
文档内容
2024 年中考第二次模拟考试(新疆卷)
物理·全解全析
一、单项选择题(本大题共12小题,每小题2分,共24分。请按答题卷中的要求作答)
1.下列物质在一般情况下都属于导体的是( )
A.橡胶、丝绸 B.陶瓷、金属
C.石墨、石灰水 D.人体、塑料
【答案】C
【详解】A.橡胶、丝绸在一般情况下不容易导电,属于绝缘体,故A不符合题意;
B.陶瓷在一般情况下不容易导电,属于绝缘体,金属在一般情况下容易导电,属于导体,故B不符合题
意;
C.石墨、石灰水在一般情况下容易导电,属于导体,故C符合题意;
D.人体在一般情况下容易导电,属于导体,塑料在一般情况下不容易导电,属于绝缘体,故D不符合题
意。
故选C。
2.吹奏“鸟笛”时,能发出鸟叫声,这主要是模仿鸟叫声的( )
A.频率 B.响度 C.音调 D.音色
【答案】D
【详解】音色是由发声体的材料、结构等因素决定的,不同发声体发出的声音的音色是不同的。吹奏“鸟
笛”时,能发出鸟叫声,这主要是模仿鸟叫声的音色,故D符合题意,故ABC不符合题意。
故选D。
3.人们常用泡沫塑料箱运送冰冻的海鲜,这是由于泡沫塑料的( )
A.硬度小 B.密度大 C.绝缘性好 D.隔热性好
【答案】D
【详解】人们常用泡沫塑料箱运送冰冻的海鲜,这是由于泡沫塑料的隔热性好,冰冻的海鲜不容易熔化,
能保鲜,故D符合题意,ABC不符合题意。
故选D。
4.“中国环流三号”是我国目前设计参数最高、规模最大的核聚变大科学装置。下列能源的产生与“中
国环流三号”的设计原理相同的是( )
A.地热能 B.潮汐能 C.风能 D.太阳能
【答案】D
【详解】中国环流三号”是利用核聚变产生能量的装置。
A.地热能是由地壳抽取的天然热能,这种能量来自地球内部的熔岩,故A不符合题意;
B.潮汐能是从海水面昼夜间的涨落中获得的能量,故B不符合题意;
C.地球表面大量空气流动所产生的动能就是风能,故C不符合题意;
D.太阳能是太阳内部核聚变产生的,故D符合题意。
故选D。5.电磁继电器可以实现低压控制高压,它的作用相当于工作电路中的( )
A.电源 B.开关 C.用电器 D.导线
【答案】B
【详解】电磁继电器的主要构成是电磁铁,通过电磁铁磁性强弱变化,把衔铁吸下或释放,实现工作电路
的通断,可以实现低电压、弱电流控制高电压、强电流,它的作用相当于工作电路中的开关,故ACD不
符合题意,B符合题意。
故选B。
6.下列词语中涉及的光现象可以用光的直线传播解释的是( )
A.海市蜃楼 B.镜花水月 C.杯弓蛇影 D.立竿见影
【答案】D
【详解】A.海市蜃楼是光在不均匀的大气中传播时发生折射形成的,故A不符合题意;
B.镜花水月是平面镜成像,属于光的反射,故B不符合题意;
C.杯弓蛇影是平面镜成像,属于光的反射,故C不符合题意;
D.立竿见影是由于光的直线传播形成的,故D符合题意。
故选D。
7.一有时间就帮家里干农活的阿布都同学发现,自家拖拉机的柴油机上装有又重又大的飞轮,其作用是
( )
A.增加柴油机的输出功率 B.增加柴油机的稳定性
C.改变柴油机的转速 D.增加柴油机转动的惯性
【答案】D
【详解】柴油机工作时,做功冲程是高温高压的燃气冲动活塞,对外做功,燃气的内能转化为活塞的机械
能,其余三个冲程都是靠飞轮的惯性来完成,由此可知,柴油机上装有又重又大的飞轮的作用是增加柴油
机转动的惯性,更好地完成吸气、压缩和排气三个冲程,故ABC不符合题意,D符合题意。
故选D。
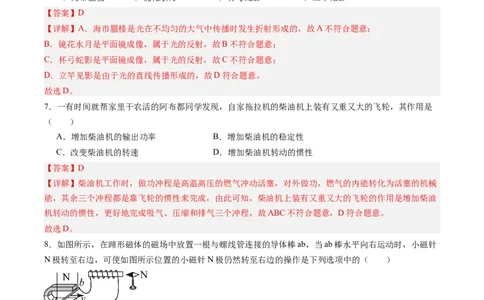
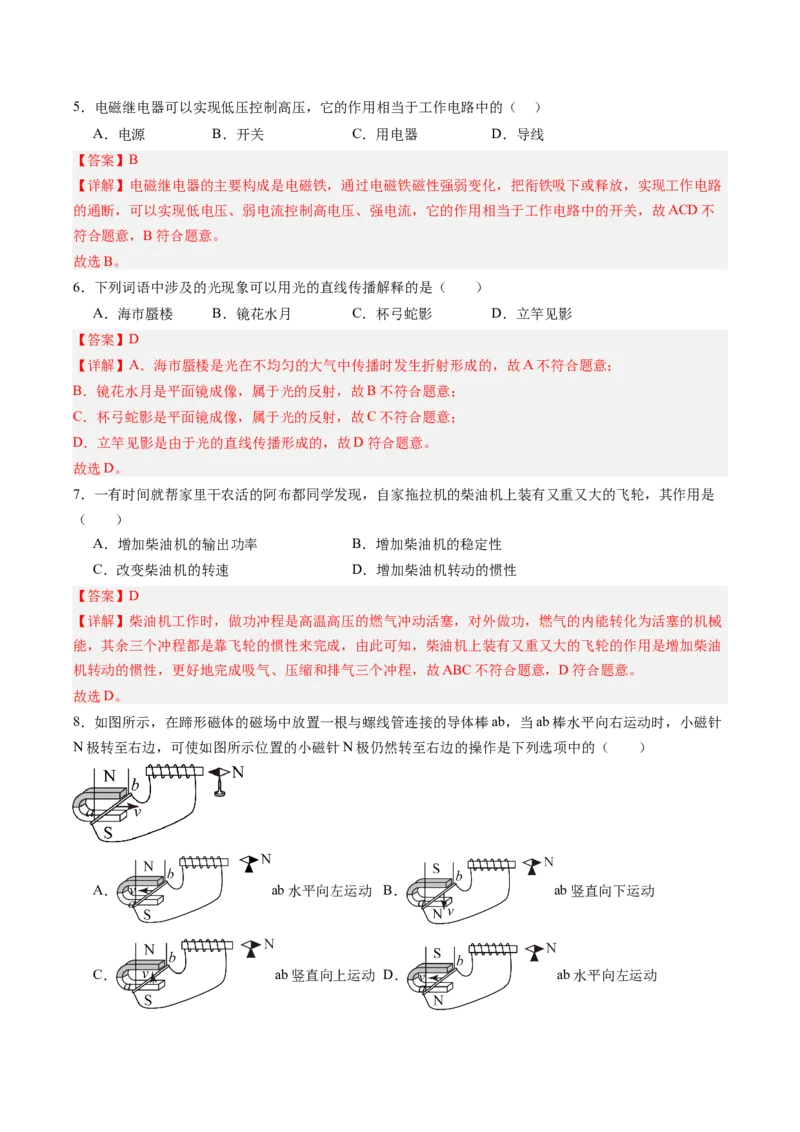
8.如图所示,在蹄形磁体的磁场中放置一根与螺线管连接的导体棒ab,当ab棒水平向右运动时,小磁针
N极转至右边,可使如图所示位置的小磁针N极仍然转至右边的操作是下列选项中的( )
A. ab水平向左运动 B. ab竖直向下运动
C. ab竖直向上运动 D. ab水平向左运动【答案】D
【详解】A.ab水平向左运动切割磁感线,蹄形磁体的磁场方向不变,导体棒运动方向相反,产生的感应
电流反向,螺线管产生的磁场方向反向,小磁针N极转至左边,故A错误,故A不符合题意;
BC.ab竖直向上或向下运动,导体棒ab不切割磁感线,不产生感应电流,小磁针不偏转,故BC错误,
故BC不符合题意;
D.由图可知,蹄形磁体的磁场方向反向,导体棒ab的运动方向反向,导体棒切割磁感线产生的电流方向
不变,小磁针的偏转方向不变,小磁针N极仍然转至右边,故D正确,故D符合题意。
故选D。
9.下面哪个物体的质量约为100克( )
A.一支铅笔 B.一个苹果
C.一只母鸡 D.一头牛
【答案】B
【详解】A.一支铅笔的质量约为8g,故A不符合题意;
B.一个苹果的质量约为100g,故B符合题意;
C.一只母鸡的质量约为2kg,故C不符合题意;
D.一头牛的质量约为1000kg,故D不符合题意。
故选B。
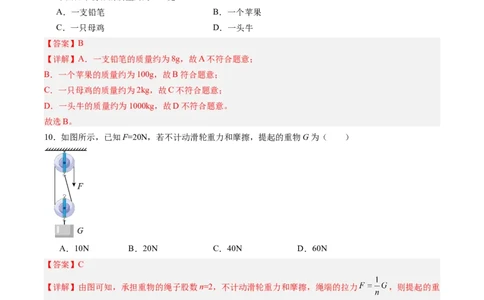
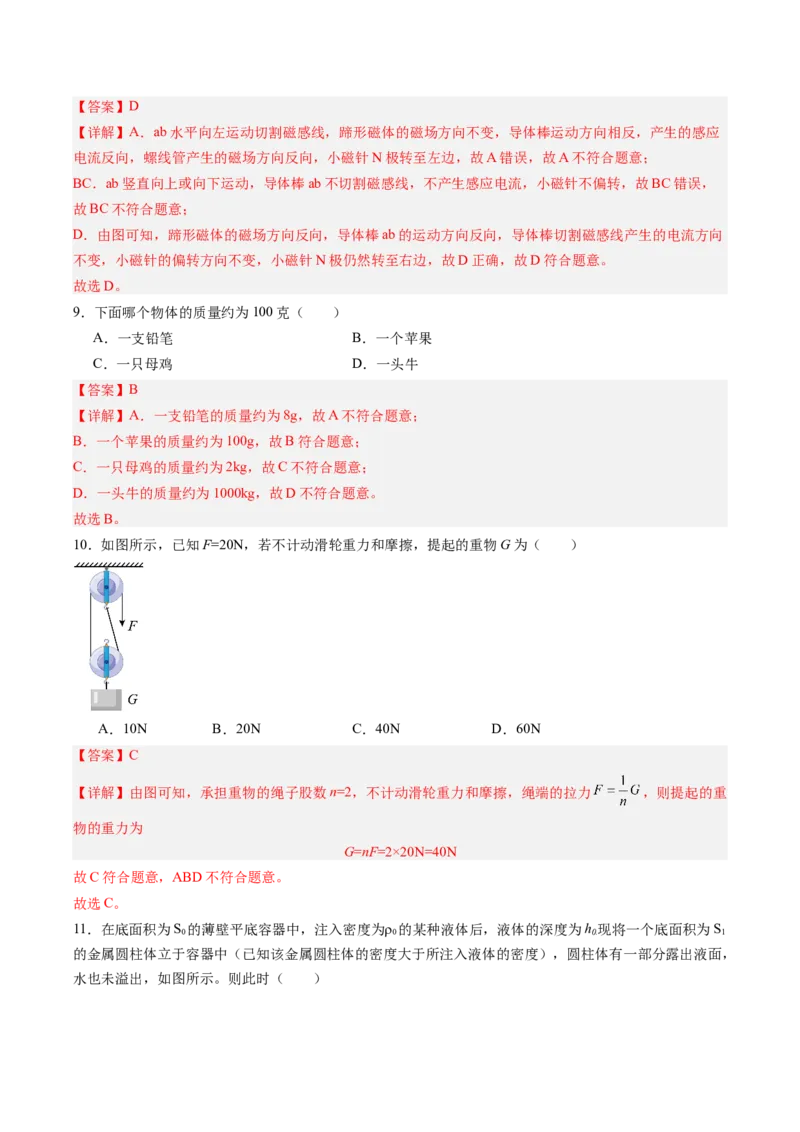
10.如图所示,已知F=20N,若不计动滑轮重力和摩擦,提起的重物G为( )
A.10N B.20N C.40N D.60N
【答案】C
【详解】由图可知,承担重物的绳子股数n=2,不计动滑轮重力和摩擦,绳端的拉力 ,则提起的重
物的重力为
G=nF=2×20N=40N
故C符合题意,ABD不符合题意。
故选C。
11.在底面积为S 的薄壁平底容器中,注入密度为 的某种液体后,液体的深度为h 现将一个底面积为S
0 0 0. 1
的金属圆柱体立于容器中(已知该金属圆柱体的密度大于所注入液体的密度),圆柱体有一部分露出液面,
水也未溢出,如图所示。则此时( )A.水对容器底部的压强为
B.水对容器底部的压强为
C.水对容器底部的压力为
D.水对容器底部的压力为
【答案】B
【详解】容器中液体的体积 , 金属圆柱体会沉底,相当于容器底面积减小了金属圆柱体的底面积,
放入圆柱体后液体深为
液体对容器底部的压强为
根据 可得,液体对容器底的压力
故ACD错误,B正确。
故选B。
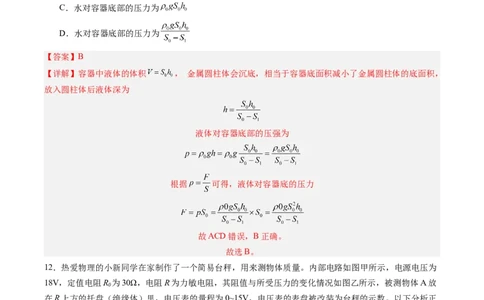
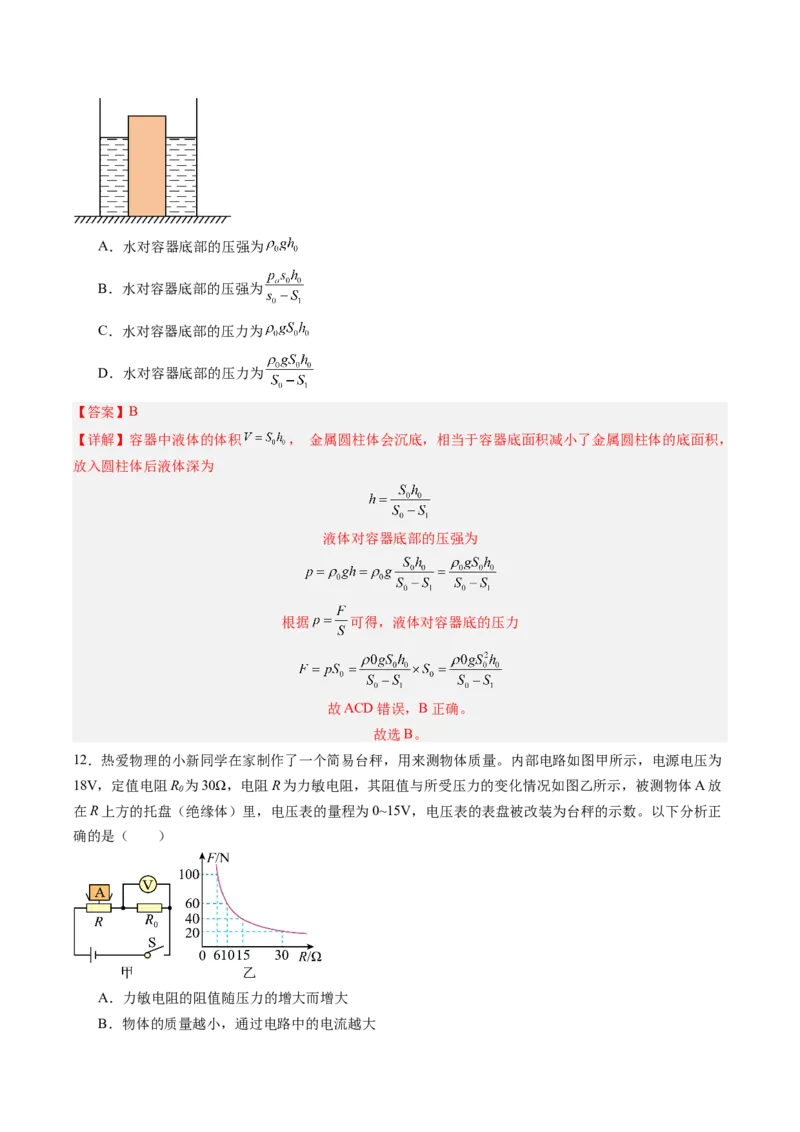
12.热爱物理的小新同学在家制作了一个简易台秤,用来测物体质量。内部电路如图甲所示,电源电压为
18V,定值电阻R 为30Ω,电阻R为力敏电阻,其阻值与所受压力的变化情况如图乙所示,被测物体A放
0
在R上方的托盘(绝缘体)里,电压表的量程为0~15V,电压表的表盘被改装为台秤的示数。以下分析正
确的是( )
A.力敏电阻的阻值随压力的增大而增大
B.物体的质量越小,通过电路中的电流越大C.物体的质量越小,电路的总功率越大
D.在保证电路安全的情况下,该台秤所能称量物体的最大重力为100N
【答案】D
【详解】A.由图乙可知,力敏电阻的阻值随压力的增大而减小,故A错误;
BC.根据电路图可知,R与R 串联接入电路中,电压表测量R 两端的电压。被测者质量越小,根据图乙
0 0
可知,R的阻值变大,电路的总电阻变大,根据欧姆定律可知,电路中的电流变小;根据P=UI可知,电
路消耗的总功率变小,故BC错误;
D.由于电压表的量程为0~15V,因此定值电阻R 两端的电压最大为15V,电路的电流为
0
根据串联电路电压的特点可知,力敏电阻两端的电压为
UR=U-U=18V-15V=3V
0
此时力敏电阻的阻值为
由图乙可知,此时称量物体的最大重力为100N,故D正确。
故选D。
二、填空题(本大题共4小题,每空1分,共26分。请将符合题意的内容填在答题卷相应的
横线上)
13.2021年12月9日15点40分,神舟十三号乘组航天员翟志刚、王亚平、叶光富变身“太空教师”在中
国空间站精彩开讲,并面向全球直播;这次授课中,“太空老师”带给大家印象最深刻的是“水球透镜”
实验;王亚平对实验做了一个小小的升级,通过透镜看到的竟然是一正一反两个像,这是为什么呢?其原
理解释如下:
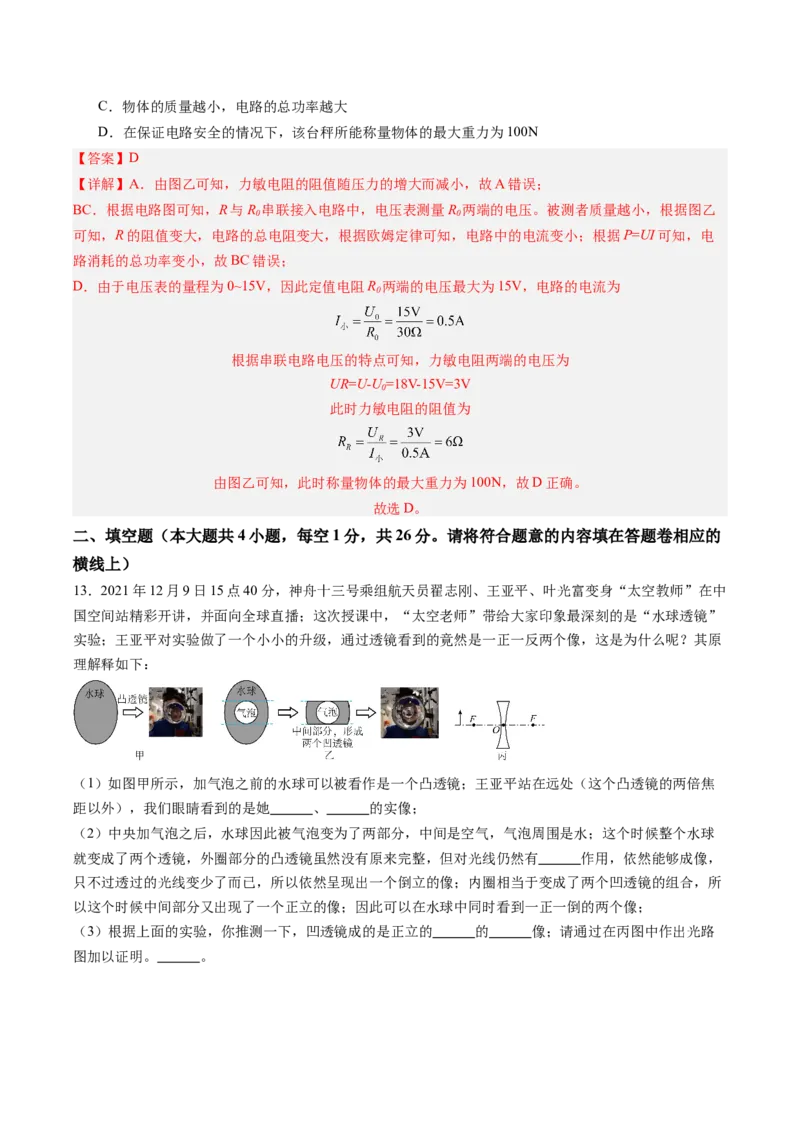
(1)如图甲所示,加气泡之前的水球可以被看作是一个凸透镜;王亚平站在远处(这个凸透镜的两倍焦
距以外),我们眼睛看到的是她 、 的实像;
(2)中央加气泡之后,水球因此被气泡变为了两部分,中间是空气,气泡周围是水;这个时候整个水球
就变成了两个透镜,外圈部分的凸透镜虽然没有原来完整,但对光线仍然有 作用,依然能够成像,
只不过透过的光线变少了而已,所以依然呈现出一个倒立的像;内圈相当于变成了两个凹透镜的组合,所
以这个时候中间部分又出现了一个正立的像;因此可以在水球中同时看到一正一倒的两个像;
(3)根据上面的实验,你推测一下,凹透镜成的是正立的 的 像;请通过在丙图中作出光路
图加以证明。 。【答案】 倒立 缩小 会聚 缩小 虚 见解析
【详解】(1)[1][2]水球可以看作是一个凸透镜,王亚平站在远处,即这个凸透镜的二倍焦距以外,由凸
透镜成像规律可知,u>2f,成倒立、缩小的实像。
(2)[3]水球因此被气泡变为了两部分,中间是空气,气泡周围是水;这个时候整个水球就变成了两个透
镜,外圈成为了一个凸透镜,凸透镜对光线有会聚作用。
(3)[4][5][6][7]平行于主光轴的光线经凹透镜折射后,其折射光线的反向延长线过焦点,过凹透镜光心的
光线传播方向不改变,过过光心的光线与另一条折射光线的反向延长线交于一点即为像点,然后过像点作
垂线即为物体的像,由图可知,为正立、缩小的虚像,如图所示:
14.思考并回答问题:
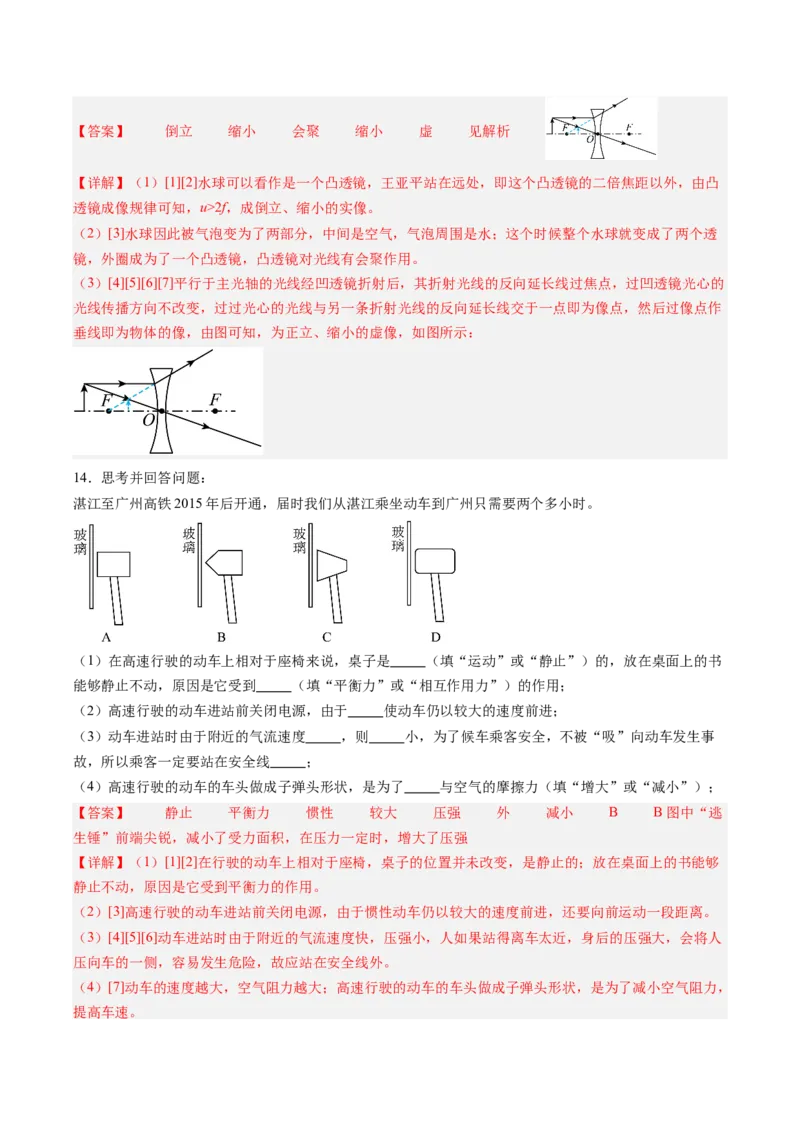
湛江至广州高铁2015年后开通,届时我们从湛江乘坐动车到广州只需要两个多小时。
(1)在高速行驶的动车上相对于座椅来说,桌子是 (填“运动”或“静止”)的,放在桌面上的书
能够静止不动,原因是它受到 (填“平衡力”或“相互作用力”)的作用;
(2)高速行驶的动车进站前关闭电源,由于 使动车仍以较大的速度前进;
(3)动车进站时由于附近的气流速度 ,则 小,为了候车乘客安全,不被“吸”向动车发生事
故,所以乘客一定要站在安全线 ;
(4)高速行驶的动车的车头做成子弹头形状,是为了 与空气的摩擦力(填“增大”或“减小”);
【答案】 静止 平衡力 惯性 较大 压强 外 减小 B B图中“逃
生锤”前端尖锐,减小了受力面积,在压力一定时,增大了压强
【详解】(1)[1][2]在行驶的动车上相对于座椅,桌子的位置并未改变,是静止的;放在桌面上的书能够
静止不动,原因是它受到平衡力的作用。
(2)[3]高速行驶的动车进站前关闭电源,由于惯性动车仍以较大的速度前进,还要向前运动一段距离。
(3)[4][5][6]动车进站时由于附近的气流速度快,压强小,人如果站得离车太近,身后的压强大,会将人
压向车的一侧,容易发生危险,故应站在安全线外。
(4)[7]动车的速度越大,空气阻力越大;高速行驶的动车的车头做成子弹头形状,是为了减小空气阻力,
提高车速。15.我国制造的全球首座十万吨级深水半潜式生产储油平台“深海一号”已投入使用。
(1)“深海一号”的主要结构为四个浮在水中的长、宽均为20m的立柱,在组装时将重约2×104 t的生产
平台安装在四个立柱上,安装完成后每个立柱上方受到的压力为 N,立柱浸入水中的深度约增加
m;
(2)“深海一号”到达作业区域后,靠钉在海底的16根横截面积为500cm2、长2000m、密度为1.35×103
kg/m3的聚酯锚链将其固定,锚链总质量为 t;
(3)平台上装配了5G设备,地面工作人员利用 (选填“超声波”或“电磁波”)就能实现远程
控制。“深海一号”的四个立柱内都设有压载舱,若系统检测到平台重心向左侧偏移,就会立刻对右侧压
载舱进行 (选填“灌水”或“排水”)。在台风天气,为增加平台的稳定性,应 (选填
“升高”或“降低”)平台的重心。
【答案】 12.5 2160 电磁波 灌水 降低
【详解】(1)[1]生产平台的重力为
所以每个立柱受到的压力为
[2]整个深海一号漂浮在水面上,浮力等于重力;根据阿基米德原理有
所有立柱浸入水中的深度增加约为
所以每根立柱浸入水中的深度增加量为
∆
(2)[3]每根聚酯锚链的质量为
则16根锚链的总质量为
(3)[4][5][6]平台上装配了5G设备,地面工作人员利用电磁波就能实现远程控制;“深海一号”的四个
立柱内都设有压载舱,若系统检测到平台重心向左侧偏移,需要给右侧增重,就需要对右侧压载舱进行灌
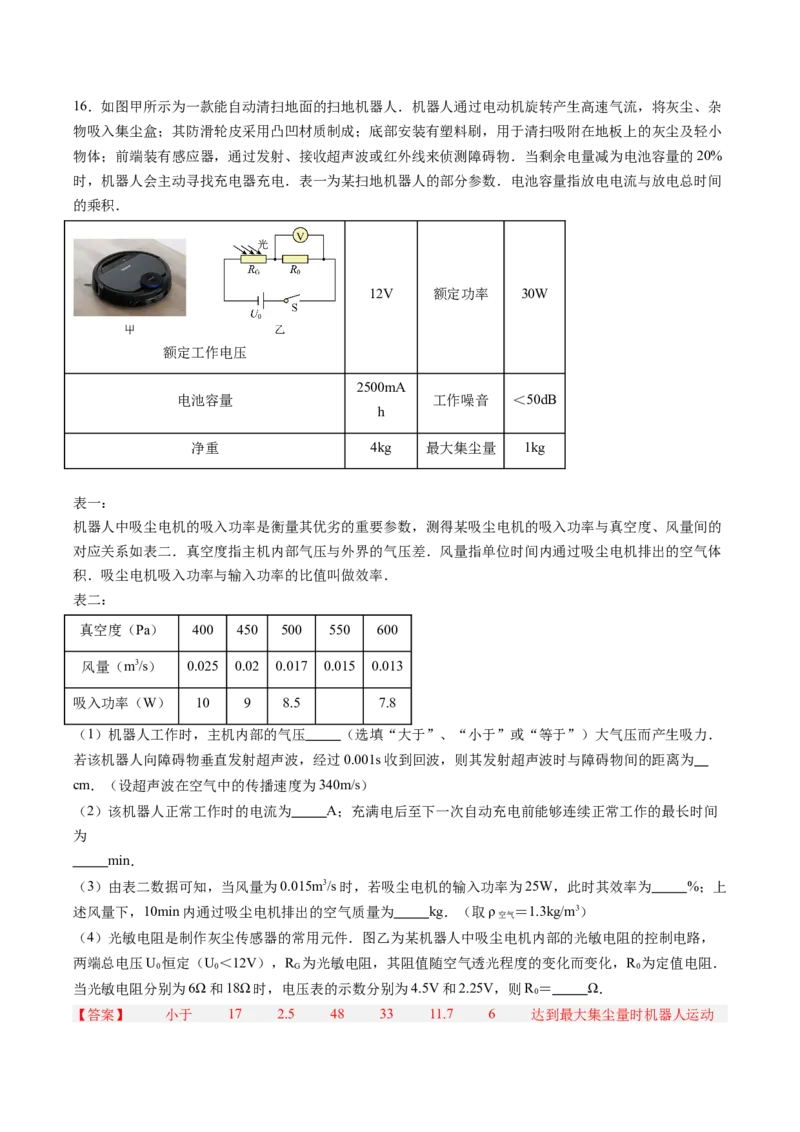
水;重心越低,物体稳定性越好,所以在台风天气,为增加平台的稳定性,应降低平台的重心。16.如图甲所示为一款能自动清扫地面的扫地机器人.机器人通过电动机旋转产生高速气流,将灰尘、杂
物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小
物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%
时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间
的乘积.
12V 额定功率 30W
额定工作电压
2500mA
电池容量 工作噪音 <50dB
h
净重 4kg 最大集尘量 1kg
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的
对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体
积.吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
真空度(Pa) 400 450 500 550 600
风量(m3/s) 0.025 0.02 0.017 0.015 0.013
吸入功率(W) 10 9 8.5 7.8
(1)机器人工作时,主机内部的气压 (选填“大于”、“小于”或“等于”)大气压而产生吸力.
若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离为
cm.(设超声波在空气中的传播速度为340m/s)
(2)该机器人正常工作时的电流为 A;充满电后至下一次自动充电前能够连续正常工作的最长时间
为
min.
(3)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为 %;上
述风量下,10min内通过吸尘电机排出的空气质量为 kg.(取ρ =1.3kg/m3)
空气
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某机器人中吸尘电机内部的光敏电阻的控制电路,
两端总电压U 恒定(U<12V),R 为光敏电阻,其阻值随空气透光程度的变化而变化,R 为定值电阻.
0 0 G 0
当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为4.5V和2.25V,则R = Ω.
0
【答案】 小于 17 2.5 48 33 11.7 6 达到最大集尘量时机器人运动的速度为0.6m/s.
【详解】(1)由流体压强与流速的关系:流速越大的位置压强越小可知,
机器人在工作时,由于转动的扇叶处气体的流速大,压强小,在外界大气压的作用下将灰尘、杂物吸入集
尘盒,
故主机内部的气压小于大气压而产生吸力;
由v= 得,
超声波从发射到收到回波所通过的总路程:
s =vt=340m/s×0.001s=0.34m,
总
则其发射超声波时与障碍物间的距离:
s= = =0.17m=17cm,
(2)由P=UI得,机器人正常工作时的电流:
I= = =2.5A,
充满电后的电池容量Q=2500mAh,下一次自动充电前的电池容量:
1
Q=ηQ =20%×2500mAh=500mAh,
2 1
消耗的电池容量:
Q=Q﹣Q=2500mAh﹣500mAh=2000mAh,
1 2
正常工作时的电流:
I=2.5A=2500mA,
由I= 得,连续正常工作的最长时间:
t= = =0.8h=48min;
(3)由表格中数据可知,吸入功率等于真空度与风量的乘积,
当风量为0.015m3/s时,吸尘电机吸入功率:
P =550Pa×0.015m3/s=8.25W,
吸入
电动机的效率:
η = ×100%= ×100%=33%,
电机
当风量为0.015m3/s时,t=10min=600s,
通过吸尘电机提出的空气体积:
V=0.015m3/s×600s=9m3,
由ρ= 得,通过吸尘电机提出的空气质量:
m=ρ V=1.3kg/m3×9m3=11.7kg;
空气(4)由电路图可知,光敏电阻R 和定值电阻R 串联,电压表测定值电阻R 两端的电压,
G 0 0
当光敏电阻R =6Ω时,电压表的示数U=4.5V,光敏电阻两端的电压U=U﹣U,
G1 1 0 1
此时电路中的电流:
I= = ,即 = …①
1
当光敏电阻R =18Ω时,电压表的示数U=3V,光敏电阻两端的电压U′=U﹣U,
G2 1 0 2
此时电路中的电流:
I= = ,即 = …②
2
联立①②可解得:U=9V,R =6Ω
0 0
三、作图题(每图2分,共6分)
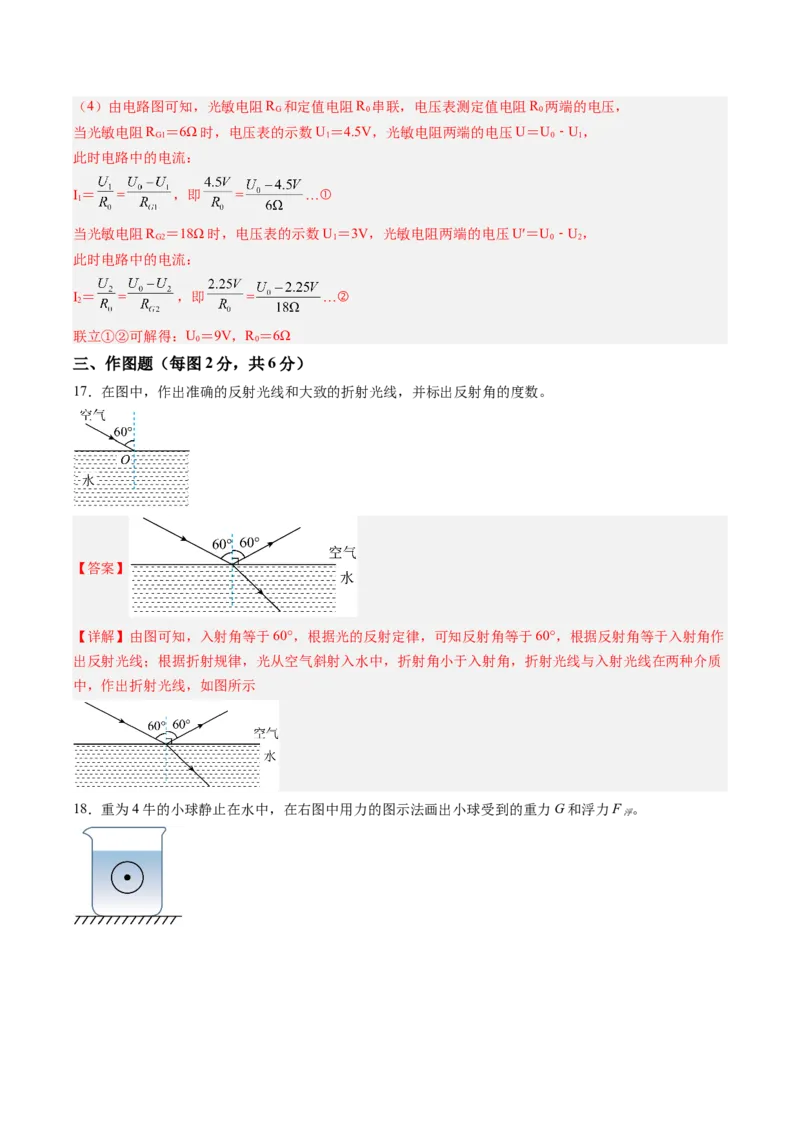
17.在图中,作出准确的反射光线和大致的折射光线,并标出反射角的度数。
【答案】
【详解】由图可知,入射角等于60°,根据光的反射定律,可知反射角等于60°,根据反射角等于入射角作
出反射光线;根据折射规律,光从空气斜射入水中,折射角小于入射角,折射光线与入射光线在两种介质
中,作出折射光线,如图所示
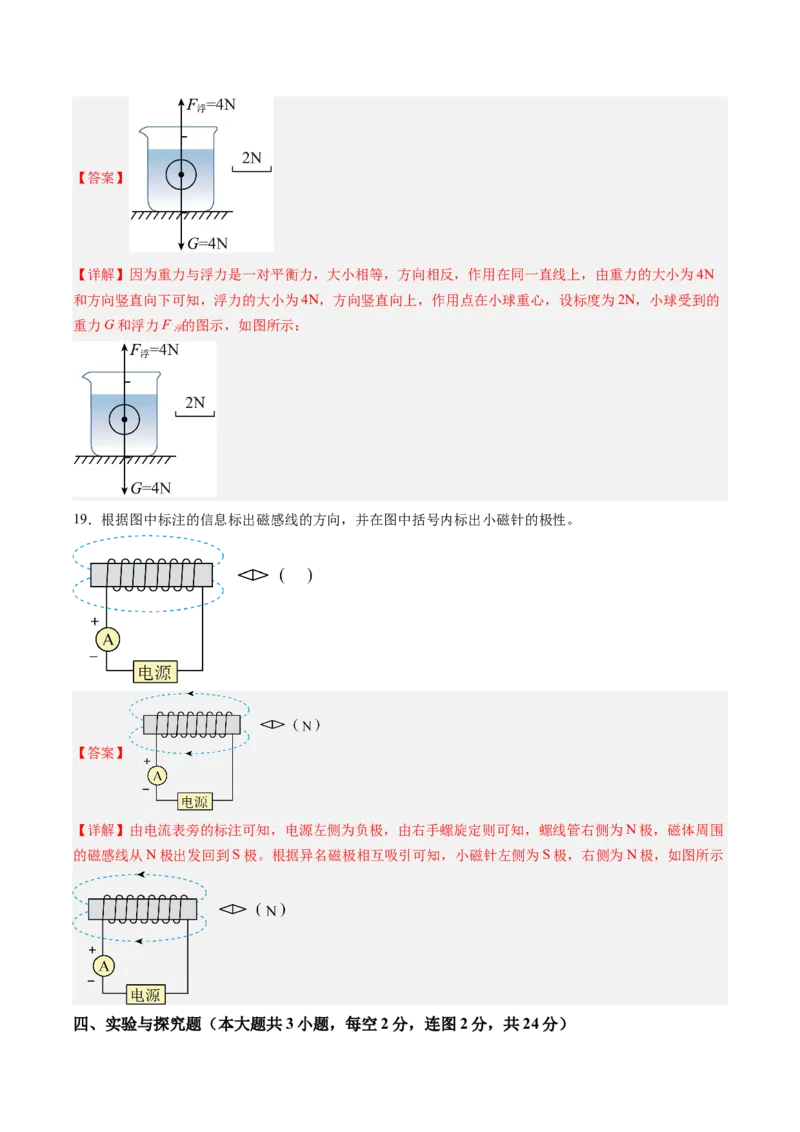
18.重为4牛的小球静止在水中,在右图中用力的图示法画出小球受到的重力G和浮力F 。
浮【答案】
【详解】因为重力与浮力是一对平衡力,大小相等,方向相反,作用在同一直线上,由重力的大小为4N
和方向竖直向下可知,浮力的大小为4N,方向竖直向上,作用点在小球重心,设标度为2N,小球受到的
重力G和浮力F 的图示,如图所示:
浮
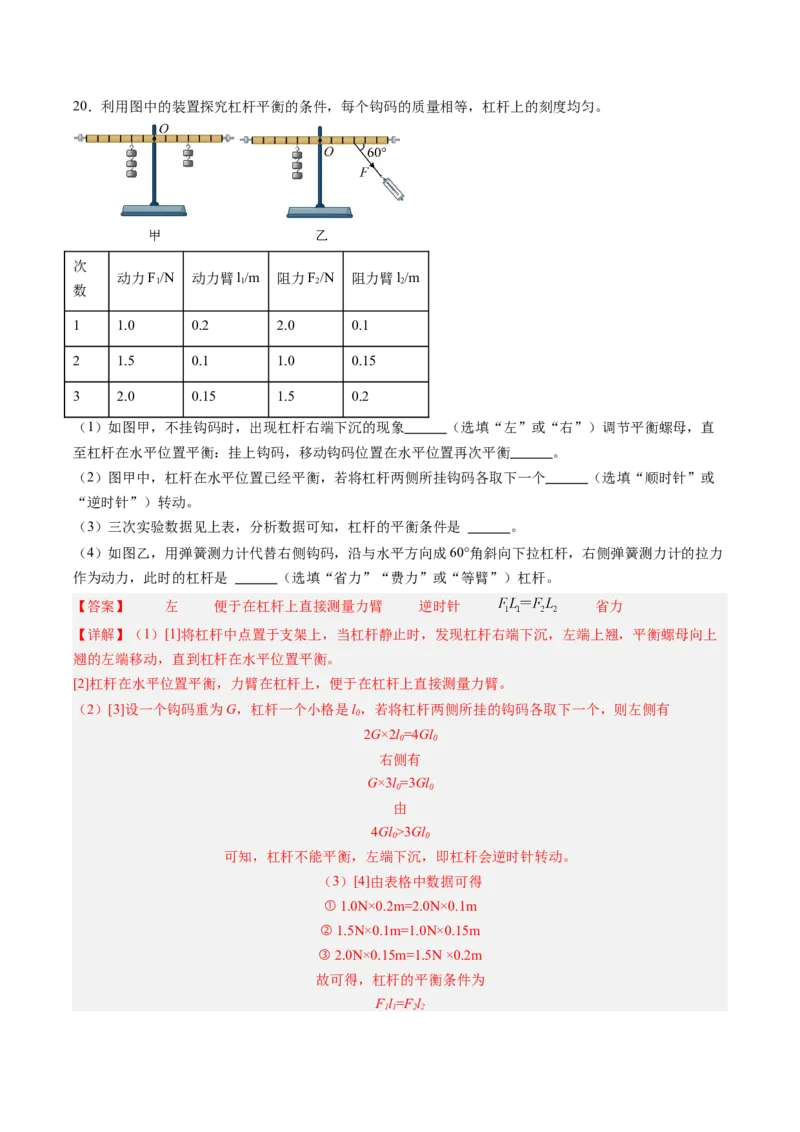
19.根据图中标注的信息标出磁感线的方向,并在图中括号内标出小磁针的极性。
【答案】
【详解】由电流表旁的标注可知,电源左侧为负极,由右手螺旋定则可知,螺线管右侧为N极,磁体周围
的磁感线从N极出发回到S极。根据异名磁极相互吸引可知,小磁针左侧为S极,右侧为N极,如图所示
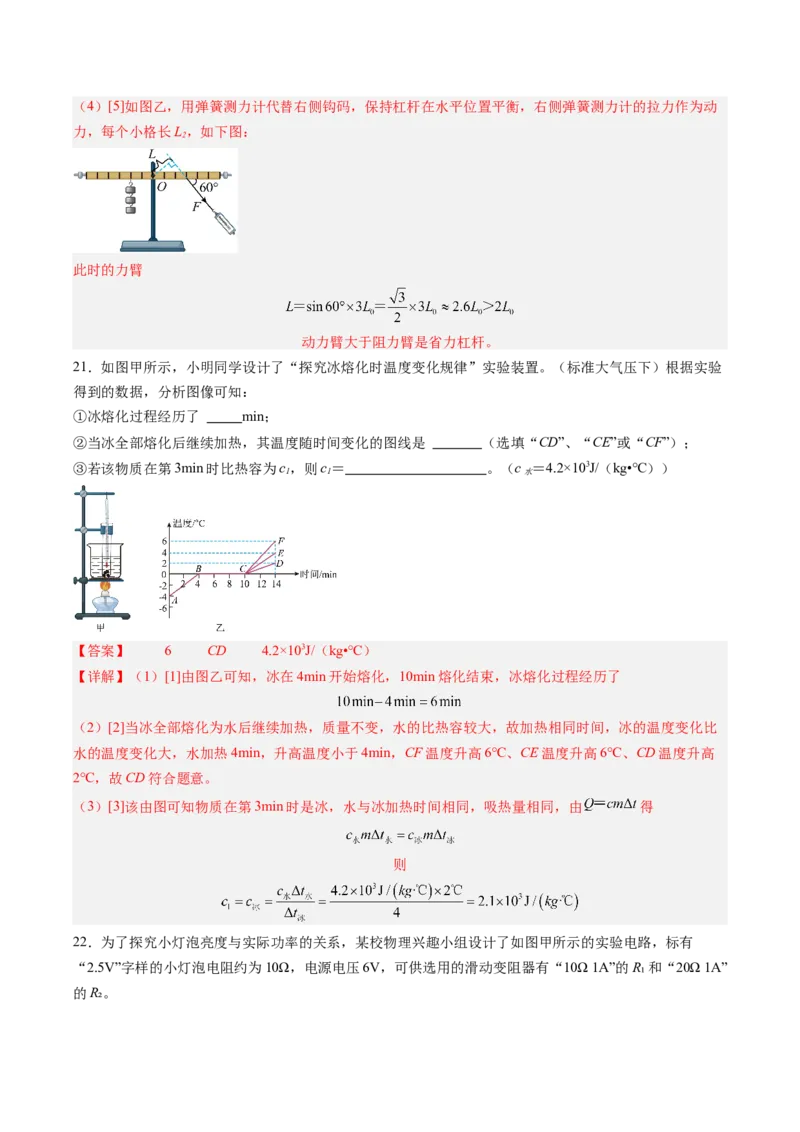
四、实验与探究题(本大题共3小题,每空2分,连图2分,共24分)20.利用图中的装置探究杠杆平衡的条件,每个钩码的质量相等,杠杆上的刻度均匀。
次
动力F/N 动力臂l/m 阻力F/N 阻力臂l/m
1 1 2 2
数
1 1.0 0.2 2.0 0.1
2 1.5 0.1 1.0 0.15
3 2.0 0.15 1.5 0.2
(1)如图甲,不挂钩码时,出现杠杆右端下沉的现象 (选填“左”或“右”)调节平衡螺母,直
至杠杆在水平位置平衡:挂上钩码,移动钩码位置在水平位置再次平衡 。
(2)图甲中,杠杆在水平位置已经平衡,若将杠杆两侧所挂钩码各取下一个 (选填“顺时针”或
“逆时针”)转动。
(3)三次实验数据见上表,分析数据可知,杠杆的平衡条件是 。
(4)如图乙,用弹簧测力计代替右侧钩码,沿与水平方向成60°角斜向下拉杠杆,右侧弹簧测力计的拉力
作为动力,此时的杠杆是 (选填“省力”“费力”或“等臂”)杠杆。
【答案】 左 便于在杠杆上直接测量力臂 逆时针 省力
【详解】(1)[1]将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉,左端上翘,平衡螺母向上
翘的左端移动,直到杠杆在水平位置平衡。
[2]杠杆在水平位置平衡,力臂在杠杆上,便于在杠杆上直接测量力臂。
(2)[3]设一个钩码重为G,杠杆一个小格是l,若将杠杆两侧所挂的钩码各取下一个,则左侧有
0
2G×2l=4Gl
0 0
右侧有
G×3l=3Gl
0 0
由
4Gl >3Gl
0 0
可知,杠杆不能平衡,左端下沉,即杠杆会逆时针转动。
(3)[4]由表格中数据可得
① 1.0N×0.2m=2.0N×0.1m
② 1.5N×0.1m=1.0N×0.15m
③ 2.0N×0.15m=1.5N ×0.2m
故可得,杠杆的平衡条件为
Fl=Fl
11 22(4)[5]如图乙,用弹簧测力计代替右侧钩码,保持杠杆在水平位置平衡,右侧弹簧测力计的拉力作为动
力,每个小格长L,如下图:
2
此时的力臂
动力臂大于阻力臂是省力杠杆。
21.如图甲所示,小明同学设计了“探究冰熔化时温度变化规律”实验装置。(标准大气压下)根据实验
得到的数据,分析图像可知:
①冰熔化过程经历了 min;
②当冰全部熔化后继续加热,其温度随时间变化的图线是 (选填“CD”、“CE”或“CF”);
③若该物质在第3min时比热容为c,则c= 。(c =4.2×103J/(kg•℃))
1 1 水
【答案】 6 CD 4.2×103J/(kg•℃)
【详解】(1)[1]由图乙可知,冰在4min开始熔化,10min熔化结束,冰熔化过程经历了
(2)[2]当冰全部熔化为水后继续加热,质量不变,水的比热容较大,故加热相同时间,冰的温度变化比
水的温度变化大,水加热4min,升高温度小于4min,CF温度升高6℃、CE温度升高6℃、CD温度升高
2℃,故CD符合题意。
(3)[3]该由图可知物质在第3min时是冰,水与冰加热时间相同,吸热量相同,由 得
则
22.为了探究小灯泡亮度与实际功率的关系,某校物理兴趣小组设计了如图甲所示的实验电路,标有
“2.5V”字样的小灯泡电阻约为10Ω,电源电压6V,可供选用的滑动变阻器有“10Ω 1A”的R₁和“20Ω 1A”
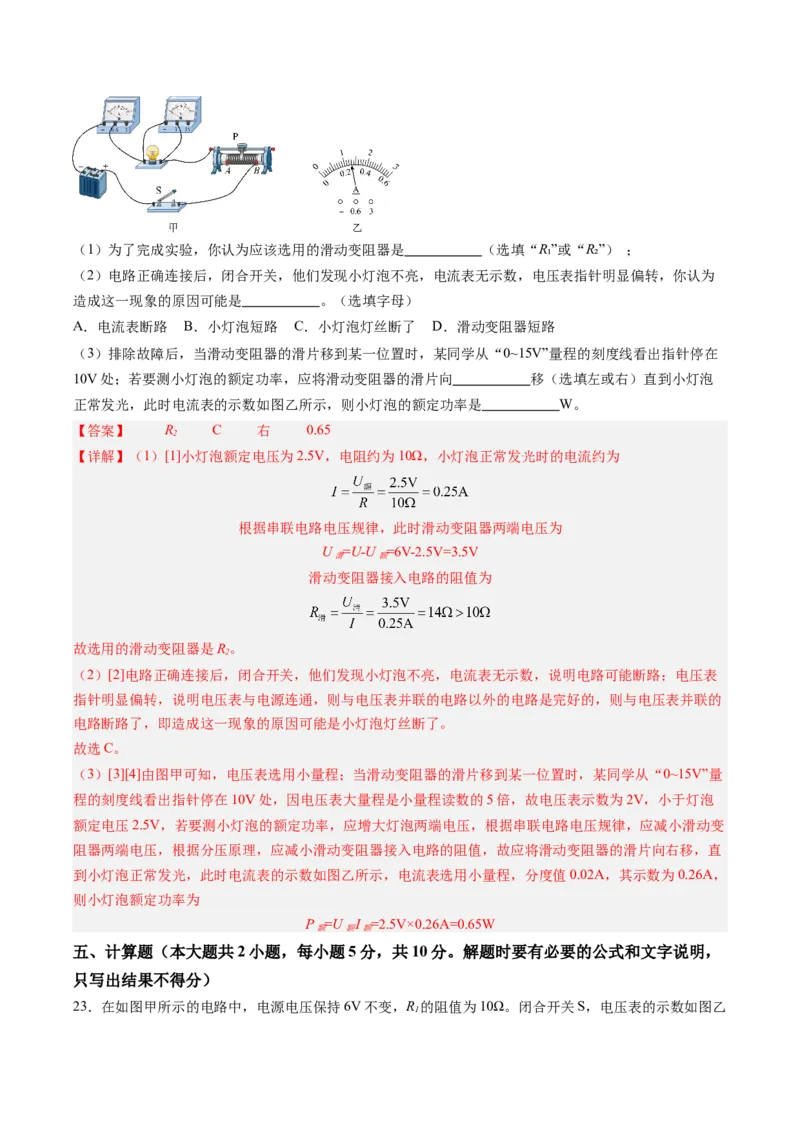
的R₂。(1)为了完成实验,你认为应该选用的滑动变阻器是 (选填“R₁”或“R₂”) ;
(2)电路正确连接后,闭合开关,他们发现小灯泡不亮,电流表无示数,电压表指针明显偏转,你认为
造成这一现象的原因可能是 。(选填字母)
A.电流表断路 B.小灯泡短路 C.小灯泡灯丝断了 D.滑动变阻器短路
(3)排除故障后,当滑动变阻器的滑片移到某一位置时,某同学从“0~15V”量程的刻度线看出指针停在
10V处;若要测小灯泡的额定功率,应将滑动变阻器的滑片向 移(选填左或右)直到小灯泡
正常发光,此时电流表的示数如图乙所示,则小灯泡的额定功率是 W。
【答案】 R C 右 0.65
2
【详解】(1)[1]小灯泡额定电压为2.5V,电阻约为10Ω,小灯泡正常发光时的电流约为
根据串联电路电压规律,此时滑动变阻器两端电压为
U =U-U =6V-2.5V=3.5V
滑 额
滑动变阻器接入电路的阻值为
故选用的滑动变阻器是R。
2
(2)[2]电路正确连接后,闭合开关,他们发现小灯泡不亮,电流表无示数,说明电路可能断路;电压表
指针明显偏转,说明电压表与电源连通,则与电压表并联的电路以外的电路是完好的,则与电压表并联的
电路断路了,即造成这一现象的原因可能是小灯泡灯丝断了。
故选C。
(3)[3][4]由图甲可知,电压表选用小量程;当滑动变阻器的滑片移到某一位置时,某同学从“0~15V”量
程的刻度线看出指针停在10V处,因电压表大量程是小量程读数的5倍,故电压表示数为2V,小于灯泡
额定电压2.5V,若要测小灯泡的额定功率,应增大灯泡两端电压,根据串联电路电压规律,应减小滑动变
阻器两端电压,根据分压原理,应减小滑动变阻器接入电路的阻值,故应将滑动变阻器的滑片向右移,直
到小灯泡正常发光,此时电流表的示数如图乙所示,电流表选用小量程,分度值0.02A,其示数为0.26A,
则小灯泡额定功率为
P =U I =2.5V×0.26A=0.65W
额 额 额
五、计算题(本大题共2小题,每小题5分,共10分。解题时要有必要的公式和文字说明,
只写出结果不得分)
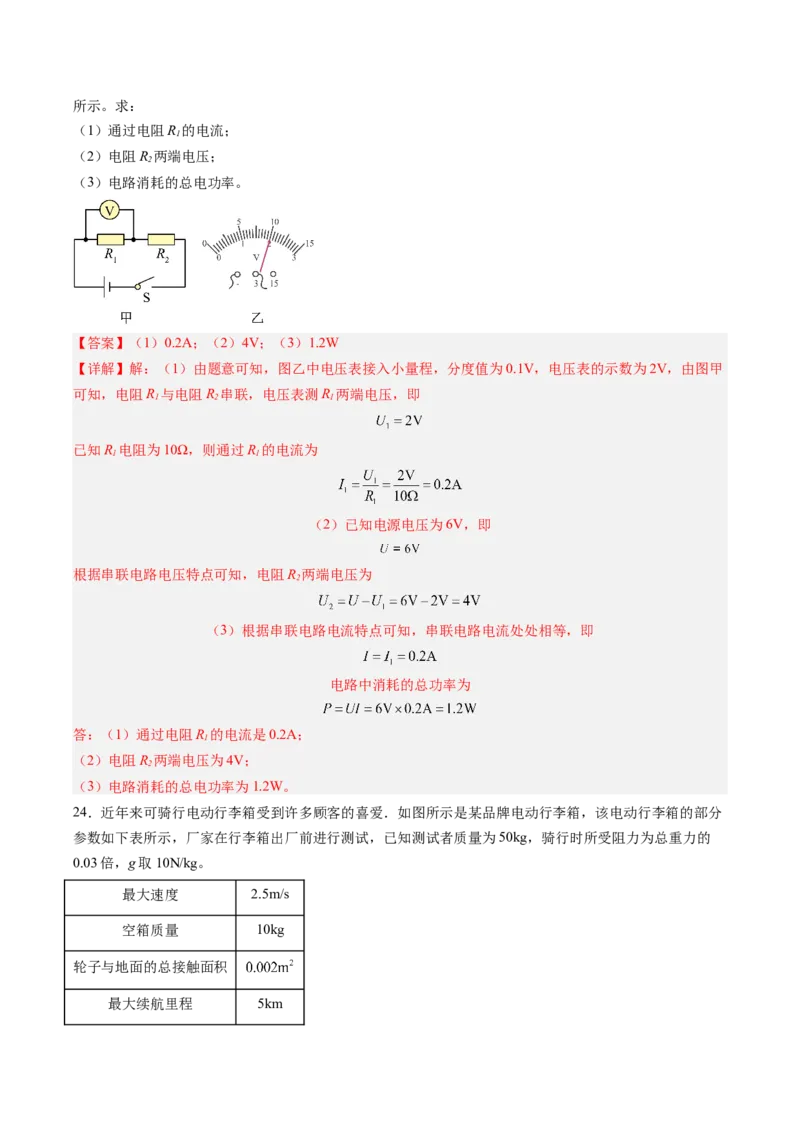
23.在如图甲所示的电路中,电源电压保持6V不变,R 的阻值为10Ω。闭合开关S,电压表的示数如图乙
1所示。求:
(1)通过电阻R 的电流;
1
(2)电阻R 两端电压;
2
(3)电路消耗的总电功率。
【答案】(1)0.2A;(2)4V;(3)1.2W
【详解】解:(1)由题意可知,图乙中电压表接入小量程,分度值为0.1V,电压表的示数为2V,由图甲
可知,电阻R 与电阻R 串联,电压表测R 两端电压,即
1 2 1
已知R 电阻为10Ω,则通过R 的电流为
1 1
(2)已知电源电压为6V,即
根据串联电路电压特点可知,电阻R 两端电压为
2
(3)根据串联电路电流特点可知,串联电路电流处处相等,即
电路中消耗的总功率为
答:(1)通过电阻R 的电流是0.2A;
1
(2)电阻R 两端电压为4V;
2
(3)电路消耗的总电功率为1.2W。
24.近年来可骑行电动行李箱受到许多顾客的喜爱.如图所示是某品牌电动行李箱,该电动行李箱的部分
参数如下表所示,厂家在行李箱出厂前进行测试,已知测试者质量为50kg,骑行时所受阻力为总重力的
0.03倍,g取10N/kg。
最大速度 2.5m/s
空箱质量 10kg
轮子与地面的总接触面积
最大续航里程 5km(1)测试者坐在空的电动行李箱上时,对水平地面的压强为多少?
(2)若测试者在水平地面上以最大速度匀速直线骑行了30min,则前进的路程有多大?
(3)上述测试过程中牵引力做的功和功率各为多少?
【答案】(1) ;(2)4500m;(3) ,45W
【详解】解:(1)根据题意可知,测试者坐在空的行李箱上时总重力为
对水平地面的压强为
(2)根据题意可知,测试者与行李箱前进的路程
(3)因匀速直线骑行,骑行时的牵引力为
牵引力做的功为
做功的功率为
(1)测试者坐在空的电动行李箱上时,对水平地面的压强为 ;
(2)前进的路程为4500m;
(3)上述测试过程中牵引力做的功和功率各为 ,45W。

