 夜雨聆风
夜雨聆风





又在神器上添了这些和ROS交互的功能
一、系统概述
本平台是一套基于 Web 的 ROS2 机器人任务管理系统,集成了 SLAM 建图、重定位导航、路径规划 和 3D 地图可视化 四大核心功能。通过 MQTT 通信协议与机器人后端交互,提供直观的图形化操作界面,支持从建图到导航的全流程自动化任务管理。该系统已经适配工控机和RK3588.
核心特性:
-
🗺️ 支持 Fast-LIO 实时 3D 建图与 HDL Localization 精确定位
-
🛰️ 基于 MQTT 的实时双向通信,支持远程监控
-
🎯 可视化路径规划与航点管理
-
🌐 3D 点云实时渲染与多视角查看
二、系统面板
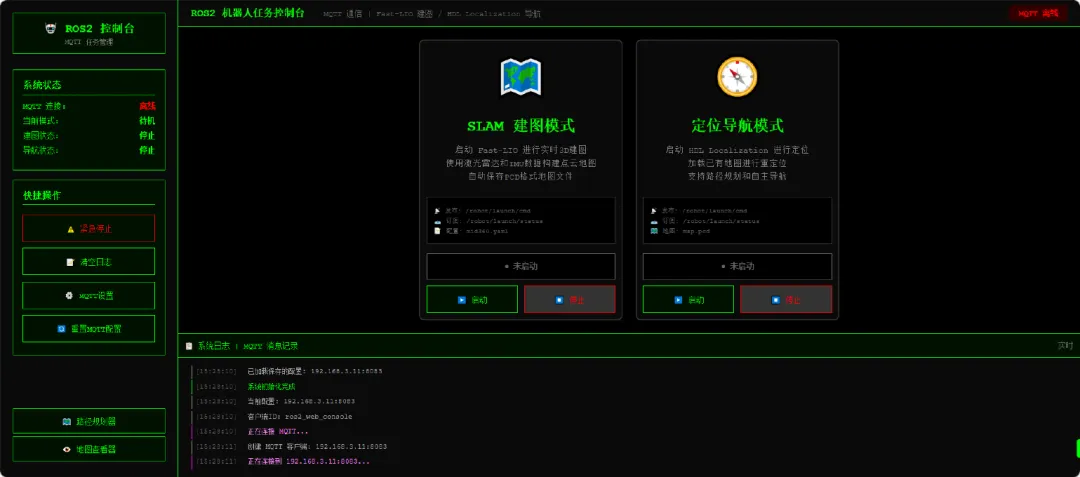

A. SLAM 建图模式
-
功能: 启动 Fast-LIO 算法进行实时 3D 点云建图
-
数据输入: 激光雷达 + IMU 数据
-
数据输出: 自动保存 PCD 格式点云地图文件
-
ROS 话题:
-
发布:
/robot/launch/cmd -
订阅:
/robot/launch/status -
配置:
mid360.yaml
B. 定位导航模式
-
功能: 启动 HDL Localization 进行重定位
-
数据输入: 加载已有 PCD 地图文件(
map.pcd) -
功能支持: 路径规划、自主导航、重定位
-
ROS 话题:
-
发布:
/robot/launch/cmd -
订阅:
/robot/launch/status
C. 系统
-
🚨 紧急停止: 立即停止所有机器人运动(红色警示按钮)
-
📝 清空日志: 清除系统运行日志
-
⚙️ MQTT 设置: 配置通信参数(默认:
192.168.3.11:8083) -
🔄 重置 MQTT: 恢复默认通信配置
-
实时显示系统运行日志与 MQTT 消息记录
-
时间戳标记,支持调试与故障排
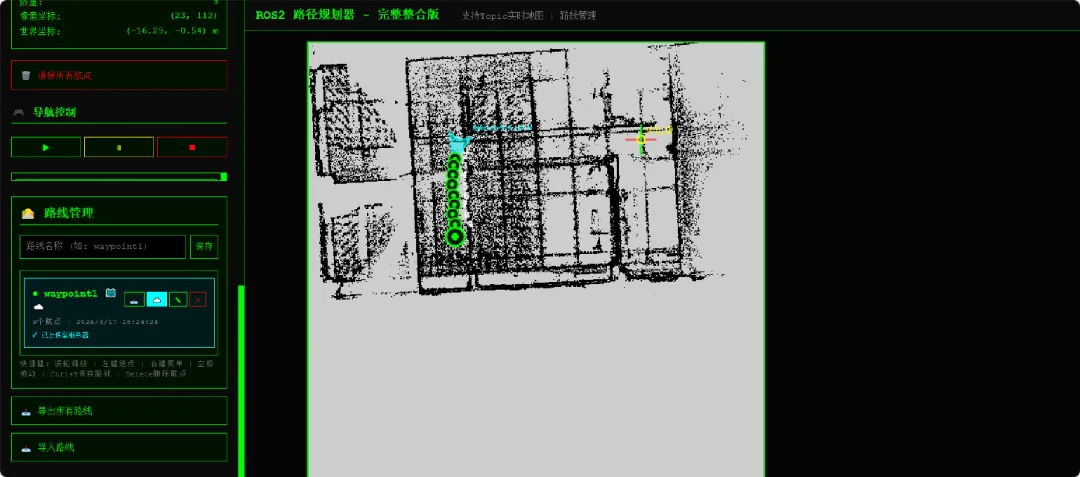
地图交互区(主显示区)
-
实时地图显示: 支持 Topic 实时订阅地图数据
-
坐标显示:
-
像素坐标:
(23, 112) -
世界坐标:
(-16.29, -0.54) m -
航点标记: 绿色圆圈表示路径点,红色标记表示目标点
路线管理(左侧面板)
-
🗑️ 清除所有航点: 一键清空当前地图上的所有标记点
-
💾 路线保存:
-
支持自定义路线名称(如:
waypoint1) -
显示航点数量与创建时间(例:
9个航点 | 2026/3/17 15:24:26) -
状态指示: 绿色对勾表示”已上传至服务器”
-
📂 导出所有路线: 批量导出路线数据
-
📥 导入路线: 加载历史保存的路线文件
-
滚轮: 地图缩放
-
左键: 选取/添加航点
-
右键: 打开功能菜单
-
空格 + 拖动: 平移地图视图
-
Ctrl+S: 快速保存当前路线
-
Delete: 删除选中航点
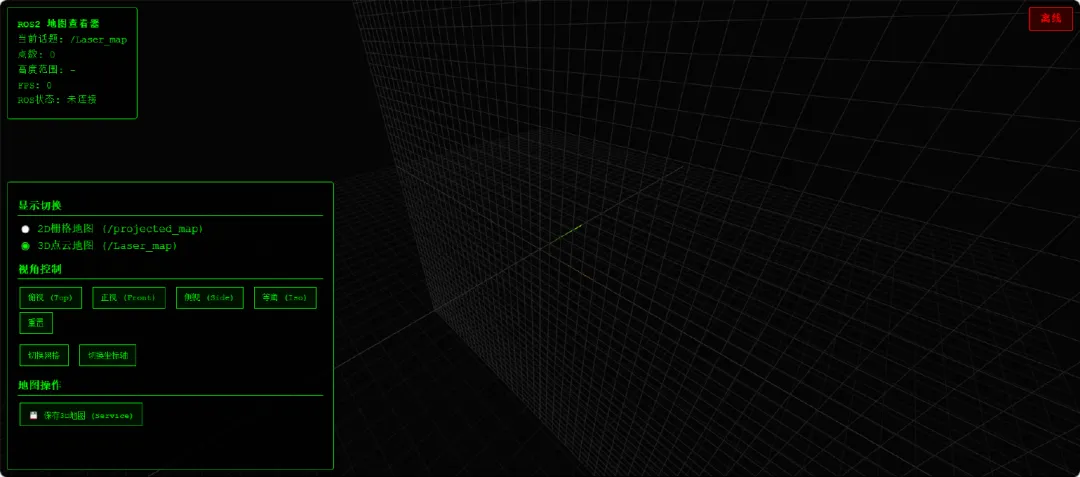
专业的 3D 点云可视化工具,支持大尺度点云数据的实时渲染。
数据显示(左上角)
-
当前话题:
/laser_map(实时点云话题) -
点数统计: 当前显示点云数量
-
高度范围: 点云 Z 轴范围
-
FPS: 渲染帧率
-
ROS 状态: 连接状态(未连接/已连接)
显示切换
-
2D 栅格地图:
/projected_map(俯视图投影) -
3D 点云地图:
/laser_map(三维点云)
视角控制
提供标准 3D 视图操作:
-
俯视 (Top): 顶视图,适合全局观察
-
正视 (Front): 前视图
-
侧视 (Side): 侧视图
-
等角 (Iso): 等轴测视图
-
重置: 恢复默认视角
视觉辅助
-
切换网格: 显示/隐藏参考网格
-
切换坐标轴: 显示/隐藏 XYZ 坐标轴
地图操作
-
💾 保存 3D 地图: 调用 ROS Service 保存当前点云为 PCD 文件
三、标准使用流程
场景 A:新建地图并导航(首次使用)
-
启动建图
-
进入”任务控制台”
-
点击 SLAM 建图模式下的”启动”按钮
-
控制机器人移动,观察 3D 地图逐渐生成
-
保存地图
-
进入”地图查看器”确认地图质量
-
点击”保存 3D 地图”按钮
-
文件将保存为
map.pcd -
切换导航模式
-
返回任务控制台,停止建图
-
启动”定位导航模式”,加载刚保存的
map.pcd -
规划路径
-
打开”路径规划器”
-
在地图上左键点击添加航点
-
Ctrl+S 保存路线(如:
inspection_route_1) -
执行任务
-
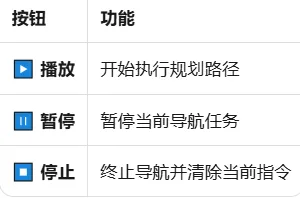
点击导航控制栏的”▶️ 播放”按钮
-
机器人将按规划路径自主运行
场景 B:执行已有任务
-
启动定位导航模式
-
打开路径规划器 → 导入路线
-
选择历史路线文件
-
点击播放开始导航