夜雨聆风
夜雨聆风





FANUC-线追踪指令说明(二)
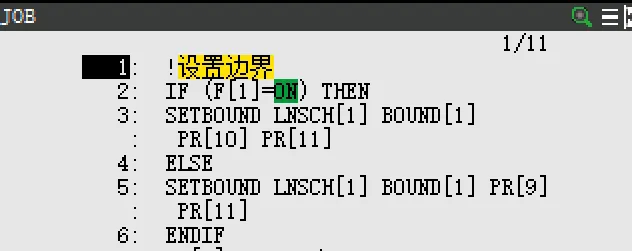
8.设置边界
通过位置寄存器位置信息设置追踪参数表中的边界。
位置寄存器在世界坐标系下记录点位即可。此指令会自动转化计算出追踪坐标系下的上下边界值。

案例:
可通过此指令切换边界范围,比如涉及产品切换问题,或者是机器人运动区域限制等。
此指令可以在追踪轨迹程序运行时执行。这其实也意味着,在追踪程序运行时,手动修改边界也是可以的,只是比较危险。
案例演示如视频:
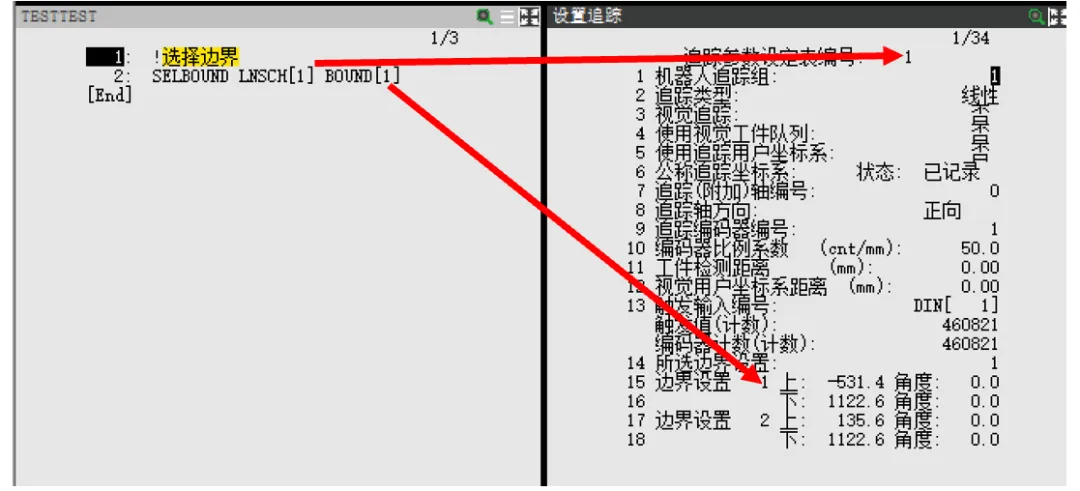
9.选择边界
选择所使用的追踪参数表下的边界。
案例:
此指令和上述“设置边界”使用功能结果是一样的。只是“边界选择”指令,需要预设边界,且边界数量有限。而“设置边界”参数存储在位置寄存器,边界实际使用的是同一个,这样数量上理论可以近乎无限。(如果用P点存储位置,使用时赋值给位置寄存器)。

10.设置极限
此指令暂未寻得相关说明。
通过仿真验证研究,位置寄存器实际仅其Y轴值对设置有效(可能是因为Y轴与传送带方向平行)。

并且发现,此值主要影响上游边界。此项指令运行后,设置的上游边界不再有效。但未寻得实际的参数设置意义及规律。
仿真效果视频如下。有知道的欢迎留言分享。
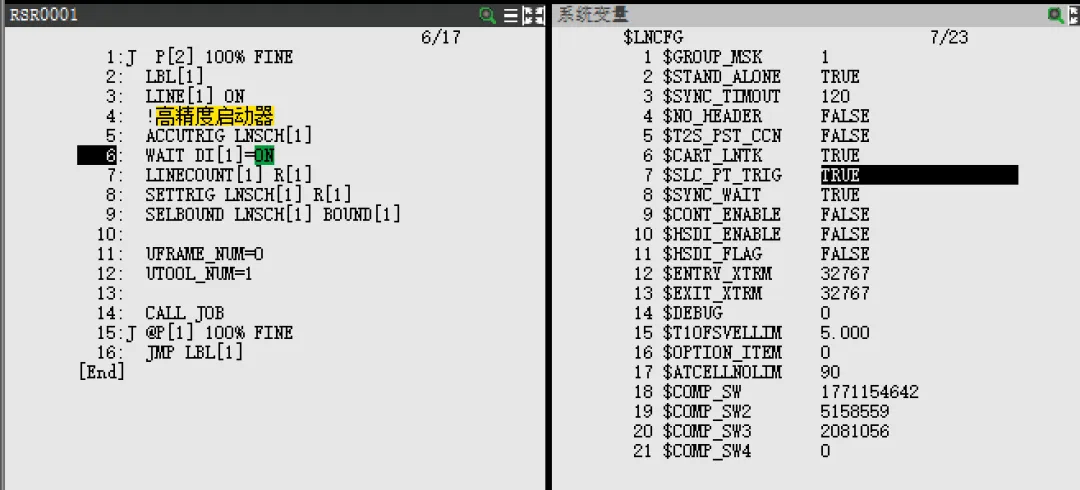
11.高精度启动器
可以触发设定更精确的脉冲触发值。
该指令会激活一个中断程序,以便在DI触发时设定系统时间。此后第一条LINECOUNT指令会利用这一系统时间来获取对应于该时间点时的编码器计数。
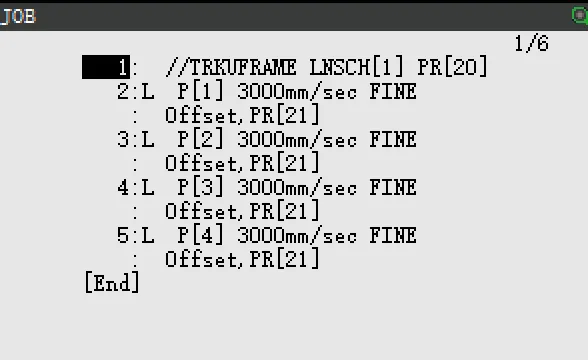
故此指令需要使用在信号触发语句前,如下案例。
使用时,需要先将变量$LNCFG.$SLC_PT_TRIG置为TRUE。否则运行时,会出现LNTK-051报警。

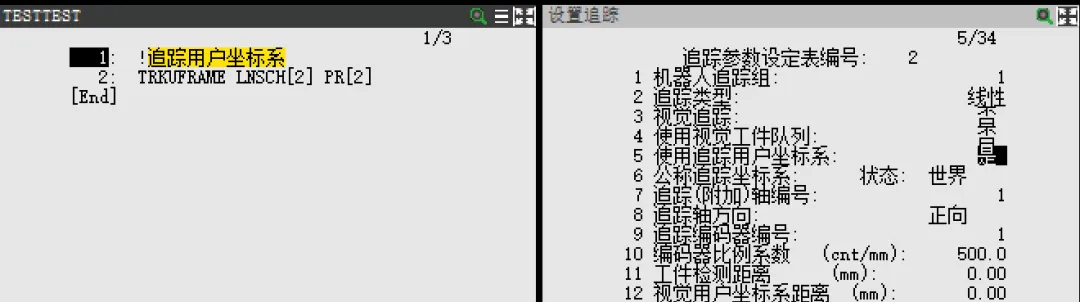
12.追踪用户坐标系
类似于偏移指令效果。本质是追踪用户坐标的偏移。位置寄存器为偏移值。
使用此指令时,需要将追踪参数表中的“5使用追踪用户坐标系”设置为“是”。
否则运行时会出现LNTK-039报警。
这个指令运行后,是将指定位置寄存器里的值直接写入功能内部。如果单纯修改位置寄存器的值,但是指令未运行,更新,不会有改变。
如果需要禁用,或者最后一次运行此指令的位置寄存器值清零,或者将追踪参数表中的“5 使用追踪用户坐标系”设置为“否”。
相当于用户偏移OFFSET(相对于追踪坐标系)。不过,仿真测试,仅XYZ方向补正效果相同。不建议WPR的偏移补正。
仿真视频如下:
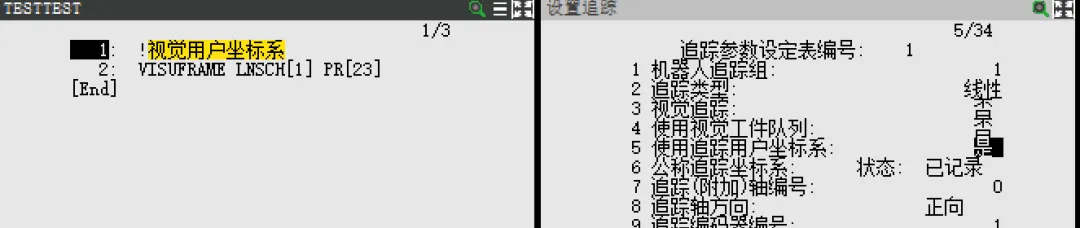
13.视觉用户坐标系
虽然称为视觉用户坐标系,但是和视觉没有任何关系。
就是将指定编号的位置寄存器值作为追踪坐标系。从而也能像“追踪用户坐标系”一样,调整轨迹位置。本质是追踪坐标系的定义。位置寄存器就是追踪坐标系(所以是世界坐标系下的点位)。
使用此指令时,需要将追踪参数表中的“5使用追踪用户坐标系”设置为“是”。
否则运行时会出现LNTK-039报警。
这个指令运行后,是将指定位置寄存器里的值直接写入功能内部。如果单纯修改位置寄存器的值,但是指令未运行,更新,不会有改变。
如果需要禁用,或者最后一次运行此指令的位置寄存器值清零,或者将追踪参数表中的“5 使用追踪用户坐标系”设置为“否”。
14.停止追踪
使机器人停止追踪,具体说明,回顾下方文章。
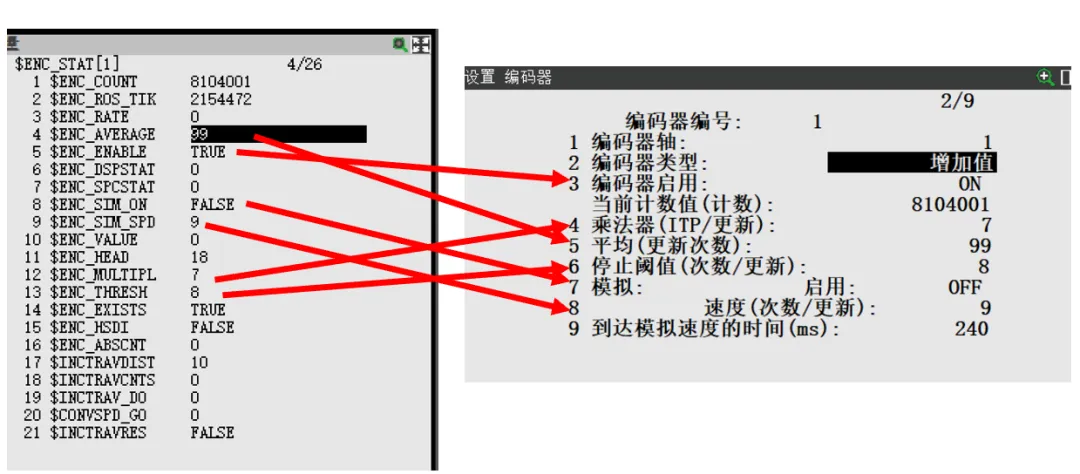
15.定义编码器
将变量$LNSNRSCH[*]表内容复制到$ENC_STAT[*]中(没想到这样的实际意义是啥)。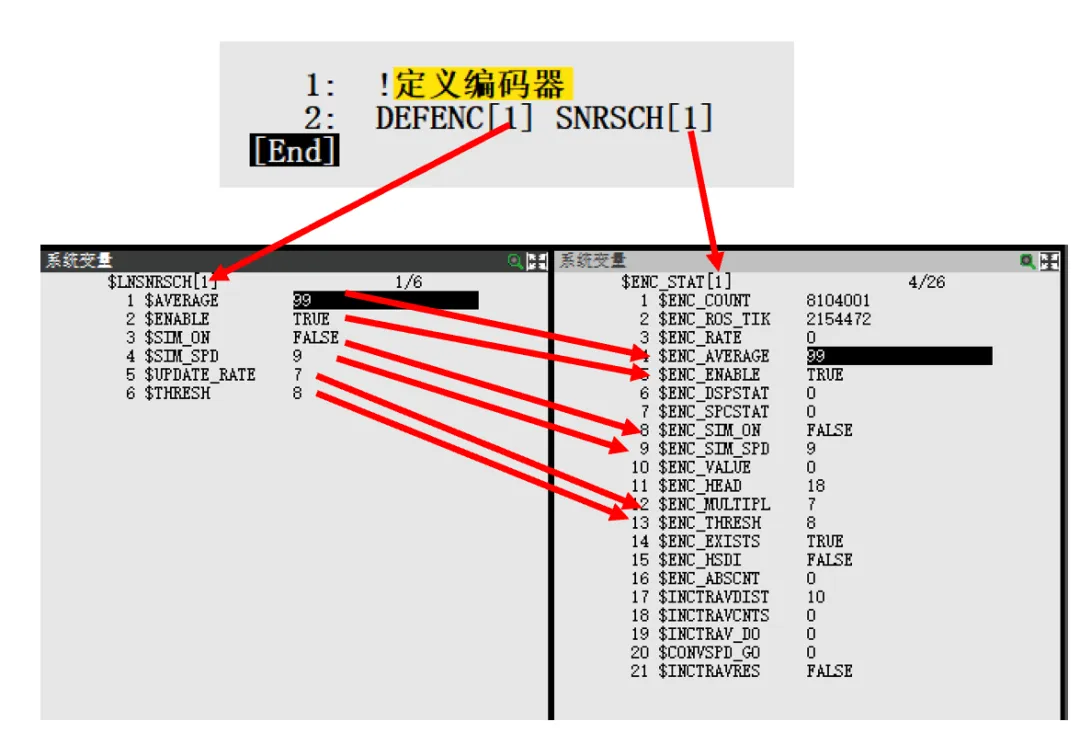
编码器表内容实际和$ENC_STAT[*]关联,就是直接修改$ENC_STAT[*]值,编码器表内容就会立刻对应更改。但是$LNSNRSCH[*]内容无法直接定义编码器表内容。