
文档内容
12.1 杠杆(教学设计)
年级 八年级 授课时间
课题 12.1 杠杆
1. 能识别出杠杆,准确找出杠杆的五要素。知道杠杆的平衡条件,并能进
行相关计算。能对杠杆进行分类,选择合适的杠杆解决生活中的实际问题。
2. 辨析生活中的有关实例,了解杠杆是一种模型,初步认识模型建构在物
教学 理学中的作用。
目标 3. 经历探究杠杆平衡条件的过程,基于数据分析得出杠杆的平衡条件,培
养获取、处理信息和分析论证的科学探究能力。
4. 了解不同时期杠杆的应用,感受我国古代科技成就,增强民族自信心和
自豪。
作为“简单机械”的第1节,杠杆是学习滑轮和轮轴等简单机械的基础。本
节主要包括杠杆、杠杆的平衡条件、生活中的杠杆三部分内容。课程标准要求探
究并了解杠杆的平衡条件,因此本节的重点是引导学生完成探究杠杆平衡条件的
实验。教学中要在实验思路、进行实验和数据处理等方面给学生创设参与的机
教材
会,使他们加深体验。同时也要适当指导,毕竟独立完成整个实验过程对学生来
分析
说有些难度。
在本节的教学中,学生容易出现的难点是画杠杆的力臂。课堂上为了使学生
能较准确地画出力臂,教师有必要讲清力臂的概念,但不宜花费过多时间训练,
否则会影响本节重点的教学。
知识基础:在学习这一节之前,学生已经掌握了一些力学的基本概念,如
力、力的方向、力的作用点等。同时,他们也学习了简单的机械运动规律,如匀
速直线运动等。这些知识为学生学习本节课奠定了基础。
认知能力:在日常生活中,学生经常会接触到各种各样的杠杆,如门把手、
剪刀、钳子等。这些物品的使用让学生对杠杆有了一定的感性认知,他们能够初
步理解杠杆的基本作用,即能够改变力的方向或大小。然而,这种认知往往是零
学情分析
散的、表面的、不系统的,不了解其原理。
心理特征:八年级的学生正处于青春期,好奇心强,对新鲜事物充满兴趣。
他们喜欢动手实验,通过观察和实验来验证理论知识。同时,他们也具有一定的
逻辑思维能力,能够进行一些简单的推理和分析。因此,在教学过程中,教师可
以充分利用学生的这些特点,通过设计有趣的实验和互动活动来激发学生的学习
兴趣,提高他们的学习效果。
教学重点 引导学生完成探究杠杆平衡条件的实验。
教学难点 画杠杆的力臂。杠杆和支架、钩码、弹簧测力计、细线、羊角锤、木板、钉子、瓶起子、钢
教学 丝钳、指甲刀、托盘天平等。
器材 多媒体ppt,包含视频:《杠杆和杠杆的五要素》、《探究杠杆的平衡条
件》、《寻找生活中杠杆的应用》等。
教学过程
教师活动 学生活动
导入新课
观察图的跷跷板、羊角锤和开瓶器等机械,你认为这些机械有什么共同的
特点呢?
思考问题,进
入情境。
学习新课 一、杠杆
1. 什么是杠杆
【播放图片并提问】观察生活中使用的一些工具,这些工具在使用时,有
什么共同特点?
思考图中几种
情况中的共同
特点并回答,
【分析归纳给出杠杆的概念】 建立杠杆的概
它们的共同特征是:受到力的作用、能绕某一点转动、是一根硬棒。 念。
杠杆:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
【方法点拨】“硬棒”和“能绕着固定点转动”是杠杆的两个关键特征。
“硬”是指不考虑发生形变,是一种理想情况,杠杆是一种理想模型。理想模
型是人们分析物理问题的基础。
2. 描述杠杆的五个要素
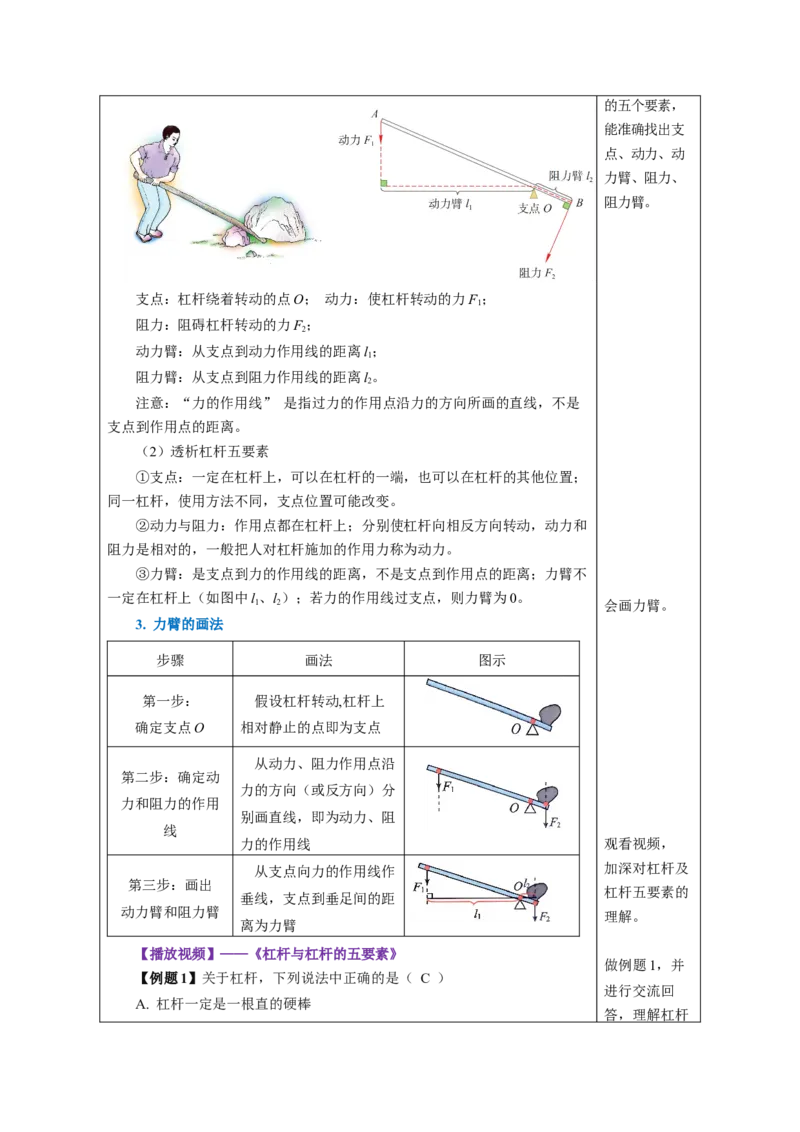
以用木棍撬石头为例进行分析讲解。
(1)描述杠杆特征的“五要素”
能识别出杠杆的五个要素,
能准确找出支
点、动力、动
力臂、阻力、
阻力臂。
支点:杠杆绕着转动的点O; 动力:使杠杆转动的力F;
1
阻力:阻碍杠杆转动的力F;
2
动力臂:从支点到动力作用线的距离l;
1
阻力臂:从支点到阻力作用线的距离l。
2
注意:“力的作用线” 是指过力的作用点沿力的方向所画的直线,不是
支点到作用点的距离。
(2)透析杠杆五要素
①支点:一定在杠杆上,可以在杠杆的一端,也可以在杠杆的其他位置;
同一杠杆,使用方法不同,支点位置可能改变。
②动力与阻力:作用点都在杠杆上;分别使杠杆向相反方向转动,动力和
阻力是相对的,一般把人对杠杆施加的作用力称为动力。
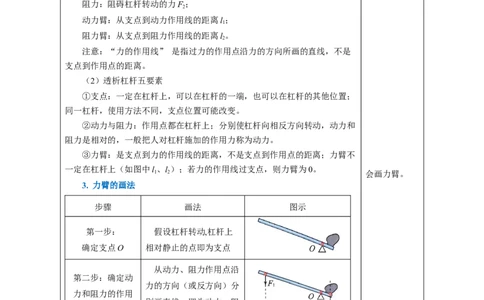
③力臂:是支点到力的作用线的距离,不是支点到作用点的距离;力臂不
一定在杠杆上(如图中l、l);若力的作用线过支点,则力臂为0。
1 2 会画力臂。
3. 力臂的画法
步骤 画法 图示
第一步: 假设杠杆转动,杠杆上
确定支点O 相对静止的点即为支点
从动力、阻力作用点沿
第二步:确定动
力的方向(或反方向)分
力和阻力的作用
别画直线,即为动力、阻
线
力的作用线 观看视频,
从支点向力的作用线作 加深对杠杆及
第三步:画出
杠杆五要素的
垂线,支点到垂足间的距
动力臂和阻力臂
理解。
离为力臂
【播放视频】——《杠杆与杠杆的五要素》
做例题1,并
【例题1】关于杠杆,下列说法中正确的是( C )
进行交流回
A. 杠杆一定是一根直的硬棒
答,理解杠杆B. 杠杆的支点一定在杠杆上,且在杠杆的中间位置 的概念。
C. 力臂可能在杠杆上,也可能不在杠杆上
D. 从支点到动力作用点的距离叫动力臂
【解析】AB. 杠杆,是一根硬棒,但不一定是直的,杠杆的支点一定在杠
杆上,不一定在杠杆的中间位置,所以A、B选项是错误的.
做例题2,识
C.力臂可能在杠杆上,也可能不在杠杆上,选项C正确.
别杠杆与力
D. 从支点到动力作用线的距离叫动力臂,所以D选项错误。
臂。
所以选C.
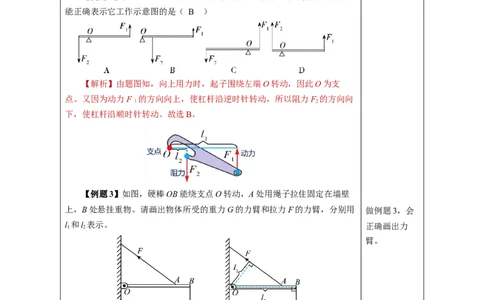
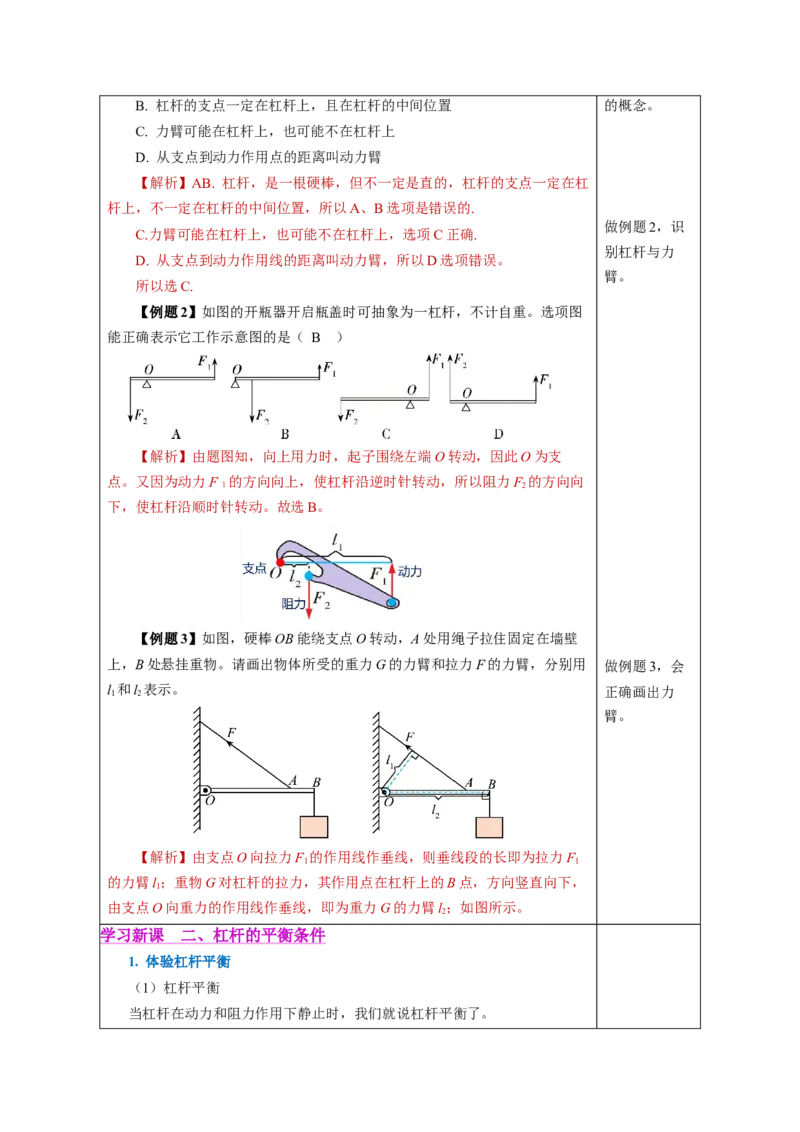
【例题2】如图的开瓶器开启瓶盖时可抽象为一杠杆,不计自重。选项图
能正确表示它工作示意图的是( B )
【解析】由题图知,向上用力时,起子围绕左端O转动,因此O为支
点。又因为动力F 的方向向上,使杠杆沿逆时针转动,所以阻力F 的方向向
1 2
下,使杠杆沿顺时针转动。故选B。
【例题3】如图,硬棒OB能绕支点O转动,A处用绳子拉住固定在墙壁
上,B处悬挂重物。请画出物体所受的重力G的力臂和拉力F的力臂,分别用 做例题3,会
l 和l 表示。 正确画出力
1 2
臂。
【解析】由支点O向拉力F 的作用线作垂线,则垂线段的长即为拉力F
1 1
的力臂l;重物G对杠杆的拉力,其作用点在杠杆上的B点,方向竖直向下,
1
由支点O向重力的作用线作垂线,即为重力G的力臂l;如图所示。
2
学习新课 二、杠杆的平衡条件
1. 体验杠杆平衡
(1)杠杆平衡
当杠杆在动力和阻力作用下静止时,我们就说杠杆平衡了。(2)体验杠杆平衡
【想一想】前面学习过,如果作用在物体上的几个力相互平衡,物体就处于
平衡状态(如二力平衡状态)。
当杠杆在动力和阻力作用下静止时,与二力平衡的情况是不同的,那么,影 做一做,体验
响杠杆平衡的因素还有哪些呢? 影响杠杆平衡
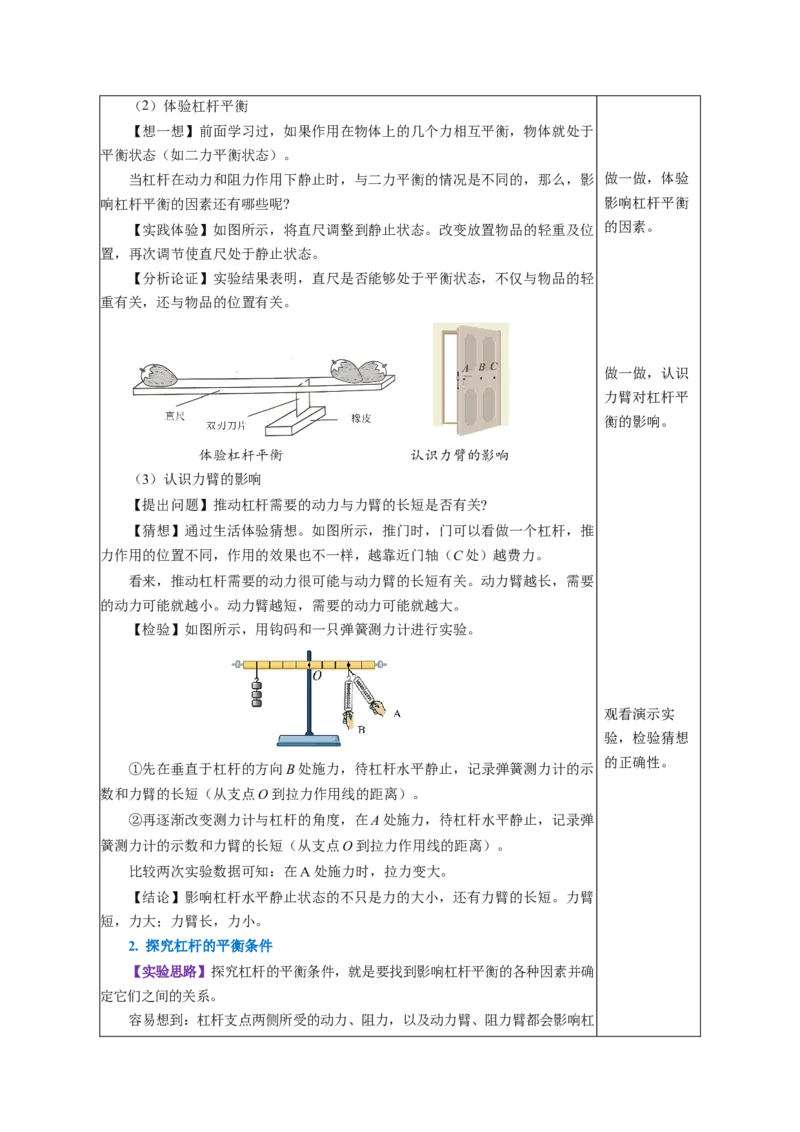
【实践体验】如图所示,将直尺调整到静止状态。改变放置物品的轻重及位 的因素。
置,再次调节使直尺处于静止状态。
【分析论证】实验结果表明,直尺是否能够处于平衡状态,不仅与物品的轻
重有关,还与物品的位置有关。
做一做,认识
力臂对杠杆平
衡的影响。
体验杠杆平衡 认识力臂的影响
(3)认识力臂的影响
【提出问题】推动杠杆需要的动力与力臂的长短是否有关?
【猜想】通过生活体验猜想。如图所示,推门时,门可以看做一个杠杆,推
力作用的位置不同,作用的效果也不一样,越靠近门轴(C处)越费力。
看来,推动杠杆需要的动力很可能与动力臂的长短有关。动力臂越长,需要
的动力可能就越小。动力臂越短,需要的动力可能就越大。
【检验】如图所示,用钩码和一只弹簧测力计进行实验。
观看演示实
验,检验猜想
的正确性。
①先在垂直于杠杆的方向B处施力,待杠杆水平静止,记录弹簧测力计的示
数和力臂的长短(从支点O到拉力作用线的距离)。
②再逐渐改变测力计与杠杆的角度,在A处施力,待杠杆水平静止,记录弹
簧测力计的示数和力臂的长短(从支点O到拉力作用线的距离)。
比较两次实验数据可知:在A处施力时,拉力变大。
【结论】影响杠杆水平静止状态的不只是力的大小,还有力臂的长短。力臂
短,力大;力臂长,力小。
2. 探究杠杆的平衡条件
【实验思路】探究杠杆的平衡条件,就是要找到影响杠杆平衡的各种因素并确
定它们之间的关系。
容易想到:杠杆支点两侧所受的动力、阻力,以及动力臂、阻力臂都会影响杠杆的平衡,所以应该找出这四个量之间的关系。
我们可以先保持杠杆一侧的两个量不变,如左侧的阻力和阻力臂,改变另一侧
的两个量,即右侧的动力和动力臂。然后再保持右侧的动力和动力臂不变,改变左
侧的阻力和阻力臂。综合分析后找出动力、动力臂、阻力、阻力臂这四个量之间的 根据实验思
关系。 路,设计实
【实验过程】 验,选择实验
把杠杆安装在支架上,使杠杆保持水平并静止,达到平衡状态。 器材、设计数
【讲解】使杠杆保持水平并静止的目的:一是使杠杆的重心在支点,以消除 据记录表格。
杠杆自身重力对实验的影响;二是便于直接读出力臂。
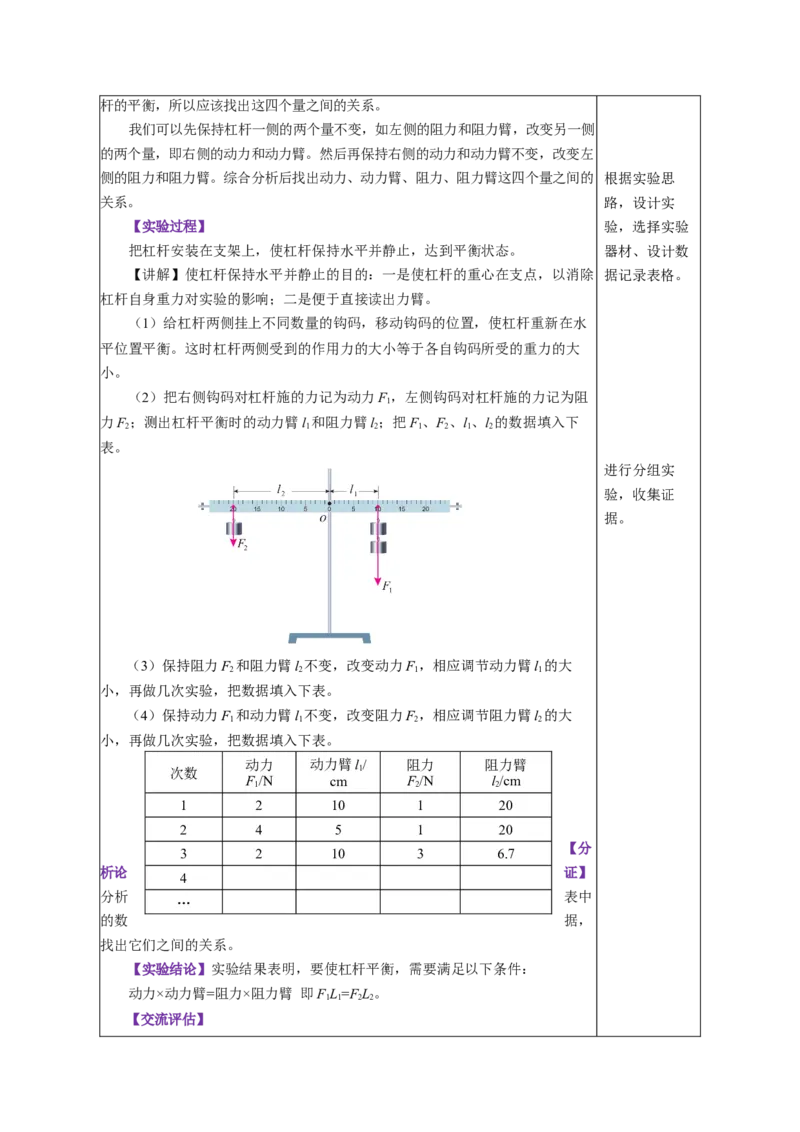
(1)给杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水
平位置平衡。这时杠杆两侧受到的作用力的大小等于各自钩码所受的重力的大
小。
(2)把右侧钩码对杠杆施的力记为动力F,左侧钩码对杠杆施的力记为阻
1
力F;测出杠杆平衡时的动力臂l 和阻力臂l;把F、F、l、l 的数据填入下
2 1 2 1 2 1 2
表。
进行分组实
验,收集证
据。
(3)保持阻力F 和阻力臂l 不变,改变动力F,相应调节动力臂l 的大
2 2 1 1
小,再做几次实验,把数据填入下表。
(4)保持动力F 和动力臂l 不变,改变阻力F,相应调节阻力臂l 的大
1 1 2 2
小,再做几次实验,把数据填入下表。
动力 动力臂l/ 阻力 阻力臂
次数 1
F/N cm F/N l/cm
1 2 2
1 2 10 1 20
2 4 5 1 20
【分
3 2 10 3 6.7
析论 证】
4
分析 表中
…
的数 据,
找出它们之间的关系。
【实验结论】实验结果表明,要使杠杆平衡,需要满足以下条件:
动力×动力臂=阻力×阻力臂 即FL=FL。
1 1 2 2
【交流评估】【问题】(1)多次测量获得多组实验数据的目的是什么?
(2)测量时能否调节平衡螺母?
(3)使用弹簧测力计进行实验时应该注意哪些事项? 分析论证,归
纳得出杠杆的
【分析归纳】
平衡条件。
(1)多次测量获得多组实验数据的目的是避免偶然性,获得普遍性的结
论。
(2)在实验前要调节杠杆两端的平衡螺母,使杠杆水平平衡。挂钩码后,
不能再调节平衡螺母。
进行交流评
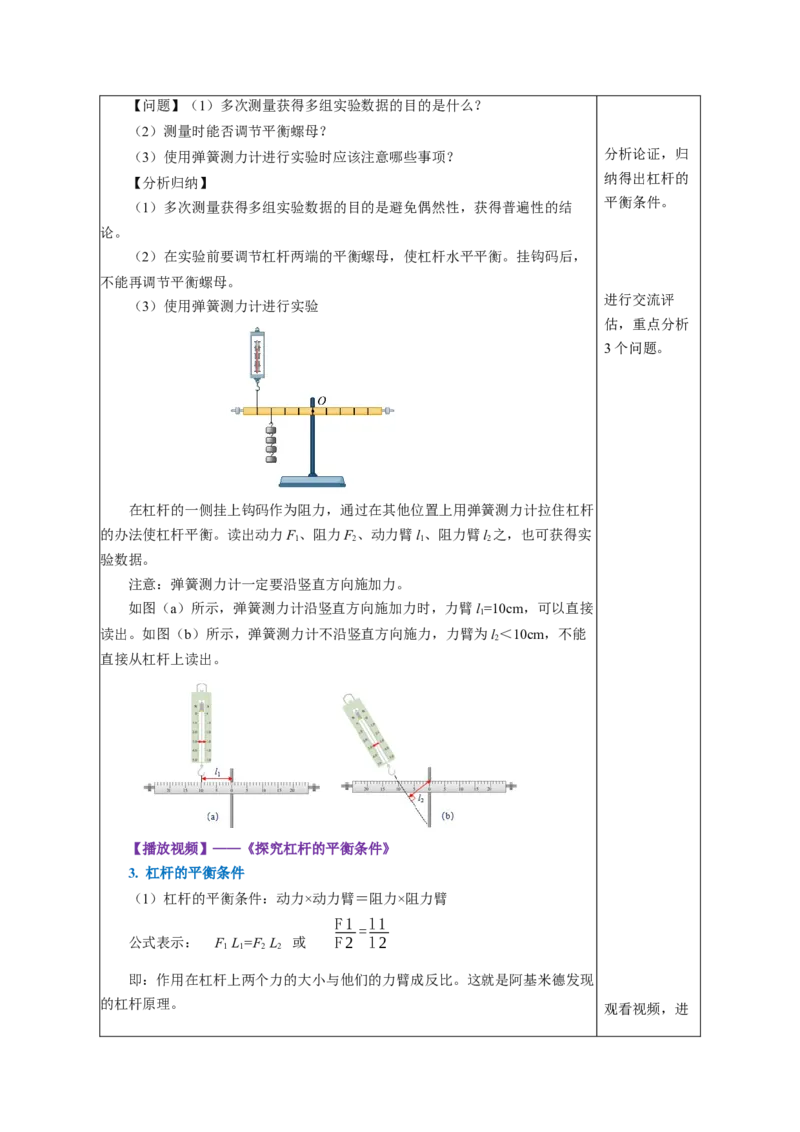
(3)使用弹簧测力计进行实验
估,重点分析
3个问题。
在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆
的办法使杠杆平衡。读出动力F、阻力F、动力臂l、阻力臂l 之,也可获得实
1 2 1 2
验数据。
注意:弹簧测力计一定要沿竖直方向施加力。
如图(a)所示,弹簧测力计沿竖直方向施加力时,力臂l=10cm,可以直接
1
读出。如图(b)所示,弹簧测力计不沿竖直方向施力,力臂为l<10cm,不能
2
直接从杠杆上读出。
【播放视频】——《探究杠杆的平衡条件》
3. 杠杆的平衡条件
(1)杠杆的平衡条件:动力×动力臂=阻力×阻力臂
F1 l1
=
公式表示: F L=F L 或 F2 l2
1 1 2 2
即:作用在杠杆上两个力的大小与他们的力臂成反比。这就是阿基米德发现
的杠杆原理。
观看视频,进(2)注意: 一步理解探究
①应用公式计算时,单位要统一,即动力和阻力的单位要用牛(N),动力 过程。
臂和阻力臂的单位要相同(cm或m)。
记住杠杆的平
②杠杆是否平衡,取决于力和力臂的乘积;乘积相等就平衡;否则沿着乘积
衡条件,会用
大的那端转动。
语言和数学表
4. 想想议议
达式描述。
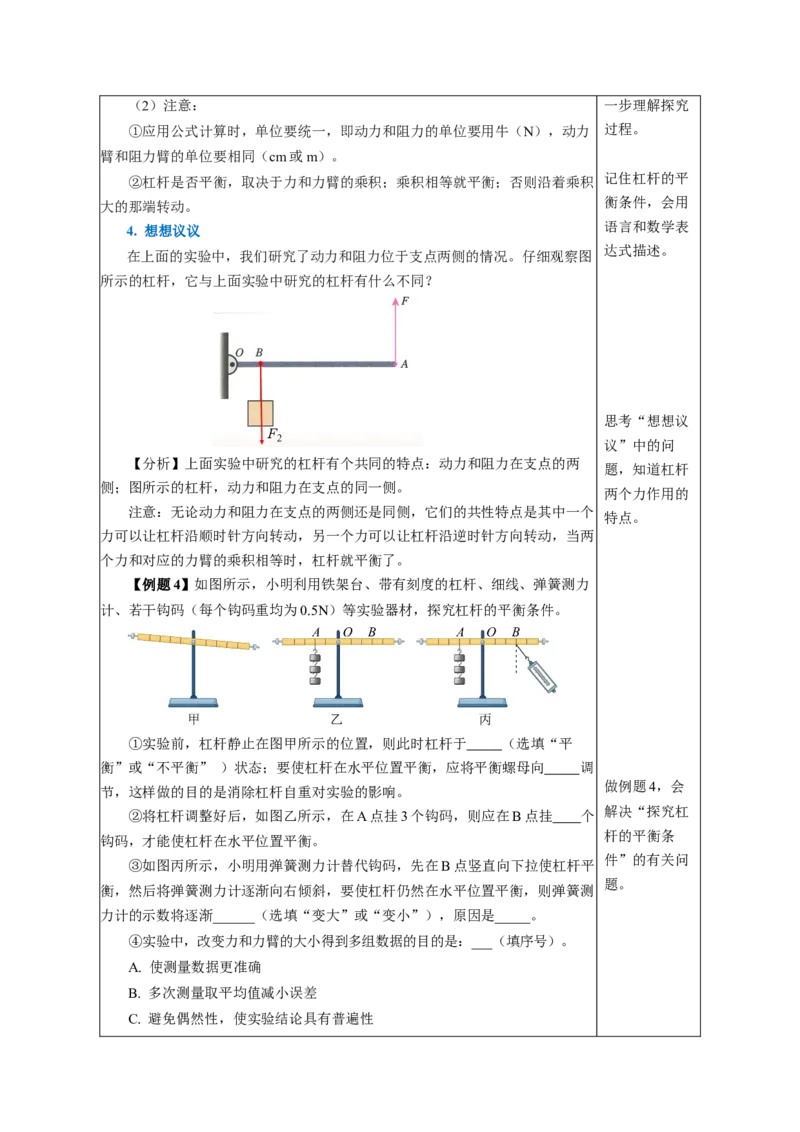
在上面的实验中,我们研究了动力和阻力位于支点两侧的情况。仔细观察图
所示的杠杆,它与上面实验中研究的杠杆有什么不同?
思考“想想议
议”中的问
【分析】上面实验中研究的杠杆有个共同的特点:动力和阻力在支点的两
题,知道杠杆
侧;图所示的杠杆,动力和阻力在支点的同一侧。
两个力作用的
注意:无论动力和阻力在支点的两侧还是同侧,它们的共性特点是其中一个
特点。
力可以让杠杆沿顺时针方向转动,另一个力可以让杠杆沿逆时针方向转动,当两
个力和对应的力臂的乘积相等时,杠杆就平衡了。
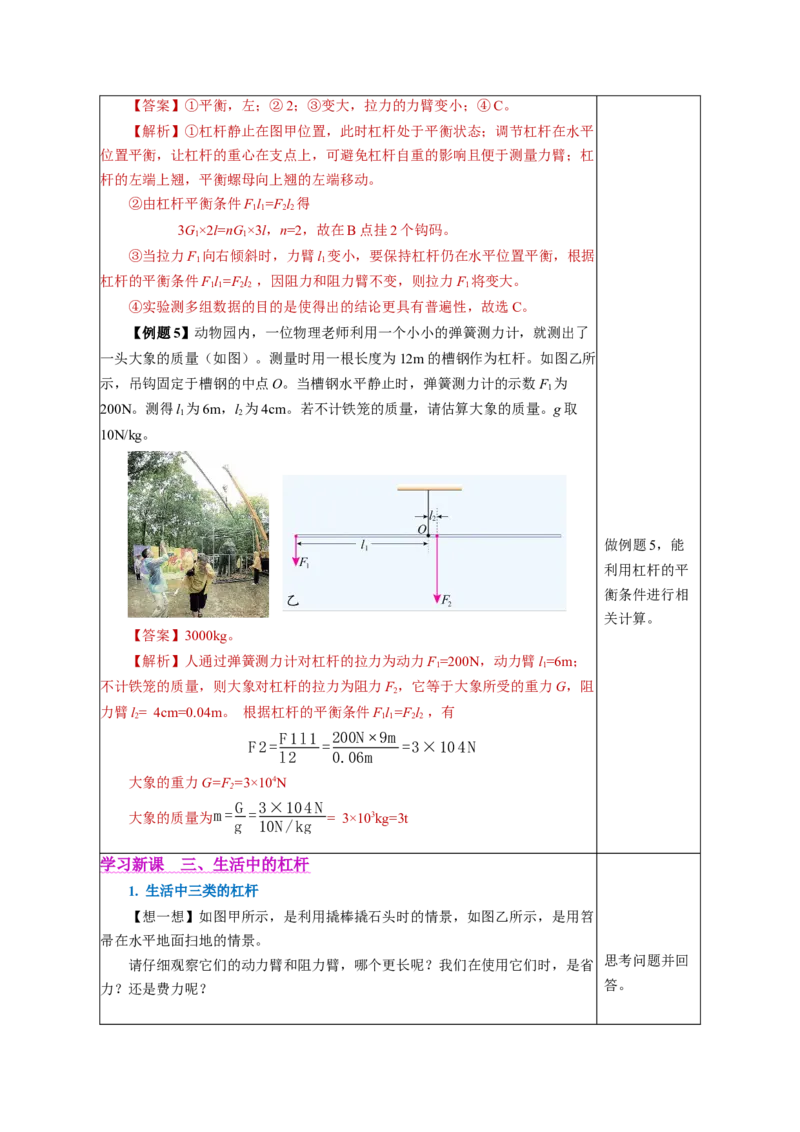
【例题4】如图所示,小明利用铁架台、带有刻度的杠杆、细线、弹簧测力
计、若干钩码(每个钩码重均为0.5N)等实验器材,探究杠杆的平衡条件。
①实验前,杠杆静止在图甲所示的位置,则此时杠杆于 (选填“平
衡”或“不平衡” )状态;要使杠杆在水平位置平衡,应将平衡螺母向 调
做例题4,会
节,这样做的目的是消除杠杆自重对实验的影响。
解决“探究杠
②将杠杆调整好后,如图乙所示,在A点挂3个钩码,则应在B点挂 个
杆的平衡条
钩码,才能使杠杆在水平位置平衡。
件”的有关问
③如图丙所示,小明用弹簧测力计替代钩码,先在B点竖直向下拉使杠杆平
题。
衡,然后将弹簧测力计逐渐向右倾斜,要使杠杆仍然在水平位置平衡,则弹簧测
力计的示数将逐渐______(选填“变大”或“变小”),原因是_____。
④实验中,改变力和力臂的大小得到多组数据的目的是:___(填序号)。
A. 使测量数据更准确
B. 多次测量取平均值减小误差
C. 避免偶然性,使实验结论具有普遍性【答案】①平衡,左;②2;③变大,拉力的力臂变小;④C。
【解析】①杠杆静止在图甲位置,此时杠杆处于平衡状态;调节杠杆在水平
位置平衡,让杠杆的重心在支点上,可避免杠杆自重的影响且便于测量力臂;杠
杆的左端上翘,平衡螺母向上翘的左端移动。
②由杠杆平衡条件Fl=Fl 得
11 22
3G×2l=nG×3l,n=2,故在B点挂2个钩码。
1 1
③当拉力F 向右倾斜时,力臂l 变小,要保持杠杆仍在水平位置平衡,根据
1 1
杠杆的平衡条件Fl=Fl ,因阻力和阻力臂不变,则拉力F 将变大。
11 22 1
④实验测多组数据的目的是使得出的结论更具有普遍性,故选C。
【例题5】动物园内,一位物理老师利用一个小小的弹簧测力计,就测出了
一头大象的质量(如图)。测量时用一根长度为12m的槽钢作为杠杆。如图乙所
示,吊钩固定于槽钢的中点O。当槽钢水平静止时,弹簧测力计的示数F 为
1
200N。测得l 为6m,l 为4cm。若不计铁笼的质量,请估算大象的质量。g取
1 2
10N/kg。
做例题5,能
利用杠杆的平
衡条件进行相
关计算。
【答案】3000kg。
【解析】人通过弹簧测力计对杠杆的拉力为动力F=200N,动力臂l=6m;
1 1
不计铁笼的质量,则大象对杠杆的拉力为阻力F,它等于大象所受的重力G,阻
2
力臂l= 4cm=0.04m。 根据杠杆的平衡条件Fl=Fl ,有
2 11 22
F1l1 200N×9m
F2= = =3×104N
l2 0.06m
大象的重力G=F =3×104N
2
G 3×104N
大象的质量为m= = = 3×103kg=3t
g 10N/kg
学习新课 三、生活中的杠杆
1. 生活中三类的杠杆
【想一想】如图甲所示,是利用撬棒撬石头时的情景,如图乙所示,是用笤
帚在水平地面扫地的情景。
思考问题并回
请仔细观察它们的动力臂和阻力臂,哪个更长呢?我们在使用它们时,是省
答。
力?还是费力呢?甲 乙
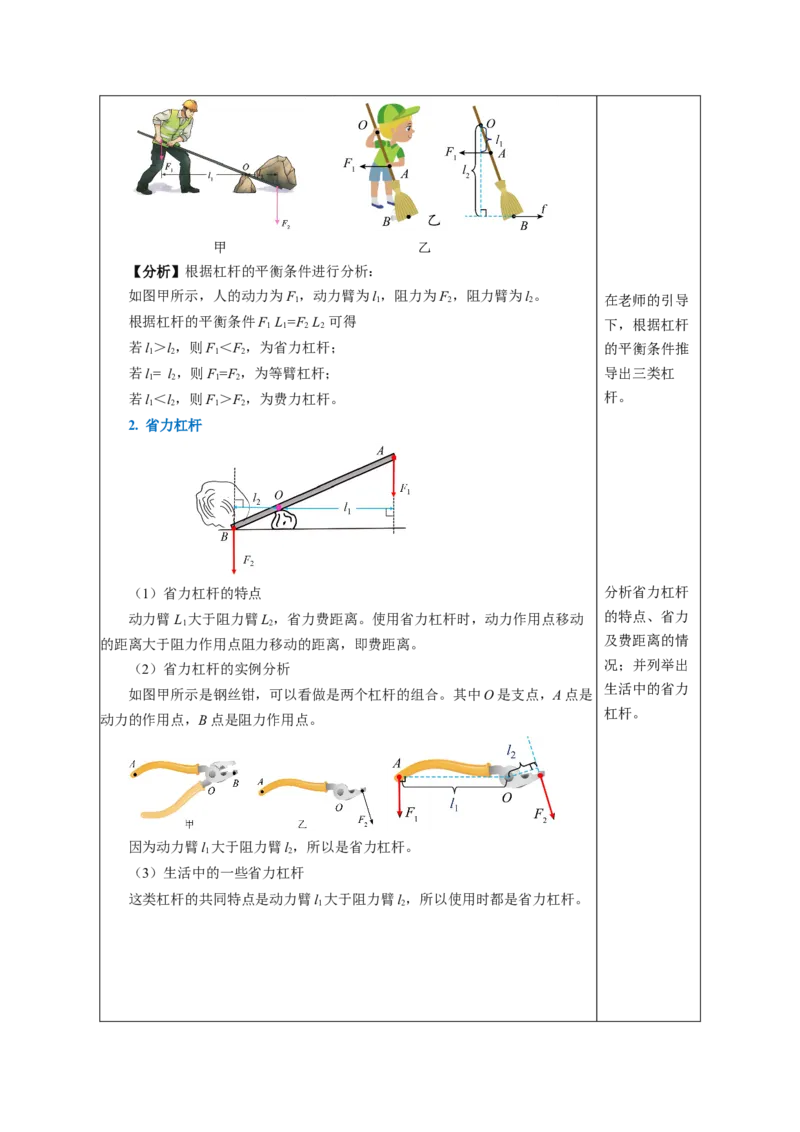
【分析】根据杠杆的平衡条件进行分析:
如图甲所示,人的动力为F
1
,动力臂为l
1
,阻力为F
2
,阻力臂为l
2
。
在老师的引导
根据杠杆的平衡条件F 1 L 1 =F 2 L 2 可得 下,根据杠杆
若l>l,则F<F,为省力杠杆; 的平衡条件推
1 2 1 2
若l= l,则F=F,为等臂杠杆; 导出三类杠
1 2 1 2
若l<l,则F>F,为费力杠杆。 杆。
1 2 1 2
2. 省力杠杆
(1)省力杠杆的特点 分析省力杠杆
动力臂L 大于阻力臂L,省力费距离。使用省力杠杆时,动力作用点移动 的特点、省力
1 2
的距离大于阻力作用点阻力移动的距离,即费距离。 及费距离的情
(2)省力杠杆的实例分析 况;并列举出
生活中的省力
如图甲所示是钢丝钳,可以看做是两个杠杆的组合。其中O是支点,A点是
杠杆。
动力的作用点,B点是阻力作用点。
因为动力臂l 大于阻力臂l,所以是省力杠杆。
1 2
(3)生活中的一些省力杠杆
这类杠杆的共同特点是动力臂l 大于阻力臂l,所以使用时都是省力杠杆。
1 2分析费力杠杆
的特点、费力
及省距离的情
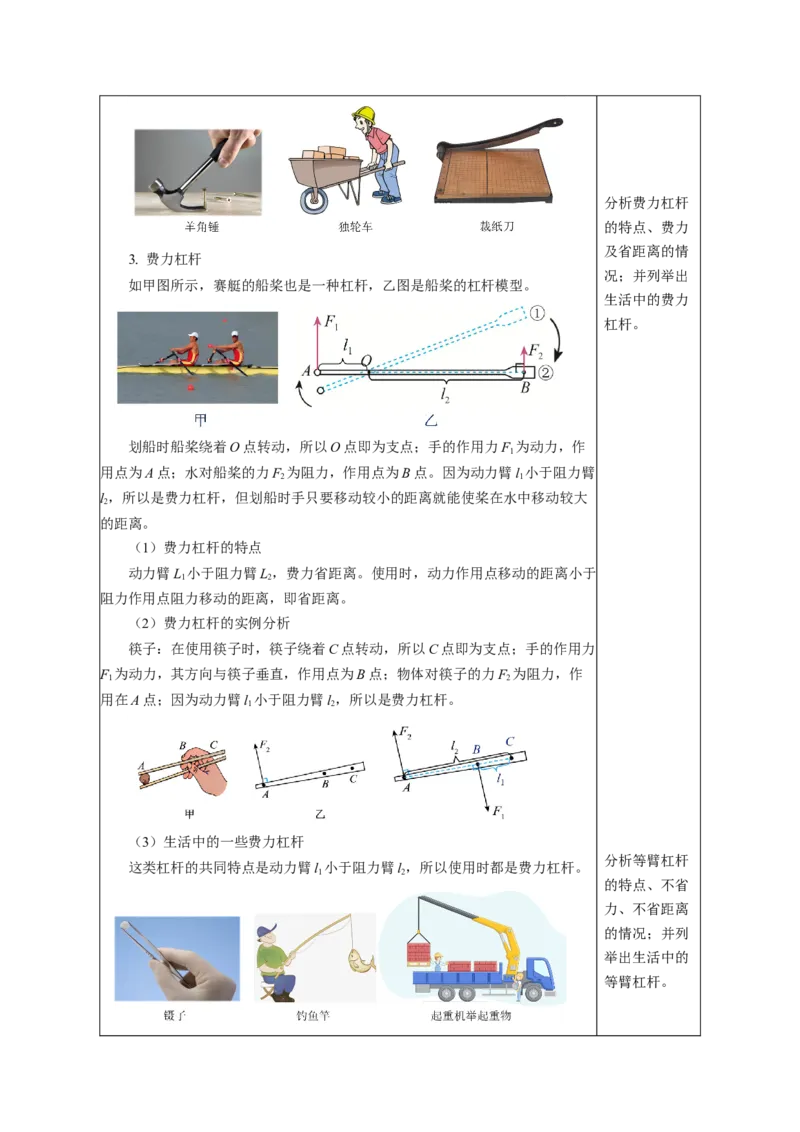
3. 费力杠杆
况;并列举出
如甲图所示,赛艇的船桨也是一种杠杆,乙图是船桨的杠杆模型。
生活中的费力
杠杆。
划船时船桨绕着O点转动,所以O点即为支点;手的作用力F 为动力,作
1
用点为A点;水对船桨的力F 为阻力,作用点为B点。因为动力臂l 小于阻力臂
2 1
l,所以是费力杠杆,但划船时手只要移动较小的距离就能使桨在水中移动较大
2
的距离。
(1)费力杠杆的特点
动力臂L 小于阻力臂L,费力省距离。使用时,动力作用点移动的距离小于
1 2
阻力作用点阻力移动的距离,即省距离。
(2)费力杠杆的实例分析
筷子:在使用筷子时,筷子绕着C点转动,所以C点即为支点;手的作用力
F 为动力,其方向与筷子垂直,作用点为B点;物体对筷子的力F 为阻力,作
1 2
用在A点;因为动力臂l 小于阻力臂l,所以是费力杠杆。
1 2
(3)生活中的一些费力杠杆
分析等臂杠杆
这类杠杆的共同特点是动力臂l 小于阻力臂l,所以使用时都是费力杠杆。
1 2
的特点、不省
力、不省距离
的情况;并列
举出生活中的
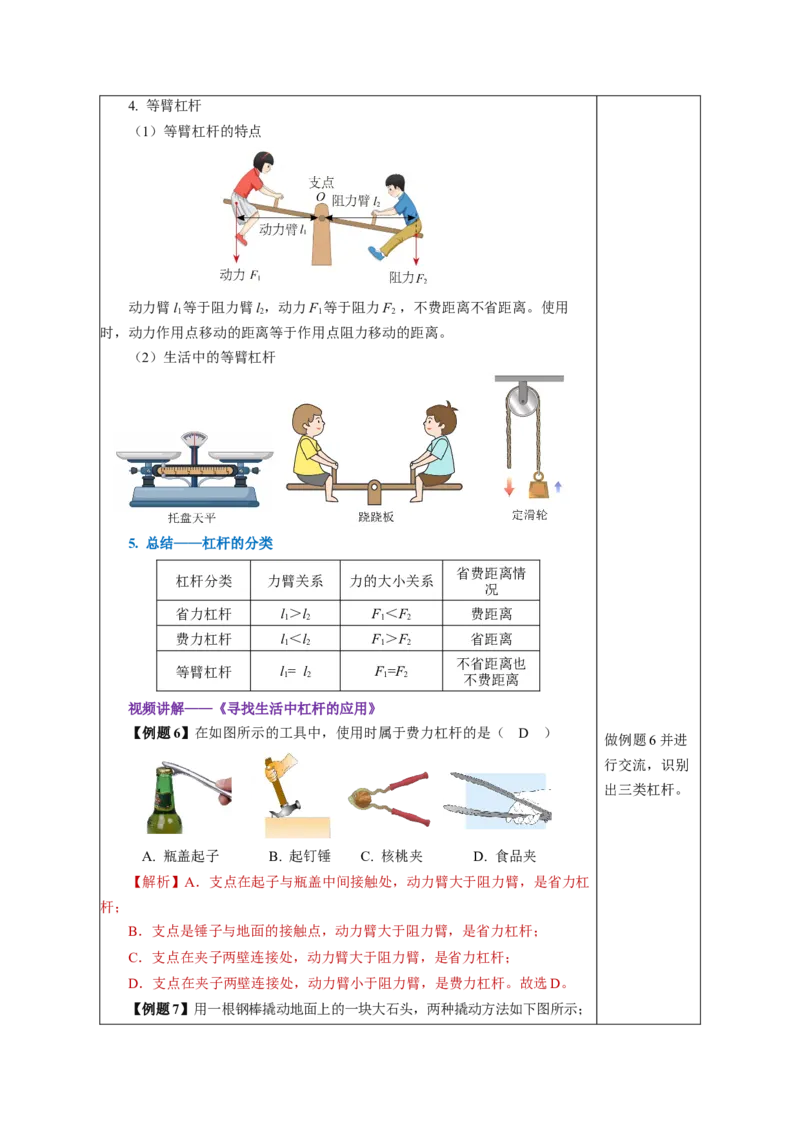
等臂杠杆。4. 等臂杠杆
(1)等臂杠杆的特点
动力臂l 等于阻力臂l,动力F 等于阻力F ,不费距离不省距离。使用
1 2 1 2
时,动力作用点移动的距离等于作用点阻力移动的距离。
(2)生活中的等臂杠杆
5. 总结——杠杆的分类
省费距离情
杠杆分类 力臂关系 力的大小关系
况
省力杠杆 l>l F<F 费距离
1 2 1 2
费力杠杆 l<l F>F 省距离
1 2 1 2
不省距离也
等臂杠杆 l= l F=F
1 2 1 2 不费距离
视频讲解——《寻找生活中杠杆的应用》
【例题6】在如图所示的工具中,使用时属于费力杠杆的是( D )
做例题6并进
行交流,识别
出三类杠杆。
A. 瓶盖起子 B. 起钉锤 C. 核桃夹 D. 食品夹
【解析】A.支点在起子与瓶盖中间接触处,动力臂大于阻力臂,是省力杠
杆;
B.支点是锤子与地面的接触点,动力臂大于阻力臂,是省力杠杆;
C.支点在夹子两壁连接处,动力臂大于阻力臂,是省力杠杆;
D.支点在夹子两壁连接处,动力臂小于阻力臂,是费力杠杆。故选D。
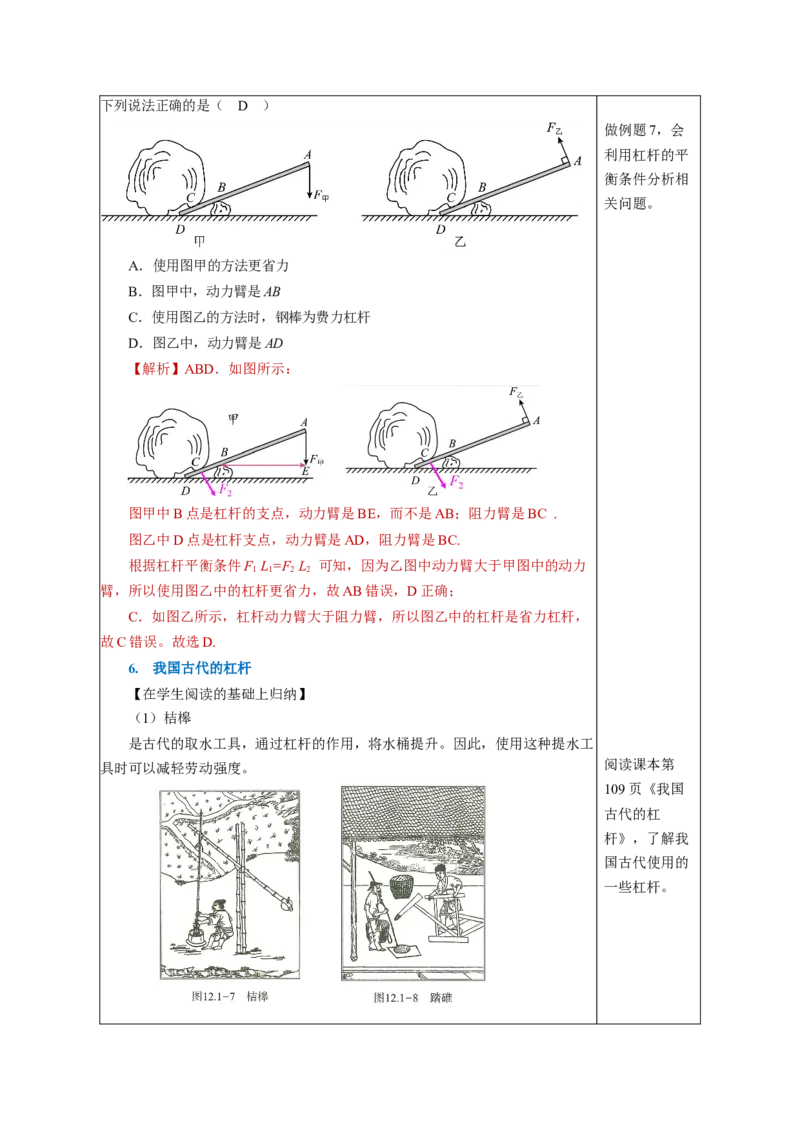
【例题7】用一根钢棒撬动地面上的一块大石头,两种撬动方法如下图所示;下列说法正确的是( D )
做例题7,会
利用杠杆的平
衡条件分析相
关问题。
A.使用图甲的方法更省力
B.图甲中,动力臂是AB
C.使用图乙的方法时,钢棒为费力杠杆
D.图乙中,动力臂是AD
【解析】ABD.如图所示:
图甲中B点是杠杆的支点,动力臂是BE,而不是AB;阻力臂是BC .
图乙中D点是杠杆支点,动力臂是AD,阻力臂是BC.
根据杠杆平衡条件F L=F L 可知,因为乙图中动力臂大于甲图中的动力
1 1 2 2
臂,所以使用图乙中的杠杆更省力,故AB错误,D正确;
C.如图乙所示,杠杆动力臂大于阻力臂,所以图乙中的杠杆是省力杠杆,
故C错误。故选D.
6. 我国古代的杠杆
【在学生阅读的基础上归纳】
(1)桔槔
是古代的取水工具,通过杠杆的作用,将水桶提升。因此,使用这种提水工
具时可以减轻劳动强度。 阅读课本第
109页《我国
古代的杠
杆》,了解我
国古代使用的
一些杠杆。(2)踏碓
踏碓是古代的舂米工具,由杵臼演变而来,也运用了杠杆原理。
(3)水碓
在踏碓的基础上,人们又发明了利用水力的水碓,水碓的原动轮是一个大型
卧式水轮,轮的轴上装有一排互相错开的拨板,用以拨动碓杆,碓杆的一端装有
碓头,水轮转动时,就使几个碓头相继舂米。它不仅用于粮食加工,还用于舂碎
香料、陶土等。
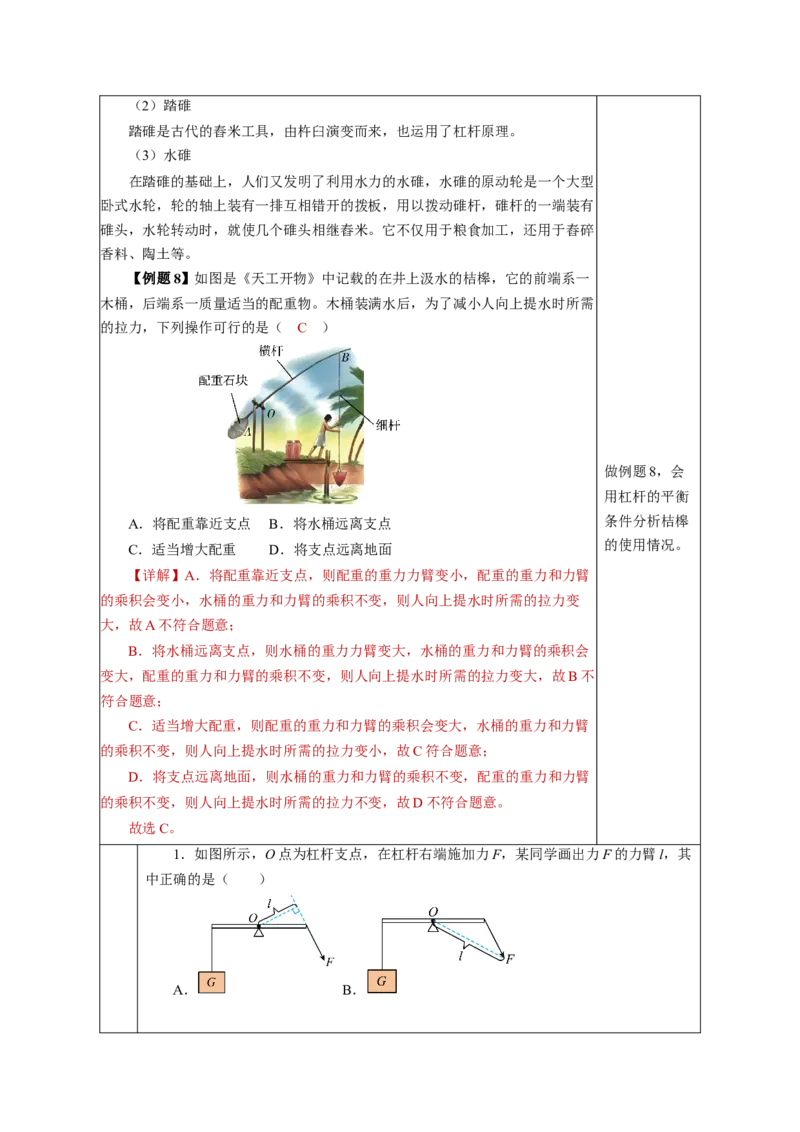
【例题8】如图是《天工开物》中记载的在井上汲水的桔槔,它的前端系一
木桶,后端系一质量适当的配重物。木桶装满水后,为了减小人向上提水时所需
的拉力,下列操作可行的是( C )
做例题8,会
用杠杆的平衡
A.将配重靠近支点 B.将水桶远离支点 条件分析桔槔
的使用情况。
C.适当增大配重 D.将支点远离地面
【详解】A.将配重靠近支点,则配重的重力力臂变小,配重的重力和力臂
的乘积会变小,水桶的重力和力臂的乘积不变,则人向上提水时所需的拉力变
大,故A不符合题意;
B.将水桶远离支点,则水桶的重力力臂变大,水桶的重力和力臂的乘积会
变大,配重的重力和力臂的乘积不变,则人向上提水时所需的拉力变大,故B不
符合题意;
C.适当增大配重,则配重的重力和力臂的乘积会变大,水桶的重力和力臂
的乘积不变,则人向上提水时所需的拉力变小,故C符合题意;
D.将支点远离地面,则水桶的重力和力臂的乘积不变,配重的重力和力臂
的乘积不变,则人向上提水时所需的拉力不变,故D不符合题意。
故选C。
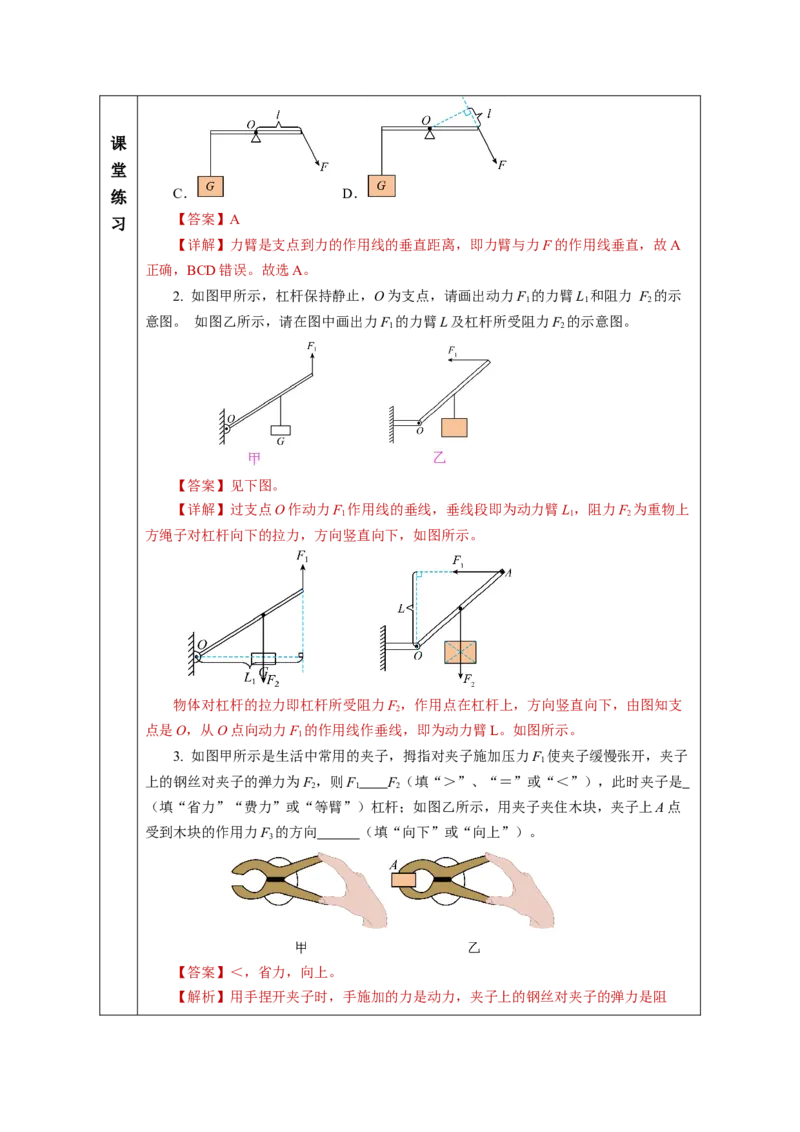
1.如图所示,O点为杠杆支点,在杠杆右端施加力F,某同学画出力F的力臂l,其
中正确的是( )
A. B.课
堂
练 C. D.
习 【答案】A
【详解】力臂是支点到力的作用线的垂直距离,即力臂与力F的作用线垂直,故A
正确,BCD错误。故选A。
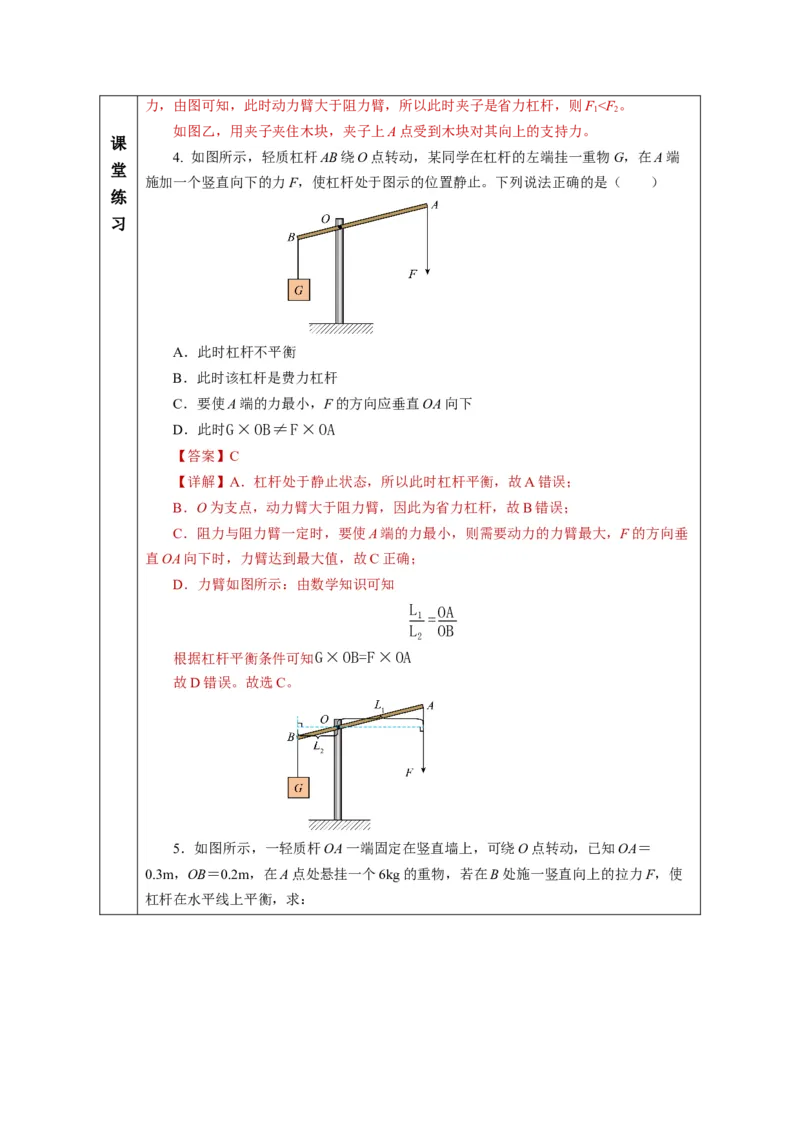
2. 如图甲所示,杠杆保持静止,O为支点,请画出动力F 的力臂L 和阻力 F 的示
1 1 2
意图。 如图乙所示,请在图中画出力F 的力臂L及杠杆所受阻力F 的示意图。
1 2
【答案】见下图。
【详解】过支点O作动力F 作用线的垂线,垂线段即为动力臂L,阻力F 为重物上
1 1 2
方绳子对杠杆向下的拉力,方向竖直向下,如图所示。
物体对杠杆的拉力即杠杆所受阻力F,作用点在杠杆上,方向竖直向下,由图知支
2
点是O,从O点向动力F 的作用线作垂线,即为动力臂L。如图所示。
1
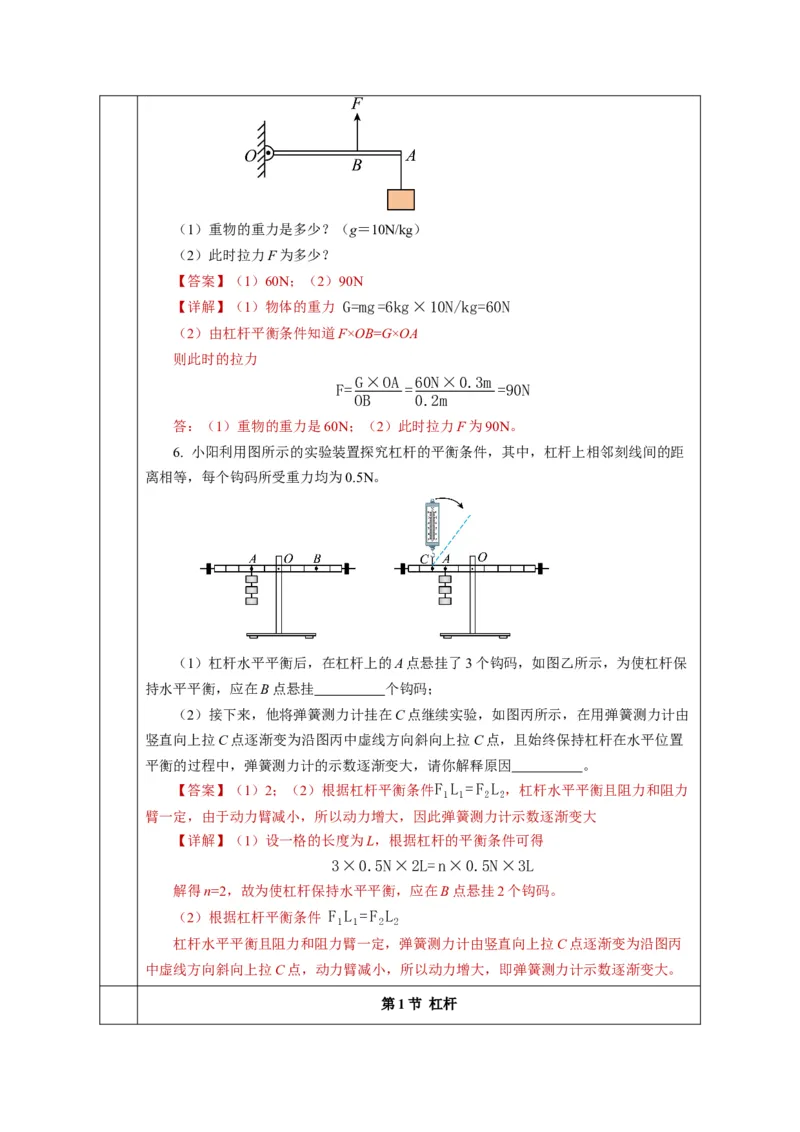
3. 如图甲所示是生活中常用的夹子,拇指对夹子施加压力F 使夹子缓慢张开,夹子
1
上的钢丝对夹子的弹力为F,则F F(填“>”、“=”或“<”),此时夹子是
2 1 2
(填“省力”“费力”或“等臂”)杠杆;如图乙所示,用夹子夹住木块,夹子上A点
受到木块的作用力F 的方向 (填“向下”或“向上”)。
3
【答案】<,省力,向上。
【解析】用手捏开夹子时,手施加的力是动力,夹子上的钢丝对夹子的弹力是阻力,由图可知,此时动力臂大于阻力臂,所以此时夹子是省力杠杆,则F

