 夜雨聆风
夜雨聆风

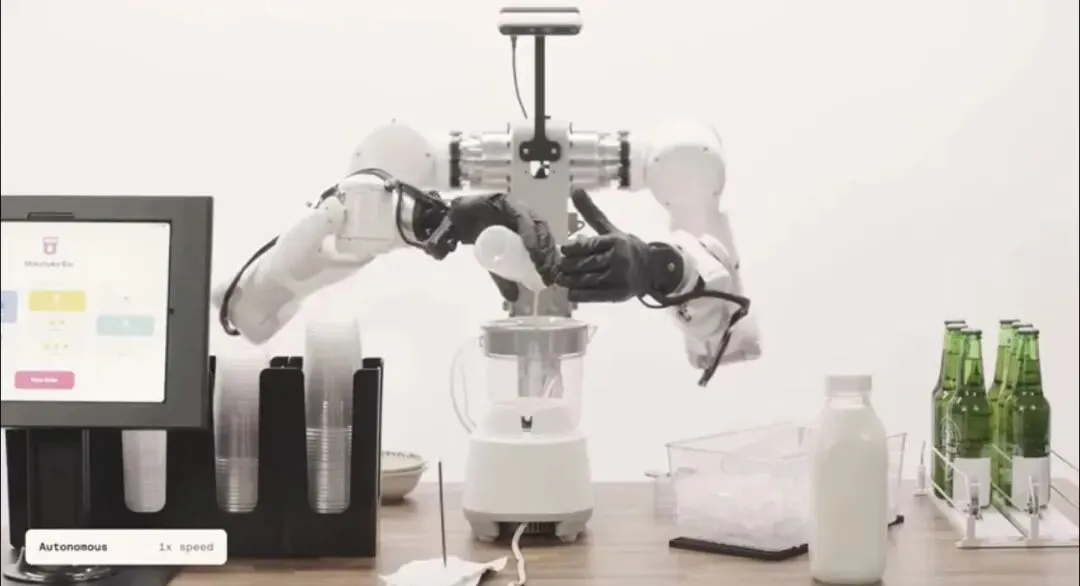
近日,机器人创业公司 Genesis AI 发布了其首个机器人基础模型系统 GENE-26.5。在一段演示视频中,机器人完成了一系列密集的灵巧操作,其中最引人注目的,是完成了一道中国家常菜——西红柿炒鸡蛋。这标志着机器人技术开始向人类最习以为常、却对机器而言异常复杂的日常家务任务发起挑战。

从跳舞搬箱到“下厨房”
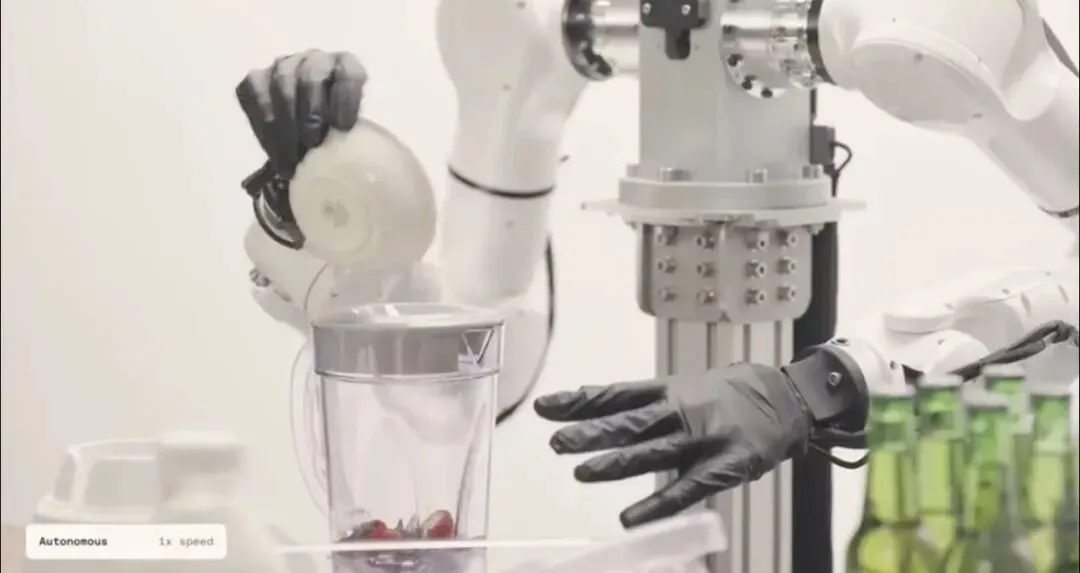
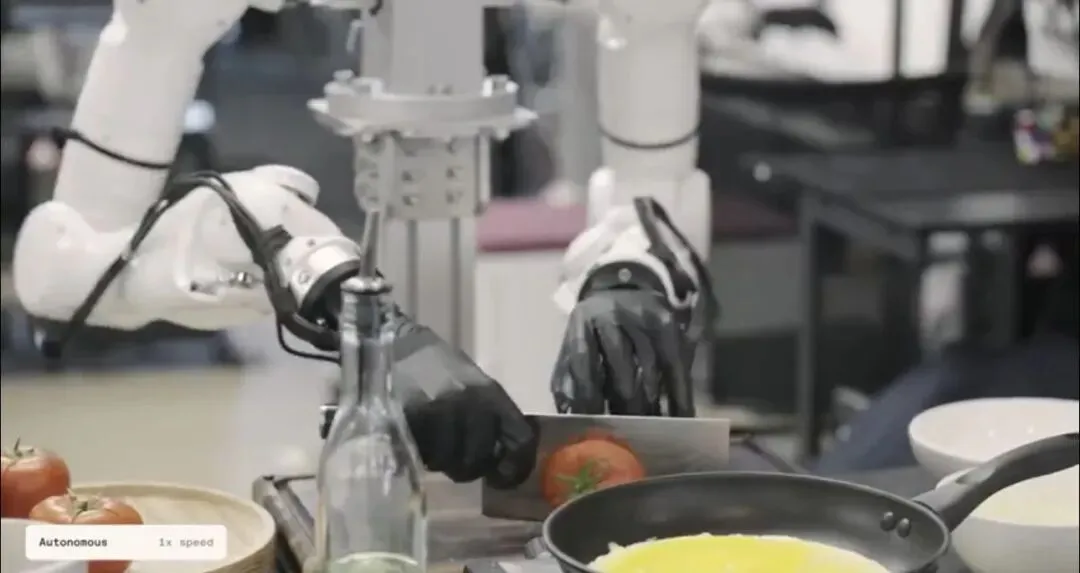
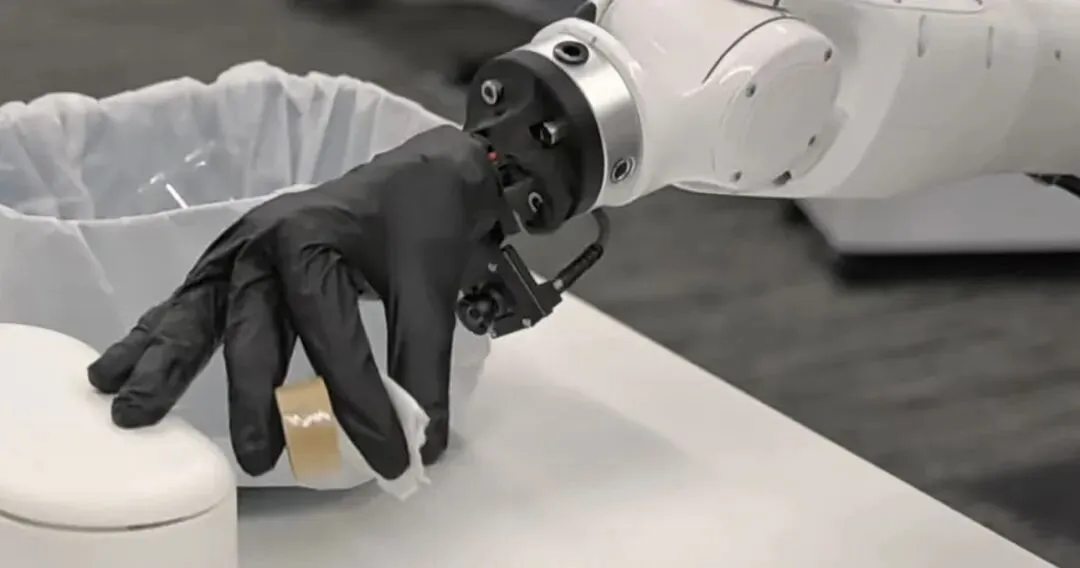
过去几年,人形机器人展示的能力多集中于跳舞、翻跟头、搬箱子等相对标准的动作。然而,公众对机器人的终极期待,往往是它能真正分担家务。Genesis AI 此次的演示将目标对准了厨房:机器人需要单手打鸡蛋、双手配合切番茄,并使用毛巾、盐磨、打蛋器、刀、铲子、平底锅等多种工具,在4分钟内完成包含20多个子任务的烹饪流程。
尤为关键的是,演示以1倍速全自主进行,未通过加速制造效果。尽管机器人整体速度约为人类的60%到70%,且最难的两个子任务(单手打蛋、用刀转移切好的番茄)成功率仅在50%-60%,但多数步骤成功率已达90%-95%。其中一个细节极具象征意义:机器人转移切好的番茄时,并非简单用刀铲起,而是模仿人类,用刀背与砧板形成支撑,再通过双手协同将番茄移出——这一动作涉及长时序规划、工具使用、易碎物体处理及不断变化的接触状态,展现了前所未有的类人操作能力。

GENE-26.5:数据驱动的通用操作模型
GENE-26.5 是一个面向机器人操作任务的多模态模型,输入包括语言、视觉、本体感知、触觉等信息,输出机器人动作轨迹。其核心在于数据驱动。模型训练数据主要来源于三类:捕捉高保真手部动作和触觉信号的“手套数据”、记录真实任务操作的第一视角视频,以及提供大规模物理互动覆盖的第三人称视频。Genesis AI 声称已与合作伙伴收集了超过20万小时的跨模态数据。
公司的技术路线强调“大规模人类操作数据预训练 + 少量机器人数据适配 + 仿真闭环评估”。仿真平台(Genesis)在此扮演了加速迭代和评估的角色,而非主要的训练数据来源。这意味着,模型通过真实数据学习物理世界的复杂性,再通过仿真高效测试和优化。
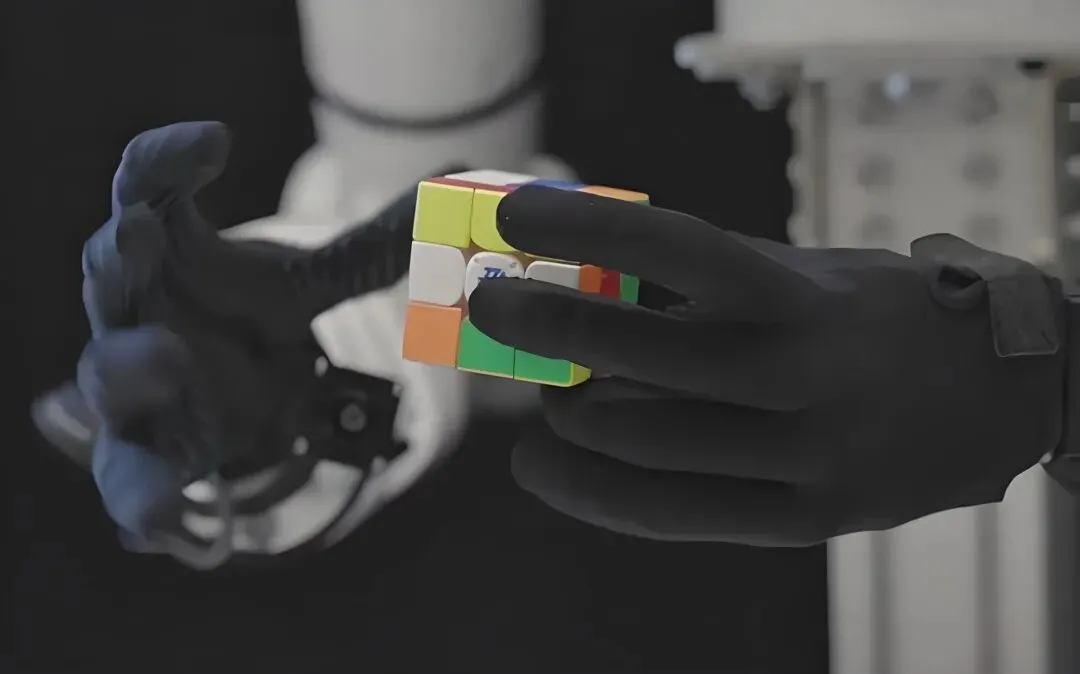
除了烹饪,演示还涵盖了实验室移液(涉及拧盖、操作离心机等精细步骤)、解魔方、整理线束、单手同时抓取多个物体以及弹钢琴等任务。这些任务共同展示了模型在多样化场景下的通用操作潜力。

“手”是关键:从外设到系统核心
Genesis AI 此次演示格外引人注目的,是其机器人灵巧手展现出的类人能力。视频中使用的灵巧手由中国公司“舞肌科技”提供,能够完成单手同时抓取四个不同尺寸物体等复杂操作。这背后是公司对“手”的重新定位:手不再是模型的简单外设,而是整个系统设计的关键一环。
公司正在与舞肌科技共同设计下一代“Genesis Hand 1.0”,目标是1:1匹配人手尺寸,拥有20个主动自由度,并覆盖软材料以模拟人类皮肤的触感。CEO周衔认为,要实现人类级操作,必须从模型、手、数据手套、控制栈到仿真器进行全栈整合设计,确保人类丰富的操作数据能够以最小损失迁移到机器人系统。

一家从物理引擎“长出来”的公司
Genesis AI 成立于2025年初,虽年轻却已获得1.05亿美元初始融资。其独特之处在于,它并非纯粹从机器人硬件或AI模型起步,而是源于其开源的“Genesis”通用物理仿真平台。该平台拥有从头重建的物理引擎,可模拟刚体、液体、气体、可变形物体等多种物理现象。
这种“生成式仿真”的基因,使公司具备自动化、规模化生成多样任务和训练场景的潜力,为应对开放世界的无限任务组合提供了基础。周衔判断,具身智能在实验室环境中,有望在一到两年内进入类似GPT-3.0的能力跃迁阶段,但要达到可安全、可靠大规模商业部署的成熟度(类比GPT-4.0甚至更高),可能还需要5年或更长时间。
Genesis AI 的演示并非宣告机器人已能完美胜任家务,但它清晰地指明了一条技术路径:通过海量人类数据预训练结合高效仿真评估,机器人的灵巧操作能力正被纳入类似大模型的训练范式。当机器人开始认真“学习”西红柿炒鸡蛋,人类与机器在物理世界协作共生的未来,似乎又近了一步。



媒体主理人|Kevin 138 8041 8738
