 夜雨聆风
夜雨聆风
PSIM具备PMSM电机参数识别功能,为TI DRV8305 EVM,DRV8312 EVM和高压硬件套件提供了一组代码。通过非常小的改动,用户就可以将该代码应用到电机控制器硬件中。凭借这一功能,PSIM为用户提供了一种最简便的方法,首先确定电机参数,然后使用InstaSPIN评估无传感器电机控制算法的性能。
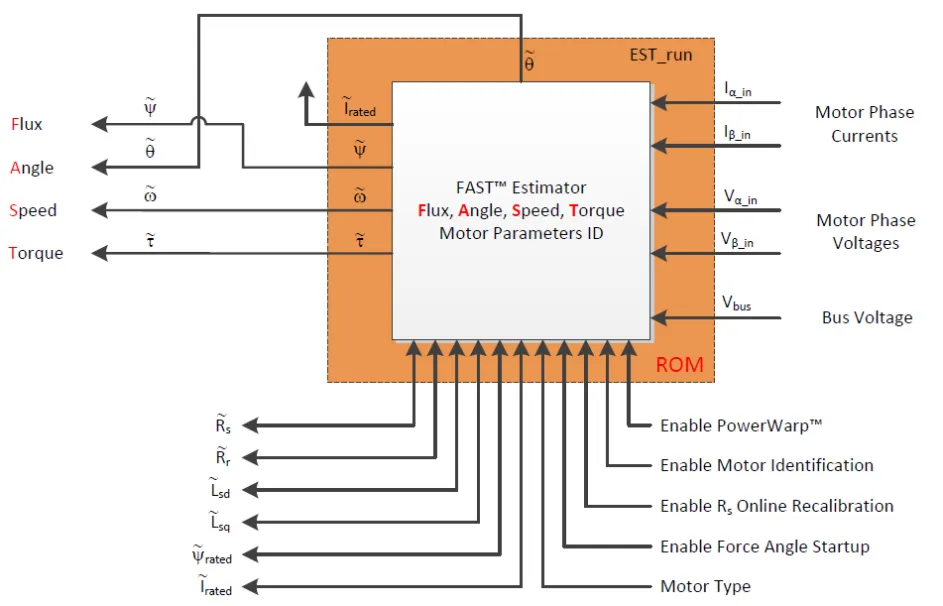
InstaSPIN算法的核心是一个FAST估计器,用于执行参数识别,并根据电机相电压和电流以及dc bus电压计算通量、角度、速度和扭矩。FAST模块如下所示。
电机参数识别是InstaSPIN的一个特性,它允许识别无传感器控制所需的参数。这一特性使得用户即使在电机参数未知的情况下,也能将电机运行至最佳性能。InstaSPIN电机参数识别的另一大好处是,提供了内部电流回路和外部速度回路PI控制器的设计,通过这些控制参数,电机驱动系统即可投入使用。
PSIM提供的代码主要基于TI的Motorware InstaSPIN Lab2a。不同之处在于,在PSIM的代码中,用于电机识别和InstaSPIN的参数方便地归类在一个参数文件中,该参数文件可以轻松创建和更新。
PSIM的InstaSPIN参数编辑器(在“Utilities”菜单下)。这使得采用不同的工作条件或功率转换硬件的代码变得更加容易。
在针对不同硬件使用代码时,应当从DSP外设的角度将控制硬件与示例代码中的控制硬件进行比较(如ADC和PWM通道)。如果DSP外设以相同方式使用,则无需更改代码,只需更新参数文件。如果DSP外设配置不同,则需要更改代码以匹配控制硬件。
请注意,目前代码仅适用于外部PMSM(SPM)(其中Ld=Lq)。不适用于内置PMSM(IPM)(其中Ld和Lq不同)或任何其他类型的电机。
PSIM中提供了以下电机识别示例和代码:
“examples\Motor Identification\TI DRV8305”: 适用于TI DRV8305 EVM
“examples\Motor Identification\TI DRV8312”: 适用于TI DRV8312 EVM
“examples\Motor Identification\TI High-Voltage Kit”: 适用于高压套件
有关TI DRV8305、DRV8312和高电压老化套件的更多信息,请参阅相关TI文件。
本教程介绍了如何使用PSIM的InstaSPIN参数编辑器和电机参数识别代码及实例,以获取DRV8305EVM硬件的电机参数。其他硬件的步骤与此类似。在本教程中,DRV8305示例文件被复制到:
“C:\Newfolder\PSIMProject\InstaSPIN\Drv8305InstaSpinMotorID”。
1
电机参数识别步骤
使用PSIM软件和电机驱动硬件识别电机参数有四个步骤。
步骤一:收集电机控制器的硬件信息
电流传感器增益
电压传感器增益
电压传感器滤波器截止频率
ADC配置
PWM配置
步骤二:将电流和电压传感器信息输入到PSIM的InstaSPIN参数编辑器中,生成用于电机识别的参数文件“InstaSPIN params_MotorID.h”。请注意,该文件名是硬编码的,不能更改。
步骤三:从TI CCS中,加载并运行示例文件夹中的电机识别代码。
步骤四:确定电机参数后,将以下参数记录到文本文件“Motor ID parameter.txt”中,以供后面使用。
电机参数:
gMotorVars. Flux_VpHz:电机额定磁通量
gMotorVars. Rs_Ohm:电机定子电阻
gMotorVars. Lsd_H:电机d轴电感
gMotorVars. Lsq_H:电机q轴电感
电压电流感应偏移:
gMotorVars.I_bias_value[0]:电流A感应偏移
gMotorVars.I_bias_value[1]:电流B感应偏移
gMotorVars.I_bias_value[2]:电流C感应偏移
gMotorVars.V_bias_value[0]:电压A感应偏移
gMotorVars.V_bias_value[1]:电压B感应偏移
gMotorVars.V_bias_value[2]:电压C感应偏移
PI控制器参数:
gMotorVars. Kp_Idq:电流回路比例增益
gMotorVars. Kp_spd:电流回路积分增益
2
参数编辑器
在使用电机进行识别时,基于控制器的工作条件以及电压和电流的感应方式,需要使用InstaSPIN定义和计算诸多参数。为了简化参数文件的准备过程,PSIM提供了InstaSPIN参数编辑器工具,以帮助用户快速生成所需的“InstaSPIN params_MotorID.h”文件。
要为电机参数识别生成InstaSPIN参数文件“InstaSPIN params_MotorID.h”,在PSIM中,执行Utilities>>InstaSPIN Parameter Editor。显示的对话框如下。有关如何使用参数编辑器的更多信息,请单击帮助按钮。
InstaSPIN 参数编辑器的输入可以保存为文本文件,以便以后使用。在“examples\SimCoder\F2806 x Target”文件夹中提供了以下硬件设置的示例文件:
InstaSpinMotorID_DRV8305,适用于 TI DRV8305 EVM
InstaSpinMotorID_DRV8312,适用于 TI DRV8312 EVM
InstaSpinMotorID_HVKit,适用于TI高压RPC和电机控制套件
要从之前保存的条目创建参数文件,单击“Load”按钮,将文件加载到InstaSPIN Parameter Editor中。然后,选中“Motor Identification”框,然后单击“Generate”按钮。
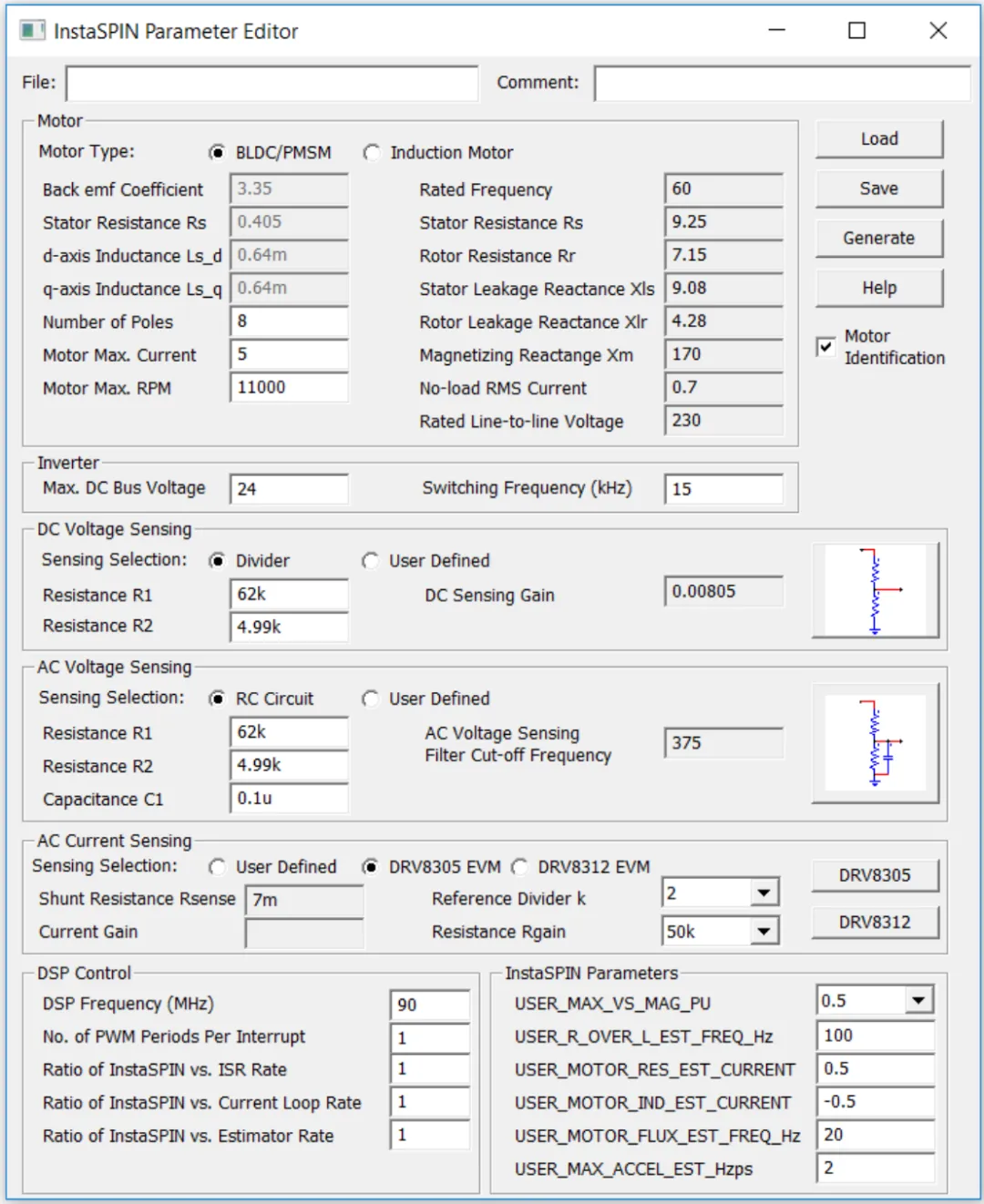
下面的对话框显示了基于TI DRV8305 EVM的电机参数识别入口。该对话框分为几个部分,下面分别对其进行说明。
1
电机部分
本节定义了电机类型和电机参数,支持两种类型的电机:BLDC/PMSM(包括IPM和SPM)和感应电机。对于电机的识别,仅BLDC/PMSM可被选择。对于DRV8305EVM的PMSM电机识别,定义了以下参数:
选择BLDC/PMSM
反电动势系数Ke:禁用(需要确认)
定子电阻Rs:已放电(需要识别)
d轴InductanceLs_d:禁用(需要识别)
q轴InductanceLs_q:禁用(需要识别)
极数:8
电机最大电流5A
电动机最大转速:11000 RPM
2
逆变器部分
本节定义了在运行和逆变器PWM开关频率期间可能出现的最大直流总线电压。对于DRV8305EVM,定义如下:
DC Bus电压:24 V
切换频率(kHz):15 kHz DC电压
3
直流电压感应部分
本节定义了如何检测dc bus电压。电压有两种方法:分压器和用户自定义。使用分压器时,需要设置分压电阻。使用用户自定义时,dc感应增益直接定义。对于DRV8305 EVM,它使用了电压分配器,基于DRV8305 EVM原理图,电阻为:
选择分压器
电阻R1: 62kΩ
电阻R2: 4.99kΩ
4
交流电压感应部分
本节定义了如何感应交流电压。感应电压有两种方式:RC电路或用户自定义。对于RC电路,需要指定电阻R1、R2以及电容C1。对于用户自定义,交流电压感应滤波器的截止频率直接定义。对于DRV8305 EVM,它使用RC电路,根据DRV8305 EVM电路图,这些值为:
选择RC电路盒
电阻R1: 62kΩ
电阻R2: 4.99kΩ
电容C1:0.1u F
5
交流电流感应部分
本节定义了如何感应交流电流。有三种选择:用户定义、DRV8305 EVM或DRV8312 EVM。对于用户定义,分流电阻和电流增益需要定义。请注意,当分流电阻为不为零,假设电流是通过分流电阻测量的,总增益等于分流电阻乘以输入的电流增益。如果分流电阻为零,则假设电流是通过霍尔效应传感器测量的,且总体收益与输入的当前收益相同。
对于DRV8305 EVM,它所使用的运放电路是固定的,但参考可以改变通过参考分频器k,增益可以通过电阻Rgain改变。两者都可以通过SPI命令设置。对于DRV8312 EVM,它所使用的运放电路是固定的,电流增益为19.1。实例中,使用DRV8305 EVM的默认设置,根据DRV8305 EVM原理图,这些值为:
选择DRV8305 EVM盒
参考分频器k:2
电阻R增益:50k Ohm
6
DSP控制部分
本节定义了与DSP和InstaSPIN设置相关的参数。DSP定义的参数如下:
DSP频率(MHz):90 MHz
每中断的PWM周期数:1
InstaSPIN与ISR比率:1
InstaSPIN与当前电流速率比值:1
InstaSPIN与估计率的比例:1
7
InstaSPIN参数
本节定义了可以直接设置的InstaSPIN参数。这些参数用于电机识别。在此示例中,参数定义为:
USER_MAX_VS_MAG_PU: 0.5
USER_R_OVER_L_EST_FREQ_Hz:300
USER_MOTOR_RES_EST_CURRENT:1.0
USER_MOTOR_IND_EST_CURRENT: -1.0
USER_MOTOR_FLUX_EST_FREQ_Hz:20
USER_MAX_ACCEL_EST_Hzps: 2
有关参数定义的详细信息,请在软件中参阅帮助页面。
一旦数据输入到各自的字段中,请点击Save按钮将数据保存到文本文件中,以便稍后使用。要为PSIM生成InstaSPIN参数件,请点击生成按钮,并将文件“InstaSPIN_params_MotorID.h”保存到与其他代码相同的位置,如下所示。
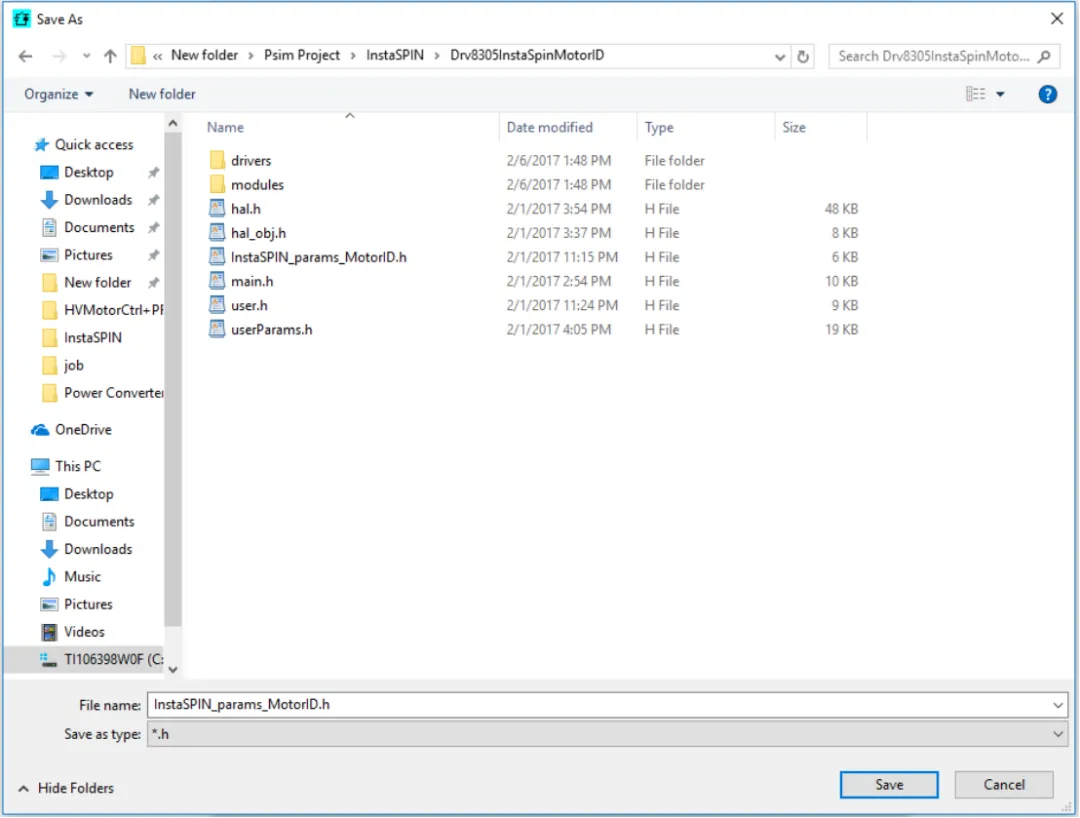
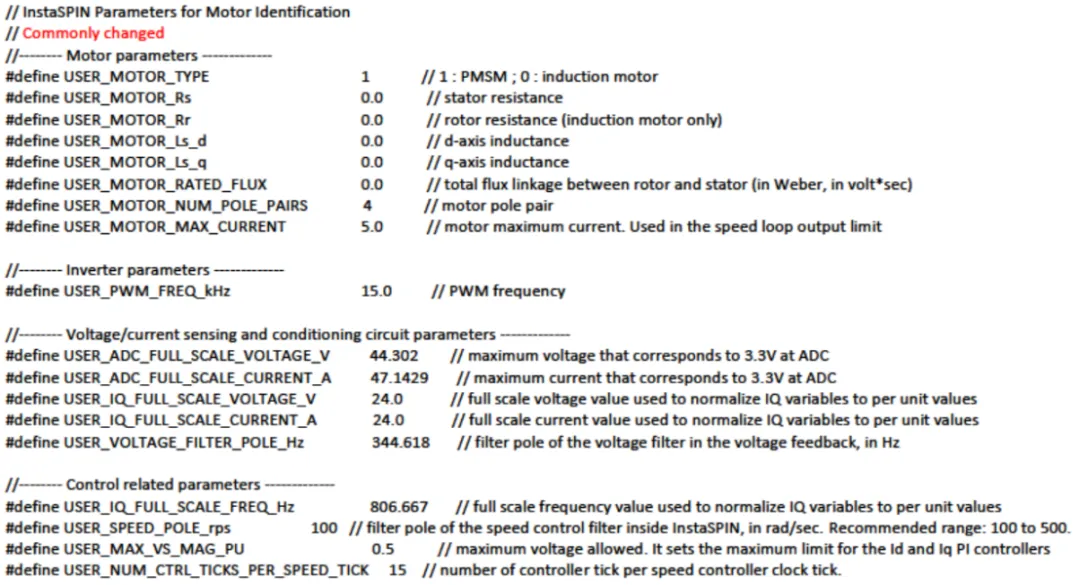
生成的InstaSPIN参数文件如下所示。为了便于检查,参数分为4个部分:常用更改参数、很少更改参数、常量、以及衍生参数。
经常更改参数:
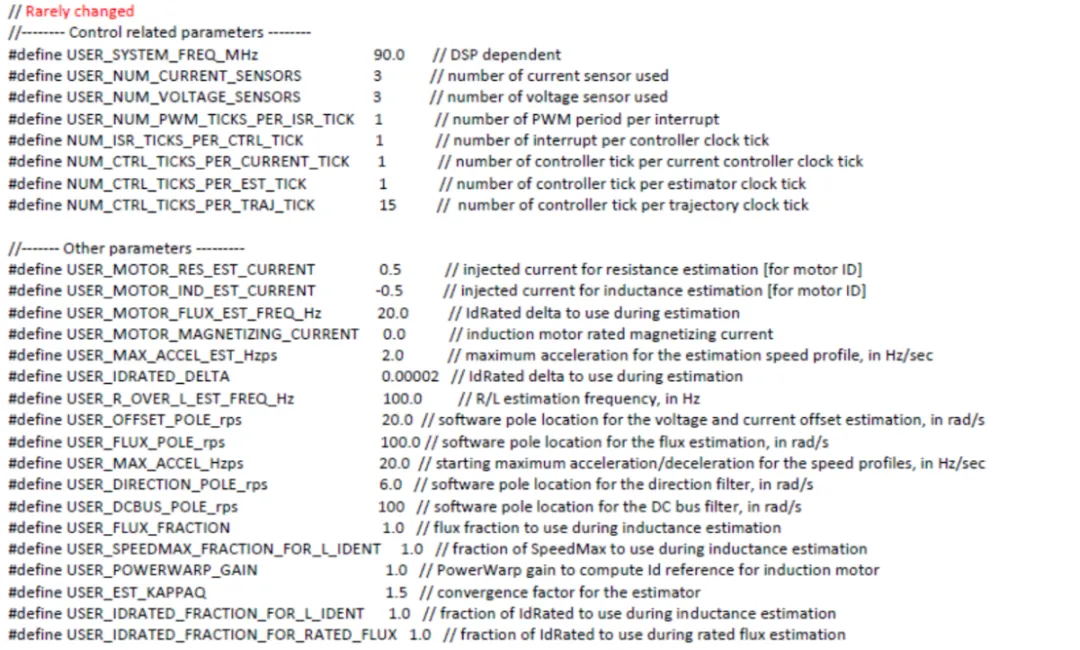
很少更改参数:
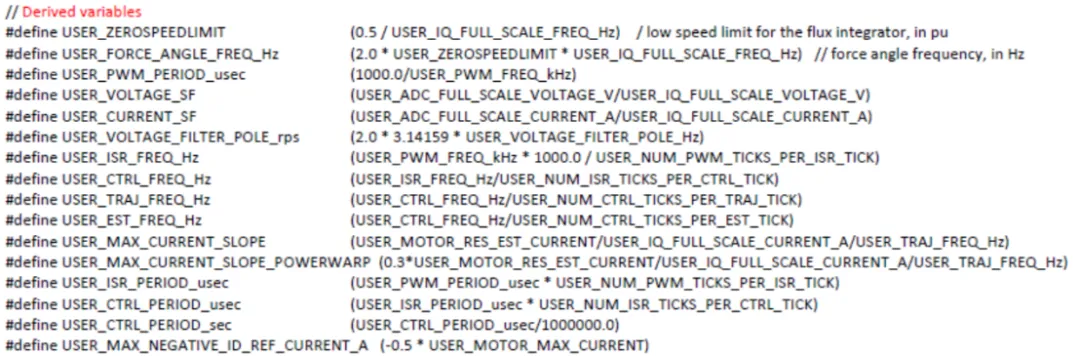
派生变量:
因为篇幅的限制,我们将在下一篇文章中继续讲述如何在TI CCS中运行电机识别码以及如何获取其他的参数,敬请期待。
如您需要本教程的PDF版本,请写邮件至infor@cnsim.cn获取!

