 夜雨聆风
夜雨聆风





【Unity 反向运动学插件】Final IK 一套完整的IK解决方案
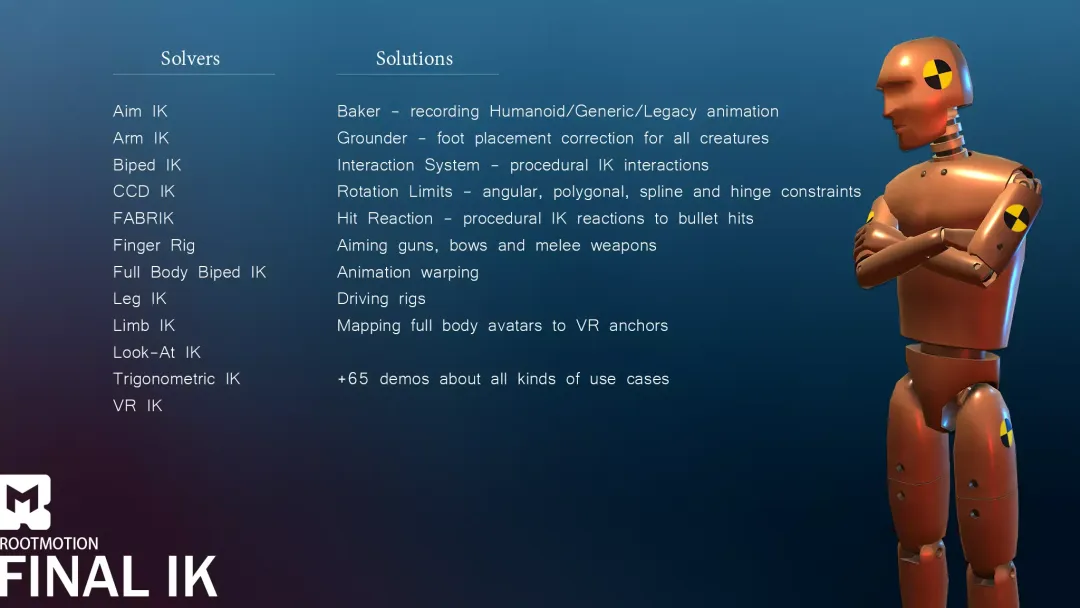
Final IK 是由 RootMotion 开发的一套完整的 Unity 反向运动学(IK)解决方案合集。它几乎涵盖了游戏开发中所有常见的 IK 需求,从基础的肢体 IK,到全身 IK、VR 全身驱动、武器瞄准、视线跟随、脚部贴地修正、交互系统,再到动画烘焙工具,形成了一套系统化、模块化的 IK 工具链。
插件包含完整源码,基于 C# 编写,命名空间统一为 RootMotion 和 RootMotion.FinalIK,可无缝集成至现有项目,且无需 Unity Pro。它既可以与 Mecanim 协同工作,也可以脱离 Animator 单独运行,适配 Humanoid、Generic、Legacy 多种动画体系。
如果你正在做角色驱动类游戏、动作游戏、射击游戏或 VR 项目,Final IK 基本可以覆盖所有 IK 场景需求。
IK 的核心原理解析
在理解 Final IK 之前,我们先明确 IK 的本质。
正向运动学(FK)与反向运动学(IK)
- FK(Forward Kinematics)
:从父骨骼到子骨骼逐级计算变换。 - IK(Inverse Kinematics)
:给定末端目标位置,反推出中间骨骼的旋转。
例如:
-
FK:肩 → 肘 → 手 -
IK:给定“手”的目标位置 → 计算肩和肘的旋转
IK 的核心问题是:
在多关节链条中,如何根据末端目标,计算每个关节的旋转,使末端精确到达目标点?
Final IK 中不同 Solver(求解器)采用不同数学方法来解决这个问题。
核心 IK 求解算法解析
一、CCD(Cyclic Coordinate Descent)IK
CCD 是一种经典的迭代型 IK 算法。
原理:
-
从末端骨骼开始 -
逐级向上遍历 -
调整当前骨骼旋转,使末端更接近目标 -
重复多次直到误差足够小
数学本质:
-
每个关节旋转一个角度 -
让末端向目标方向旋转 -
局部优化逐步逼近全局解
优点:
-
实现简单 -
适合多关节链 -
计算量可控
缺点:
-
可能出现抖动 -
收敛速度依赖迭代次数
Final IK 的 CCD 求解器支持:
-
旋转限制(Angular / Polygonal / Hinge) -
多线程版本 CCDIKJ(基于 AnimationJobs)
二、FABRIK(Forward And Backward Reaching IK)
FABRIK 是目前主流高效 IK 算法之一。
原理:
与 CCD 不同,FABRIK 不基于旋转角度计算,而是直接基于“骨骼位置”。
算法分两步:
-
Forward 阶段:
-
从末端开始向根部移动 -
强制末端对齐目标 -
保持每段骨骼长度不变 -
Backward 阶段:
-
从根部向末端回推 -
固定根部位置 -
重新约束骨骼长度
通过多次前后迭代收敛。
优点:
-
收敛速度快 -
稳定性高 -
不依赖角度解算
Final IK 中的 Multi-effector FABRIK 甚至支持:
-
多目标控制 -
多链条组合
这在复杂角色或触手类结构中非常重要。
三、Full Body IK(全身 IK)
这是 Final IK 的核心系统之一。
工作原理
Full Body IK 本质是:
-
将整个骨架视为一个整体约束系统 -
同时处理多个 Effector(手、脚、头、身体) -
在满足目标位置的前提下,维持骨骼合理姿态
内部实现逻辑:
-
采集所有 Effector 目标 -
建立骨骼链层级关系 -
计算权重(Weight) -
通过迭代方式分布误差 -
最终统一求解
这属于“多约束 IK 系统”。
特点:
-
支持身体偏移 -
支持脊椎弯曲 -
支持多点驱动 -
支持姿态平衡
相比单链 IK,它更像是“物理近似系统”。
四、VRIK(专用于 VR 的全身求解器)
VRIK 是专为 VR 设计的高性能全身 IK。
VR 的核心问题是:
-
只有头部和双手是被真实追踪的 -
身体其他部分需要“推算”
VRIK 的核心逻辑:
-
头部 = HMD 位置 -
双手 = 控制器位置 -
计算肩膀、脊椎、骨盆位置 -
推算腿部站姿 -
保持身体自然平衡
它采用:
-
姿态预测 -
动态权重平衡 -
重心调整 -
脊椎分段插值
目标是:
在保证实时性能的情况下,让虚拟角色的身体运动符合真实人体结构逻辑。
这也是它能在 VR 中保持高帧率的关键。
Grounder 系统原理
Grounder 是自动脚部贴地系统。
核心逻辑:
-
射线检测地面 -
计算脚底与地面的高度差 -
调整脚部 IK 目标 -
修正骨盆高度 -
保持双脚自然接触地面
关键技术:
-
动态权重调整 -
步态同步 -
平滑过渡
避免问题:
-
脚穿地 -
脚悬空 -
坡面错位
这套系统通常与 Leg IK 或 Full Body IK 联动。
LookAt IK 与 Aim IK
LookAt IK
工作流程:
-
计算头部到目标的方向向量
-
分配旋转权重至:
-
颈椎 -
胸椎 -
头骨 -
限制旋转范围
核心是:
多骨骼分布式旋转
避免头部突然转动。
Aim IK
用于武器瞄准。
原理:
-
确定枪口朝向 -
计算目标方向 -
修正肩部、手臂骨骼旋转 -
结合 Rotation Constraints 防止不自然扭曲
支持:
-
多线程 AnimationJobs 版本(AimIKJ) -
武器后坐力系统结合
Rotation Constraints(旋转限制系统)
IK 的难点在于:
数学上可行 ≠ 生物学合理
Final IK 提供四种限制:
-
Angular -
Polygonal(Reach Cone) -
Spline -
Hinge
原理:
-
在求解前后进行角度裁剪 -
或将旋转映射到允许空间内
这保证了角色动作自然性。
Baker 动画烘焙系统
IK 是运行时动态计算。
但有些场景:
-
希望导出动画 -
希望节省性能 -
希望用于 Timeline
Baker 的工作原理:
-
在运行时执行 IK -
记录每帧骨骼变换 -
写入动画曲线 -
生成 AnimationClip
支持:
-
Humanoid -
Generic -
Legacy
这等于把“程序动画”转为“传统动画”。
Interaction System 原理
Interaction System 本质是:
事件驱动的 IK 动作系统
流程:
-
定义交互点 -
角色接近触发 -
计算手部 IK 目标 -
执行动画混合 -
完成交互
典型应用:
-
开门 -
拾取物体 -
按按钮
内部机制是:
-
IK 权重渐变 -
动画层混合 -
事件回调
多线程 AnimationJobs 版本
CCDIKJ 和 AimIKJ 基于 Unity AnimationJobs。
优势:
-
在动画系统内部执行 -
多线程运行 -
更低主线程压力 -
更适合大量角色
这对大型项目尤为重要。
性能与架构设计
Final IK 的设计特点:
-
模块化架构 -
每个 Solver 独立运行 -
可组合多系统 -
支持自定义扩展
性能优化点:
-
可控迭代次数 -
局部求解 -
权重裁剪 -
多线程支持
在移动端与 VR 项目中表现稳定。
总结
Final IK 不只是一个 IK 插件。
它本质是一套:
可扩展、多算法、全身级别的运动求解框架。
从数学算法(CCD、FABRIK),到全身约束系统,再到 VR 驱动与动画烘焙,它构建了一整套完整的角色控制体系。
如果你的项目涉及:
-
高质量动作表现 -
程序化动画 -
VR 角色驱动 -
射击瞄准系统 -
地形适配 -
动态交互
Final IK 几乎是 Unity 生态中最成熟、最系统化的 IK 解决方案。
