完了。用户习惯会变,路况会变,所以优化也要持续进行。
3.4 第四步:固化沉淀——变成骨架的一部分
试错找到最优配置之后,就要把它固化沉淀下来,变成骨架的一部分,这就是肌肉记忆形成了。
固化在哪里?一般分两层:
第一层:软件配置层。把最优的连接拓扑、资源分配方案、接口优先级这些,保存成配置文件,下次遇到同样场景,直接加载这个配置。这一层比较轻量,修改也比较容易。
第二层:硬件加速层。如果这个模式真的非常稳定,用户每次用都用到,那就可以考虑把它固化到硬件加速单元里,比如FPGA的逻辑里,或者AI加速器的固定流水线里。这样延迟更低,性能更好。当然,这一层改动成本比较高,只有非常稳定的模式才值得这么做。
固化之后,下次遇到同样场景,不需要再重新计算调度,直接用已经优化好的配置,速度快很多。这就是肌肉记忆的优势——形成之后,反应又快又准。
而且,肌肉记忆是可以遗忘的。如果一个模式很久不用了,系统会自动把它从固化中移除,释放空间给新的模式。这就像我们人类,很久不做的动作,肌肉记忆也会慢慢淡化。很符合生命体的特征。
四、AI赋形带来了什么?五大价值重构
讲清楚了机制,我们来看一个最实际的问题:AI赋形的骨架,到底能给智能汽车带来什么好处?为什么我们需要这个进化?
我总结了五大价值,这些价值重构了用户体验、研发效率和产品生命周期。
4.1 用户体验:越来越顺手的”个性化骨架”
第一个,也是用户最能直接感知到的价值,就是用户体验越来越好。
传统汽车买回去是什么样,就一直是什么样,最多就是OTA更新几个功能,底层骨架不会变。所以,用久了也不会更顺手,顶多就是你习惯了它。
AI赋形的骨架不一样,它会跟着你变。你用得越久,它越了解你的驾驶习惯、使用偏好,骨架就越贴合你,用起来就越顺手。
举几个具体的例子:
-
动力响应:如果你喜欢激进驾驶,它会把动力系统的响应调得更灵敏,扭矩给得更快;如果你喜欢舒适驾驶,它会把响应调得更平缓,油耗更低。而且这个调整不是你手动去设的,它自己观察,自己调整,自己记住。
-
交互流畅度:如果你经常用语音控制,它会把语音模块的优先级提高,预加载模型,响应速度会越来越快;如果你几乎不用语音,它会把资源让给其他模块,不浪费。
-
能耗优化:它会记住你常走路线的红绿灯位置、坡度变化,提前调整能量管理策略,该滑行的时候滑行,该充电的时候充电,不知不觉就能帮你省下不少电。
这种个性化不是厂家给你几个选项让你选,而是汽车自己学出来的,比你自己选的更懂你。
想象一下,你开着这样一辆车,就像穿一双已经被你的脚撑得 perfectly fit 的鞋子,那种舒服是标准码鞋子永远给不了的。这就是AI赋形带来的用户体验质变。
4.2 资源效率:算力利用率提升30%+
第二个价值,是硬件资源利用率大幅提升。
传统静态分区架构,最大的问题就是资源浪费。高峰的时候不够用,低谷的时候闲着。特别是AI大模型上车之后,算力成本这么高,浪费不起。
AI赋形加动态重连,能把闲置的资源充分利用起来。根据国内一家头部芯片厂商的内部测试,动态调度相比静态分区,整体算力利用率能提升30%以上。这个提升幅度非常可观。
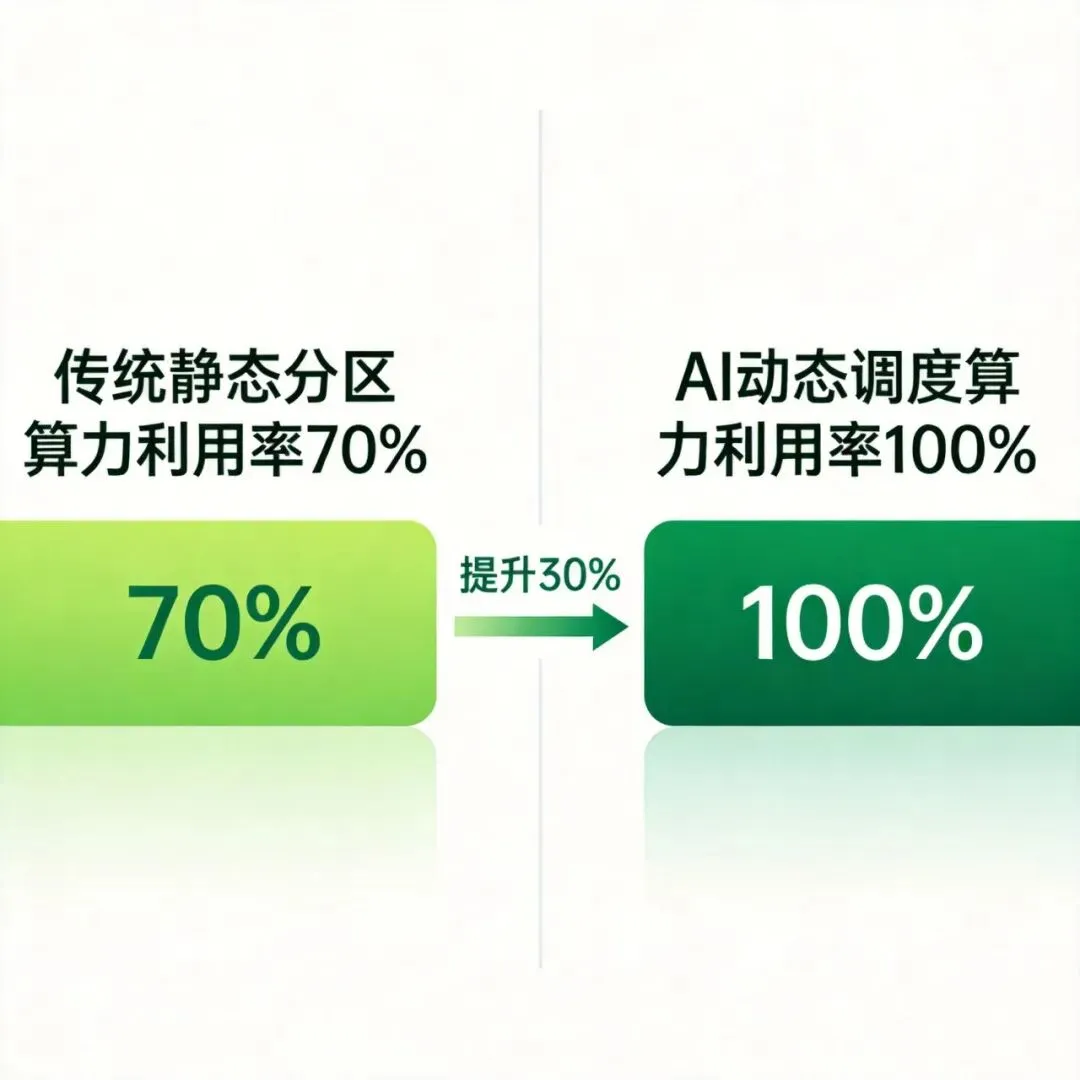
什么概念?原来需要100TOPS的芯片才能满足需求,现在只要70TOPS就够了,成本直接降下来。或者说,同样100TOPS,能支持更多AI功能,用户体验更好。
除了算力,存储、带宽也都能提升利用率。比如,存储资源,常用的模型参数放在高速缓存里,不常用的放在低速存储里,自动冷热交换,既保证性能又节省成本。
资源利用率提升,最终转化就是成本下降或者体验提升,这对车企和用户都是双赢。
4.3 研发效率:接口进化不用停
第三个价值,是整车研发效率提升。
传统汽车研发,骨架在设计阶段就要定下来,接口都要定义好,后面改起来非常麻烦,牵一发动全身。如果某个接口要改,所有用到这个接口的模块都要改,测试工作量巨大。
AI赋形的柔性接口架构,接口是语义化的,动态发现的。新增一个服务,只要注册一下,上层应用自动就能发现,不用改上层代码。删除一个服务,也不会影响其他服务,只要把它注销就行了。
这对于快速迭代开发太友好了。现在智能汽车软件迭代这么快,每个月都更一次,如果每次更新都要改骨架,工程师累死了。柔性接口让骨架进化不用停,新增功能不会牵动全身,研发效率自然就上去了。
还有一个好处,就是第三方应用开发更容易。第三方开发者不需要知道底层硬件的具体接口,只要按照语义调用服务就行了,开发门槛降低,更容易形成生态。
4.4 生命周期:从”出厂即定型”到”终生进化”
第四个价值,是产品生命周期大大延长。
传统汽车,技术更新太快,三五年之后,硬件就不够用了,软件也更不了新,用户就想换车。为什么?因为骨架定死了,新功能需要新的骨架支持,旧骨架撑不住。
AI赋形的骨架不一样,它本身就是软件定义的,能够不断重新塑形。新功能来了,只要重新分配资源,重新组合连接就行了,不需要换硬件。只要核心算力够,骨架就能一直进化下去。
这样一来,汽车的使用寿命就能大大延长。原来可能五六年就要换车,现在可能七八年甚至十年,车还是能跟着时代进化,用户就不用急着换车。
这对于环保也有好处,减少了电子垃圾,符合可持续发展的方向。当然,对于车企来说,这可能意味着新车销量会受影响,但用户价值提升了,整个行业会向服务转型,靠软件服务赚钱,不一定靠卖新车赚钱。
4.5 安全可靠:动态调度反而更安全
讲到这里,可能有人会问:骨架天天变,动态重连,会不会变得不安全?功能安全怎么保证?
其实恰恰相反,AI赋形的骨架,反而能更安全更可靠。为什么?
第一,动态冗余。如果某个硬件出问题了,系统可以自动把它的任务重新分配给其他空闲硬件,只要重新建立连接就行了,不会因为一个硬件故障导致整个系统瘫掉。传统静态架构,一个硬件坏了,对应的功能就没了,很难动态替换。
第二,负载均衡。AI持续监控各个部件的负载,如果某个部件负载太高,温度过高,可以自动把一部分任务分到其他负载低的部件,避免过热过载,延长硬件寿命。
第三,异常检测。AI在观察使用数据的同时,也能检测异常。如果某个接口的行为突然变了,可能就是硬件要出问题了,系统可以提前预警,甚至提前隔离,避免故障扩大。
当然,这不是说动态架构没有安全挑战。恰恰相反,安全设计难度更大,因为状态变多了。但是,只要设计得当,动态架构能做到比静态架构更高的安全性。
五、当前产业实践:哪些玩家在走这条路?
讲了这么多原理和价值,我们来看一看,现在产业界进展如何?哪些玩家已经在往这个方向走了?
5.1 芯片厂商:从”固定分区”到”大一统算力池”
最积极推动这件事的,其实是芯片厂商。因为芯片厂商要卖更高性能的芯片,大一统架构更容易做大芯片,卖更高价格。
我们看几个典型:
英伟达Thor:我之前提到过,Thor就是一个典型的大一统SoC,754TOPS AI算力,整个算力做成一个资源池,可以动态分配给座舱、智驾、ADAS各个功能,支持硬件虚拟化隔离。这就是硬件池化的典型实践。
高通FlexGen:高通最新推出的中央计算架构FlexGen,核心思路就是把多个计算单元整合在一起,通过高通的NXP总线互联,实现动态算力分配。高通自己的宣传就是”软件定义的汽车”,支持动态负载管理。
地平线Journey 6:地平线最新的Journey 6,虽然还是主打智驾,但也开始支持多任务动态调度,可以把多余的算力分配给座舱或者其他AI任务,也是朝着池化方向走。
华为昇腾+麒麟:华为在智能汽车上的思路,也是中央计算+分布式执行,昇腾负责AI计算,麒麟负责CPU计算,通过高速总线连接,软件调度资源。本质上也是池化思路。
芯片厂商走得快,因为它们是架构革命的源头,硬件要先准备好,软件才能跟上。
5.2 新势力车企:探索中央计算+动态调度
接下来是新势力车企,它们没有传统架构的包袱,更愿意尝试新架构。
特斯拉HW 4.0:特斯拉是最早走中央计算路线的。HW 4.0的FSD芯片,就是一个大一统的计算核心,所有AI任务都在上面跑,软件调度。虽然特斯拉没有公开说”肌肉记忆”,但特斯拉确实在持续学习用户驾驶行为,优化控制策略,这其实就是一种肌肉记忆。
小鹏XNGP+中央计算平台:小鹏最新的XNGP架构,背后是小鹏自己研发的中央计算平台,把智驾和座舱的算力整合在一起,支持动态调度。小鹏也在做用户驾驶行为学习,个性化推荐,其实已经开始用到AI来优化骨架配置了。
蔚来NIO Adam:蔚来的Adam超算平台,用了四颗英伟达Orin芯片,总算力1016TOPS,软件层面动态分配给不同的智驾功能,也是池化思路。
理想AD Max:理想最新的AD Max架构,也是采用双Orin+orin,中央计算,动态调度。理想在交互个性化方面做得很多,其实就是在积累数据,为后续更深度的AI赋形做准备。
国内新势力在架构上都比较激进,中央计算是共识,剩下的就是怎么一步步把动态调度和AI赋形做出来。
5.3 传统车企:稳步跟进,试点先行
传统车企因为有庞大的存量开发体系,所以步子会慢一些,但也都看到了这个方向,在稳步跟进。
大众汽车的”软件定义汽车”战略,核心就是把EEA从分布式整合到域集中,再到中央计算,目标就是实现软件定义所有功能。大众投入了几百亿欧元研发软件,就是在为这个转型做准备。
丰田的”Arene”软件平台,也是朝着模块化、动态化方向走,支持OTA更新整个系统,包括底层架构。
宝马的”新世代”架构,从2025年开始,全面采用中央计算架构,软件定义所有功能,这也是在往这个方向走。
传统车企转型慢,但是它们资源多,经验丰富,一旦方向确定,推进起来也很快。
5.4 创业公司:聚焦关键技术,单点突破
还有一些创业公司,聚焦在AI赋形骨架的某个关键技术点上,单点突破。
比如,有些创业公司做汽车领域的服务网格,专门解决动态服务发现和流量调度问题,这就是动态重连的关键技术。
有些创业公司做AI驱动的资源调度,专门优化车载算力的利用率,这就是核心算法。
还有些创业公司做柔性语义接口框架,帮车企更快开发SOA服务,这就是接口柔性的基础设施。
整个生态正在慢慢形成,每个环节都有玩家在做。
六、挑战在哪里?五大障碍需要突破
前景很美好,但我们也要清醒地看到,这条路并不平坦,还有很多挑战需要突破。我总结了五大主要障碍:
6.1 功能安全标准跟不上技术发展
第一个挑战,就是功能安全标准跟不上。
现在汽车功能安全标准ISO 26262,主要是针对静态架构设计的。它要求你在设计阶段就要分析所有可能的故障场景,给出安全机制。但是动态架构,状态空间太大了,不可能在设计阶段把所有可能的动态组合都分析一遍。
这就带来一个问题:技术已经出来了,但安全认证过不了,没法上车。
怎么解决这个问题?需要标准组织更新标准,适应动态架构。同时,业界也在探索新的安全认证方法,比如AI辅助的形式化验证,运行时安全监控,这些新方法可能更适合动态架构。
这个过程需要时间,可能需要三到五年,标准才能跟上。
6.2 软件开发栈需要重构,迁移成本高
第二个挑战,就是整个软件开发栈都要重构,迁移成本很高。
现在汽车软件开发都是基于域架构的,每个域有自己的RTOS,自己的middleware,自己的开发流程。要改成池化架构,动态调度,整个开发栈都要换,从芯片驱动到操作系统到middleware到应用层,都要改。
这对于车企来说,迁移成本非常高,不是说换就能换的。所以,这个转型肯定是渐进式的,先从中央控制域开始,慢慢扩展到其他域,不可能一蹴而就。
6.3 实时性保障难度大
第三个挑战,就是实时性保障难度大。
动态调度肯定会带来一些额外的开销和延迟。对于智驾、动力控制这些对实时性要求非常高的功能,哪怕多几毫秒延迟,都可能出问题。
怎么解决?需要硬件和软件协同优化。硬件层面,更高带宽的互连,更低延迟的内存;软件层面,更聪明的调度算法,预测性调度——提前预测到接下来需要什么资源,提前分配好,这样就能把延迟降下来。
现在看,这个问题是工程问题,不是理论问题,慢慢优化总能解决。
6.4 碎片化的硬件生态
第四个挑战,就是硬件生态碎片化。
现在汽车上的硬件来自不同厂商,接口各不相同,要把它们都池化起来,统一调度,难度很大。每个硬件都要做适配,工作量很大。
这个问题需要时间解决,随着中央计算架构普及,越来越多硬件会开始支持标准化的池化接口,碎片化会慢慢改善。
6.5 用户信任问题:我的车一直在自己改,会不会改坏了?
第五个挑战,就是用户信任问题。
用户会问:我的车骨架一直在自己变,天天自己调整,会不会哪天调整错了,出问题?我怎么信任它?
这个问题需要透明化设计。系统要告诉用户,它调整了什么,为什么调整,用户可以看,可以改,可以回滚到原来的配置。用户有控制权,就会慢慢建立信任。
而且,AI赋形都是渐进式调整,每次只调一点点,试错没问题才固化,不会一下子大变样,风险是可控的。
七、未来展望:十年后的骨架是什么样?
展望一下十年后,AI赋形的骨架会发展到什么样子?我个人有几个判断:
7.1 整车级硬件池化成为标配
十年后,整车级的硬件池化肯定会成为标配。所有计算资源、存储资源都会放在一个大池子里,软件按需分配。所谓的域,更多是逻辑上的划分,不是物理上的分区。
芯片工艺进步,整合度越来越高,把更多计算核心放在同一个die上,成本越来越低,这为整车级池化提供了硬件基础。
7.2 AI会持续塑形,终生进化
汽车真的会变成活的数字生命体。骨架从出厂开始,就在持续不断地被AI塑形,持续形成新的肌肉记忆,持续进化,一直到汽车报废。
用户买的不再是一台固定的机器,而是一个持续成长的生命体。用得越久,它越懂你,越贴合你,价值越来越高,而不是越来越低。
7.3 出现”骨架即服务”商业模式
会出现新的商业模式——“骨架即服务”。车企不再只是卖车,还可以卖持续的架构优化服务,按月付费,持续给用户提供更好的骨架塑形,更好的肌肉记忆。
用户也愿意付钱,因为车确实越用越好开,体验一直在提升。
7.4 个性化程度远超今天想象
未来的个性化,远不止今天换个主题皮肤这么简单。你的车的骨架,就是为你一个人生长出来的,每个接口,每个连接,每个资源分配方案,都带着你的使用痕迹,都是你的肌肉记忆。

世界上没有两片完全相同的树叶,未来也不会有两辆完全相同骨架的智能汽车。每辆车都是独一无二的,因为每个用户的使用习惯都是独一无二的。
7.5 骨架进化会催生全新的设计方法
骨架进化也会催生全新的设计方法。原来的设计方法是”自上而下”——设计师在工厂里设计好一切,用户只用。未来会变成”自下而上”——设计师设计好规则和基础骨架,AI和用户一起完成最终的设计。
设计师从”造物者”变成”园丁”——种下种子,提供土壤,然后看着它生长,修剪它,而不是从头到脚控制每一个细节。这是设计哲学的根本转变。
八、结语:骨架进化是AI赋活汽车的必然一步
我们今天从一个很容易被忽略的维度——骨架——来看智能汽车的进化。大家都在关注AI算法、芯片性能、传感器这些看得见的东西,但是,支撑这一切的骨架,其实也在经历一场深刻的革命。
这场革命的脉络其实很清晰:
-
机械时代:钢铁浇筑的静态骨架,出厂即定型 → -
EEA转型:数字韧带连接的分区骨架,支持一定程度软件定义 → -
AI时代:AI持续赋形的动态骨架,自主形成肌肉记忆,终生进化 →
这是一个必然的进化方向。当AI开始进入汽车的核心,当汽车真的要变成会学习的数字生命体,骨架就不可能再是固定不变的。AI塑造了大脑和神经,自然也要塑造支撑这一切的骨架。肌肉记忆不是什么玄学,就是骨架在使用过程中不断优化、不断固化的结果。
对于用户来说,这场进化带来最直接的好处就是:你的汽车会越来越顺手,越来越懂你。它不仅仅是一台代步工具,真的会变成一个”活”的伙伴,陪着你一起成长。
对于产业来说,这场进化会带来整个价值链的重构。从芯片设计到整车研发,从销售模式到售后服务,都会跟着变。原来卖一次车赚一次钱,未来可以持续提供服务持续赚钱。原来车越用越贬值,未来车越用越贴合用户,反而可能更有价值。
当然,这条路还很长,还有很多技术挑战需要克服,标准需要更新,生态需要重构。但是,方向已经清晰了,走过去只是时间问题。
最后,我想用一个比喻来结束这篇文章:
一百多年前,卡尔·本茨造出了第一辆汽车,给了汽车第一个机械骨架。
今天,我们正在给智能汽车换上一副AI赋形的数字骨架。这副骨架会自己生长,自己学习,自己形成肌肉记忆。
当骨架活起来的时候,汽车才真正变成了有生命的数字生命体。
这就是骨架进化的终极意义——从机械到生命,这是智能汽车的必然归宿。