 夜雨聆风
夜雨聆风导语
本实验方案教程提供了一套从理论构建到实践验证的完整路径,帮助研究者在复杂的驾驶环境中精准把脉疲劳预警交互的优劣。通过对“视觉特征、生理信号、车辆行为、反应能力”四类指标的综合考量,并结合六自由度平台模拟的物理疲劳场景,我们能够超越传统的单一精神疲劳研究范式,更全面地还原真实驾驶中的身心负荷状态。

01
研究背景

随着智能座舱技术的快速发展,疲劳驾驶预警系统已成为提升驾驶安全性的核心功能之一。然而,当前多数预警系统存在两大核心问题:
·预警形式单一:多以声音为主,未充分考虑用户接受度差异。
·触发阈值不合理:易出现误报、漏报问题,且预警触发阈值未结合长时间驾驶产生的物理疲劳(如颠簸路面导致的肌肉疲劳、持续转向导致的神经疲劳)开展实场景验证。
现有驾驶模拟器实验多侧重精神疲劳(如视觉专注疲劳),忽略了物理疲劳与精神疲劳的耦合效应;同时,预警交互逻辑多基于理论推导,缺乏真实驾驶场景下的在环验证。基于此,本实验依托搭载八轴六自由度的驾驶模拟器,结合SILAB场景仿真与LED环幕沉浸式体验,模拟“物理疲劳+精神疲劳”双维度疲劳状态,测试不同预警形式及触发阈值的有效性与用户接受度,最终优化预警交互逻辑,提升智能座舱的安全性与用户体验。
参考标准:
ISO 23456:2020《道路车辆 驾驶员疲劳生物特征检测方法》
GB/T 34567-2017《驾驶员疲劳状态生物特征监测技术规范》。

02
方案提供者——科驰智能

科驰智能在汽车驾驶研究领域已深耕十余年,作为全栈式驾驶模拟测试技术方案提供商,我们陪伴超过200家行业领先客户,共同应对科研与测试中的关键挑战。


01
服务领域
我们提供从智能驾驶系统研发与测试、交通管理与交通安全、驾驶人机交互、 智慧交通系统融合创新的一站式汽车驾驶测试解决方案。
智能驾驶系统研发与测试:支持从数据采集、融合到决策控制的自动驾驶全闭环测试,为人机接管、自动驾驶功能等关键研究提供稳定验证平台。
交通管理与交通安全:研究交通流管理、道路设计优化、交通事故预防以及分心/疲劳驾驶机理,助力交通管控策略推演与交通安全策略优化。
驾驶人机交互:研究驾驶员认知负荷与人机交互机理,为智能座舱HMI设计优化提供真实、可控的测试环境与关键人因数据支撑。
智慧交通系统融合创新:提供车路协同技术验证与智能网联汽车多项映射交通实验平台方案,助力智慧交通系统从技术验证推演到规模化落地。

02
解决方案
我们坚持以技术创新为核心驱动力,持续拓展测试方案的维度与深度。目前成熟支持的方案包括:
高沉浸度驾驶模拟平台:采用实车座舱、运动平台与全景环幕,结合驾驶仿真软件,提供视觉、听觉与体感高度融合的逼真驾驶体验,用于驾驶行为与智能系统研究。
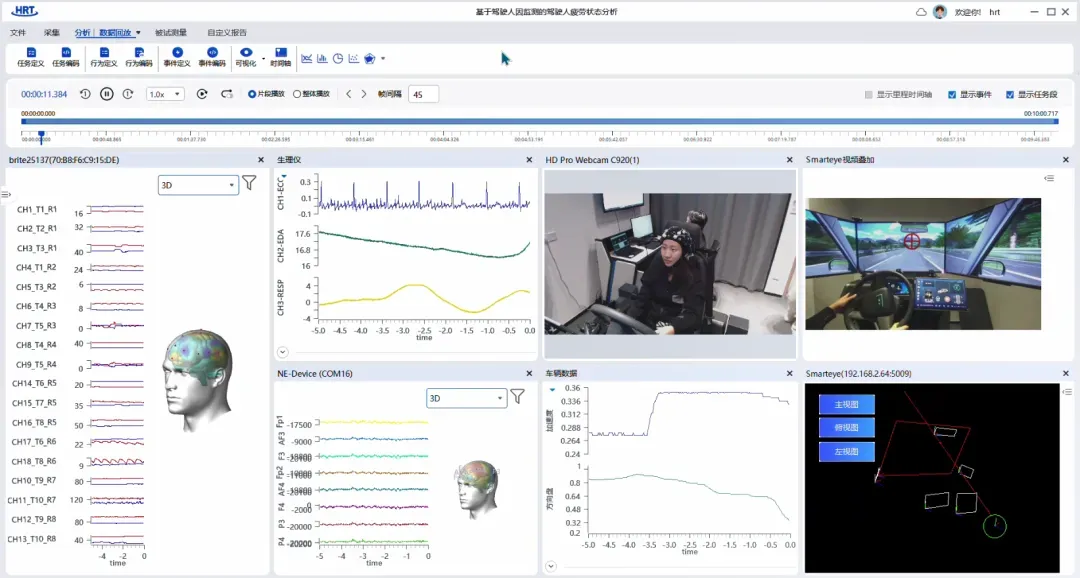
多模态驾驶人行为研究方案:同步采集驾驶人的脑电、近红外、眼动、生理、操作与环境数据等,构建从感知认知到行为执行的综合分析体系,为智能座舱设计、人机共驾与交通安全研究提供数据驱动的科学依据。
VR虚拟现实交互系统:通过高精度3D建模与头显设备,构建1:1数字孪生驾驶场景,在虚拟环境中实现沉浸式视觉与感官交互,支持设计验证与驾驶培训。
虚实多项映射系统:构建物理实体与数字模型的动态映射,实现“人-车-路-环境”在虚实融合场景中的闭环交互,快速、低成本地进行大规模测试,为高阶自动驾驶算法的验证提供可重复、可扩展的仿真平台。
硬件在环(HIL)测试系统:利用实时仿真器模拟车辆与交通环境,对控制器进行闭环测试与故障注入,实现对电控单元功能、性能及可靠性的高效、安全、可重复的闭环验证,显著缩短开发周期。
汽车在环仿真(VIL)测试系统:将真实车辆接入高精度虚拟仿真环境,实现对车辆动力学、感知及决策算法在复杂、极限和危险场景下的高效、安全闭环验证。无需实车改装即可支持多种车型的动态验证,大幅节约测试成本与时间。
自动驾驶测试平台:通过模拟仿真与封闭场地实测相结合的方式,系统验证自动驾驶系统在不同场景下的安全性与可靠性。方案借助多传感器集成,实时采集环境数据,实现从感知、决策到控制的全链路开发与测试,能够满足自动驾驶人机交互与控制权转换等关键研究需求。

03
实验目的
01
有效性验证
验证视觉、听觉、触觉警告是否按预期有效提示驾驶员,并评估其对驾驶员疲劳状态的改善效果,具体指标包括反应时间、车道保持能力及眼动参数。

02
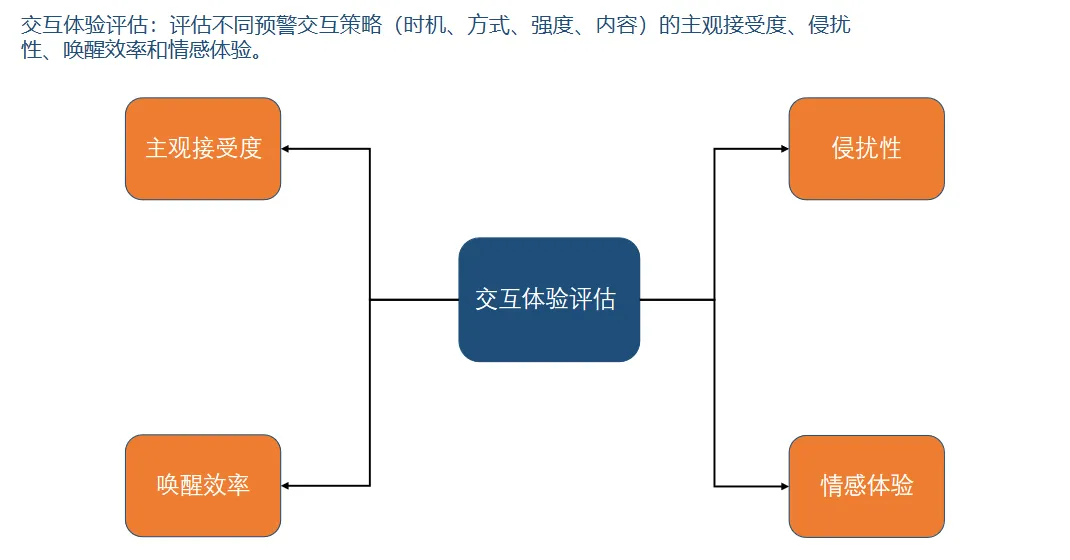
交互体验评估
通过收集受试者的主观反馈,从主观接受度、唤醒效果、侵入感以及情感体验等维度,对所设提醒功能进行综合评估。该评估旨在为提醒方式的优化迭代提供依据,以实现最佳的警示效果。

03
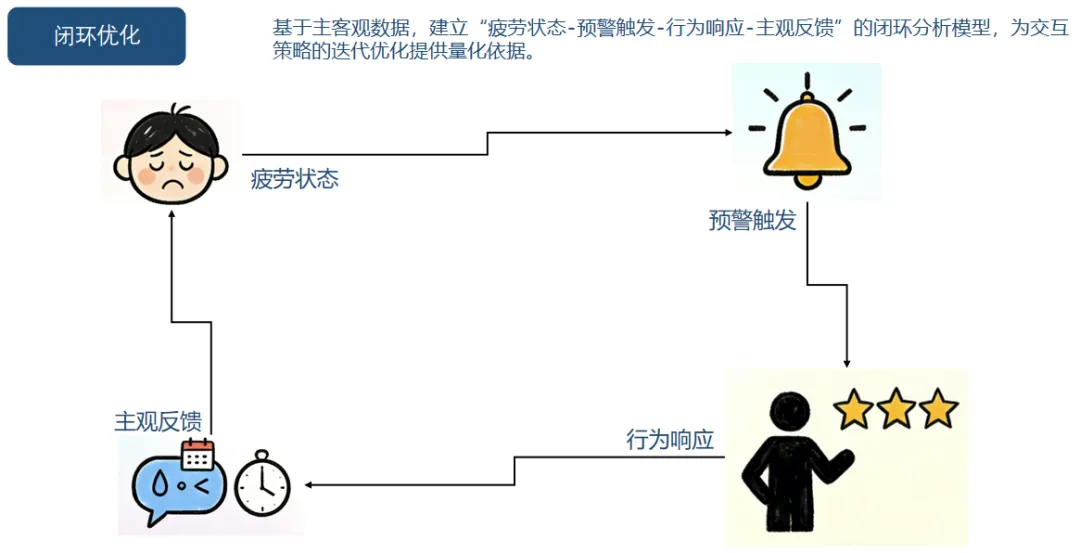
闭环优化建模
基于主客观数据,建立“疲劳状态-预警触发-行为响应-主观反馈”的闭环分析模型。
闭环优化建模基于驾驶员客观生理 / 行为参数与主观体验评价的多维度数据,通过数据关联分析优化疲劳预警系统的交互逻辑。
04
实验设备
本实验设备分为驾驶仿真设备、生理数据采集设备、行为数据采集设备、辅助设备四类,其中用户现有设备已标注,补充设备按需配置:

01
驾驶模拟器系统设备

驾驶模拟器
由于在实际道路上开展疲劳驾驶验证存在极高的安全风险,必须构建高保真、沉浸式的仿真实验环境。本研究采用科驰智能SIMLAB八轴六自由度驾驶模拟器作为核心平台,其座舱基于实车改造,完整保留了后视镜、中控屏、电动座椅等原车配置,同时具备高度可定制化扩展能力,可灵活集成DMS摄像头、遥测式眼动仪(如Smart Eye)等设备,满足多模态数据采集与交互验证需求。

驾驶模拟仿真软件
SILAB驾驶模拟仿真软件支持绘制多种道路场景、多种天气效果,添加小轿车、卡车、厢式车、摩托车、自行车等车辆动力学模型,到达逼真的道路实景仿真效果。

02
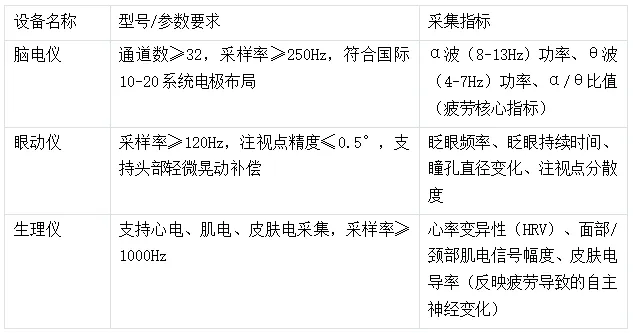
生理数据采集设备
03
行为数据采集设备

05
数据指标

设备选择完毕后,需进行疲劳驾驶状态的实时判定,以识别驾驶员何时进入疲劳状态,进而启动相应的预警机制。常用的判定方法包括视觉特征法、生理信号法、车辆运动与操作行为法与反应能力评估法。
驾驶疲劳通常表现为以下典型行为特征:


01
疲劳驾驶判定方法


02
核心指标含义


扫描二维码获取完整方案


科驰智能DrivingTech是赢富集团旗下全资子公司,秉持技术创新驱动汽车驾驶测试理念,以DIL(Driver in Loop)方法为核心,“人-车-路”协同数据为支撑,提供高性能汽车驾驶模拟器、汽车在环测试系统、自动驾驶测试车、自动驾驶机器人(支持人机共驾)、数据采集与分析软件平台,广泛应用于智能驾驶、人机交互、智能座舱、汽车用户体验、底盘及动力学以及交通道路安全、智慧交通等领域。如需获取相关产品或了解更多信息,欢迎致电4006-111-556详询!

