 夜雨聆风
夜雨聆风✅点击上方🔺公众号🔺关注我✅
OpenClaw 到底是在解放时间,还是侵占时间?答案不在工具本身,而在工作流设计。如果系统只是替你跑步骤,你仍然要不断补命令、纠方向、盯结果,这样做的后果是:你节省了操作时间,却增加了管理时间和注意力切换成本,最后反而让你越用越忙。只有当系统具备目标驱动、反馈迭代、待办状态和心跳巡检能力,才会真正帮你回收注意力。本文试着把这件事讲透。
AI 助手最危险的一种用法,不是不会做事,而是让你以为它在替你做事,实际上却把你拴在了流程中间。
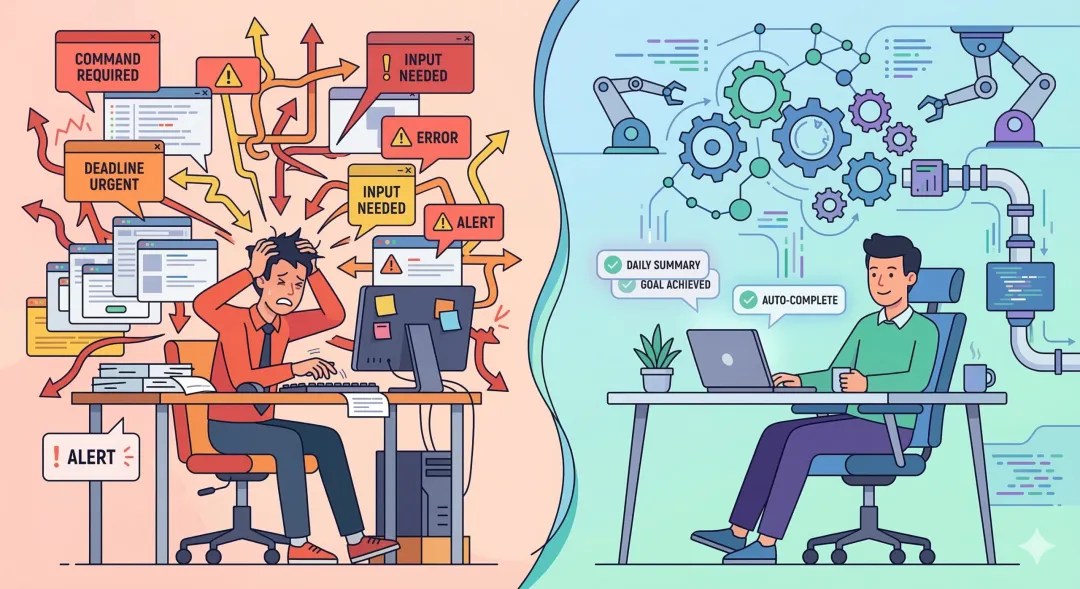
随着 OpenClaw 火爆之后,大家原以为可以通过自动化工作流彻底解放自己,自动发日报、自动抓网页、自动整理资料、自动写代码、自动发消息,看起来每一步都在节省时间。但很多人实际用下来,感受却并不轻松:命令倒是少敲了,结果却变成了另一种更隐蔽的忙碌——要不断补上下文、纠正方向、检查结果、盯流程有没有跑歪。一定也没有放松。
比如,有人用 OpenClaw 之前,每天晚上 10 点还在手动修改、调整、盯着流程有没有出问题,无法放心休息。用了 OpenClaw 之后,本以为能早点休息,结果发现自己还是要不断下命令、确认结果、纠正方向。到了晚上 12 点才能真正放心休息。这样看起来,自动化好像反而让人更忙了。
于是,一个更值得问的问题就出现了:
OpenClaw 这样的 AI 助手,到底是在解放我们的时间,还是在侵占我们的时间?
我现在的判断很明确:关键不在于它会不会执行命令,而在于你有没有把它设计成一个真正会朝目标持续推进的系统。
如果它只是一个"等你下一句命令"的聪明执行器,那它大概率会侵占你的注意力;如果它已经有了目标、记忆、待办、心跳和反馈闭环,那它才开始真正替你回收时间。
说到底,真正的自动化不是"把一串步骤跑快一点",而是"让系统自己接住流程"。
一、问题不在于"会不会自动跑",而在于"能不能自动闭环"
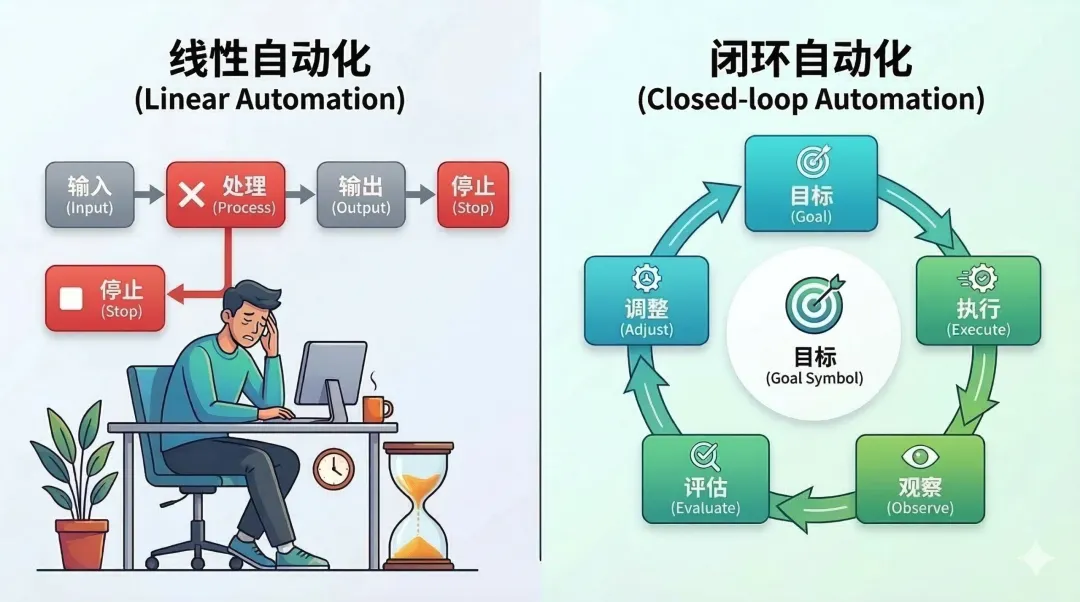
很多自动化流程,本质上都是线性的。
比如:抓资料,生成摘要,写成初稿,发给我。 或者:读取需求,写代码,跑测试,失败就发通知。
这类流程当然有价值,它们确实能减少很多重复劳动。但它们有一个明显的问题:一旦中途偏离目标,系统自己并不会修正,它只会停下来等人接手。
这时候,自动化并没有真正把人从流程里释放出来,只是把人的角色从"亲手执行"变成了"随时待命"。
所以,我越来越觉得,工作流不能只看"步骤有没有自动执行",而要看"目标有没有形成闭环"。
线性自动化的核心是:预设步骤,顺序执行。 闭环自动化的核心是:目标驱动,持续纠偏。
两者最大的区别不在于工具数量,而在于系统会不会不断问自己三件事:
我现在的目标是什么? 我离目标还有多远? 如果偏了,下一步该怎么修正?
这才是真正的分水岭。
如果一个系统只会执行步骤,那它最多只是一个脚本集合;只有当它开始具备观察状态、判断偏差、调整策略、再次执行的能力,它才开始像一个真正工作的系统。
所以,我更愿意用一句话来概括真正有价值的自动化:
目标驱动 + 反馈迭代 + 人只处理例外。
二、以程序开发为例,什么才叫真正的自动化工作流
这个差别,放在程序开发场景里特别清楚。
假设现在有一个需求:
给登录接口增加限流能力——15 分钟内连续失败 5 次则锁定 30 分钟;成功登录后自动清零;管理员账号不受影响。
如果是传统意义上的"自动化",流程通常会长这样:
读取需求 -> 写代码 -> 跑测试 -> 报错了通知开发者。
这当然能帮一点忙,但它并没有真正替人接住任务。因为只要测试失败、逻辑偏了、边界漏了,人就得重新回来分析、判断、再推一轮。
如果要把它设计成一个真正有操作性的自动化工作流,我认为至少要包含下面 6 步。
1. 先定义目标,不先定义动作
很多流程一开始就问:"第一步干什么?第二步干什么?"
但真正更有效的做法,是先定义完成条件。对于这个需求,"完成"不是代码提交了,而是同时满足这些标准:
功能符合需求; 相关测试通过;lint、typecheck 通过; 没有新增明显安全风险; 最终能形成可提交、可审查的 PR。
只有先把目标写清楚,后面的工作流才知道什么叫真的完成。
2. 自动读取上下文,而不是盲目开工
系统接到任务后,不能一上来就改代码,而要先理解项目环境。
它需要知道:
登录逻辑在哪里; 有没有现成的限流机制; 测试是怎么组织的; 项目用什么脚本跑 lint、test、build; 管理员账号的判断逻辑在哪一层。
这一步的本质,是先建立"状态感知"。不知道当前系统长什么样,后面的改动就只能靠猜。
3. 先形成最小可行方案,而不是一步到位
闭环工作流不是追求第一次就把所有边界条件做完,而是先形成一轮最小闭环。
比如第一轮只聚焦三个核心点:
失败次数累计; 成功登录后清零; 管理员绕过限流。
同时明确本轮会改哪些文件、补哪些测试、影响哪些模块。
这样做的目的,是尽快让流程进入"可验证状态",而不是把复杂度一股脑堆到第一轮里。
4. 执行时一定要同时制造反馈
这是最容易被忽略的一点。
自动化如果只会写代码,不会同时补测试、跑检查、制造反馈,它根本不知道自己写得对不对。
所以首轮执行之后,应该立刻跑最相关、最快速的验证:
目标模块单测; 局部 typecheck; 局部 lint; 必要时再进入更大范围的验证。
注意,关键不是"跑得多",而是"跑得能反馈出离目标还有多远"。
5. 根据反馈自动修正,而不是停在"通知失败"
如果测试失败了,工作流不能只干一件事——发一条通知说"失败了"。
那不叫自动化,那叫把错误甩回给人。
真正的闭环应该继续做两件事:
先判断失败属于哪一类; 再根据失败类型决定下一轮修正策略。
比如是类型定义问题、逻辑分支漏了、管理员账号被误伤了、还是清零逻辑没有生效,这些都不是同一种问题,对应的修正动作也不一样。
能不能根据反馈自动分流,决定了这个系统到底只是"自动执行器",还是一个真正会朝目标逼近的工作流。
6. 明确停止条件和人工例外出口
不是所有问题都应该无限自动迭代。
如果需求本身有歧义,涉及产品判断; 如果多轮修正后依然不收敛; 如果改动已经碰到安全边界、架构边界、兼容性边界;
那系统就应该及时停下来,把当前状态整理好,再把人叫回来。
而且叫回来的方式不能只是甩一堆日志,而应该明确告诉人:
已经做了什么; 卡在什么地方; 为什么自动修正没有继续收敛; 现在有哪些可选方案。
到这里你会发现,一个真正的自动化工作流,已经不再是"写代码 + 跑测试"这么简单了。它更像一个会持续观察、判断、修正的微型系统。
这也是为什么我说,真正节省时间的,不是"自动执行步骤",而是"自动完成闭环"。

三、为什么这件事更接近 PDCA / OODA
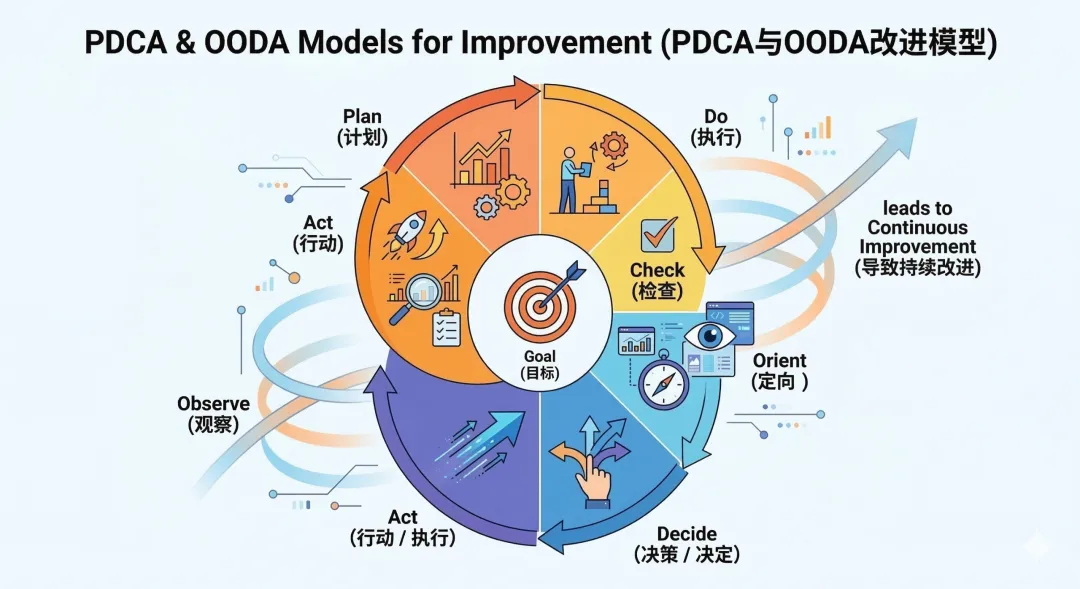
如果换一个更熟悉的说法,这种闭环工作流其实很接近 PDCA 和 OODA。
PDCA 是 Plan、Do、Check、Act。 OODA 是 Observe、Orient、Decide、Act。
很多人平时把这两个框架当成管理学概念,但如果把它们放到自动化系统里看,其实一点都不虚。
因为一个真正有效的工作流,本来就应该不断重复这四类动作:
先定义本轮目标; 再执行一轮尝试; 再检查结果和目标之间的差距; 最后根据差距修正下一轮动作。
这就是 PDCA。
同样地,当系统遇到异常时,它也必须先观察当前状态,再结合上下文理解局势,然后决定下一步怎么调整,最后把调整执行下去。
这就是 OODA。
所以,闭环自动化并不是给流程套一个高级概念,而是把"观察 - 判断 - 修正 - 再执行"真正做进系统里。
如果一个流程只是从头跑到尾,那它更像流水线; 如果一个流程能根据结果不断调整自己,那它才真正开始有"工作能力"。
四、怎样从"需要人一直下命令"走到"让 OpenClaw 真正全自动工作"
讲到这里,问题就不再是"OpenClaw 能不能做事",而是"怎样让它自己持续推进一件事"。
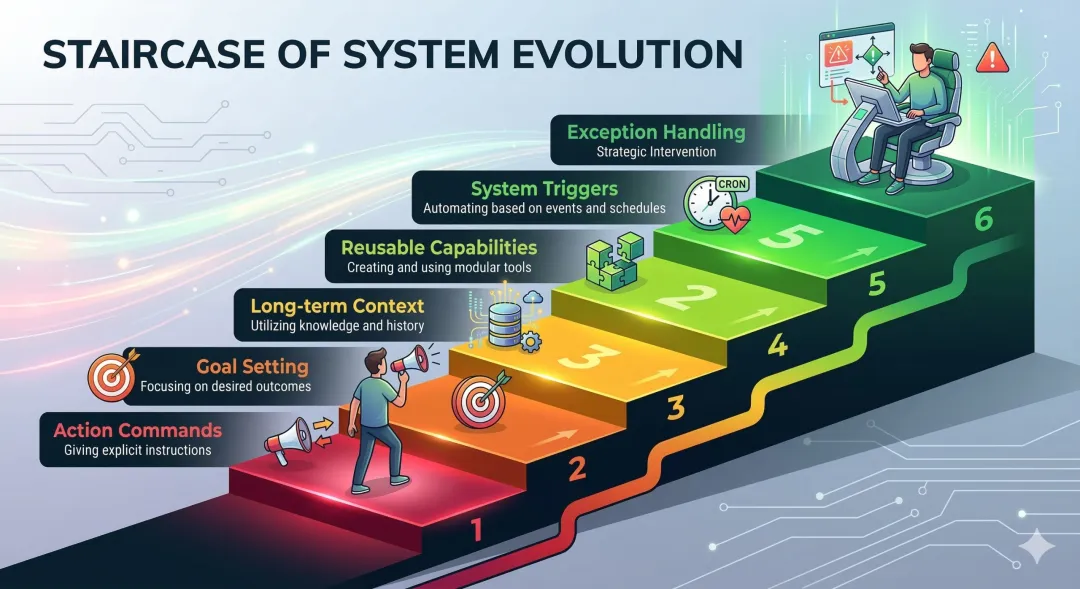
我觉得至少要完成 6 个转变。
第一,从"动作指令"变成"目标指令"
如果你每次都在说:去搜一下、再总结一下、再改一版、再发给我,那么 OpenClaw 再聪明,也只是一个高级执行器。
真正更高阶的用法,是直接给目标:
每天上午 10 点前产出一份 AI 新闻日报; 每周自动整理一次项目待办; 把某个主题写成可发布的公众号文章; 把一个需求推进到可提交 PR 的状态。
当目标足够清楚,系统才有空间自己决定步骤、工具和节奏。
第二,从"短期对话"变成"长期上下文"
如果每次开始都要重新解释背景、偏好、规则和边界,那自动化根本谈不上成立。
所以稳定的信息必须被搬出聊天窗口,写进可持续读取的地方,比如:
用户是谁; 时区是什么; 什么信息不能暴露; 日报要包含哪些栏目; 文章风格偏什么; 哪些任务遇到什么情况要停止。
只有这些背景进入长期上下文,系统才能"下次继续",而不是"每次重来"。
第三,从"临场发挥"变成"可复用能力"
高频任务不能每次都靠 prompt 临时拼。
真正能自动化的部分,必须沉淀下来:
稳定动作变成脚本; 固定套路变成 skill; 常见问题写进解决方案文档; 经常出现的判断条件写进规则。
自动化最值钱的地方,不是一次做成,而是下次不用再从头摸索。
第四,从"人工触发"变成"系统触发"
很多人以为自己已经自动化了,实际上只是把"亲手做"换成了"亲手喊 AI 做"。
这仍然是人工触发。
真正的自动化,应该让系统自己在合适的时候启动:
固定时间任务交给 cron; 周期巡检交给 heartbeat; 某些事件由消息、表单、文件变化、Webhook 来触发。
只要"别忘了叫它开始工作"这件事还在你身上,自动化就没有真正完成。
第五,从"执行步骤"变成"闭环迭代"
系统不能只会把流程跑一遍,而要会根据结果继续推进下一轮。
写文章时,不只是"搜资料 -> 出提纲 -> 写初稿",而是还要继续判断:
论据够不够; 结构顺不顺; 有没有空洞段落; 是否还需要补案例或重写。
代码、日报、公众号发布,本质都一样。真正值钱的不是执行一次,而是能自己迭代到接近目标。
第六,从"全程参与"变成"只处理例外"
真正成熟的工作流,不是永远不找人,而是只在该找人的时候找人。
正常路径由系统自己完成; 只有遇到需求歧义、连续不收敛、风险边界、权限问题时,才把人叫回来。
人的角色不再是流程执行者,而是目标设定者、边界制定者和例外处理者。
五、在 OpenClaw 里,真正自动化要靠什么搭起来
如果把上面这些都落到 OpenClaw 里,我觉得一个真正自动化的工作系统,至少需要这几层一起配合。
第一层是 memory
它负责保存长期上下文,让系统知道自己在为谁工作、有哪些稳定规则、哪些偏好不能丢、哪些安全边界不能碰。
没有 memory,系统每次开工都像失忆。
第二层是 todo
它不是简单的待办清单,而是任务状态表。
一件事做到哪一步、下一步该做什么、现在是"进行中""等待中""阻塞中"还是"已完成",都应该明确写下来。
没有 todo,系统就很容易"做过了,但没做完";或者"上次做到一半,这次又从头来"。
第三层是 heartbeat
这是 OpenClaw 里特别有价值的一个机制。
它不是为了机械地回复一句 HEARTBEAT_OK,而是为了让系统周期性回来检查:
今天有没有快到期的事; 最近有没有做了一半停下来的任务;todo 里有没有等待状态、现在已经可以继续推进的事项; 有没有需要主动提醒人的例外情况。
你可以把它理解成一个巡检器。todo 负责保存状态,heartbeat 负责回来巡检和推进。
第四层是触发器
固定时间任务用 cron,低频巡检用 heartbeat,特定业务事件用消息、文件、Webhook 等触发。
没有触发器,再好的工作流也只是"等人手动点开始"。
第五层是执行层
也就是脚本、skills、browser、搜索、抓取、写文件、发消息这些具体能力。
它们是手脚,但不是大脑。 工具本身不能构成自动化,只有当它们被放进目标和反馈回路里,才开始变得真正有价值。
第六层是例外出口
当系统发现资料冲突、连续多轮不收敛、涉及价值判断、超出权限边界时,必须及时停下来,把状态清晰地交还给人,而不是硬着头皮继续跑。
所以,从架构上说,一个真正能长期运转的 OpenClaw 工作流,应该更接近下面这个公式:
目标 + memory + todo + heartbeat + 触发器 + 执行能力 + 反馈判断 + 例外出口。
少一项,流程都可能变成半自动。 而一旦这几项都接起来,OpenClaw 才开始像一个真正"会持续工作"的系统,而不是一个等命令的工具。

六、OpenClaw 到底是在解放时间,还是侵占时间
说到底,这个问题不能简单回答"是"或者"不是"。
更准确的说法是:
OpenClaw 既可能解放时间,也可能侵占时间,关键取决于你有没有把它设计成系统。
如果你只是把它当成聊天助手来用,它很容易侵占你的时间。因为你虽然不再亲手做每一步,但你仍然要不断下命令、补上下文、纠方向、确认结果。你节省的是动作时间,却增加了管理时间和注意力切换成本。
这类系统表面上在帮你,实际上是在持续向你索取注意力。
但如果你把它设计成一个有目标、有记忆、有 todo、有 heartbeat、有触发器、有反馈回路的工作系统,情况就完全不一样了。
这时候,OpenClaw 节省的就不只是"执行动作"的时间,而是把原本属于人的持续关注、频繁切换和反复判断,逐步转移给系统。
真正被释放出来的,不只是几分钟操作时间,而是最贵的那部分资源:注意力。
所以我现在的观点很明确:
OpenClaw 不会天然帮你省时间。 真正帮你省时间的,是你有没有把它从"命令响应模式"推进到"目标闭环模式"。
前者会让你越用越忙; 后者才会让你越用越轻。
七、判断一个自动化系统是否真的在帮你节省注意力,有哪些标准
最后,我觉得判断一个自动化系统有没有价值,不该只看它做了多少事,而要看它拿走了多少原本属于人的注意力负担。
至少可以看 5 个标准。
第一,你离开之后,它还能不能继续推进
如果你一离开,流程就停; 你不发下一条命令,它就不知道接下来干什么; 你不回来确认,它就不敢继续。
那它本质上还是一个半手动系统。
第二,你介入的频率是在下降,还是在上升
如果同类任务做了很多次,每次都还要重新解释、重新催促、重新判断,那说明系统没有沉淀能力,只是在重复消耗你。
真正有价值的自动化,应该让你对同类任务的介入越来越少。
第三,它接过去的是"执行",还是连一部分"判断"也接过去了
低水平自动化只能替你跑步骤。 高水平自动化会替你处理一部分状态判断,比如:
现在是在待补资料,还是待校验; 应该补内容,还是重排结构; 该继续自动推进,还是进入人工例外。
如果系统只接动作,不接判断,那它节省的只是体力,不是脑力。
第四,它是在减少打断,还是在制造新的噪音
很多自动化系统的问题,不是做得不多,而是太爱打扰人。 什么都提醒,什么都通知,什么都要确认。
最后结果不是你更轻松了,而是你多了一个必须持续盯着的消息源。
真正成熟的系统,应该只在关键决策、异常阻塞、风险越界时才把人叫回来。
第五,它有没有长期复利
一次性替你完成一个任务,不叫真正的自动化。 把今天的经验沉淀成明天可复用的能力,才叫真正的自动化。
如果每跑完一次流程,系统的 memory 更完整、todo 更清晰、heartbeat 更聪明、脚本和规则更稳定,那么下一次同类任务的介入成本就会继续下降。
这才是自动化最值钱的地方:它不是一次性节省,而是长期复利。

结语
所以,回到最开始那个问题:OpenClaw 到底是在解放时间,还是侵占时间?
我的答案是:
如果你只是让它替你跑几步,它很可能侵占你的时间; 如果你把它设计成一个会记住状态、会主动回来、会根据反馈纠偏、只在例外时找人的系统,它就会开始真正解放你的时间。
自动化真正解放的,从来不只是操作本身,而是人对流程的持续关注。
能自动跑,不等于能自动工作; 能自动工作,不等于能节省注意力; 只有那些能自己记住、自己回来、自己修正的系统,才开始真正把时间一点点还给人。
而这,才是 OpenClaw 最值得投入的地方。
OpenClaw 真正要解放的,不是你的手,而是你的注意力。当系统开始记住状态、主动回来、根据反馈纠偏,只在例外时找你,它才开始把时间一点点还给你。
附录:实操指南 - Agent 配置示例
核心原则
本示例基于文章中的核心思想:目标驱动 + 反馈迭代 + 人只处理例外
通过 PDCA 循环(Plan → Do → Check → Act)和 OODA 循环(Observe → Orient → Decide → Act)来实现真正的闭环自动化。
项目概述
这是一个完整的 OpenClaw 自动化工作流示例。以"AI 新闻日报"为例,说明如何构建一个真正的自动化系统。
第一层:目标定义(PDCA 中的 Plan)
主目标:每天上午 10 点前产出一份 AI 新闻日报,包含 10 个主要栏目,质量达到可直接发布的水平。
完成标准:
✅ 内容覆盖 10 个栏目 ✅ 每个栏目至少 3-5 条新闻 ✅ 新闻来自过去 24 小时内 ✅ 内容经过去重和质量筛选 ✅ 格式符合公众号发布标准
这对应文章中"先定义目标,不先定义动作"的原则。
第二层:Memory 配置
长期上下文应包含:监控关键词、数据源优先级、质量标准、发布规则。
这对应文章中"从短期对话变成长期上下文"的原则。
第三层:Todo 管理
任务状态表应清晰记录:进行中、等待中、已完成、阻塞中的任务。
这对应文章中"执行步骤变成闭环迭代"的原则。
第四层:Heartbeat 设置
日常心跳检查应包括:检查今日任务、检查任务状态、主动提醒。
这对应文章中"从全程参与变成只处理例外"的原则。
第五层:Triggers 配置
自动触发机制应包括:Cron 定时任务、事件触发、用户手动命令。
这对应文章中"从人工触发变成系统触发"的原则。
第六层:执行能力
具体的脚本和 Skills:监控数据源、生成文章、浏览器自动化、发送消息。
这对应文章中"从临场发挥变成可复用能力"的原则。
第七层:反馈判断
自动评估机制:检查新闻数量、检查新闻时间、检查去重效果、自动重试或使用备用方案。
这对应文章中"执行时一定要同时制造反馈"和"根据反馈自动修正"的原则。
第八层:例外出口
何时停止自动化,叫人回来:
数据源完全不可用 内容质量严重下降 需求变化 系统限制
这对应文章中"明确停止条件和人工例外出口"的原则。
PDCA 循环在实际工作流中的体现
Plan(计划)→ 定义目标和完成标准 Do(执行)→ 启动任务,搜索、处理、生成、发送 Check(检查)→ 评估完整度和质量 Act(调整)→ 根据结果调整策略或触发人工介入 ↻ 循环回到 Plan,开始下一轮 完整工作流公式
目标 → Memory → Todo → Triggers → Execution → Feedback → Exception Exit → Heartbeat → ↻ 循环 关键要点
- 目标清晰
:不是"搜索新闻",而是"每天 10 点前产出可发布的日报" - 状态可见
:Todo 清楚地记录每一步的进度 - 自动纠偏
:反馈机制让系统自己调整策略 - 人只处理例外
:正常情况下系统完全自主,只有异常时才需要人 - 长期复利
:每次执行都更新 Memory,下次会更聪明 - 闭环迭代
:通过 PDCA 和 OODA 循环不断逼近目标
这就是真正的自动化系统。
附录:agents.md 模板 - 把工作流写进配置
什么是 agents.md
agents.md 是 OpenClaw 工作空间的"工作流宪法"。它不是代码,而是你对 AI 助手的持久化指示。
每次 AI 助手启动时,它都会读取 agents.md,了解:
你是谁(USER.md) 我是谁(SOUL.md) 我应该怎么工作(AGENTS.md) 我应该记住什么(MEMORY.md)
这就是文章中"长期上下文"的具体体现。
为什么 agents.md 很重要
- 持久化
:配置不会因为会话结束而丢失 - 一致性
:每个会话都遵循同样的工作流 - 可复用
:下次遇到同类任务,系统已经知道怎么做 - 可迭代
:每次执行都能改进配置,形成长期复利
可供参考的 agents.md 模板
前面讲了很多概念,但真正把 OpenClaw 用顺手,关键不是多装几个 Skill,而是把一套执行原则写进 AGENTS.md。这样,系统收到请求后就不会只会“执行一步停一步”,而是会先拆解目标、再按闭环推进,并把状态持续写进 todo。
下面这个版本,我刻意写得更像真实可用模板,而不是一份漂亮但空泛的清单。
# AGENTS.md - 闭环工作流模板## 核心原则**目标驱动 + 反馈迭代 + 人只处理例外**默认不要把用户请求只当成“一次性命令”,而要优先把它理解成一个目标:- 目标是什么- 约束是什么- 成功标准是什么- 哪些动作需要用户授权## 任务执行原则### 1. 先识别目标,再执行动作开始动手前,先识别:- 目标- 约束- 成功标准- 外部动作是否需要授权如果需求不清楚,只补问真正阻塞推进的最小问题。### 2. 先拆任务,再推进把请求拆成若干个可以独立推进、独立检查的小任务。优先选择这些任务:- 能单独完成- 能单独验证- 能单独更新状态- 中途卡住也不会让整个目标失控### 3. 用 todo 保存外部状态不要只靠会话记忆推进任务。推荐至少维护这些状态:- `todo`- `in_progress`- `blocked`- `done`- `next`每一轮推进后,都要更新:- 完成了什么- 卡在什么地方- 下一步最该做什么### 4. 默认按 PDCA / Ralph loop 跑 5 轮默认最多跑 **5 次循环**。每轮都按这个顺序:1. **Plan**:选当前最值得做的下一步2. **Do**:执行它3. **Check**:判断结果是否有效4. **Adjust**:更新计划、todo 和优先级这样做的目的不是“多循环”,而是:- 避免做一步就停- 避免无限空转- 控制 token 成本- 逼迫系统朝结果收敛### 5. 只在例外时回来找人默认应该继续推进,不要每一步都打断用户。只有在这些情况下才回来:- 目标不清楚- 外部动作需要授权- 风险明显升高- 结果置信度太低- 连续几轮没有有效进展- 出现多个差异很大的方案,需要用户拍板### 6. 优先收敛,不要无限探索如果 5 轮之后仍没有实质进展,应输出:- 已尝试什么- 学到了什么- 卡点是什么- 最好的下一步选项是什么## 长期上下文### 用户信息- 名字:[你的名字]- 时区:[你的时区]- 工作时间:[例如 09:00-21:00]- 工作风格:[例如 直接、利落、有点幽默]### 长期偏好- 内容风格:[你的风格]- 优先处理事项:[你的优先级]- 常用平台:[你的发布平台]- 偏好工具:[你喜欢的工具]### 安全边界- 不暴露:[敏感信息]- 不修改:[核心配置]- 不发送:[未经审核的内容]- 涉及风险时立即暂停并上报## 自动触发机制### Cron- [任务名]:[触发时间]- [任务名]:[触发时间]### Heartbeat频率:[例如 每 30 分钟]检查项:- 是否有未完成但值得继续推进的任务- `todo` 中是否有从 blocked 变成可继续的事项- 是否有需要提醒但还没提醒的事件- 是否有值得主动汇报的新进展## 反馈判断机制### 完整度检查- 是否覆盖目标要求- 是否达到最低完成标准- 是否存在明显遗漏### 质量检查- 信息是否准确- 结果是否可直接使用- 是否需要自动补充或重试### 何时停止自动化- 需求有歧义,涉及价值判断- 多轮修正后依然不收敛- 改动碰到安全边界或架构边界- 需要人工审核或最终确认此时应该:- 整理当前状态- 说明卡点- 给出可选方案- 等待人工决策## 长期复利每次执行完成后:- 更新 `MEMORY.md` 中的经验和教训- 更新 `todo` 的状态和后续动作- 优化 `scripts/` 中的脚本和工具- 改进 `HEARTBEAT.md` 中的检查项目标不是“让系统多做一步”,而是让系统越来越少占用人的注意力。
这份模板真正解决了什么
它解决的不是“怎么写 prompt 更厉害”,而是怎么让 OpenClaw 收到请求后,默认按闭环去推进任务。
换句话说,真正好用的 OpenClaw,不是等你一句句下命令,而是:
先拆目标 再拆任务 按 PDCA / Ralph loop 默认跑 5 轮 每轮更新 todo只在例外和低置信度时再回来找人
这才是文章里“解放时间”真正落地的地方。
如何使用这个模板
复制到自己的 ~/.openclaw/workspace/AGENTS.md用自己的目标、时区、工作时间、触发机制替换占位符 把真正长期重复发生的工作写进去,而不是把所有任务都塞进去 每次执行后,继续更新 todo、MEMORY.md和触发机制
这个模板的价值
它把 OpenClaw 从“聪明执行器”变成“会持续推进任务的系统” 它把自动化从“跑步骤”升级成“按反馈收敛” 它把人的角色从“流程操作者”变成“目标设定者和例外处理者”
这才是把文章里的闭环自动化真正落地的方式。
#OpenClaw #自动化工作流 #不间断工作流 #数字员工 #一人公司 #AI自动化 #小龙虾 #养龙虾 #AIAgent #clawdbot #moltbot
如果觉得这篇文章有帮助,欢迎点赞、在看、转发!有问题也可以在评论区留言,我会尽量回复!
