夜雨聆风
夜雨聆风在上一篇推文中,我们拆解了工业机器人通过“功能密钥”实现软件热插拔的微内核架构。当时留了一个伏笔:当系统确定要安装某个传感器(如 LTC 追踪系统)时,底层到底是如何把界面、多语言、底层驱动和信号一条龙布置到机器人大脑里的?
今天,官方安装脚本 LTC/install.cmd 曝光!让我们看看工业级的大型系统,是如何优雅地做“一键安装”的。
🛠️ 第二阶段源码:LTC 核心安装脚本
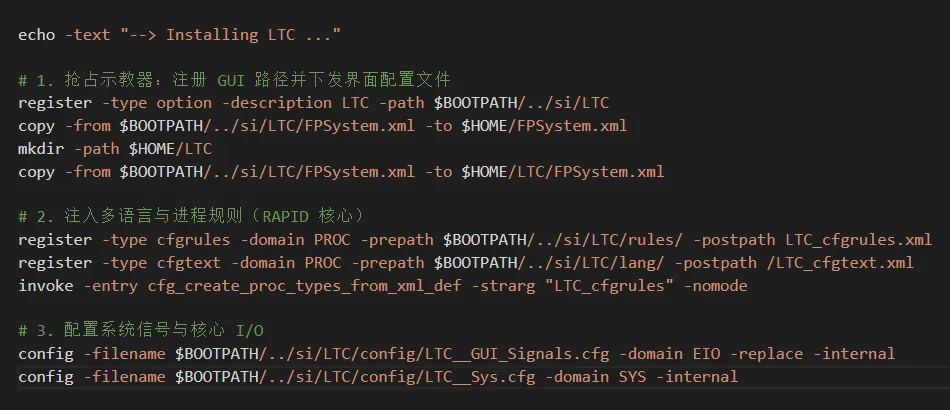
这段脚本主要分为三大核心战役:抢占示教器、注入多语言数据库、配置系统信号。
🔍 深度剖析:这三步在搞什么大动作?
第一步:动态刷新示教器(FlexPendant)界面
脚本一上来,就把 FPSystem.xml 复制到了机器人的 $HOME 目录。
为什么要做备份? 脚本里特意建了一个
/HOME/LTC文件夹又拷了一份。注释里写得很直白:“a backup copy in case an 'old' Backup is restored”(防止用户以后恢复了旧的系统备份,导致刚装的界面被冲掉)。工业级思考:永远不要信任用户的操作!在系统层面做好容灾备份,是工业级脚本的标配。
第二步:多语言与动态类型编译(最精妙的一步)
代码中出现了两句 register 和一句 invoke:
它先将控制规则(
cfgrules)和多语言文本(cfgtext)注册进系统的进程域(PROC)。紧接着,调用了一个系统级的方法:
invoke -entry cfg_create_proc_types_from_xml_def。内幕揭秘:机器人此时正在现场“刷机”!它根据刚刚注册的 XML 规则,动态在内存中生成新的数据类型和指令。不管你的机器人当前用的是中文、英文还是德文,系统会去
/lang/目录下自动匹配对应的语言包,绝不需要为了换个语言重新写一套程序。
第三步:打通硬件 I/O 脉络
最后,脚本修改了 EIO(输入输出域)和 SYS(系统域)等核心配置:
LTC__GUI_Signals.cfg:定义了界面上按钮和硬件传感器之间的通讯信号。LTC_bgTask.cfg:向系统注册一个后台任务(Background Task),让追踪算法在后台默默运行,不干扰前台机器人的正常轨迹运动。
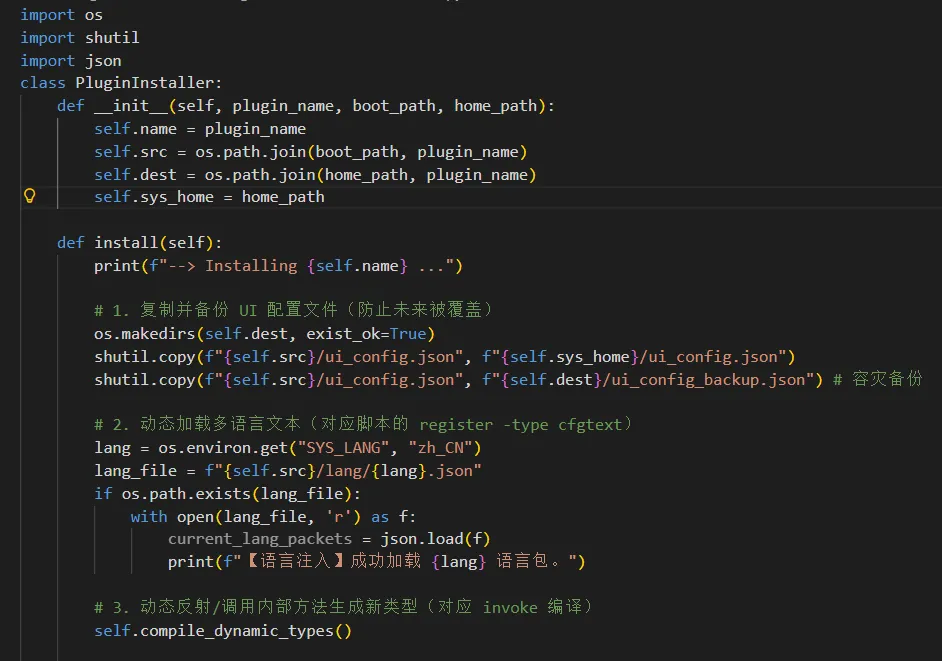
🚀 落地实战:如何把这套“工业级全自动安装”搬进我们的项目?
无论是做桌面软件插件、前端微应用,还是大后端系统,这种 “资源注册 -> 语言包映射 -> 进程注入 -> 后台任务挂载” 的流式安装,都是高级架构师的必修课。
我们用 Python 模拟一个类似的「全自动插件安装器」:
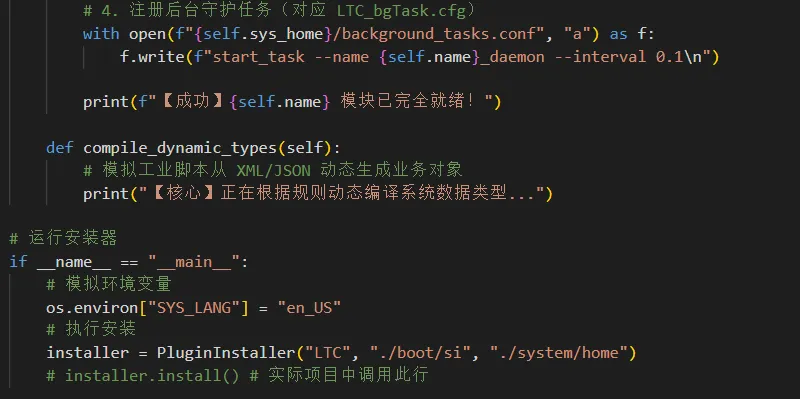
✍️ 总结
这段源自工业巨头的底层代码,给我们上了一堂生动的架构课:
别相信环境:做任何核心文件的覆盖前,先在安全区留好 Backup。
动静分离:界面布局(
XML)、多语言(lang)、核心逻辑(cfg)必须彻底解耦。元数据驱动:通过 XML 规则动态生成系统类型(
invoke),而不是把代码写死。
掌握了这一套,以后不管是做低代码平台、插件化架构,还是复杂的运维自动化,你的系统都能像工业机器人一样,稳定得令人发指!
结构目录(仅供参考):