 夜雨聆风
夜雨聆风





【MATLAB源码】感知:CFAR 检测算法库
CFAR 检测算法库
面向雷达目标检测的 CFAR 算法与评估工具箱
统一接口与评估脚本,快速对比多类 CFAR 算法
【CFAR】【雷达检测】【虚警控制】【MATLAB】
📌 为什么选择
项目聚焦雷达检测中的虚警控制与多目标鲁棒性。提供从门限系数求解到检测与评估的完整链路。适合教学、对比与工程验证。
|
|
|
|---|---|
|
|
cfar_detect_xx 结构化输出 |
|
|
|
|
|
|
|
|
|
|
|
|
🎯 核心价值
🔬 学术研究价值
面向算法机理与对比研究的统一实现。
-
统一公式对齐 -
完整算法谱系 -
可复现实验 -
结构化输出
💼 工程应用价值
面向工程评估的轻量可用工具集。
-
接口一致性 -
参数可控性 -
脚本即用性 -
边界处理统一
⚡ 技术亮点
🌊 CA 与鲁棒 CFAR 对比
|
|
|
|
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
📊 性能指标(实测数据)
数据来源:evaluation 脚本的蒙特卡洛仿真曲线
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
🎯 多目标鲁棒检测能力
强调在强回波干扰下的稳定门限估计能力。
|
|
|
|
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
🖥️ 运行环境
以 MATLAB 基础环境为核心,便于教学与工程复现。
-
语言:MATLAB -
依赖:基础函数,无额外工具箱 -
硬件:普通 PC 即可
📁 项目结构
CFAR/ ├── detectors/ # 检测器实现 │ ├── cfar_detect_ca.m # CA-CFAR │ ├── cfar_detect_os.m # OS-CFAR │ └── cfar_detect_icos.m # 迭代 OS-CFAR ├── evaluation/ # 评估脚本 │ ├── eval_multitarget_pd_pfa.m │ └── eval_performance_vs_snr.m └── docs/ # 文档体系 ├── 算法文档.md # 理论与公式 └── 代码文档.md # 接口与结构📄 文档体系
文档覆盖算法原理与代码结构两个维度。
📘 算法文档
系统阐述 CFAR 公式、门限推导与算法谱系。
📒 代码文档
聚焦模块划分、接口规范与脚本流程。
💻 核心代码展示
🔥 门限系数求解
门限求解统一由解析式与二分搜索支撑。
function result = binary_search(scope, precision, func, varargin) target_pfa = varargin{end}; func_args = varargin(1:end-1); while true result = mean(scope); pfa_calc = func(result, func_args{:}); difference = 1 / pfa_calc - 1 / target_pfa; if abs(difference) < precision || abs(scope(1) - scope(2)) < 0.001 return; elseif difference < 0 scope(1) = result; else scope(2) = result; end end end🌟 滑窗检测流程
滑窗检测统一处理左边界、中间、右边界。
function result = cfar_detect_ca(x, alpha, n_slide, n_guard) half_slide = n_slide / 2; half_guard = n_guard / 2; len = length(x); left_bound = 1 + half_guard + half_slide; right_bound = len - half_guard - half_slide; threshold = zeros(1, len); targets = []; for i = 1:(left_bound - 1) cell_right = x(i + half_guard + 1 : i + half_slide * 2 + half_guard); threshold(i) = mean(cell_right) * alpha; if threshold(i) < x(i) targets = [targets, i]; end end for i = left_bound:right_bound cell_left = x(i - half_slide - half_guard : i - half_guard - 1); cell_right = x(i + half_guard + 1 : i + half_guard + half_slide); threshold(i) = (mean(cell_left) + mean(cell_right)) / 2 * alpha; if threshold(i) < x(i) targets = [targets, i]; end end for i = (right_bound + 1):len cell_left = x(i - half_guard - half_slide * 2 : i - half_guard - 1); threshold(i) = mean(cell_left) * alpha; if threshold(i) < x(i) targets = [targets, i]; end end result.name = 'CFAR_CA'; result.threshold = threshold; result.targets = targets; end🚀 鲁棒检测流程
引入序统计或截断策略抑制强干扰。
function result = cfar_detect_icos(x, Pfa, n_slide, n_guard, rate) half_slide = n_slide / 2; half_guard = n_guard / 2; len = length(x); max_iter = 30; left_bound = 1 + half_guard + half_slide; right_bound = len - half_guard - half_slide; threshold = zeros(1, len); targets = []; for i = 1:(left_bound - 1) ref_cells = x(i + half_guard + 1 : i + half_slide * 2 + half_guard); alpha = calc_threshold_os(Pfa, length(ref_cells), rate); for iter = 1:max_iter ref_sorted = sort(ref_cells); k = ceil(rate * length(ref_cells)); t = ref_sorted(k) * alpha; ref_cells = ref_cells(ref_cells <= t); new_alpha = calc_threshold_os(Pfa, length(ref_cells), rate); if new_alpha == alpha break; end alpha = new_alpha; end ref_sorted = sort(ref_cells); k = ceil(rate * length(ref_cells)); threshold(i) = ref_sorted(k) * alpha; if threshold(i) < x(i) targets = [targets, i]; end end for i = left_bound:right_bound cell_left = x(i - half_slide - half_guard : i - half_guard - 1); cell_right = x(i + half_guard + 1 : i + half_guard + half_slide); ref_cells = [cell_left, cell_right]; alpha = calc_threshold_os(Pfa, length(ref_cells), rate); for iter = 1:max_iter ref_sorted = sort(ref_cells); k = ceil(rate * length(ref_cells)); t = ref_sorted(k) * alpha; ref_cells = ref_cells(ref_cells <= t); new_alpha = calc_threshold_os(Pfa, length(ref_cells), rate); if new_alpha == alpha break; end alpha = new_alpha; end ref_sorted = sort(ref_cells); k = ceil(rate * length(ref_cells)); threshold(i) = ref_sorted(k) * alpha; if threshold(i) < x(i) targets = [targets, i]; end end result.name = 'CFAR_ICOS'; result.threshold = threshold; result.targets = targets; end🎬 一键运行
# 打开 MATLAB 并进入工程目录 # 将 utils/pfa/threshold/detectors 加入路径 # 运行 evaluation 中的评估脚本结果预览
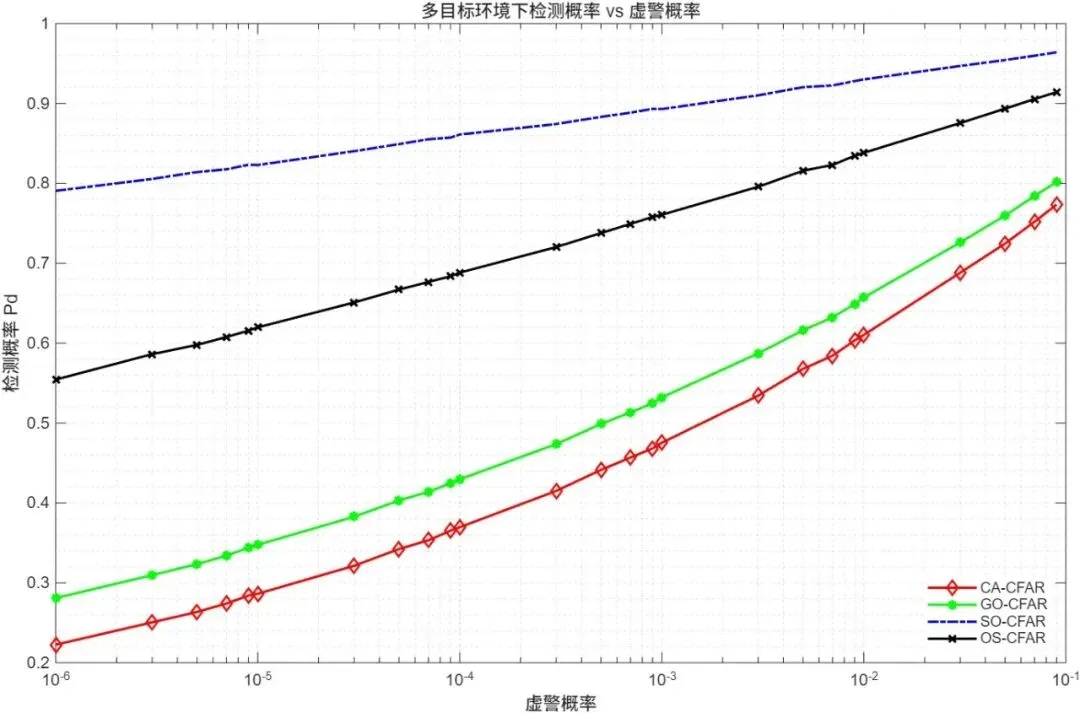
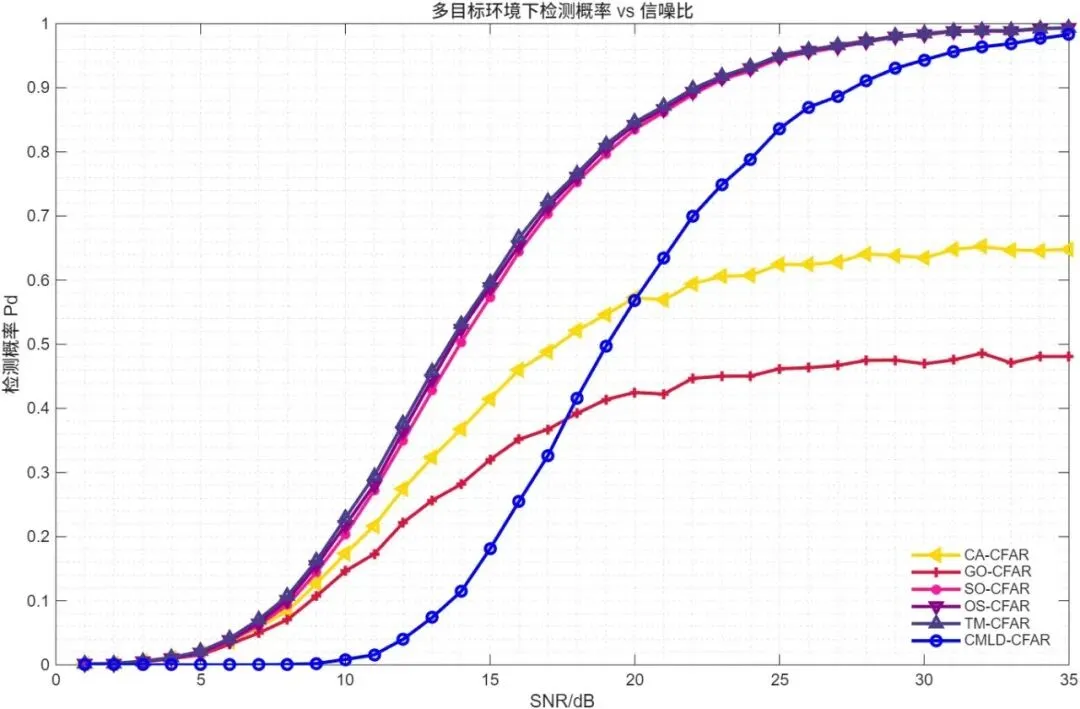
输出 Pd-Pfa 与 Pd-SNR 对比曲线。
多算法性能曲线对比图。
📸 演示图片预览
示意图用于展示关键性能曲线与检测效果。
-
Pd-Pfa 曲线对比 -
Pd-SNR 曲线对比 -
多目标检测示意 -
门限序列示意 -
杂波分布示意
🛒 获取方式
📚 参考文献
-
H. Rohling, “Radar CFAR Thresholding in Clutter and Multiple Target Situations,” IEEE Trans. AES, 1983. -
M. I. Skolnik, Radar Handbook, 3rd ed., McGraw-Hill, 2008. -
S. M. Kay, Fundamentals of Statistical Signal Processing: Detection Theory, Prentice Hall, 1998. -
J. I. Marcum, “A Statistical Theory of Target Detection,” RAND Research Memorandum, 1947. -
A. Farina, Radar Data Processing: Introduction and Tracking, Research Studies Press, 1985.