 夜雨聆风
夜雨聆风





【MATLAB源码】FMCW:雷达信号处理教科书级仿真平台
📡 FMCW 雷达信号处理教科书级仿真平台
完整链路逐模块实现 · MATLAB 纯基础函数实现 · 教学与工程双场景可复现支持 FMCW 主链路 + 脉冲多普勒 + 相参/非相参积累对比
📌 为什么选择本仿真平台?
想讲清楚雷达处理链路时,常见问题是“公式和代码脱节、模块耦合重、结果不稳定、图像不好复现”。 本平台围绕 可解释、可运行、可验证 设计,主打从信号到点云的完整闭环。
|
|
|
|
|
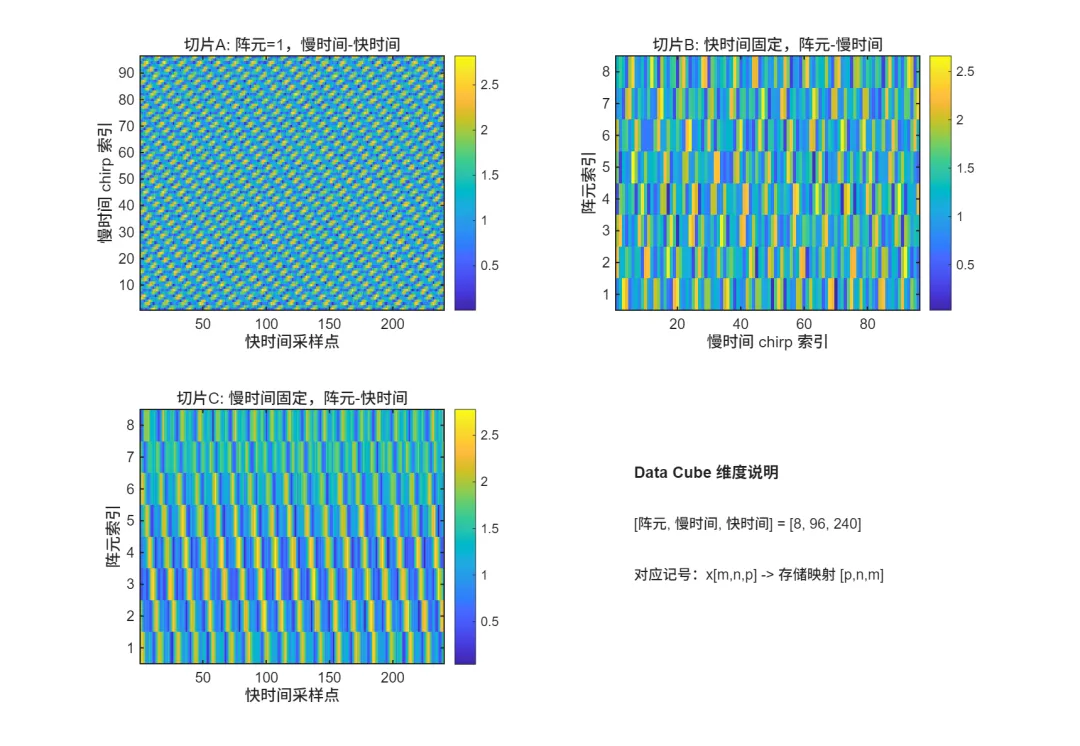
chirp -> IF -> data cube -> RD -> angle -> CFAR -> 点云 |
|
|
x[m,n,p],存储 [p,n,m] |
|
|
|
|
|
png+fig+results.mat |
|
|
checkcode + 冒烟检查 双重验证入口 |
🎯 核心价值
🔬 学术研究价值
-
• 链路完整:FMCW 主处理、脉冲多普勒、积累增益三条演示链路并存。 -
• 公式可对齐:关键相位项、FFT 维度、CFAR 门限均可映射到标准雷达信号处理表达。 -
• 教学友好:一键脚本生成 8 类关键图,适合课堂讲解与实验报告。 -
• 参数集中化: default_config.m管理关键系统参数,便于敏感性分析。
💼 工程应用价值
-
• 模块解耦: config/core/processing/utils/tests清晰分层。 -
• 结果可复现:输出目录按时间戳归档,便于版本对比与追踪。 -
• 易集成:函数接口统一,便于接入更大链路级仿真工程。 -
• 质量可控:静态检查与冒烟检查可快速评估当前版本可运行性。
⚡ 技术亮点
🏗️ 完整模块架构
RadarSignal/ ├── README.md ├── Plan.md ├── 项目文档.md ├── docs/ │ ├── 算法文档.md │ └── 代码文档.md └── matlab/ ├── run_demo_all.m # 一键运行入口 │ ├── config/ │ └── default_config.m # 统一配置中心 │ ├── core/ │ ├── generate_fmcw_chirp.m # FMCW 发射信号生成 │ ├── simulate_fmcw_scene.m # IF 场景建模与噪声注入 │ └── build_data_cube.m # 三维 Data Cube 组织 │ ├── processing/ │ ├── range_doppler_fft.m # 距离-多普勒处理 │ ├── angle_estimation_fft.m # 阵元维角度估计 │ ├── cfar_2d_ca.m # 二维 CA-CFAR │ ├── build_point_cloud.m # 检测点 -> 点云映射 │ ├── pulse_doppler_demo.m # 脉冲多普勒演示 │ └── coherent_integration_demo.m # 相参/非相参积累对比 │ ├── utils/ │ ├── make_output_dir.m # 输出目录管理 │ ├── save_figure_auto.m # 图像自动保存 │ └── plot_helpers.m # 绘图风格设置 │ ├── tests/ │ └── run_static_checks.m # checkcode + 冒烟检查 │ └── outputs/ └── radar_demo_YYYYMMDD_HHMMSS/ # 结果归档目录📊 关键结果实测(默认参数)
|
|
|
|
|
|
checkcode
|
|
|
|
smoke_ok = true |
|
|
pc.count = 51 |
|
|
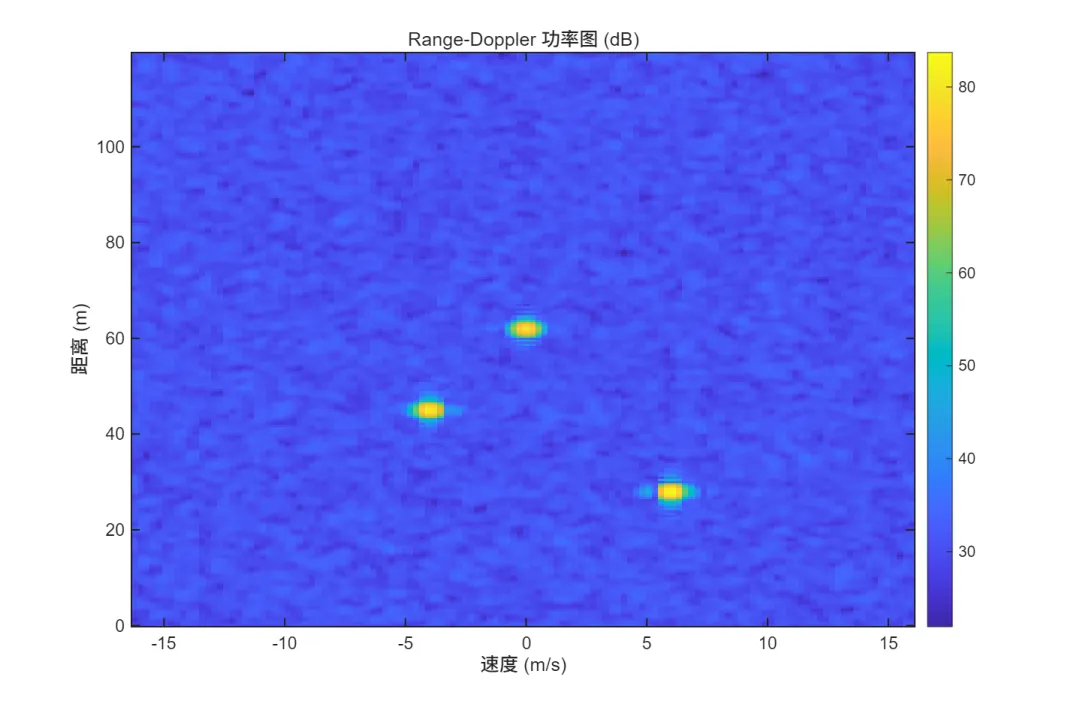
R=28.11 m, v=6.08 m/s |
|
|
R=44.97 m, v=-4.06 m/s |
|
|
R=61.83 m, v=0.00 m/s |
数据来源:
Plan.md中 Gate E 修复后验证记录。
💻 核心代码展示
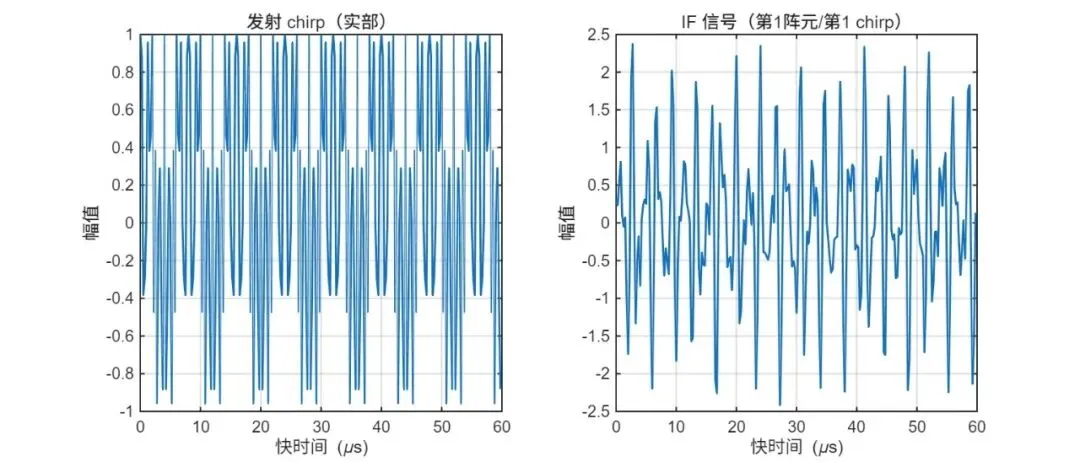
🔥 多目标 IF 建模(simulate_fmcw_scene.m)
% 距离拍频与多普勒频移 f_r = 2 * slope * R / c; f_d = 2 * v / lambda; % 快时间相位项(range beat) % 与“保留正频半谱”策略一致,采用正拍频符号 phase_fast = 2 * pi * f_r .* t_fast; % 慢时间相位项(doppler) phase_slow = 2 * pi * f_d .* t_slow; for p = 1:num_ant phase_ant = 2 * pi * ((p - 1) * d * sin(theta) / lambda); phase_nd = phase_slow + phase_const + phase_ant; phase_2d = bsxfun(@plus, phase_nd(:), phase_fast); target_if = amp * exp(1j * phase_2d); ... end🚀 二维 CA-CFAR 检测(cfar_2d_ca.m)
num_total = (2 * win_r + 1) * (2 * win_d + 1); num_guard = (2 * gr + 1) * (2 * gd + 1); num_train = num_total - num_guard; alpha = num_train * (pfa^(-1 / num_train) - 1); for r = r_start:r_stop for d = d_start:d_stop block = rd_power((r - win_r):(r + win_r), (d - win_d):(d + win_d)); guard = rd_power((r - gr):(r + gr), (d - gd):(d + gd)); noise_sum = sum(block(:)) - sum(guard(:)); noise_mean = noise_sum / num_train; threshold = alpha * noise_mean; thr_map(r, d) = threshold; snr_db = 10 * log10(rd_power(r, d) / (noise_mean + eps)); if rd_power(r, d) > threshold && snr_db >= cfar_cfg.min_snr_db det_mask(r, d) = true; end end end🎬 一键运行
cd('D:/10_存储库/OneDrive/15.代码归档/01.施工中/RadarSignal/matlab'); run_demo_all;cd('D:/10_存储库/OneDrive/15.代码归档/01.施工中/RadarSignal/matlab/tests'); report = run_static_checks(); disp(report);输出预览
[RadarSignal] 输出目录: .../matlab/outputs/radar_demo_20260306_082736 [RadarSignal] 演示完成,输出已保存。 [RadarSignal] 图像与结果文件:.../radar_demo_20260306_082736 输出文件(共17个): - 01~08 图像: 每类各 1 份 PNG + 1 份 FIG - results.mat: cfg/cube/RD/CFAR/pointcloud/pd/ci 等关键结果处理流程总览 ┌───────────────────────────────────────────────────────────────┐ │ chirp生成 -> IF建模 -> Data Cube -> Range FFT -> Doppler FFT │ │ -> Angle FFT -> 2D CA-CFAR -> 点云映射 │ └───────────────────────────────────────────────────────────────┘示例输出图(默认参数):
🖥️ 运行环境
-
• MATLAB 版本:R2020a 或更高版本(建议 R2025b 及以上) -
• 依赖工具箱:无强依赖(核心流程使用基础 MATLAB 函数) -
• 操作系统:Windows / Linux / macOS 均可
