 夜雨聆风
夜雨聆风

阅读提示:
本文约2777字,阅读时间约7~8分钟,建议收藏或划线标记,以便随时回顾。
本文选自:
Ocean Robotics Planet Magazine Issue
文章脑图:
名词解释:
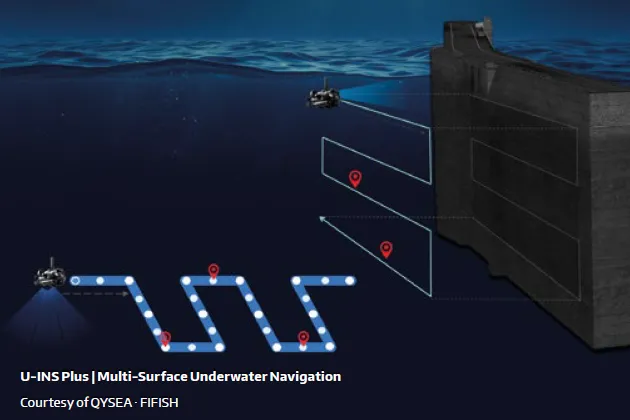
U-INS Plus:水下惯性导航系统,通过融合惯性传感器、GNSS参考数据与导航算法,提供高精度相对定位,支持预设路径自动执行与重复作业。
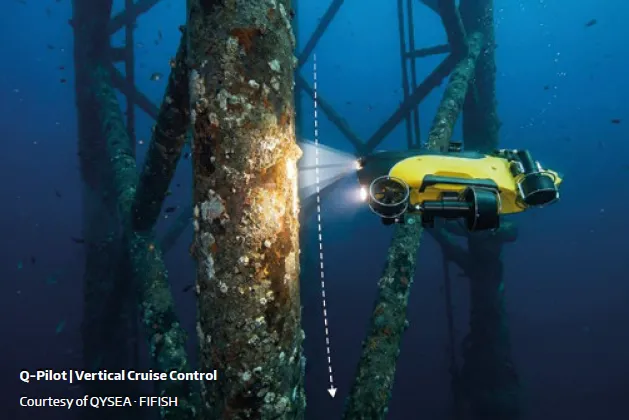
Q-Pilot:智能巡航控制系统,集成站位锁定算法与多传感器输入,实现水下微米级姿态控制、自动避障及半自主运动模式。
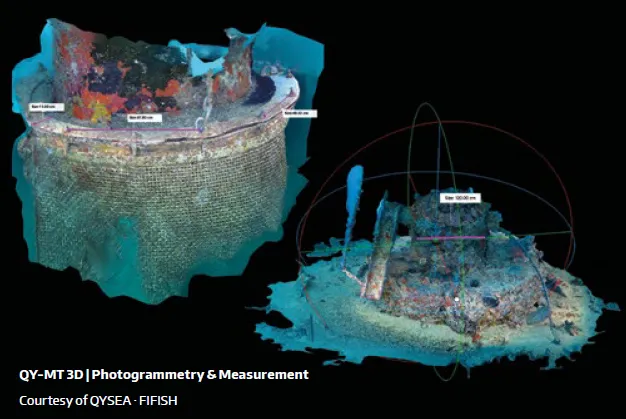
QY-MT 3D:三维测量工具,基于连续4K影像生成高精度三维重建模型,支持结构尺寸评估、变形分析及环境研究。
正文内容:
在海洋工程领域,传统观念往往将水下机器人的作业能力与物理参数(如体积、推力、负载)直接挂钩。然而,随着海洋作业复杂度的提升,单纯依靠机械冗余已无法满足现代工程对精度、效率与安全性的严苛要求。本文旨在解析一种基于“软件定义硬件”(Software-Defined Hardware)的技术架构,探讨如何通过多源传感器融合、闭环控制算法与机载计算的深度融合,构建新一代水下智能作业系统。
一、 核心架构:从机械堆叠到算法驱动
该技术体系的核心在于打破硬件与软件的边界,建立一套集成感知、计算与执行的统一平台。
物理层(执行与感知):
硬件基础: 依托高功率密度推进器与流体优化结构,提供基础动力学响应。
传感矩阵: 集成多轴惯性测量单元(IMU)、深度计、多普勒计程仪(DVL)及超短基线(USBL)定位系统,构建环境感知的物理基础。
算法层(决策与控制):
控制逻辑: 通过实时操作系统(RTOS)运行控制算法,持续处理环境数据流。
核心机制: 利用传感器融合技术(Sensor Fusion),将物理控制转化为算法控制。这使得系统无需增加机械复杂度,即可实现从“感知”到“受控运动”的转化,确保输出的可靠性。
二、 关键技术模块:构建端到端的工程闭环
该技术体系构建了完整的“观察-导航-测绘-交付”工程闭环,旨在解决水下作业中的流体干扰、定位丢失与数据孤岛三大痛点。
1. 动态环境下的运动控制(Observe)
技术难点:水流扰动导致的载体位姿漂移,以及近距离检测时的安全距离维持。
解决方案:
水下定点锁定(Station-Lock):结合锁定算法与多传感器输入,实时检测微小位移并自动修正位置、姿态与深度,实现抗流悬停。
智能巡航控制(Q-Pilot):引入半自主运动模式。系统自动维持安全距离与姿态,操作员仅需设定方向,实现垂直、水平或平行的连续移动。该技术显著降低了人为操作疲劳,确保了长周期检测路径的一致性。
2. 空间维度的精准定位(Navigate)
技术难点:水下GNSS信号失效导致的相对定位累积误差,以及重复作业的路径一致性问题。
解决方案:
U-INS Plus 惯性导航系统:融合惯性传感器与水面GNSS参考,通过机载导航逻辑,提供精确的水下相对定位,支持预定义路径的自动执行。
U-QPS 快速定位系统:基于USBL技术实现绝对定位。
长期监测能力:通过关键点标记与自动返航功能,解决了孤立检测数据无法形成趋势分析的问题,建立了长期监测的工程标准。
3. 视觉数据的量化重构(Measure & Map)
技术难点:原始视觉数据缺乏空间维度,无法支撑工程决策。
解决方案:
QY-MT 2D/3D 测量工具:基于激光标定与4K连续成像,利用计算机视觉算法生成结构化的三维模型。支持厘米级精度的尺寸测量、变形分析及体积计算,替代了传统的物理接触式测量。
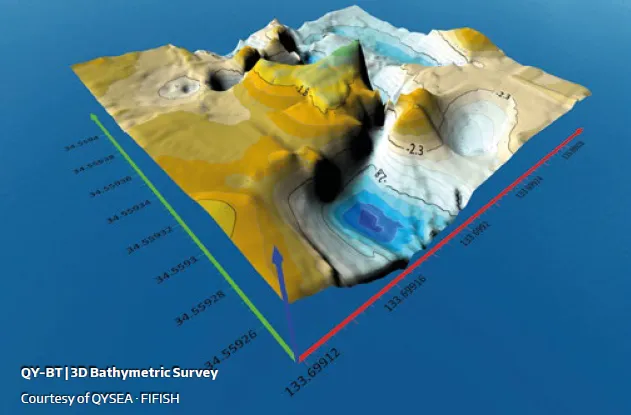
QY-BT 测深建图:结合深度传感与导航数据,生成2D剖面与3D海床地形图,无需额外搭载笨重的多波束声呐,即可完成风险评估与作业规划。
4. 交付(Deliver):数据驱动的决策支持
最终输出不仅包含高清影像,更整合为结构化报告、三维模型与动态海床图,为工程维护、环境监测或科研分析提供直接依据,避免数据“孤岛化”。
三、 工程价值:从数据采集到决策输出
该技术架构最终实现了从“数据捕获”到“可操作洞察(Actionable Insight)”的跨越。
标准化输出:生成的结构化文档、三维模型与动态海床图,直接转化为工程报告、维护方案或科研数据。
全流程闭环:从稳定的数据获取、可重复的导航,到精确的评估与长期监测,形成了完整的工程闭环。
行业赋能:该体系不仅提升了水下检测的精度与效率,更将水下作业的决策依据从主观经验转化为客观数据,广泛应用于海洋工程、环境保护及运营规划领域。
结语:
QYSEA的技术创新证明:未来水下作业的关键,不在于“造更大的机器人”,而在于 “用软件重新定义硬件的能力边界,用算法突破环境的物理限制” 。FIFISH AI ROV通过软硬协同的智能架构,正在将水下作业从依赖经验的“粗放式操作”,转变为数据驱动、精准可控的“智能化工程”。这一变革,不仅为海洋工程、能源、环保等领域提供了更高效、安全的工具,更为水下机器人行业树立了新的技术标杆。
关键问题与回答
FIFISH AI ROV如何实现复杂水流环境下的稳定作业?
通过Q-Pilot系统的多传感器融合技术,结合站位锁定算法与实时控制逻辑,检测并自动修正微米级位置偏差,同时利用自适应避障算法保持安全距离。
U-INS Plus与传统水下定位系统的区别是什么?
U-INS Plus融合惯性传感器、GNSS参考数据与USBL技术,提供绝对定位与相对定位双重能力,支持预设路径重复执行,而传统系统多依赖单一技术,定位精度与可靠性受限。
QY软件套件如何提升水下数据的决策价值?
通过集成激光测距、4K影像与深度感知技术,将原始视觉数据转化为厘米级三维模型、水深剖面图及结构尺寸记录,支持变形分析、环境监测与风险评估。



