 夜雨聆风
夜雨聆风
原文信息
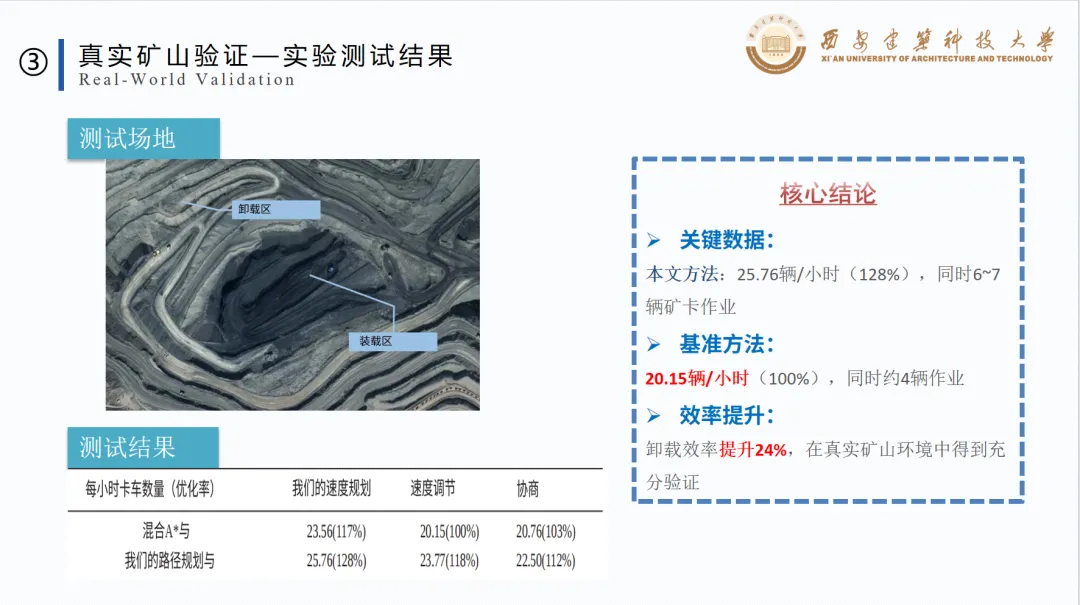
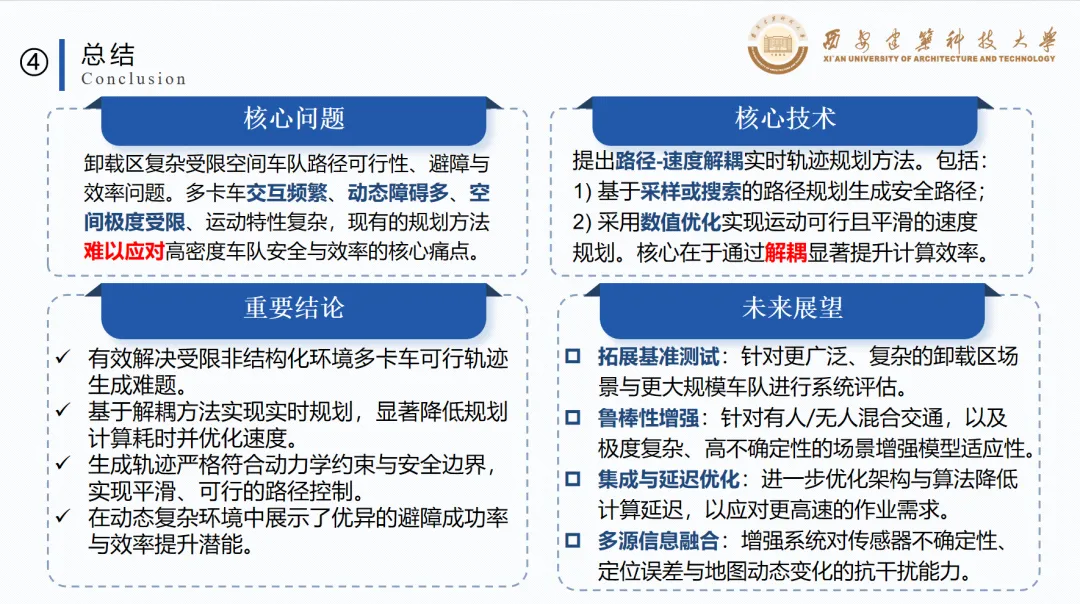
本文对《卸载区域多辆自主矿用卡车的解耦实时轨迹规划》(Decoupled Real-Time Trajectory Planning for Multiple Autonomous Mining Trucks in Unloading Areas)这篇论文进行了深入解析。该论文于2023年发表在《IEEE Transactions on Intelligent Vehicles》(第8卷第10期)上。论文的第一作者是杨清元,就读于中国科学院大学人工智能学院,通信作者为艾云峰研究员。论文团队核心成员陈龙教授是中国科学院自动化研究所复杂系统管理与控制国家重点实验室教授,主要从事自动驾驶、机器人技术和人工智能领域研究,已发表相关论文逾百篇。


END
⬛ 图文来源 | 矿山系统工程研究所
⬛ 责任编辑 | 梅文宇
⬛ 学生审核 | 崔智翔
⬛ 教师审核 | 江 松
