 夜雨聆风
夜雨聆风英文标题:Building trust beyond algorithm: How effort, service speed, and novelty increase trust in robot services
作者:Ye Eun Jeon, Hee Sun Park
期刊:Computers in Human Behavior, 2026, Vol. 176, 108871
📌 一句话摘要
机器人服务中,“努力”(human-like)与“速度”(machine-like)并非对立,而是可以共同增强信任。研究发现:消费者通过拟人化和AI整合感知机器人的努力,进而提升信任,并愿意支付更多。
🧠 研究背景:机器人上岗,信任怎么建?
随着劳动力短缺,越来越多的餐厅、咖啡馆、机场开始使用服务机器人。但问题来了:
机器人不像人类,消费者会信任它们吗?
我们到底是希望它快得像机器,还是暖得像人?
现有研究多关注机器人外表、动作等“表面拟人”,但忽略了更深层的问题:消费者如何感知机器人的“努力”? 以及努力与速度之间的矛盾如何被调和?
🎯 研究目的
本研究提出三个核心问题:
消费者如何感知机器人的“努力”?
努力与服务速度之间的“辩证张力”如何被消费者解决?
个体因素(如新奇感)是否也会影响信任?
📚 理论基础:关系辩证理论(RDT)
关系辩证理论指出:人际关系中存在对立需求(如亲密 vs 自主),人们会不断尝试平衡这些矛盾。
本研究将其扩展至人机关系,提出:
努力(human-like)与速度(machine-like)是新的辩证维度
消费者会寻求“中间地带”:既希望机器人有机器效率,也期望它有人性化的努力
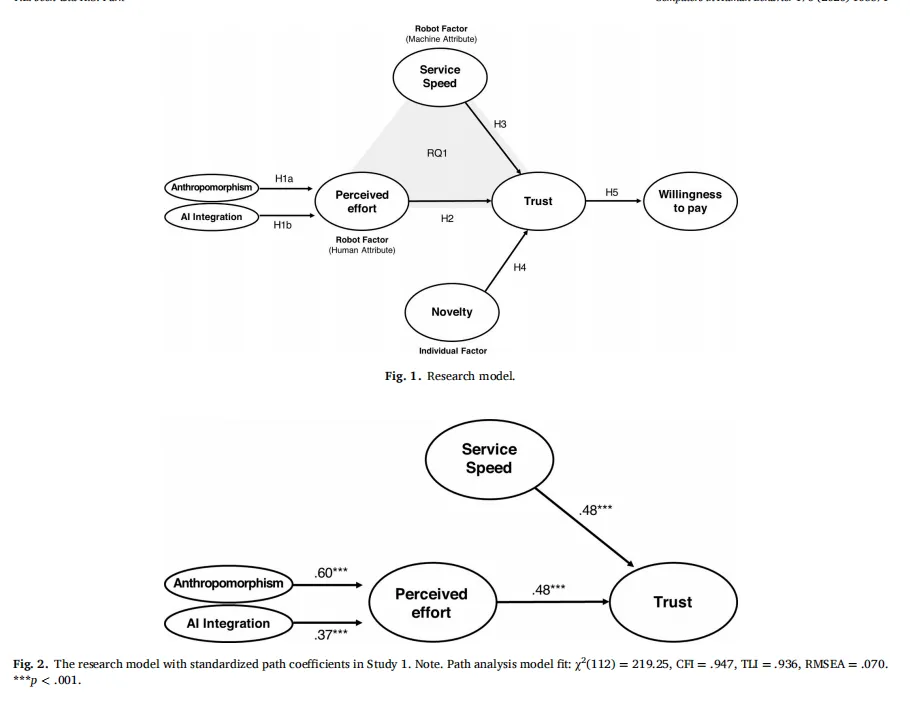
🧾 研究假设(H)
关于努力的前因
H1a:拟人化(Anthropomorphism)与感知努力呈正相关
H1b:AI整合(AI integration)与感知努力呈正相关
关于信任的直接影响
H2:感知努力与信任呈正相关
H3:服务速度与信任呈正相关
H4:新奇感(Novelty)与信任呈正相关
关于信任的结果
H5:信任与支付意愿(Willingness to Pay, WTP)呈正相关
💡 其中 H2 和 H3 是辩证张力检验的核心:努力(human-like)和速度(machine-like)是否都能显著影响信任?是否存在冲突或平衡?
🧪 实验设计概述
所有参与者观看机器人制作咖啡的视频后填写问卷。
📊 测量变量与量表来源
✅ 所有变量的Cronbach's α > 0.82,信度良好;
✅ 验证性因子分析(CFA)确认五因子结构优于其他模型,区分效度良好(HTMT < 0.85)。
📈 统计方法
验证性因子分析(CFA):检验量表结构效度
路径分析:使用AMOS软件检验假设模型
间接效应检验:Bootstrap方法(5000次重抽样)
模型拟合指标:χ²/df, CFI, TLI, RMSEA
🔍 主要结果
✅ 研究1(Doosan Robotics)
H1a:拟人化 → 努力,β = 0.60*** → 支持
H1b:AI整合 → 努力,β = 0.37*** → 支持
H2:努力 → 信任,β = 0.48*** → 支持
H3:速度 → 信任,β = 0.48*** → 支持
努力与速度对信任的影响无显著差异(Z = -0.311),说明两者同样重要。
✅ 研究2(XYZ 咖啡机器人)
H2:努力 → 信任,β = 0.45*** → 支持
H3:速度 → 信任,β = 0.28*** → 支持
H4:新奇感 → 信任,β = 0.23*** → 支持
H5:信任 → 支付意愿,β = 0.20*** → 支持
努力、速度、新奇感三者共同增强信任,进而提升支付意愿。
✅ 研究3(Planz 智能售货机)
H2:努力 → 信任,β = 0.53*** → 支持
H3:速度 → 信任,β = 0.24*** → 支持
H4:新奇感 → 信任,β = 0.22*** → 支持
H5:信任 → 支付意愿,β = 0.36*** → 支持
在此研究中,努力的影响显著大于速度(Z = 2.458),可能是因为售货机本身更具“机械感”,努力显得更突出。
💡 理论启示
努力是可以被“设计”出来的:通过拟人化动作和AI整合,机器人也能被感知为“努力”的服务者。
努力与速度并非对立:消费者会主动调和矛盾,寻求“既快又暖”的中间地带。
新奇感是信任的催化剂:新颖的机器人体验能激发正面情绪,增强信任。
🛠 实践建议(给企业和设计师)
🎯 设计“努力”信号:
即使是非人形机器人,也可以通过左右移动、上下摆动等动作传达情绪
使用动画加载界面(如“正在为您精心挑选咖啡豆…”)增强“劳动幻觉”
🤖 强调AI能力:
营销语示例:“我们的AI分析了数万条数据,为您定制专属风味”
⚖️ 平衡努力与速度:
在效率优先场景(如自助查询机):使用简短文字提示(如“正在搜索货架…”)
在体验优先场景(如酒店前台):使用多步骤反馈(如“正在查看您的偏好…”)
⚠️ 研究局限与未来方向
视频观看 vs 真实互动:未来可在真实服务场景中验证
文化差异:本研究在韩国进行,未来可跨文化比较
技术素养:高技术素养者可能更理性归因机器人行为
新奇感也可能带来风险感知,需研究其边界条件
📌 总结一句话
机器人服务的信任,不是“快”或“暖”的选择题,而是如何在两者之间找到平衡的艺术。
📚 参考文献(部分)
Bartneck et al., 2009, International Journal of Social Robotics
Buell & Norton, 2011, Management Science
Waytz et al., 2010, Psychological Review
Baxter, 1996, Relating: Dialogues and Dialects
英文文献阅读全流程:从文献如何“搜”到怎么“管”再到“读”的一站式攻略


END
点击关注,发送 "人机互动" 即可获取全文PDF
