 夜雨聆风
夜雨聆风
想做这个机器人吗?高42厘米(腿伸长),整个成本不到400美元。大佬开源了:CAD文件、代码,可以完全3D打印,总共49个零件。
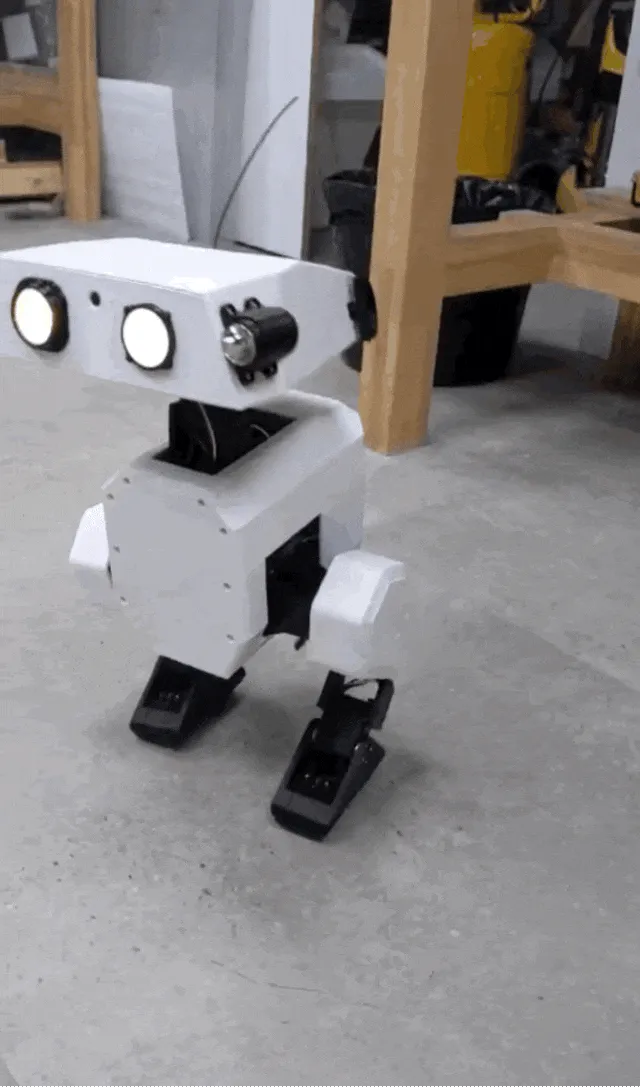
硬件部分
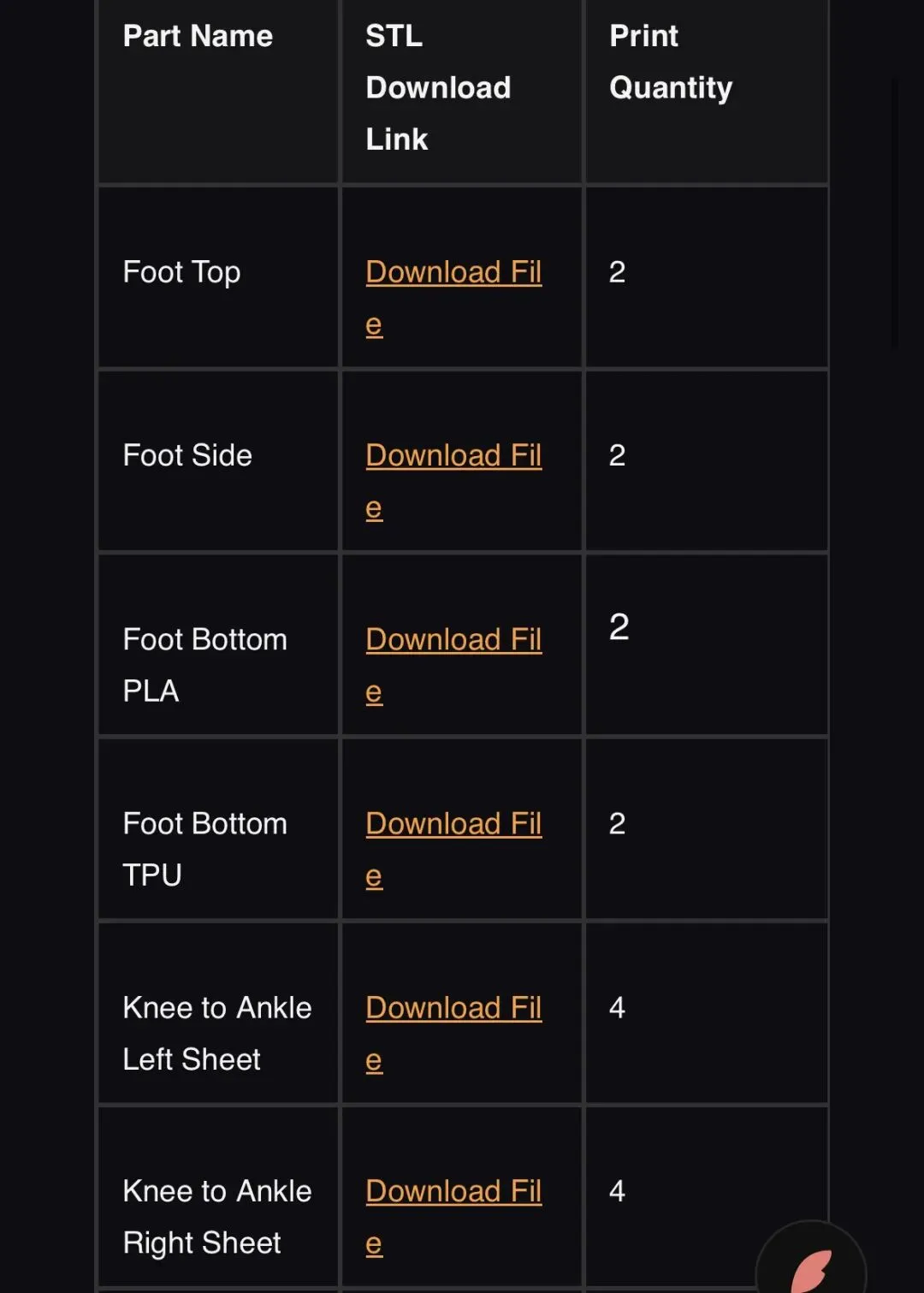
所有部件均以15%填充的标准PLA打印,但foot_bottom_tpu.stl除外,它将以40%填充的TPU打印。
https://tnkr.ai/explore/docs/open-duck-mini/open-duck-mini-v2#print-guide
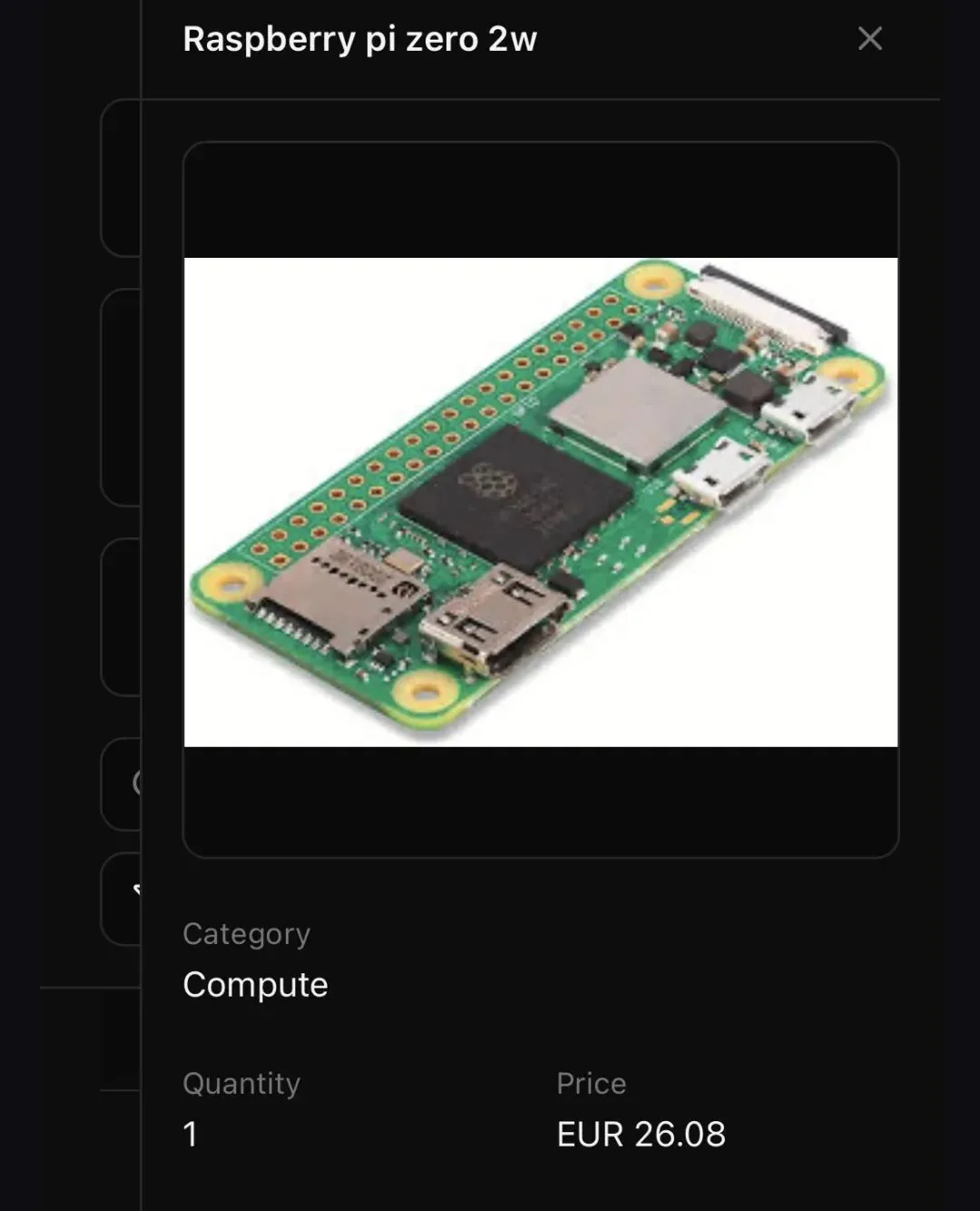
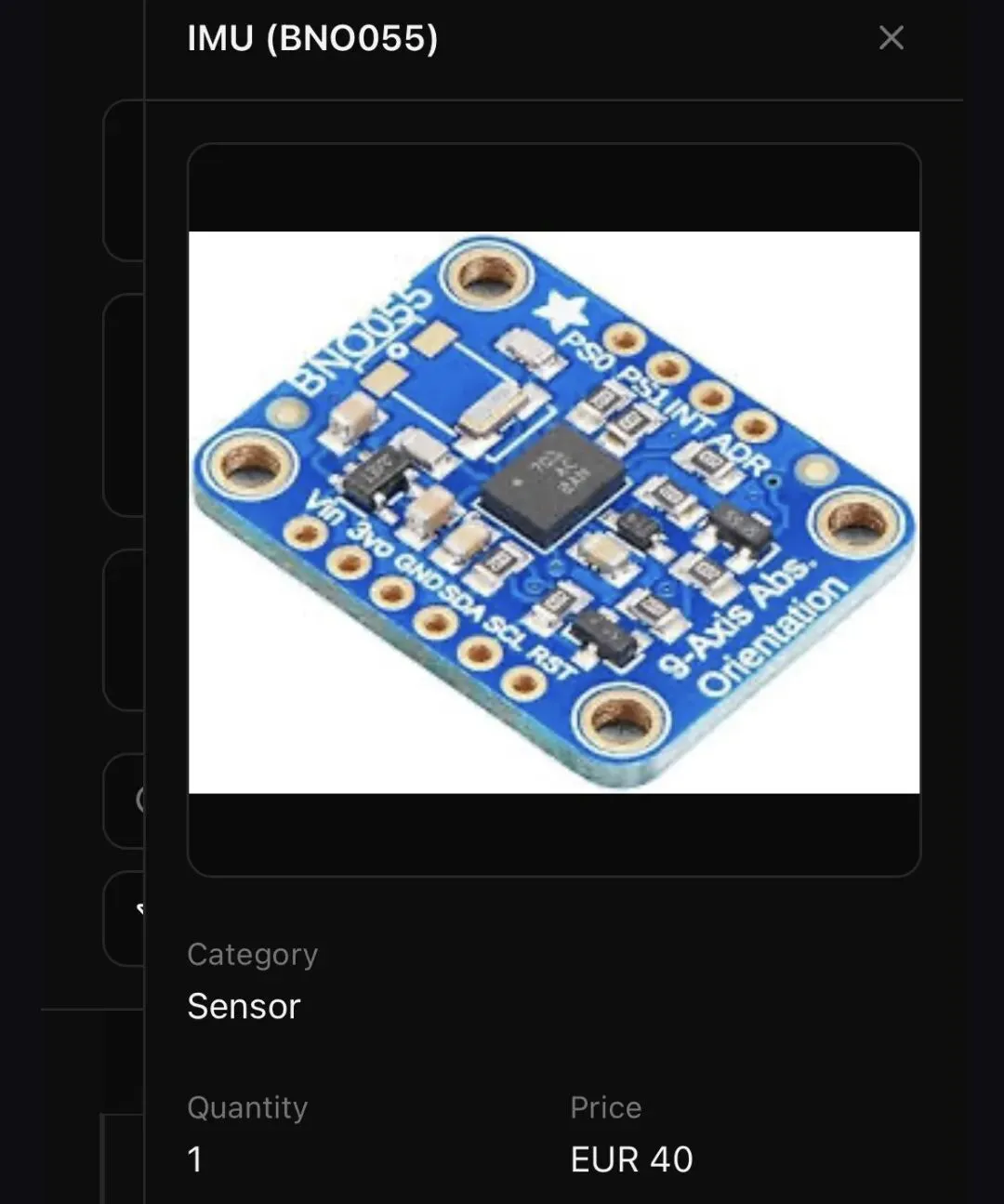
最贵的是这个芯片,用来运行控制程序
软件部分
配置好Pi OS运行时
https://github.com/apirrone/Open_Duck_Mini_Runtime
然后下载这个调好的模型(https://github.com/apirrone/Open_Duck_Mini/blob/v2/BEST_WALK_ONNX_2.onnx)就可以运行了
cd scripts/
python v2_rl_walk_mujoco.py --onnx_model_path <path_to>/BEST_WALK_ONNX_2.onnx
- The commands are :
- A to pause/unpause
- X to turn on/off the projector
- B to play a random sound
- Y to turn on/off head control (very experimental, I don't recommend trying that, it can break your duck's head)
- left and right triggers to control the left and right antennas
- LB (new!) press and hold to increase the walking frequency, kind of a sprint mode 🙂
