 夜雨聆风
夜雨聆风





【Unity人群导航插件】Agents Navigation – Crowds 基于 Flow Field 的大规模人群导航方案深度解析
在 Unity 的 AI 导航领域,“少量智能体 + 精细路径规划”一直是主流思路。无论是 NavMeshAgent,还是在其之上叠加的局部避障系统,本质上都是以 Agent 为核心的计算模型。
但一旦场景规模扩大到成百上千、甚至上万单位——例如 RTS、塔防、战斗模拟、战争推演类游戏——这种思路就会迅速撞上性能天花板。
Agents Navigation – Crowds,正是为这种“巨大数量级”场景而生的一套导航扩展方案。
它不是简单优化 NavMesh,而是提供了一条完全不同的路径规划思路:Flow Field(流场)导航,并且从一开始就以 DOTS / ECS / Burst / Job System 为核心设计前提。
本文将从架构和算法层面,系统讲清楚这个插件到底是怎么工作的。
一、插件定位与整体架构
1. 插件在 Agents Navigation 体系中的位置
首先要明确一点:
Agents Navigation – Crowds 并不是一个独立导航系统它是
Agents Navigation的扩展包
也就是说:
-
基础 NavMesh / Agent 框架 仍由 Agents Navigation 提供 -
Crowds 只是新增了一套 “替代型路径计算方案” -
两种 Agent 可以在同一场景中混合使用
这种设计非常关键,它意味着你可以:
-
精英单位 / 英雄 → 传统 NavMesh Agent -
大规模杂兵 / 小兵 → Crowd Flow Agent
而不是被迫“全量替换”。
2. 技术栈与设计前提
Crowds 的整个实现,牢牢建立在以下技术基础之上:
- Unity DOTS / ECS
- C# Job System
- Burst Compiler
- SIMD 数学计算
-
FixedUpdate 驱动逻辑
插件内部几乎所有核心系统都:
-
可并行 -
无 GC -
数据导向(SoA) -
面向 Cache Friendly 访问模式
这决定了它天然就不是“传统 MonoBehaviour 插件”。
二、为什么传统 NavMesh 不适合大规模人群?
在理解 Crowds 之前,必须先看清 NavMesh 的性能瓶颈在哪里。
1. NavMesh 的核心成本模型
传统导航系统中,每个 Agent 都要独立进行:
-
路径搜索(A* / Dijkstra) -
路径修正 -
局部避障(RVO / ORCA 等) -
转向与速度计算
这意味着:
性能成本 ≈ Agent 数量 × 单 Agent 计算成本
当 Agent 数量上升到几百、几千时:
-
即便单个 Agent 很“便宜” -
总体成本也会指数级膨胀
2. 局部避障是最容易“炸”的部分
尤其是在高密度人群中:
-
每个 Agent 都需要感知周围多个邻居 -
相互避让容易出现振荡、卡死、抖动 -
为了解决这些问题,算法复杂度进一步上升
这也是为什么很多 RTS 或塔防项目,最终都会放弃精细避障,转而采用更“粗糙但稳定”的移动方式。
三、Flow Field:Crowds 的核心思想
1. 什么是 Flow Field(流场)?
Flow Field 可以理解为:
一张覆盖整个地图的“方向场”
其核心特征是:
-
地图被离散成规则网格(Grid) -
每个格子只存储一个最佳移动方向向量 -
Agent 不再单独算路径 -
Agent 只需读取当前格子的方向即可移动
换句话说:
路径规划从“Agent 级别”上升到“空间级别”
2. 方向是怎么计算出来的?
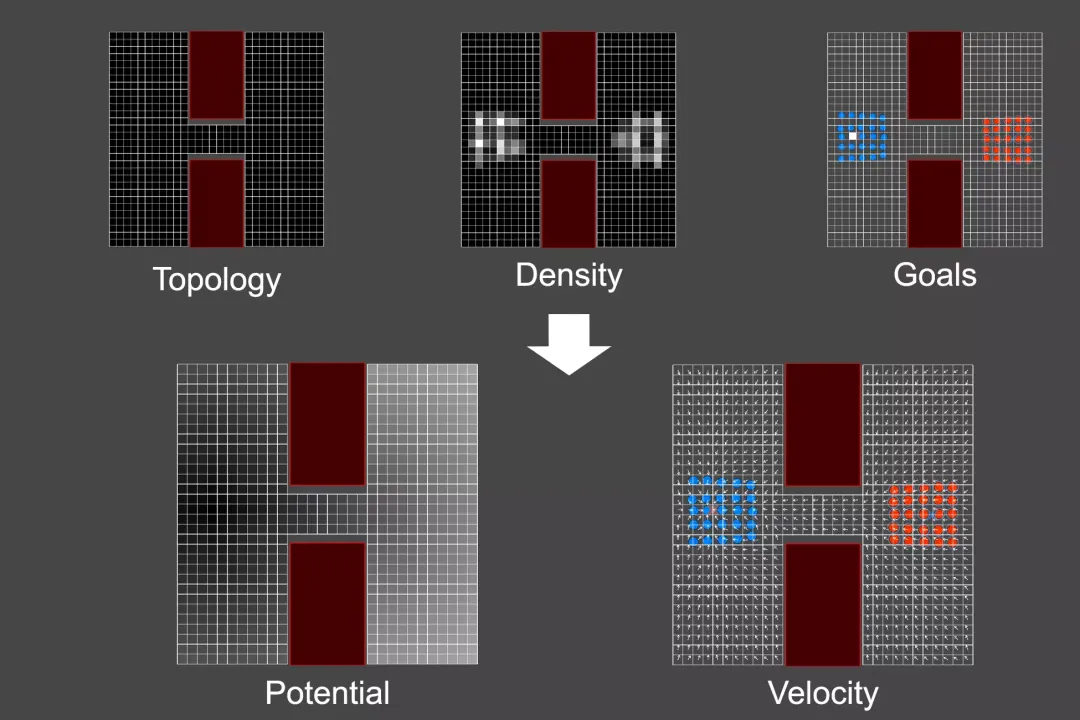
一个完整的 Flow Field 通常包含三层数据:
-
Cost Field(代价场)
-
每个格子的移动成本 -
障碍物 = 无限大 -
地形权重可定制 -
Integration Field(积分场)
-
从目标点开始反向传播 -
每个格子存储“到目标的最小总代价” -
Flow Field(流向场)
-
每个格子指向积分值最低的邻居 -
本质是一个梯度下降方向
Crowds 中正是采用了这套经典结构。
3. Agent 如何使用 Flow Field?
Agent 的行为极其简单:
-
获取当前位置所在的 Grid Cell -
读取该 Cell 的 Flow Direction -
将该方向作为期望速度(Desired Velocity) -
叠加少量物理或动画修正
没有路径缓存、没有路径重算、没有邻居查询。
四、Crowds 性能模型解析
1. 性能成本从“Agent 数量”转移
这是 Crowds 最关键的优势:
性能成本 ≈ Grid 大小 × Group 数量
而不是:
Agent 数量 × 路径复杂度
这带来的直接结果是:
-
100 个 Agent 和 10,000 个 Agent -
在同一 Flow Field 下,几乎没有数量级差异
只要他们:
-
使用相同目标 -
属于同一个 Group
2. Group(群组)是核心概念
Crowds 并不是“完全自由”的系统。
它引入了一个非常重要的约束:
同一 Flow Field = 同一 Group = 同一目标
也就是说:
-
每新增一个目标 -
就需要重新计算一整张 Flow Field
如果 Group 数量失控:
-
性能优势会迅速下降 -
甚至不如传统 NavMesh
这也是插件文档中反复强调的设计前提。
五、Crowd Flow 如何解决避障问题?
1. 路径与避障的“天然融合”
在传统系统中:
-
路径规划:全局 -
避障:局部 -
两者经常互相打架
而 Flow Field 中:
-
障碍物已经体现在 Cost Field 中 -
流向本身就是“避开障碍的结果”
这意味着:
Agent 根本不需要“思考避障”
2. 为什么更不容易卡死?
因为:
-
所有 Agent 在同一格子内方向一致 -
不会出现“你往左我往右”的对冲 -
群体行为趋向“水流”而非“个体博弈”
代价是:
-
Agent 个性被弱化 -
群体行为更明显
但这正是 RTS、塔防、战阵模拟最需要的特性。
六、DOTS / ECS 下的系统拆分
从架构上看,Crowds 采用了高度模块化的 ECS 系统设计:
1. 核心系统类型
-
Grid 构建系统 -
Cost Field 计算系统 -
Integration Field 扩散系统 -
Flow Direction 生成系统 -
Agent Movement 系统
每个系统:
-
运行在 FixedUpdate -
可独立 Job 化 -
支持 Burst 编译
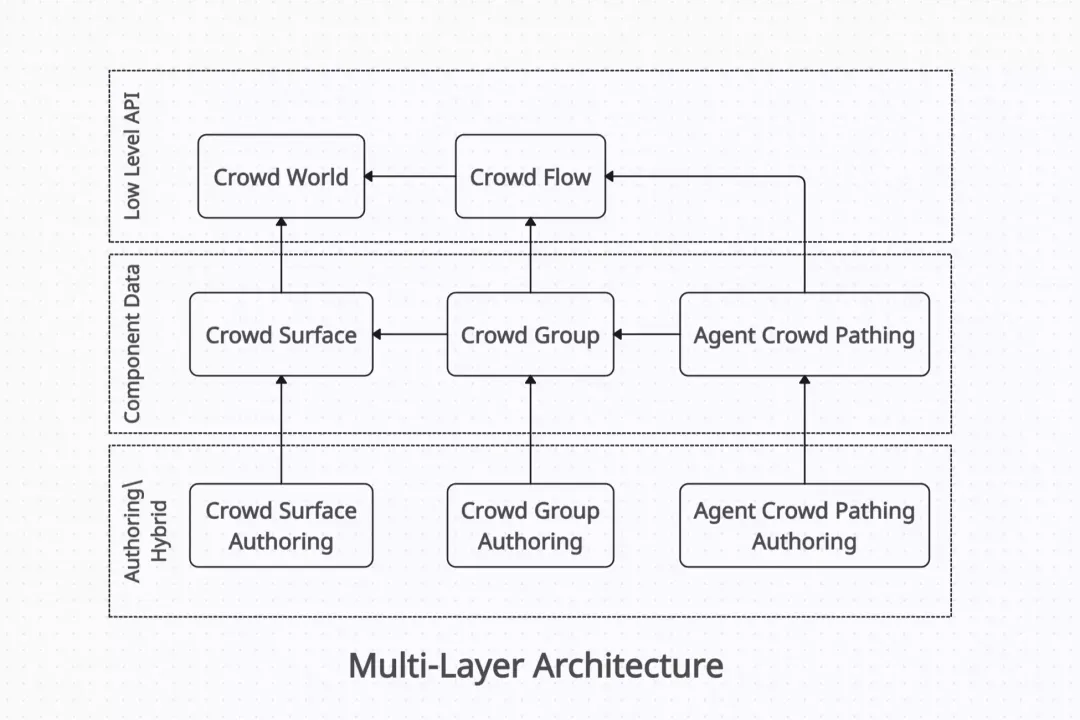
2. 多层 API 设计
插件提供了:
- 低层 ECS API
:用于深度定制、自定义行为 - 中层行为模块
:常见 crowd 行为的组合 - 高层 Hybrid 接口
:面向 GameObject 使用者
这也是它能同时支持:
-
纯 ECS 项目 -
传统 OOP 项目
的关键原因。
七、Hybrid 模式:非 ECS 项目的现实选择
1. GameObject 与 Entity 同步
Hybrid 模式下:
-
GameObject 作为“表现层” -
Entity 作为“逻辑与计算层” -
Transform 数据在两者之间同步
你可以:
-
用 Animator、MonoBehaviour -
但把最重的导航计算交给 ECS
2. 性能代价与使用建议
官方也非常坦率:
-
Hybrid ≠ 免费性能 -
同步本身有成本
但即便如此:
-
在 500+ Agent 规模下 -
仍然远优于纯 NavMesh
八、适用游戏类型总结
Crowds 并不是“万能导航方案”,它非常明确地偏向以下类型:
-
塔防(大量单位涌向同一目标) -
RTS(编队、集群推进) -
战斗模拟(战线、阵型) -
城市人群模拟
不太适合:
-
小规模精细 AI -
高度个性化路径行为 -
强个体智能需求的 RPG
九、总结:这不是“更快的 NavMesh”
Agents Navigation – Crowds 的本质并不是优化,而是范式转换。
它用 Flow Field 把问题从:
“我该怎么让每个 Agent 更聪明?”
变成:
“我该怎么让空间本身更有引导性?”
如果你正在做的,是真正意义上的“大规模单位”游戏,并且已经开始被 NavMesh 性能拖后腿,那么 Crowds 很可能就是你一直在找的那条路。
它要求你:
-
接受群体优先于个体 -
接受目标共享 -
接受 DOTS 思维方式
但作为回报,它能带来的是:
数量级级别的性能提升与稳定性飞跃。
资源获取方式:公众号主页
