 夜雨聆风
夜雨聆风从自动驾驶到手术机器人,从智能制造到家庭服务——AI正在从“会思考”进化到“会行动”
引言:AI的“第二次革命”
如果你问一个普通人:“人工智能能做什么?”大概率会听到这些答案:写文章、画图、聊天、推荐商品、翻译语言……
没错,这些都是AI的本事。但它们都局限在一个共同的空间里——数字世界。
这些AI处理的是文字、图像、声音,输出的是信息、建议、内容。它们像一位博学的顾问,能给你建议,却无法替你动手。
但现实世界的问题,光靠“说”是不够的。我们需要的不仅是能告诉你“这辆车应该刹车”的AI,更需要能自己踩下刹车的AI。
这就是物理AI(Physical AI)——人工智能从“虚拟大脑”进化为“实体代理人”的关键一跃。
物理AI不是新的概念,但直到最近几年,随着传感器技术、深度学习算法和机器人工程的深度融合,它才真正从实验室走向了现实应用。本文将带你全面了解物理AI的定义、核心技术、应用场景、面临的挑战,以及它将如何重塑我们的未来。


一、什么是物理AI?——当AI有了“身体”
1.1 定义:连接数字与物理的智能
物理AI是指能够通过传感器感知物理环境,基于感知信息进行判断和学习,并通过执行器对现实世界产生物理影响的人工智能系统。
简单说:传统AI是“会思考的软件”,物理AI是“会思考且会行动的机器”。
物理AI的核心特征可以概括为三个词:感知、判断、行动。
这三者缺一不可,形成一个闭环:感知环境→理解情境→做出决策→执行动作→再次感知……如此循环往复。
1.2 物理AI vs 传统AI:本质区别在哪里?
很多人会问:“自动驾驶汽车不就是装了AI的汽车吗?这和手机里的语音助手有什么本质不同?”
答案在于交互的维度。
传统AI是“观察者”和“分析师”,物理AI是“参与者”和“执行者”。物理AI必须应对真实世界的复杂性和不确定性——光线变化、天气影响、物体移动、人类行为……这些在数字世界里不存在的问题,物理AI必须实时解决。
1.3 物理AI的三大核心能力
物理AI之所以能“动起来”,依赖三大支柱:
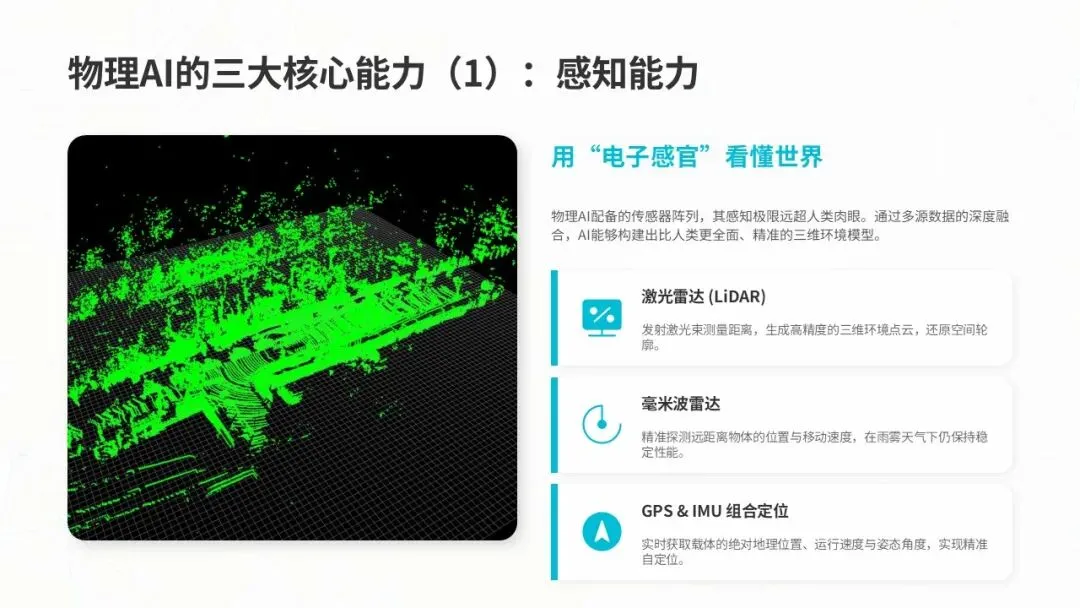
(1)感知能力:用“电子感官”看懂世界
物理AI配备的传感器远超人眼的极限。自动驾驶汽车上,不仅有高清摄像头,还有激光雷达(LiDAR)通过发射激光束测量距离,生成周围环境的三维点云;有毫米波雷达探测远距离物体和速度;有GPS和IMU定位自身位置和姿态。这些数据融合在一起,让AI“看”得比人更远、更准、更全面。
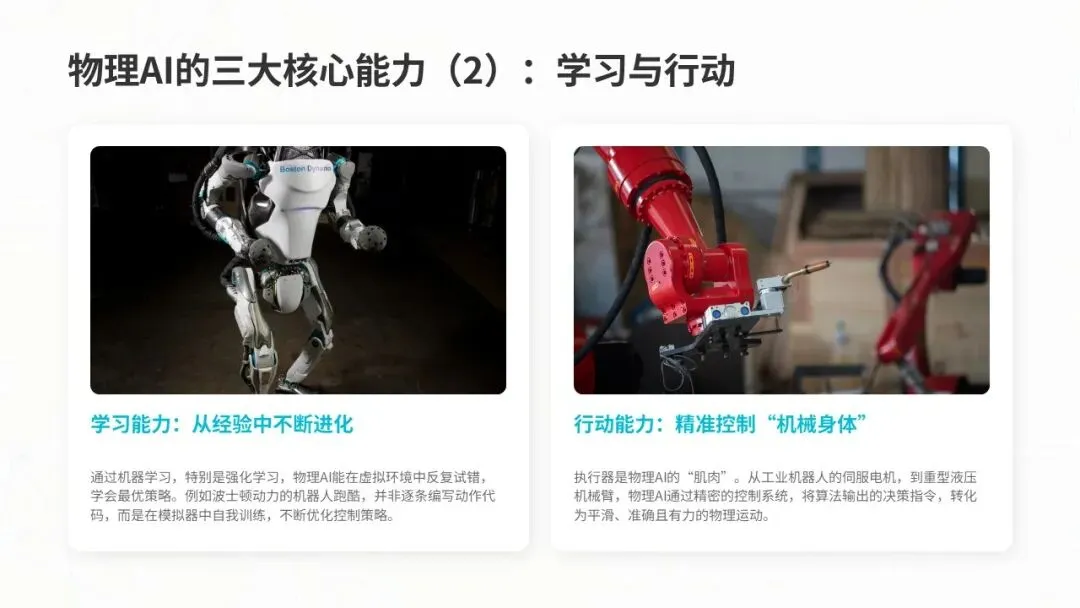
(2)学习能力:从经验中不断进化
物理AI不是预先编好所有动作的程序。通过机器学习,特别是强化学习,它能在虚拟环境中反复试错,学会最优策略。例如,波士顿动力的机器人学会跑酷,不是在代码里一条条写动作,而是让AI在模拟器中自我训练,不断优化控制策略。
(3)行动能力:精准控制“机械身体”
执行器是物理AI的“肌肉”。从工业机器人中常见的伺服电机,到液压驱动的重型机械臂,再到软体机器人中使用的人工肌肉,物理AI通过精密的控制系统,将算法输出的指令转化为平滑、准确、有力的物理运动。
二、物理AI的进化之路:从Shakey到Figure 01
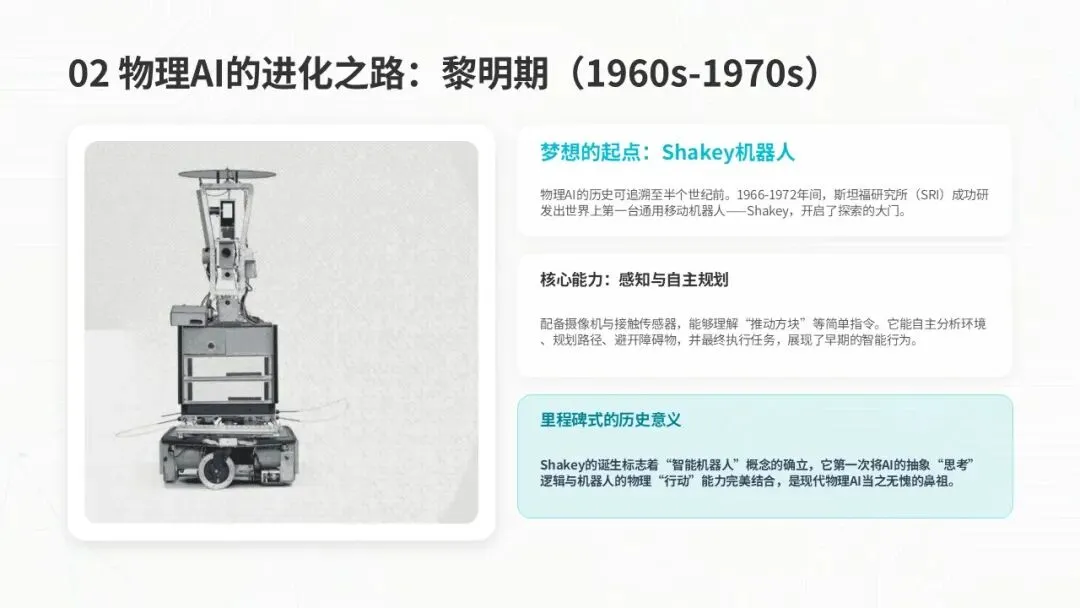




2.1 黎明期(1960s-1970s):梦想的起点
物理AI的历史可以追溯到半个多世纪前。
1966年至1972年间,斯坦福研究所(SRI)开发出了世界上第一个通用移动机器人——Shakey。它配备了一台摄像机、接触传感器,通过无线电与主机通信。Shakey能够理解简单的指令,如“把某个方块推到某个位置”,然后自主规划路径、避开障碍物、执行任务。
Shakey的诞生标志着“智能机器人”概念的正式确立。虽然以今天的标准看,它的能力极其有限(一个简单的任务可能需要几个小时),但它的意义在于:第一次将AI的“思考”与机器人的“行动”结合在了一起。
2.2 技术突破期(1990s-2010s):计算能力的飞跃
1997年,IBM的超级计算机“深蓝”击败了国际象棋世界冠军卡斯帕罗夫。虽然深蓝不是物理AI,但它向世界展示了AI在特定领域的巨大潜力,极大地推动了整个AI领域的信心和投入。
真正让物理AI脱胎换骨的,是深度学习的崛起。2012年,AlexNet在ImageNet图像识别竞赛中取得突破性成绩,开启了深度学习时代。此后,卷积神经网络(CNN)让机器“看”的能力突飞猛进;强化学习让机器在复杂环境中学会决策;自然语言处理让机器能与人类对话。
这些技术迅速被应用到机器人领域。自动驾驶汽车的感知模块不再需要人工设计特征,而是由深度神经网络从海量驾驶数据中自动学习。机器人的抓取动作不再需要精确建模每个物体的几何形状,而是可以通过深度强化学习在模拟器中训练出通用抓取策略。
2.3 爆发期(2020s至今):从实验室到产业化
近五年,物理AI进入加速爆发阶段。
自动驾驶:Waymo、Cruise等公司在部分地区实现了真正的无人驾驶出租车运营。特斯拉的FSD(Full Self-Driving)系统已向数百万用户推送。
人形机器人:特斯拉的Optimus、Figure AI的Figure 01、波士顿动力的Atlas……人形机器人从“会跳舞的玩具”进化为“能干活”的工人。Figure 01甚至能通过大语言模型与人类对话、理解指令并执行任务。
工业机器人:发那科、ABB、库卡等传统巨头全面拥抱AI,推出智能分拣、自适应焊接、预测性维护等解决方案。
服务机器人:从扫地机器人到送餐机器人,从酒店前台机器人到医疗辅助机器人,物理AI正在走进日常生活。
中国企业在物理AI领域同样表现亮眼:大疆的无人机、优必选的人形机器人、新松的工业机器人、小鹏的飞行汽车……都在各自的赛道上积极布局。
三、物理AI的核心技术栈
物理AI的技术体系可以分成四个层次:感知层、决策层、执行层和基础设施层。


3.1 感知层:让机器“看见”“听见”“触到”
物理AI的感知能力依赖于多种传感器的协同工作,以及先进的数据处理算法。
主要传感器类型:
关键数据处理技术:
传感器融合:将不同传感器的数据进行时间和空间上的对齐,互补各自缺点。例如,摄像头图像分辨率高但缺乏深度信息,LiDAR提供精确深度但分辨率低,融合后得到高质量的3D感知结果。
信号处理:去除噪声、校正畸变、提取特征。
边缘计算:在传感器附近进行初步处理,降低传输延迟和带宽需求。
3.2 决策层:让机器“思考”和“学习”
物理AI的“大脑”由各种机器学习模型构成。
计算机视觉:物体检测、语义分割、目标跟踪、姿态估计。自动驾驶汽车需要实时识别出行人、车辆、交通标志、车道线等。
路径规划与运动规划:从A点到B点怎么走?如何避障?如何在动态环境中实时调整轨迹?
强化学习:通过试错学习最优策略。在模拟环境中,机器人可以经历数百万次摔倒,学会行走、奔跑、甚至后空翻。
大语言模型:最新趋势是将LLM引入机器人,使机器人能理解自然语言指令,进行任务分解和常识推理。
3.3 执行层:让机器“动手”
执行器将控制信号转化为机械运动。
3.4 基础设施层:支撑物理AI运行的环境
仿真平台:NVIDIA Isaac Sim、Gazebo、MuJoCo等,让AI在虚拟世界中“预训练”,大幅降低真实世界的试错成本。
云计算与边缘计算:复杂的模型训练在云端,实时推理在边缘端(车载、机载)。
5G/6G通信:低延迟、高可靠性的无线连接,对远程操作、车路协同至关重要。
四、物理AI正在改变哪些行业?
4.1 制造业:从“自动化”到“智能化”
传统工业机器人只能重复预设动作,而物理AI赋能的机器人能够适应变化、自主决策。
案例1:智能质检
在电子制造工厂,AI视觉系统能以远超人类的精度和速度检测出产品表面的微小划痕、焊点缺陷、装配错误。这类系统已在苹果、华为、富士康等企业的生产线上大规模部署。
案例2:预测性维护
通过在设备上安装振动、温度、电流传感器,AI模型能提前数周预测设备故障,并自动安排维护计划,避免生产中断。某汽车零部件工厂采用后,非计划停机时间减少了60%。
案例3:自适应焊接
传统焊接机器人需要精确的工件定位和轨迹编程。而装备了视觉和力觉传感器的智能焊接机器人,能实时感知焊缝位置和间隙变化,自动调整焊枪姿态和参数,即使工件有装配误差也能焊出高质量焊缝。
4.2 医疗健康:精准、微创、个性化
案例1:达芬奇手术机器人
Intuitive Surgical公司的da Vinci系统是全球最成功的手术机器人之一。外科医生通过控制台操作,机器人手臂以微米级精度执行手术,能滤除人手颤抖,实现更小切口、更少出血、更快恢复。新一代系统已集成AI辅助功能,如术中导航、危险区域预警等。
案例2:康复机器人
对于中风、脊髓损伤患者,康复训练是漫长的过程。康复机器人如瑞士Hocoma的Lokomat,能根据患者的实时肌电信号和运动表现,动态调整辅助力度,让训练更有效、更有趣。
案例3:智能假肢
先进的智能假肢通过肌电传感器捕捉残肢肌肉信号,用深度学习模型解读用户的运动意图,控制假肢做出抓、握、捏等精细动作。
4.3 物流与仓储:效率的革命
案例1:亚马逊的Kiva/Proteus机器人
亚马逊仓库中数以万计的自主移动机器人(AMR)将货架搬运到拣货员面前,大幅减少了员工行走时间。新一代Proteus还能与人类协作,自动通过仓库门禁。
案例2:无人配送车和无人机
Nuro的R3无人配送车已在加州、得州等地为居民运送杂货。中国的美团、京东也在多个城市试点无人机和无人车配送。
4.4 自动驾驶与智能交通
这是物理AI应用最广泛、竞争最激烈的领域。
Robotaxi:Waymo已在旧金山、凤凰城等城市提供全天候无人驾驶出租车服务。百度Apollo的“萝卜快跑”也在北京、武汉等中国城市运营。
自动驾驶卡车:图森未来、智加科技等公司致力于干线物流的L4级自动驾驶,目标是降低司机疲劳、提高燃油经济性。
自动泊车:特斯拉、小鹏、蔚来等品牌已实现“记忆泊车”甚至“代客泊车”,车辆能自己开进地下车库找到车位并停好。
4.5 农业:从“经验农业”到“数据农业”
案例1:无人拖拉机
约翰迪尔、凯斯纽荷兰等农机巨头已推出L4级无人拖拉机,可以24小时不间断作业,精度达到厘米级。
案例2:智能采摘机器人
以色列的FFRobotics、中国的丰疆智能等公司开发的水果采摘机器人,利用视觉识别成熟果实,用软体抓手无损采摘。
案例3:植保无人机
大疆的农业无人机能自动规划航线、变量喷洒农药,效率是人工的数十倍。
五、物理AI面临的挑战与困境
物理AI的发展并非一帆风顺。技术的“光”有多耀眼,背后的“影”就有多深。
5.1 技术挑战:真实世界的复杂性
挑战1:感知的不确定性
现实世界充满变化:阳光直射会让摄像头过曝、雨雪天气会衰减激光雷达信号、灰尘会污染传感器……任何感知错误都可能导致灾难性后果。虽然传感器融合技术可以缓解部分问题,但完全消除不确定性仍是巨大挑战。
挑战2:长尾问题(Corner Cases)
自动驾驶领域有一个著名的说法:“完成90%的驾驶场景只需要10%的工作量,但剩下的10%需要90%的工作量。”那些罕见但危险的场景——路上突然滚出一个轮胎、行人从停着的公交车前冲出、冰雪覆盖的车道线——无法通过大规模路测穷尽。
挑战3:泛化能力
在模拟器中训练得很好的机器人,到了真实环境中往往会“水土不服”。这种“模拟到现实”的鸿沟是当前强化学习应用于机器人的主要障碍。
5.2 伦理与社会挑战
挑战1:自动驾驶的“电车难题”
这是一个经典的思想实验:如果刹车失灵,前方左边是一个行人,右边是三个行人,自动驾驶汽车应该撞向哪边?工程师如何编程?谁为决策负责?这些问题至今没有标准答案。
挑战2:隐私与监控
物理AI设备(如公共区域的智能摄像头、家庭中的服务机器人)持续收集海量数据。这些数据可能被滥用,形成全方位的监控体系,侵犯个人隐私。
挑战3:就业冲击
物理AI将替代大量重复性体力劳动。卡车司机、仓库搬运工、分拣员、收银员……这些岗位面临被自动化取代的风险。虽然AI也会创造新岗位(如机器人维护、AI训练师),但转型需要时间,中间可能出现大规模失业。
挑战4:责任归属
当一台手术机器人出错导致患者死亡,谁负责?制造商?医院?操作医生?AI本身?现行法律体系尚未准备好回答这些问题。
5.3 成本与基础设施挑战
高成本:高精度传感器(如车规级LiDAR)、高性能计算单元、精密执行器价格昂贵,制约了物理AI的普及。
能源效率:移动机器人需要电池供电,而AI计算和机械运动都很耗电。如何延长续航是核心问题。
基础设施适配:自动驾驶需要高精度地图、车路协同设施;无人机需要起降场、空管系统。这些基础设施的建设需要大量投资和时间。
六、物理AI的未来展望
尽管挑战重重,物理AI的前景依然令人振奋。
6.1 技术趋势
趋势1:基础模型(Foundation Models)进入物理世界
像GPT-4这样的基础模型正在被应用于机器人。Google的PaLM-E、RT-2等模型将视觉、语言和机器人动作统一到一个大模型中,使机器人能理解自然语言指令、进行常识推理。例如,用户说“帮我把桌上的苹果拿过来”,机器人能理解“苹果”是什么、“拿”的动作含义,并规划路径。
趋势2:更高效的学习方法
自监督学习:利用无标注数据预训练,减少对人工标注的依赖。
迁移学习:将在模拟器中学到的技能迁移到真实机器人。
元学习:让机器人学会“如何学习”,快速适应新任务。
趋势3:软体机器人
传统的刚性机器人灵活性和安全性有限。软体机器人使用柔性材料,模仿章鱼触手、象鼻等生物结构,能安全地与人和环境交互,在医疗、家庭服务等领域潜力巨大。
趋势4:人机协作
未来的物理AI不是取代人类,而是增强人类能力。外骨骼机器人让工人能轻松搬运重物、让残疾人重新行走;协作机器人(cobot)与工人在同一产线上并肩工作,AI负责重复、繁重、危险的部分,人类负责判断、创造、情感交流。
6.2 社会影响
生活便利:家务机器人、陪伴机器人、智能家居将解放人们的双手。
安全提升:自动驾驶将大幅减少交通事故(94%的事故由人为失误引起);救灾机器人能进入人类无法到达的危险区域。
医疗普惠:手术机器人让偏远地区的患者也能享受到顶级专家的精准手术;康复机器人降低康复师的人力成本。
6.3 我们需要做什么?
面对物理AI的浪潮,社会各界都需要做好准备:
政府:制定合理的法规和标准,投资基础设施建设,为失业人群提供再培训支持。
企业:投入研发,培养跨学科人才(机械、电子、计算机、AI),关注伦理和安全。
教育机构:改革课程体系,培养具备机器人、AI、控制理论等综合能力的人才。
公众:理性看待AI,学习新技能,拥抱变化。
结语:物理AI是工具,不是主人
物理AI的终极形态,不是《终结者》里的天网,也不是《西部世界》里的接待员。它应该是人类能力的延伸——像汽车延伸了腿,像望远镜延伸了眼,像起重机延伸了手臂。
物理AI将让人类从繁重、重复、危险的工作中解放出来,让我们有更多时间去做那些只有人类才能做的事:创造、共情、思考、爱。
但这一切的前提是:我们必须在技术发展的同时,认真思考伦理、法律、社会影响,让物理AI服务人类,而不是支配人类。
下一次,当你看到一辆没有司机的车从身边驶过,或一台机器人帮你取回快递时,不妨想一想:它背后凝聚了多少技术的突破、多少工程师的汗水,以及——它代表着怎样的未来。
这个未来,正在我们眼前展开。


