 夜雨聆风
夜雨聆风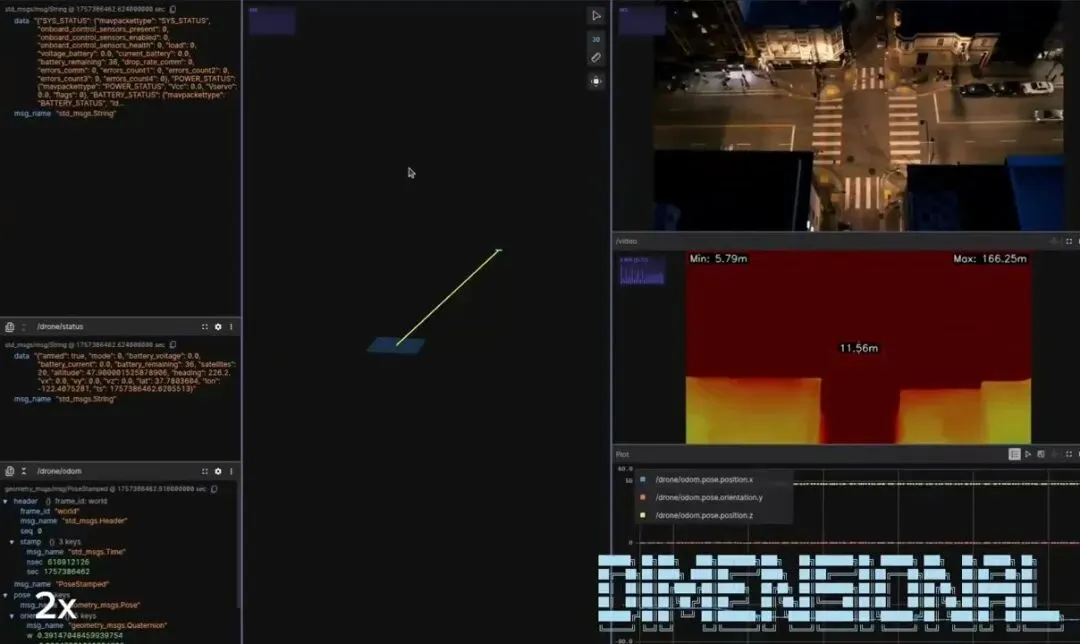
机器人操作系统
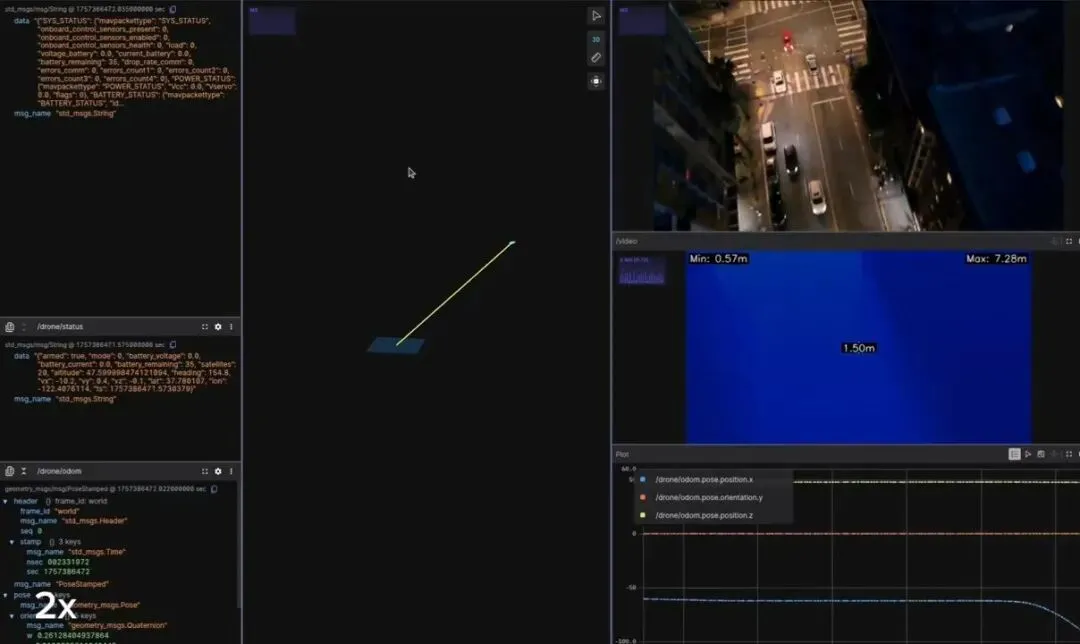
该功能通过社交媒体发布,声明“OpenClaw/Agent”现已能在其平台上操作无人机。一个典型的示例指令是:“跟踪下一辆穿过十字路口的白色汽车。” 系统会将此类指令转化为无人机的具体动作。
该平台基于 Dimensional 公司开发的开源软件环境 DimOS。开发人员表示,该系统的功能类似于物理机器的操作系统,就像传统操作系统在计算机上运行软件一样。
DimOS将成为机器人技术的通用软件层,支持包括人形机器人、机械臂、四足机器人和无人机在内的多种硬件。该软件可以处理来自摄像头和激光雷达(Lidar)等设备的传感器数据,执行导航并规划自主行为。
一个核心优势是:开发人员可以完全使用 Python 构建应用程序,而无需依赖虽然功能强大但极其复杂的机器人操作系统(ROS)。
AI 代理作为控制层
系统的核心在于 AI 代理的集成,它们直接与硬件通信。这些代理能够解析传感器数据、做出决策并通过标准接口执行操作。系统中使用了专门的模块来分析摄像机画面或执行导航任务。
开发人员通过命令行界面(CLI)向代理发送指令,随后代理会执行必要的操作。用户不再需要编写传统的程序代码,而是可以使用自然语言来描述机器人行为。
视频:
通过 MAVLink 进行无人机控制
通过最近的更新,该系统现在可以利用 MAVLink 协议控制无人机。MAVLink 是无人机行业广泛使用的开源通信协议,也是 PX4 和 ArduPilot 等自动驾驶系统的基础。
通过这种集成,AI 代理可以接收无人机的遥测数据,并同步发送飞行指令。开发人员称,这使得无人机能够成为大型多代理系统(Multi-agent systems)的一部分,实现不同机器人与传感器之间的协同工作。
迈向“可编程物理空间”
Dimensional 的创始人表示,他们的平台是迈向“可编程物理空间(Programmable Physical Space)”的一步。其愿景是让物理环境像软件一样可编程,由 AI 代理实时调度机器人、传感器和车辆执行任务。
对于无人机应用而言,这意味着 AI 系统可以自主执行巡检、目标跟踪或协调物流任务。目前该技术仍处于早期阶段,DimOS 的当前版本被开发商定义为预发布测试版(Pre-release Beta)。
