
文档内容
西北师大附中
2025—2026 学年第二学期第一次月考考试试题
高一物理
一、选择题(本题共10小题,共43分。1~7题只有一项符合题目要求,每小题4分,8~10
题有多项符合题目要求,全部选对得5分,选对但不全的得3分,有选错或不答得0分。)
1.A、B两火箭沿同一方向高速飞过地面上的某处,v > v ,在地面上的人观察到的结果
A B
正确的是( )
A.火箭A上的时钟走得最快 B.地面上的时钟走得最快
C.火箭B上的时钟走得最快 D.火箭B上的时钟走得最慢
2.2026年1月13 日,我国使用长征六号改运载火箭成功将遥感五十号01星送入预定轨道,
中国航天宇航发射任务迎来“开门红”。遥感五十号01星在环地椭圆轨道上运行时( )
A.受地球的引力大小保持不变 B.相对地球的速度大小保持不变
C.离地球越近,其相对地球的速度越小 D.离地球越近,其所受地球的引力越大
3.一均匀球形星体的密度为 ρ,引力常量为 G,则在该星体表面附近沿圆轨道绕其运动的卫
星的周期是( )
3 4 1 1
A. B. C. D.
G G 3G 4G
4.如图所示,将轻质弹簧的一端固定在水平桌面上O点,当弹簧处于自由状态时,弹簧另
一端在A点。用一个金属小球挤压弹簧至B点,由静止释放小球,随即小球被弹簧竖直
弹出,已知C点为AB的中点,则( )
A.从B到A过程中,小球的重力和弹力都做负功
B.从B到A过程中,小球的动能一直在增大
C.从B到A过程中,弹簧的弹性势能先增大后减小
D.从B到C过程弹簧弹力对小球做功大于从C到A过程弹力对小球做功
5.如图,水平放置圆形餐桌桌面半径为R。桌面中心放置一个可绕其中心轴转动的圆盘,圆
盘半径为r,圆心与餐桌圆心重合。在圆盘的边缘放置一个质量为m的小物块,小物块与
圆盘间的动摩擦因数为μ ,小物块与餐桌间的动摩擦因数为μ 。最大静摩擦力等于滑动
1 2
摩擦力,重力加速度大小为g,圆盘厚度及圆盘与餐桌间的间隙不计,小物块可看作质
点。由静止开始,缓慢增加圆盘转速,则下列说法正确的是( )
A.小物块在圆盘上的最大加速度一定大于小物块在桌面上运动时的加速度
B.小物块在圆盘上的最大加速度一定小于小物块在桌面上运动时的加速度
g
C.圆盘角速度增大到= 1 时,小物块恰好不从圆盘上滑落
r
D.小物块从圆盘滑落后在餐桌上做匀加速直线运动
6.质量为m的汽车在平直路面上匀加速启动,启动过程的速度变化规律如图所示,其中OA
为过原点的一条直线,整个运动过程中汽车所受阻力恒为F,则( )
f
第1页,共4页
{#{QQABIYApxwCYkIQACY77U0VICQkYkJGRJIgOQRAUOAQiCRNIBAA=}#}A. 0~t 时间内,汽车的牵引力等于m
1
第2页,共4页
v
1
t1
B. t ~t 时间内汽车的功率等于t 以后汽车的功率
1 2 2
C. t ~t 时间内,汽车的功率小于F v
1 2 f 2
D. t ~t 时间内,汽车的平均速度等于
1 2
v
1
+
2
v
2
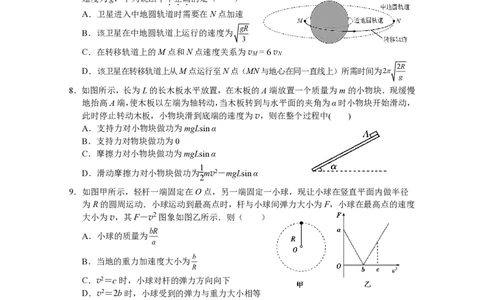
7.如图,一颗质量为m的卫星要发射到中地圆轨道上,通过M、N两位置的变轨,经椭圆
转移轨道进入中地圆轨道运行。已知近地圆轨道的半径可认为等于地球半径,中地圆轨
道与近地圆轨道共平面且轨道半径为地球半径的3倍,地球半径为R,地球表面的重力加
速度为g,下列说法中不正确的是( )
...
A.卫星进入中地圆轨道时需要在N点加速
gR
B.该卫星在中地圆轨道上运行的速度为
3
C.在转移轨道上的M点和N点速度关系为v = 6 v
M N
D.该卫星在转移轨道上从M点运行至N点(MN与地心在同一直线上)所需时间为 2
2 R
g
8.如图所示,长为L的长木板水平放置,在木板的A端放置一个质量为m的小物块.现缓慢
地抬高A端,使木板以左端为轴转动,当木板转到与水平面的夹角为α时小物块开始滑动,
此时停止转动木板,小物块滑到底端的速度为v,则在整个过程中( )
A.支持力对小物块做功为mgLsin α
B.支持力对物块做功为0
C.摩擦力对小物块做功为mgLsin α
1
D.滑动摩擦力对小物块做功为 mv2-mgLsin α
2
9.如图甲所示,轻杆一端固定在O点,另一端固定一小球,现让小球在竖直平面内做半径
为R的圆周运动.小球运动到最高点时,杆与小球间弹力大小为F,小球在最高点的速度
大小为v,其F-v2图象如图乙所示.则( )
bR
A.小球的质量为
a
b
B.当地的重力加速度大小为
R
C.v2=c时,小球对杆的弹力方向向下
D.v2=2b时,小球受到的弹力与重力大小相等
10.宇宙中存在一些离其他恒星较远的四颗星组成的系统,通常可忽略其他星体对它们的引力
作用。天眼在观察中发现三颗质量均为m的星球A、B、C恰构成一个边长为L的正三角
形,在它们的中心O处还有一颗质量为3m的星球,如图所示。已知引力常量为G,每个
星球的半径均远小于L。则下列说法正确的是( )
A.顶点星体所受合力大小为
(
9 + 3
2 L
)
G m 2
( )
1+3 3 Gm
B.A、B、C三颗星球的线速度大小均为
L
{#{QQABIYApxwCYkIQACY77U0VICQkYkJGRJIgOQRAUOAQiCRNIBAA=}#}C.A、B、C三颗星球的周期均为
第3页,共4页
(
3
4
3
2 L
3
3
)
G m
+
D.若O处的星球被均分到A、B、C三颗星球上,A、B、C三颗星球仍按原轨道运动,
则A、B、C三颗星球运动的周期将变大
二、实验题(本题共2小题,每空2分,共18分。)
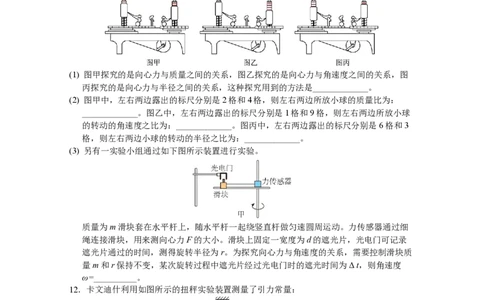
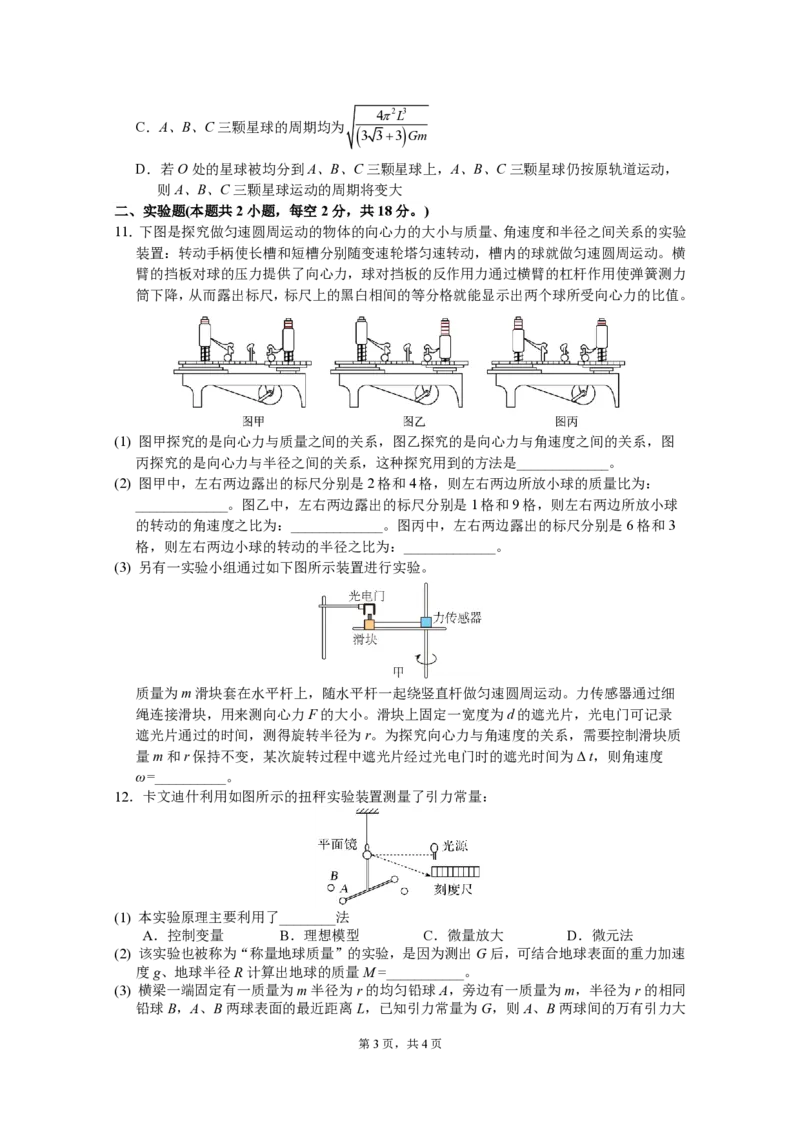
11.下图是探究做匀速圆周运动的物体的向心力的大小与质量、角速度和半径之间关系的实验
装置:转动手柄使长槽和短槽分别随变速轮塔匀速转动,槽内的球就做匀速圆周运动。横
臂的挡板对球的压力提供了向心力,球对挡板的反作用力通过横臂的杠杆作用使弹簧测力
筒下降,从而露出标尺,标尺上的黑白相间的等分格就能显示出两个球所受向心力的比值。
(1) 图甲探究的是向心力与质量之间的关系,图乙探究的是向心力与角速度之间的关系,图
丙探究的是向心力与半径之间的关系,这种探究用到的方法是_____________。
(2) 图甲中,左右两边露出的标尺分别是2格和4格,则左右两边所放小球的质量比为:
_____________。图乙中,左右两边露出的标尺分别是1格和9格,则左右两边所放小球
的转动的角速度之比为:_____________。图丙中,左右两边露出的标尺分别是6格和3
格,则左右两边小球的转动的半径之比为:_____________。
(3) 另有一实验小组通过如下图所示装置进行实验。
质量为m滑块套在水平杆上,随水平杆一起绕竖直杆做匀速圆周运动。力传感器通过细
绳连接滑块,用来测向心力F的大小。滑块上固定一宽度为d的遮光片,光电门可记录
遮光片通过的时间,测得旋转半径为r。为探究向心力与角速度的关系,需要控制滑块质
量m和r保持不变,某次旋转过程中遮光片经过光电门时的遮光时间为Δ t,则角速度
ω=__________。
12.卡文迪什利用如图所示的扭秤实验装置测量了引力常量:
(1) 本实验原理主要利用了________法
A.控制变量 B.理想模型 C.微量放大 D.微元法
(2) 该实验也被称为“称量地球质量”的实验,是因为测出G后,可结合地球表面的重力加速
度g、地球半径R计算出地球的质量M =___________。
(3) 横梁一端固定有一质量为m半径为r的均匀铅球A,旁边有一质量为m,半径为r的相同
铅球B,A、B两球表面的最近距离L,已知引力常量为G,则A、B两球间的万有引力大
{#{QQABIYApxwCYkIQACY77U0VICQkYkJGRJIgOQRAUOAQiCRNIBAA=}#}小为F=________;
(4) 为了测量石英丝极微小的扭转角,该实验装置中采取的措施是________。
A.增大石英丝的直径 B.增大刻度尺与平面镜的距离
C.利用平面镜对光线的反射 D.减小T型架横梁的长度
三、计算题(本题共3小题,共39分。解答应写出必要的文字说明、方程式和重要演算步
骤。只写出最后答案的不能得分。有数值计算的题,答案中必须明确写出数值和单位。)
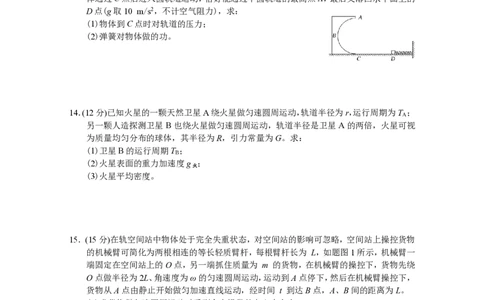
13.(12分)如图所示,一固定在竖直平面内的光滑半圆形轨道ABC,半径为R=0.5 m,轨道
在最低点C处与粗糙的水平面相切,在D处有一质量m=1 kg的小物体压缩着弹簧,在
弹力的作用下以一定的初速度水平向左运动,物体与水平面间的动摩擦因数为 0.25,物
体通过C点后进入圆轨道运动,恰好能通过半圆轨道的最高点A,最后又落回水平面上的
D点(g取10 m/s2,不计空气阻力),求:
(1)物体到C点时对轨道的压力;
(2)弹簧对物体做的功。
14.(12分)已知火星的一颗天然卫星A绕火星做匀速圆周运动,轨道半径为r,运行周期为T ;
A
另一颗人造探测卫星 B也绕火星做匀速圆周运动,轨道半径是卫星 A的两倍,火星可视
为质量均匀分布的球体,其半径为R,引力常量为G。求:
(1)卫星B的运行周期T ;
B
(2)火星表面的重力加速度g ;
火
(3)火星平均密度。
15.(15分)在轨空间站中物体处于完全失重状态,对空间站的影响可忽略,空间站上操控货物
的机械臂可简化为两根相连的等长轻质臂杆,每根臂杆长为 L,如题图1所示,机械臂一
端固定在空间站上的O点,另一端抓住质量为 m 的货物,在机械臂的操控下,货物先绕
O点做半径为2L、角速度为ω的匀速圆周运动,运动到A点停下,然后在机械臂操控下,
货物从A点由静止开始做匀加速直线运动,经时间 t 到达B点,A、B间的距离为L。
(1)求货物做匀速圆周运动时受到合力提供的向心力大小F ;
n
(2)求货物运动到B点时机械臂对其做功的瞬时功率P。
(3)在机械臂作用下,货物、空间站和地球的位置如题图2所示,它们在同一直线上,货
物与空间站同步做匀速圆周运动,已知空间站轨道半径为 r,货物与空间站中心的距
离为 d,忽略空间站对货物的引力,求货物所受的机械臂作用力与所受的地球引力之
比F ∶F 。
1 2
第4页,共4页
{#{QQABIYApxwCYkIQACY77U0VICQkYkJGRJIgOQRAUOAQiCRNIBAA=}#}

