 夜雨聆风
夜雨聆风 1
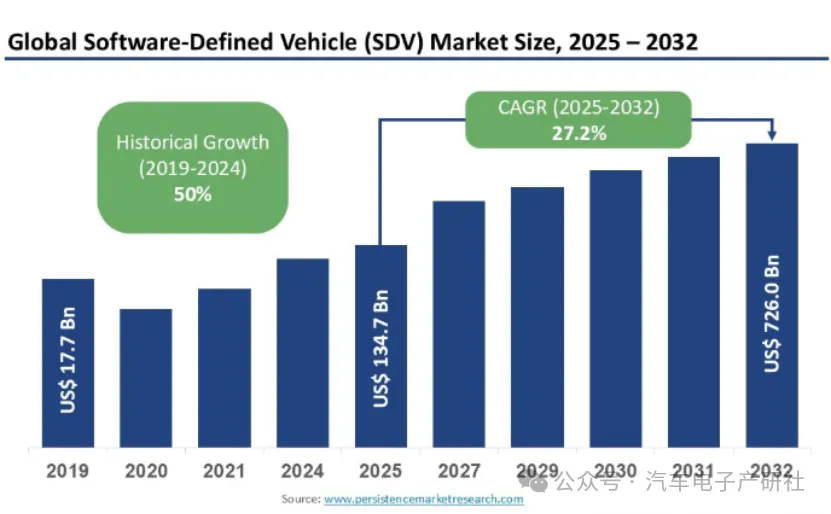
1【高科技太米TmSDV防起雾摄像头】TMS热管理与SDV(Software-Defined Vehicle,简称 SDV)的完美结合。您的选择,就是我们的责任(守护您一路平安)财富热线15017756788】【环境湿度与温差:在寒冷、高湿度环境(如雨天、雪天、清晨)或车辆从低温环境进入温暖环境时,摄像头镜头与外部保护罩之间易产生冷凝水,导致起雾。在设计摄像头系统时,分辨率、帧率、视场角(FOV)、动态范围和感光性能是最重要的五大指标。】全球软件定义汽车(SDV)市场规模预计在2025年达到1347亿美元,预计到2032年将达到7260亿美元,2025年至2032年预测期内复合年增长率为27.2%,这得益于汽车软件架构、电气化和自动驾驶技术的快速进步。
电动汽车的普及、更严格的排放和安全法规以及OTA更新的广泛整合,预计将推动软件定义汽车市场增长。OEM对区域架构和ADAS的投资,加上5G扩展、消费者对定制需求以及向自动驾驶的转变,使SDV成为未来出行的关键。
重点
领先的电子/电子架构:区域控制架构是增长最快的电子/电气架构细分领域,预计到2030年市场渗透率将超过35%,这得益于其模块化和可扩展性优势。
主导功能:ADAS在软件功能中占据主导地位,2025年市场份额约为36%,而自动驾驶软件则在2032年前迅速扩展。
主要推进类型: 电池电动车占2025年SDV车辆市场的45%以上,预计在2025年至2032年间实现最高的复合年增长率。
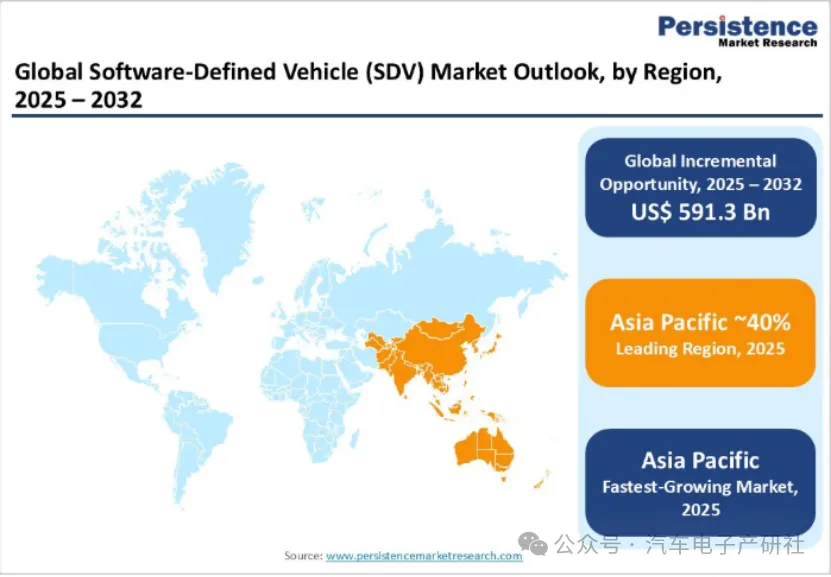
区域主导地位:亚太地区是最大且增长最快的区域市场,预计2025年将占据约40%的份额,这得益于中国的新能源汽车授权和制造实力。
区域动态:北美保持着强大的创新领导地位,预计2025年市场份额将达到32%,这得益于不断推进的排放法规和先进的汽车研发生态系统。
竞争环境:全球主机厂对汽车技术公司的大规模投资以及汽车巨头推出订阅模式,通过平台标准化和持续性收入流,正在重塑市场格局。
2025年11月:Rivian与大众集团技术成功推进了其价值60亿美元的合资企业,专注于区域计算架构和软件,并宣布计划到2030年将Rivian的先进软件栈部署在大众集团约30个车辆项目和3000万辆车辆上。
项目 | 详细情况 |
软件定义车辆(SDV)市场规模(2025E) | 1347亿美元 |
市场价值预测(2032年F) | 7260亿美元 |
预计增长(2025年复合年增长率至2032年) | 27.2% |
历史市场增长(2019年至2024年复合年增长率) | 50% |
市场因素——增长、障碍与机遇
监管推动零排放和自动驾驶汽车
全球各国政府正在发布严格的排放目标和自动驾驶车法规,推动了SDV的普及。
欧盟(EU)的绿色新政和美国环保署(EPA)的先进清洁汽车法规要求大幅减少乘用车排放,并激励电动汽车的普及,而电动汽车本质上依赖于复杂的SDV架构。中国新能源车配额制度严格执行电动汽车生产份额要求,促进SDV在全球最大汽车市场的增长。包括美国国家公路交通安全管理局(NHTSA)和联合国欧洲经济委员会(UNECE)全球技术法规在内的国家级安全标准,正在加速ADAS和自动驾驶软件的发展。
根据国际能源署(IEA)的数据,2024年全球电动汽车销量占全球汽车总销量的20%以上。这对于推进SDV集成至关重要,因为电动平台本质上支持软件。监管激励措施促进了SDV的快速普及,并凸显了公共政策对OEM投资可扩展软件平台的巨大经济动力。
半导体短缺下高开发与集成成本
软件定义汽车系统的复杂性要求在先进软件平台、域控制器、传感器和高性能计算单元上投入大量研发。尽管规模经济存在,半导体的稀缺性和不断上涨的成本,加上地缘政治紧张和供应链中断,成为阻碍SDV扩散的关键障碍。
元件短缺导致交货时间延长和生产成本上涨,推高集成电路(IC)价格上涨。架构的中心化和区域架构加剧了对专用芯片的需求,推动了OEM对内部软件开发和集成的资本支出。
软件验证和网络安全保障增加了开发复杂性和成本。许多针对SDV的监管框架处于新阶段,也带来了合规性不确定性,可能延迟产品发布。这种环境挑战了盈利空间,促使OEM与技术供应商之间通过创新的成本分摊或协作策略,以维持SDV市场的动能。
OTA软件变现和按需功能模式的扩展
软件定义汽车提供OTA软件更新的能力,为OEM开启了超越传统车辆销售的持续收入来源。按需功能(FoD)车型允许消费者在购买后激活新功能,如增强驾驶辅助、信息娱乐升级或自动驾驶功能。
新兴的5G/6G网络和边缘云计算增强了OTA能力,推动客户参与度,使OEM通过持续创新实现差异化。此外,商业车队运营商越来越依赖基于订阅的SDV服务进行车队优化、预测性维护和合规监控,代表了一个快速增长且利润率高的市场。
这一机遇需要在安全的更新基础设施、分析和平台开发上进行战略投资,强化软件定义汽车作为制造商和供应商变革性收入引擎的地位。
类别分析
电子/电气(E/E)架构洞察
中央集中架构细分市场目前占据主导地位,预计2025年占SDV市场收入份额的48%,这得益于其成熟的集成模型,将车辆功能细分为如ADAS、信息娱乐系统、动力系统和车身控制等领域。这种架构方法使模块化得以增强,域控制器协调特定子系统,简化复杂性,提升系统可靠性。
大众集团和宝马等领先OEM厂商广泛嵌入了该架构,促进了更快的功能推出周期以及硬件与软件层之间的更好集成。它还通过将系统漏洞进行分类,简化了对不断变化的安全与网络安全法规的合规。
区域控制架构很可能成为2032年前增长最快的电/电架构,这得益于其卓越的可扩展性和线路简化能力。与中央集中式模型不同,分区架构将车辆电子设备按物理分区划分,分别为前、后、左、右,并配备集中式高性能计算单元。
这不仅提升了计算效率和实时数据处理,这对4+级自动驾驶至关重要,同时也降低了布线复杂度,支持灵活的OTA软件管理。梅赛德斯-奔驰、斯泰兰蒂斯和大众集团的投资凸显了将分区架构战略优先考虑,作为未来可持续平台,能够加快创新进程并降低系统成本。
功能洞察
预计2025年,ADAS将在软件定义汽车市场占有36%的份额,这得益于车辆安全的监管要求以及消费者对自适应巡航控制、车道保持辅助和自动紧急制动等风险缓解功能的需求。
ADAS已成为SDV应用的基础,成为汽车制造商进入互联和自动驾驶功能的切入点,同时促进了安全逐步改进。该细分市场还得益于不断扩展的传感器部署和利用雷达、激光雷达和摄像头数据的人工智能驱动算法,以增强预测驾驶安全。
自动驾驶软件很可能成为增长最快的领域,这得益于人工智能、传感器融合和机器学习的进步,这些技术使得从三级条件自动化逐步实现五级全自动驾驶。
OEM和科技公司正在将投资投入到基于神经网络的感知与决策堆栈以及冗余安全架构上。这一增长得益于消费者愿意采用自主功能的意愿,以及在特定场景下对有限运营领域的监管批准。
推进类型
电池电动汽车(BEV)细分市场在2025年占据市场领先地位,约占45.2%的收入份额,反映出电动传动系统与软件定义汽车架构之间的内在契合。纯电动车本质上需要复杂的电池管理系统、动力总成软件控制和集成热管理。
再加上消费者对零排放车辆的偏好上升以及政府积极的电气化规定,纯电动车成为实施软件定义汽车(SDV)最具吸引力的平台。
随着电动汽车制造在全球规模化以及固态电池和快充基础设施的不断发展,纯电动车预计将在2025年至2032年间实现最高的复合年增长率,超越其他动力类型。
其以软件为中心的框架更易于通过OTA升级,支持持续的功能增强和生态系统连接,使其成为持续创新的中心。混合动力电动汽车(HEV)和插电式混合动力(PHEV)仍处于过渡阶段,而燃料电池电动汽车(FCEV)在未来几年有望成为一个重要的细分市场。
区域见解
北美软件定义汽车(SDV)市场趋势
得益于美国先进技术生态系统和监管清晰度,预计北美将在2025年占据软件定义汽车市场约32%的份额。
美国交通部和国家公路交通安全管理局(NHTSA)为自动驾驶车辆的测试和部署提供了全面的指导,营造了有利于创新的环境。该市场还将受益于世界领先的汽车原厂制造商、特斯拉、英伟达和谷歌等科技公司,以及在该地区深度投资的一级供应商(Tire1)。
加利福尼亚和密歇根依然是支持试点项目和车队部署的创新中心,同时大量聚焦出行初创企业的风险投资也推动了生态系统的发展。投资机会丰富,包括可扩展平台开发、SAE三级及以上自主性,以及针对不断演变的法律框架量身定制的网络安全解决方案。
欧洲软件定义汽车(SDV)市场趋势
由于其强大的汽车传统,以及欧盟绿色新政框架下的前瞻性监管协调,欧洲预计将实现增长。欧盟严格的二氧化碳排放目标和车辆安全要求要求OEM厂商整合强大的SDV功能,尤其是ADAS和电气化架构。
德国的工业实力使得区域控制架构和软件平台标准化能够早期部署,以配合提升车辆安全和信息娱乐系统的努力。英国设立专门的自动驾驶车辆测试区,以及法国对互联基础设施的投资,为自动驾驶车的采用提供了有利的环境。
欧洲SDV市场的竞争格局以OEM厂商与技术供应商之间显著的合作为特征,促进了互作性并加速了创新周期。投资流向聚焦于网络安全、数据隐私合规和移动即服务(MaaS)模式,反映城市化趋势,要求需求响应且可持续的出行解决方案。
亚太软件定义汽车(SDV)市场趋势
亚太地区预计将成为最大且增长最快的软件定义汽车市场,预计到2025年将占据约40%的份额,并从2025年至2032年创下最高的复合年增长率。区域市场主要由中国积极的新能源汽车(NEV)采购、庞大的制造基础和前沿的数字基础设施发展推动。
中国通过新能源车信用体系和大量补贴项目提供的监管支持,加速了电动汽车和自驾车的普及。比亚迪、蔚来和长城汽车等领先汽车制造商正在整合符合政府目标的先进软件平台。
日本在汽车电子和自动驾驶汽车测试方面的优势,助力了快速的数字化转型。印度和东盟市场受城市人口密度和数字基础设施扩展推动,选择性地采用软件定义汽车,强调具成本效益的连接解决方案和适合新兴市场条件的软件平台。
该地区的监管具有形成性,但越来越符合全球标准,提供了在软件本地化、云边缘混合计算模型以及针对区域出行需求的车队管理服务方面的投资机会。
竞争格局
全球软件定义汽车(SDV)市场结构呈现适度整合,领先企业占据约55%的全球收入份额。
大众汽车股份公司、丰田汽车公司、特斯拉、宝马集团和戴姆勒股份公司等汽车巨头通过专有软件平台和战略联盟占据主导地位。一级供应商,包括博世、大陆、Aptiv和英飞凌,在嵌入式系统、传感器和安全软件开发中至关重要。
SDV市场格局体现了一个混合竞争生态系统,平衡了整合的OEM控制与合作软件提供商及面向OTA服务和AI驱动自动驾驶软件解决方案的新兴纯技术公司。市场动态有利于跨技术合作伙伴关系和平台生态系统,从而实现敏捷性、可扩展性和缩短上市时间。
| 总成本 | 6600 | 100% |
| 总成本 | 13600 | 100% |
| 总成本 | 29500 | 100% |
智能座舱架构与芯片- 显示篇

作者 | Rick
更多信息阅读原文,关注作者知乎
https://zhuanlan.zhihu.com/p/648081976
一、概述
在智能座舱的发展历程中,显示屏的个数越来越多,分辨率和显示屏的尺寸也越来越大。这已经是不可逆转的趋势。传统的座舱显示屏需要一颗主芯片支持一块屏幕,这在功能上和成本上都不是很好的做法。最新的智能座舱解决方案中,一芯多屏是必须要支持的功能,区别在于采用什么样的技术途径。本章节将主要讲述智能座舱中显示子系统的硬件相关技术。如下图所示,智能座舱内部所需要支持的显示屏包含这些:
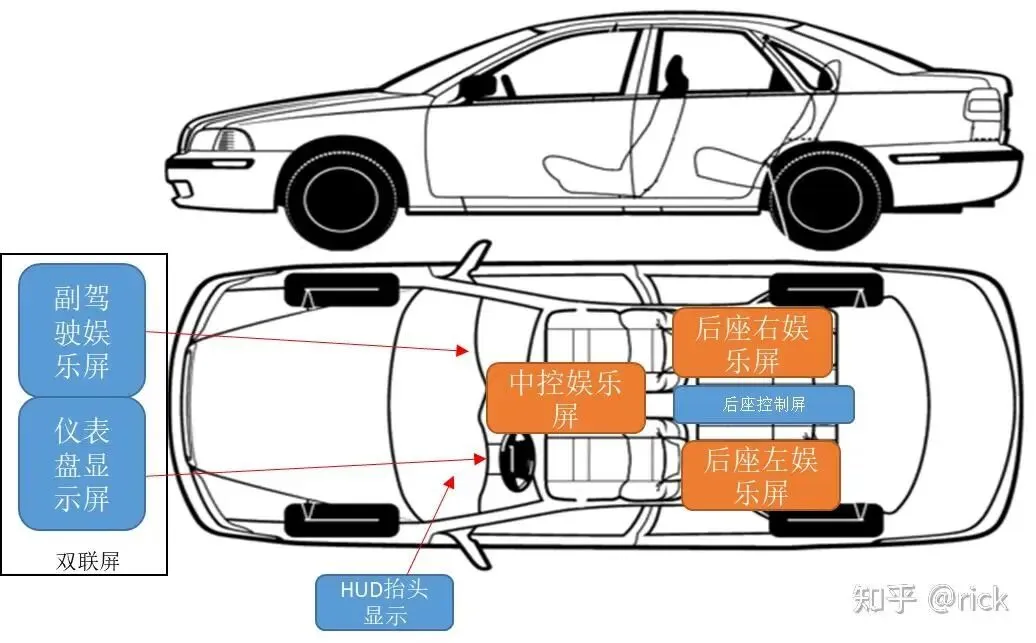
· 仪表屏和副驾屏

· 中控娱乐屏

· HUD

· 后排娱乐屏

· 后排控制屏

二、座舱显示架构
根据最新智能座舱发展的趋势来看,车载显示屏硬件技术需要支持一芯多屏。使用一颗CDC座舱芯片,要尽可能地满足如上所述多个显示屏的显示要求。这样一来,可以尽可能地节省成本和功耗。将原来需要多颗芯片才能支持的屏幕功能,尽量集成到一颗高性能的SOC芯片上来,是当前智能座舱发展的客观需求。
一种符合智能座舱CDC一芯多屏需求的车载显示屏的基本架构如下图所示:
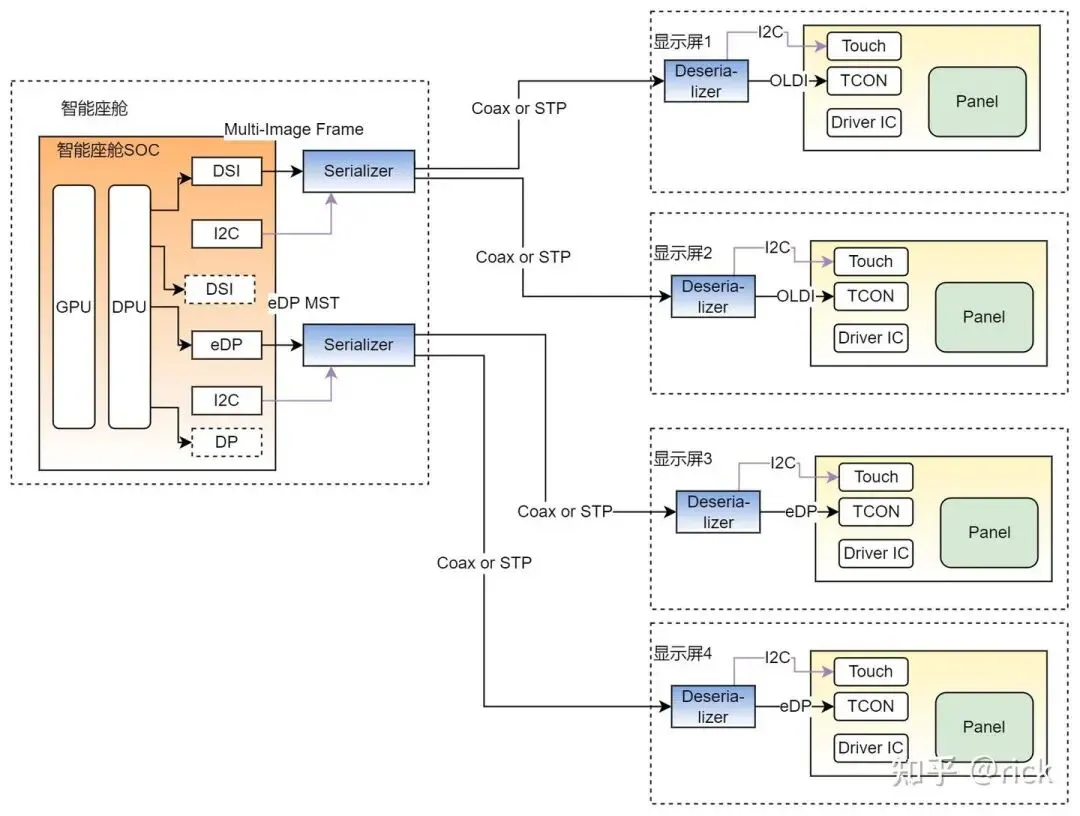
根据上图所示,可以看到,智能座舱CDC的显示子系统包括如下技术:

三、显示屏原理
本节将简要介绍显示屏的基本原理。
显示屏控制系统主要包含2大类芯片,一个是负责驱动显示屏,实现行列显示的驱动芯片,称为DriverIC。另一个是负责控制DriverIC的任务分发和控制芯片,称为TCON(时序控制)。
显示驱动芯片DriverIC,是显示屏成像系统的重要组成部分,其主要工作是驱动显示屏的像素点实现点亮或者关闭,并控制光线强度和色彩等。
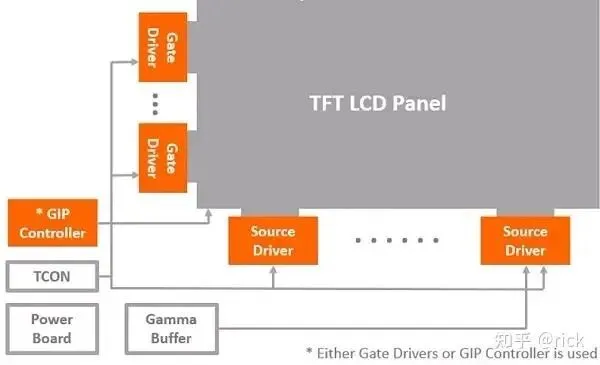
显示驱动芯片分为源驱动器(Source Driver)和门驱动器(Gate Driver)。Gate Driver:连接至晶体管Gate端,负责每一行晶体管的开关,扫描时一次打开一整行的晶体管;所以也称为Row drivers。Source Driver:连接到晶体管的source端。当一行晶体管被Gate driver打开(ON)时,Source Driver IC才能够将控制亮度、灰阶、色彩的控制电压加载到这一行的每个像素点上。因此,Source Driver也称为Column Driver。
DriverIC在显示屏中的结构可以参见下图所示:
时序控制芯片TCON(Timing Controller) 是显示屏模组的主控芯片。它主要负责分析从CDC SOC传来的信号,并拆解、转化为Driver IC可以理解的信号,再分配给Source/Gate driver去执行。
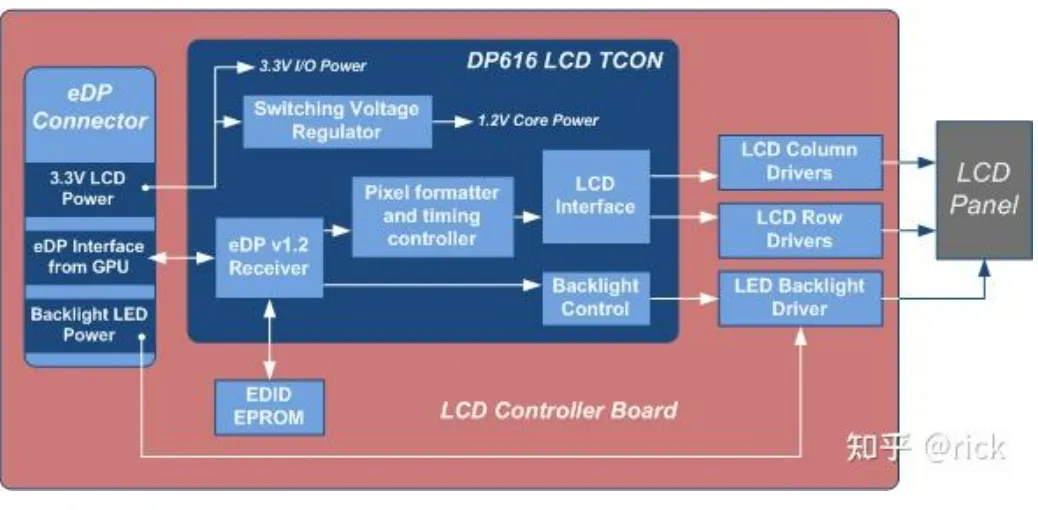
下图是一个典型的eDP TCON接口系统。SOC通过eDP通道,将显示数据传送到eDP TCON芯片中。
TCON有2个主要功能:
1.接收来自SOC的eDP信号;
2.产生行(送给row drivers)和列(送给column drivers) 显示信号,并按规定好的时序发送到Row/Column Driver IC上;
在T-CON与Gate/Source之间的信号传输以前是以LVDS为主,现在比较流行的则是LVDS的升级版,主要是mini-LVDS(by德州仪器)和RSDS(ReducedSwing Differential Signaling by国家半导体)。这两种规格现在也渐渐落后了,取而代之的是Advanced PPmL(Point to Point mini LVDS)以及V-by-One HS的配套标准CalDriCon。所以在T-CON处需要有一个输出mini-LVDS/RSDS/CalDriCon/Advanced PPmL信号的Transmitter,而在Source/Gate IC那里则需要有相应的Receiver。
当收到信号后,Row Drivers逐行打开晶体管;而Column Drivers则将不同级别的电压加在这一行的每一列像素点上,从而实现像素点的色彩,亮度区别。
TCON芯片实现的难点在于,根据显示屏分辨率和刷新率的不同,需要产生满足时序的行列信号,给到Source/Gate Drivers。分辨率越大,需要显示的像素点就越多;刷新率越高,则要求TCON产生刷新数据的时序越快。并且对Gate/Source Drivers和LCD像素点改变状态的延时要求也越高。当分辨率和刷新率两个结合起来时,要求TCON处理的数据量越来越多,所产生的行列时序信号也就要求越高。
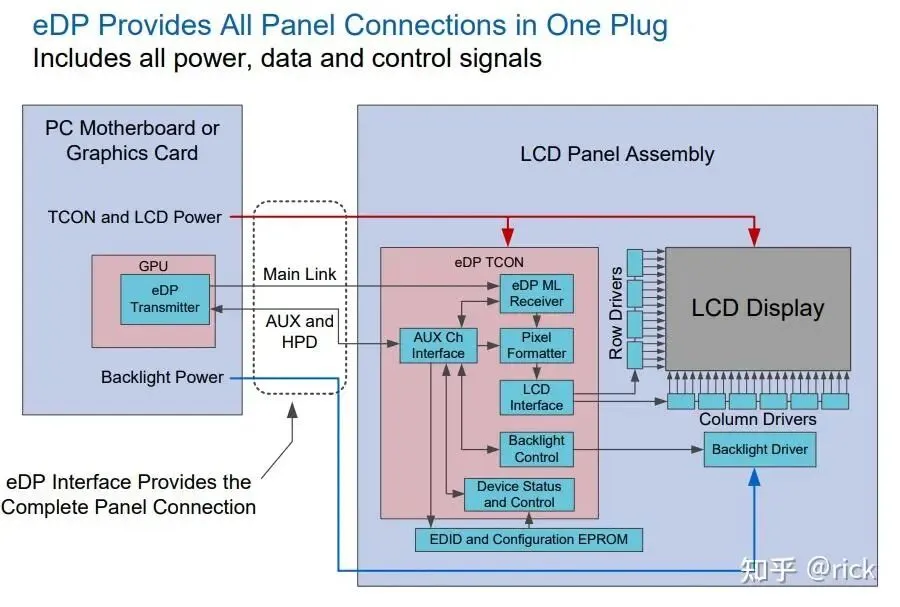
下图是一个eDP接口的LCD显示系统示意图。可以看到来自GPU的显示数据,通过eDP接口传输到LCD屏上的TCON芯片中(如果距离过长需要增加SerDes通道)。eDP ML Receiver将eDP数据送给Pixel Formater模块,产生行(Gate)和列(Source)显示信号。Row / Column Drivers 接收来自LCD Interface的信号(mini-LVDS/RSDS/CalDriCon/Advanced PPmL),并实现LCD屏的显示刷新。
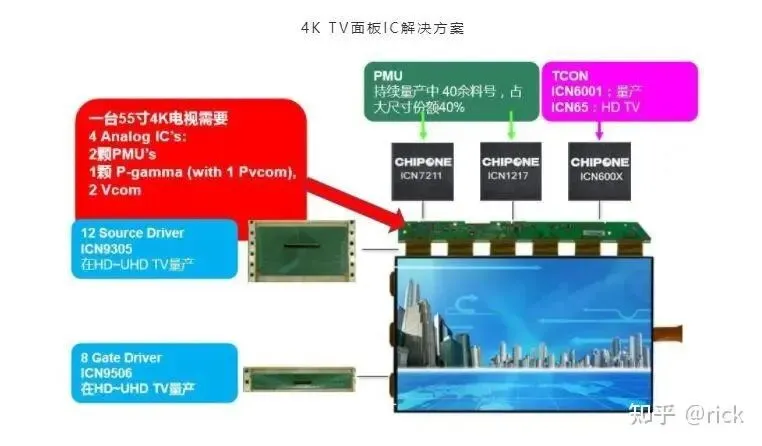
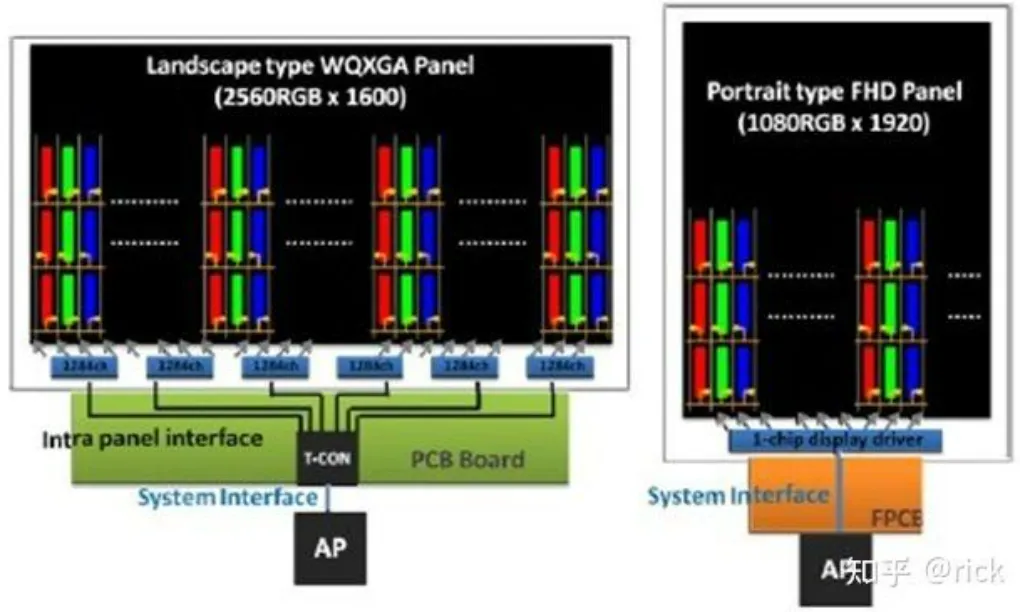
在高清电视或者车载显示屏方案中,每块屏幕都需要一颗TCON芯片。如果屏幕尺寸扩大,则Driver IC的需求数量大幅增加。如下图,分别需要12颗Source Driver和8颗Gate Driver,另外还需要两颗PMU(电源管理芯片)及3颗Vcom(电压校准芯片)
上面说的都是显示器的情况,手机则稍微有点不同。手机因为各种芯片的功能更加集中,CPU/GPU等相当于电脑主机的芯片都集中在了应用处理器AP(ApplicationProcessor),而DDIC也是一个芯片集合了所有的功能。所以信息从AP出来以后以后会直接通过MIPI DSI接口进入DDIC,而DDIC直接就可以控制TFT了,不需要那么多的接口。
以上内容,介绍了显示屏的主要原理,那么接下来就要了解AP与显示屏之间有哪些接口技术。
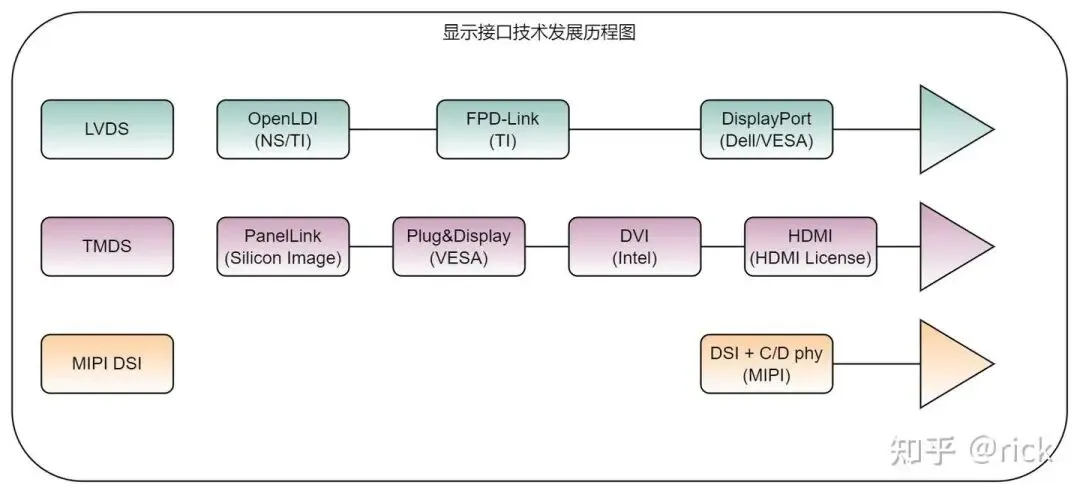
四、显示接口溯源
如果需要将显示数据从SOC主芯片传送到显示屏并完成显示,需要2大类显示接口技术。一种是从CDC SOC到TCON的显示接口,另外一大类则是从TCON到Gates/Sources 。后者主要在显示屏内部,由显示屏厂商实现。前者则需要考虑得更多,因为需要兼容不同的SOC,它们对显示接口技术的选择,影响了TCON的输入标准。
虽然本文主要讨论的是车载显示接口,但这些显示接口技术的历史来源主要是基于2大应用场景:电视机或者个人计算机。因此,我们将首先回顾一下数字视频接口技术的发展,与车载环境相关性不大的将会被省略。
· LVDS:
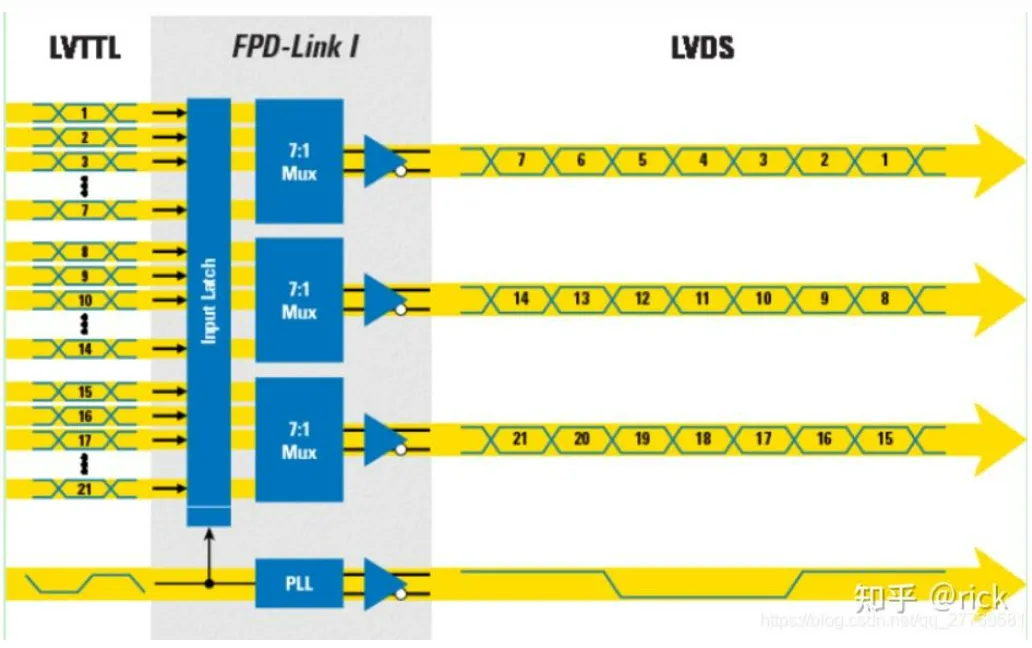
最早由National Semiconductor(国家半导体公司,后被德州仪器收购)提出,基于LVDS(Low-Voltage Differential Signaling 低压差分信号)技术,将并行的数字视频信号转为串行传输。它的每一对LVDS差分信号线传输的是7bit数据。如果要传输RGB666,需要使用4对LVDS差分线。基于LVDS技术的传输接口标准主要有OpenLDI,FPD-Link,DP(Display Port)/eDP等;
· TMDS:
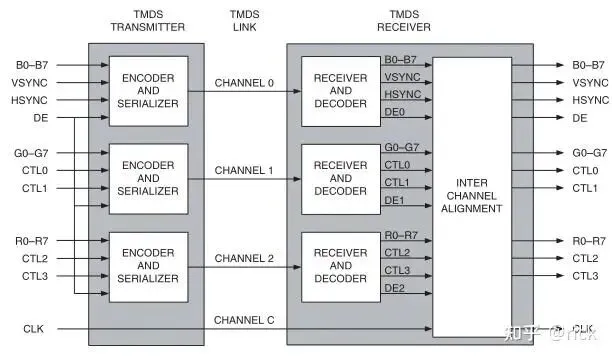
最早由Silicon Image(现在已经被Lattice Semiconductor收购)所研发的技术解决方案,称为TMDS (Transition-Minimized Differential Signaling)。这个技术和LVDS在物理层面上有些相像,但是在通信协议上则完全不同,它采用了IBM的8b/10b的编码方式,可以减少信息的错误的产生并支持更长的线缆长度。在传输RGB888 的图像信号时,它首先将一路8bit并行信号(R/G/B分量分别为8/8/8bit)串行化为10bit输出,然后在接收端再解串,将10bit转换为8bit。
TMDS前8位数据经过编码后,第9位接编码方式,第10位作用是DC均衡。
一条TMDS信号通道传输8位数据,传输R'G'B'数据需要三条TMDS信号通道,另外还需要一条时钟通道。每一个通道其实也是一对差分信号线。
基于TMDS的传输接口标准主要有DVI,HDMI,DFP等。
· MIPI DSI:
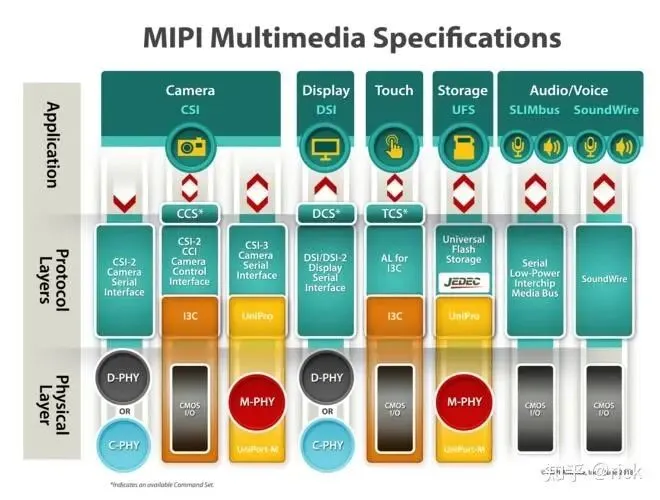
与LVDS或者TMDS不同,MIPI DSI主要用于手机等移动设备的显示屏接口。MIPI的全称是(Mobile Industry Processor Interface Alliance),它是2003年由ARM、英特尔、诺基亚、三星、意法半导体和德州仪器共同创立的一个全球的开放组织,其主要目的就是发展移动生态环境的接口标准。经过十几年的发展,目前在全球已经有250多个会员公司,而且随着移动生态的发展,MIPI制定的标准已经进入到了人工智能、物联网、虚拟与增强现实、汽车、照相机、工业电子与医疗设施等等领域。
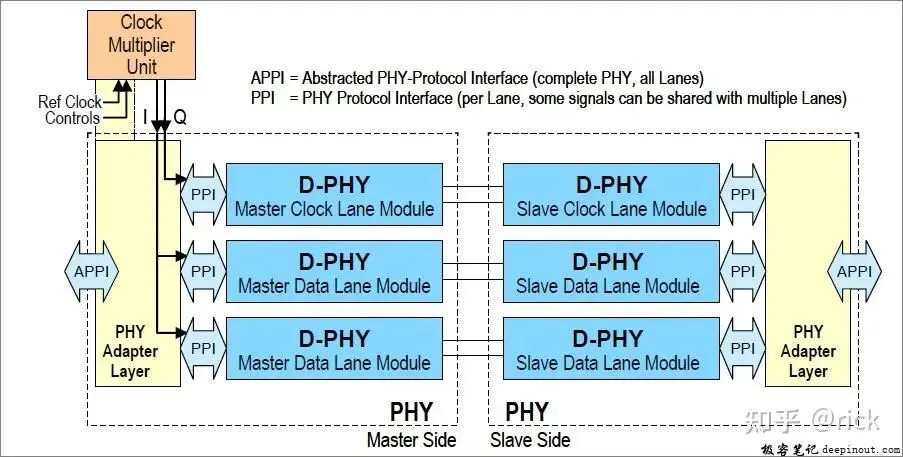
MIPI将接口的物理标准与其传输协议分开定义。目前MIPI规定了三种物理标准,分别是M-PHY、D-PHY和C-PHY。其中M-PHY传统上是用在当做芯片与芯片之间的高速数据传输,而D-PHY则被用来连接摄像头与主芯片组以及显示屏与主芯片组。后来MIPI又在D-PHY的基础上,发布了同样用途的C-PHY标准,可以算是对D-PHY标准的升级。
MIPI DSI(Display Serial Interface)是一个应用于显示技术的串行接口。它以串行方式向外围设备(实际上是液晶显示器)发送像素信息或指令,并从外围设备读取状态信息或像素信息。在传输过程中,它享有自己独立的通信协议,包括数据包格式和纠错检测机制。
· 总结
根据上述简要介绍,我们可以总结一下,可以使用在车载环境下的数字视频接口技术溯源如下图所示:
显示系统数字视频接口的规格为:

HDCP:High-bandwidth Digital Content Protection,高带宽数字内容保护。EDID:Extended Display Identification Data,扩展显示标识数据。DDC:Display Data Channel,显示数据通道。DMT:Display Monitor Timing,显示器时序规范。P&D:Plug and Display,即插即用。DSC:Display Streaming Compression,显示流压缩技术,可以实现将Display数据进行压缩后再传输,以节省带宽,支持高清视频传输。最高可达3:1的压缩比率。
五、接口技术
5.1 OLDI
在讨论视频传输接口时,首先要了解视频数据格式。一般来说,可以有2种方法来表示每个像素的颜色。第一种是每个像素点用3种颜色来表示,分别是Red/Green/Blue,也就是3原色。如果每个颜色采用8个bit(1个字节),则一个像素点需要3*8=24bit的存储空间。第二种是采用YUV分量的方式。YUV是编译true-color颜色空间(color space)的种类,Y'UV, YUV, YCbCr,YPbPr等专有名词都可以称为YUV,彼此有重叠。“Y”表示明亮度(Luminance或Luma),也就是灰阶值,“U”和“V”表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。YUV的存储空间通常小于RGB格式,并且在容忍一定的数据损失前提下(人眼感知不到),RGB与YUV色彩格式可以相互转换。
· 视频数据格式:
18位单像素R'G'B':使用6位R'G'B'值,R5~R0,G5~G0,B5~B0。
24位单像素R'G'B':使用8位R'G'B'值,R7~R0,G7~G0,B7~B0。
18位双像素R'G'B':将两个像素表示为3个6位R'G'B'值高位/低位对;RU5~RU0,GU5~GU0,BL5~BL0,RL5~RL0,GL5~GL0,BL5~BL0。每个高位/低位对表示两个像素。
24位双像素R'G'B':将两个像素表示为3个8位R'G'B'值高位/低位对;RU7~RU0,GU7~GU0,BL7~BL0,RL7~RL0,GL7~GL0,BL7~BL0。每个高位/低位对表示两个像素。
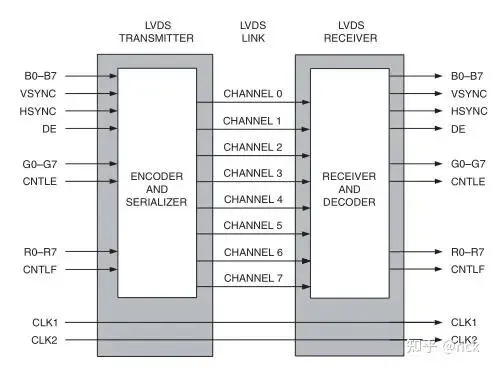
· OLDI传输
OpenLDI,LVDS链使用了8对串行数据线(A0~A7)和两个采样时钟线(CLK1和CLK2)。实际使用的串行数据线依赖于像素格式,串行数据率为7倍采样时钟频率。CLK2信号在双像素模式下用于与FDP链(一种高速数字视频接口)接收端后向兼容。
传输18位单像素R'G'B'时,OpenLDI串行线的A0~A2用于传输。
传输24位单像素R'G'B'时,OpenLDI串行线的A0~A3用于传输。
传输18位双像素R'G'B'时,OpenLDI串行线的A0~A2,A4~A6用于传输。
传输24位双像素R'G'B'时,OpenLDI串行线的A0~A7用于传输。
LVDS链支持使用32.5~160 MHz的视频采样率和时序。
如下图,为OpenLDI的LVDS链示意:
在传输显示数据时,OLDI实际上每一对差分线传输的是7bit的数据,因此一个时钟节拍内,4对差分线可以传输28bit的数据,其中包含24bit数据和3个bit的控制信号。如下图所示,D0+/- ~ D2+/-传输RGB666+DE+VS+HS,D3+/- 传输剩下的6bit RGB。因此3对差分线可以传输18bit RGB666,4对线可以传输RGB888。
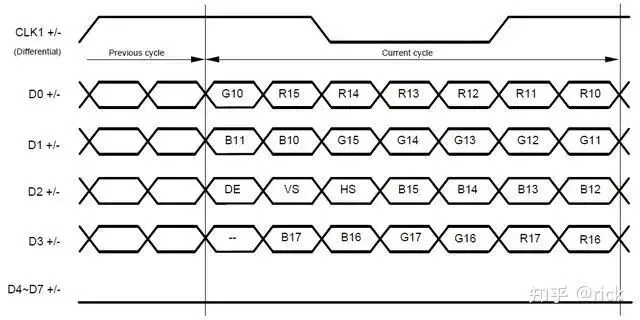
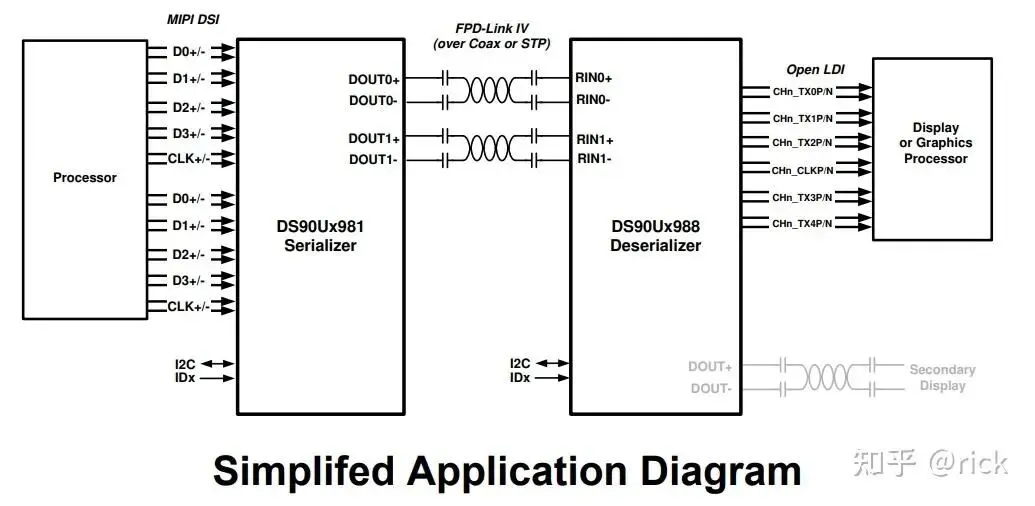
在实际使用中时,TI的FPD-link可以支持将远距离传输的视频数据,在解串器端进行反串行化,输出RGB格式的数据。然后通过OLDI接口传送给显示屏。此时显示屏的TCON芯片同样采用OLDI接口输入数据。
5.2 HDMI
HDMI是基于TMDS技术发展而来的,它与LVDS在物理层上有些类似,同样也是采用差分线对来传输高速数据信号。但是它的编码方式与LVDS不相同,而是基本采用了IBM的8b10b编码方式。
下图说明了HDMI的传输架构:
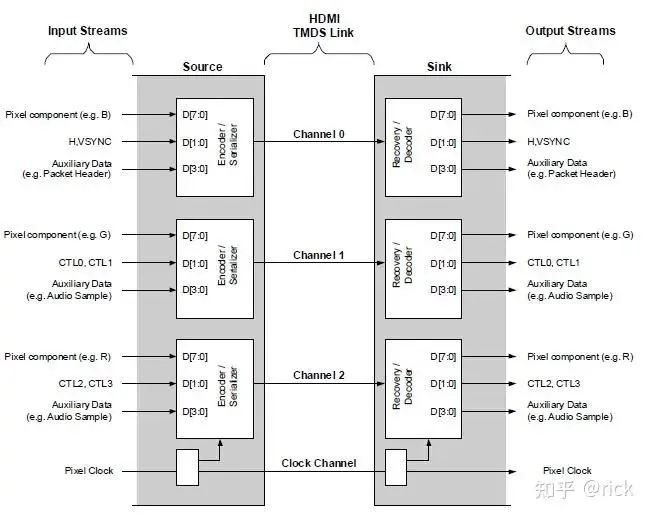
8bit的数据在source经过TMDS encoder后得到10bit数据,经过serializer后串行输出;在sink端先进行复原成10bit的数据,再通过TMDS decoder得到8bit的源数据。
· 数据传输协议
如果传输的是Video Data,并且格式为RGB,那么会占用三个通道的所有24bit输入,Channel0[7:0]用于传输B,Channel1[7:0]用于传输G,Channel2[7:0]用于传输R。
如果传输的是Data Island,则占用三个通道共10bit输入,Channel0[3:2]用于传输Data Island Header(包头),Channel1[0:3]与Channel2[0:3]用于传输Data Island Content(包内数据)。
如果传输的是Preamble,则占用1,2两个通道共4bit输入,Channel1[1:0]与Channel2[1:0]分别为CTL0,CTL1,CTL2,CTL3,用于判断接下来输入的是Video Data或者Data Island
对于Hsync与VSync,会占用Channel0通道的两个bit输入,Channel0[0]为Hsync,Channel0[1]为Vsync

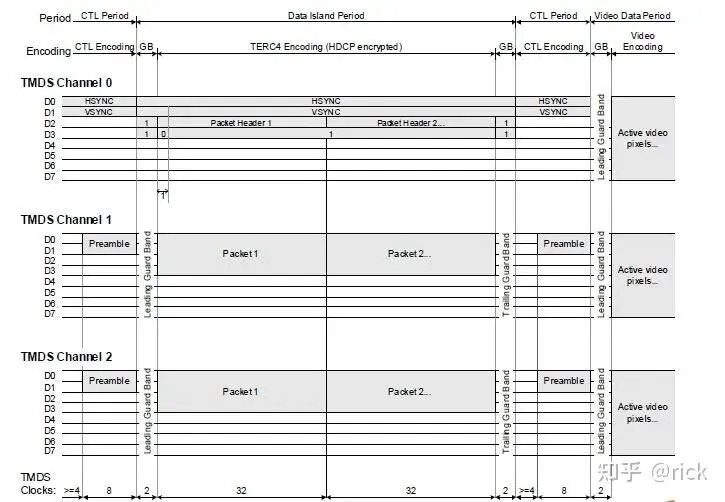
· 传输周期
HDMI的TMDS数据传输可以分为三个传输周期:

1.Control Period期间会传输Hsync,Vsync,并且在该时期的最后阶段会传输Preamble
2.Data Island Period期间会传输Data Island(数据包),也会有Hsync与Vsync
3.Video Data Period期间会传输Video Data(视频像素数据)
某帧的总体周期如下:
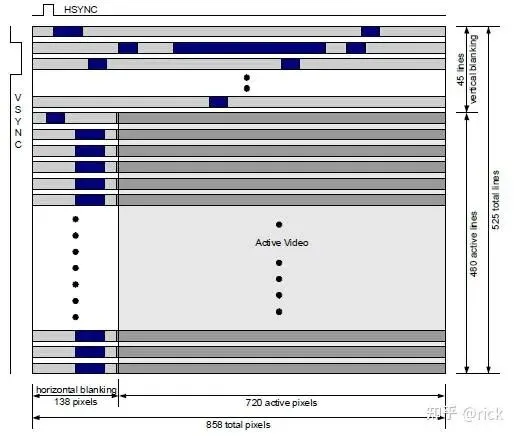
三个传输周期的过渡如下:
· 有效传输带宽
根据上面的描述,HDMI所传输的有效数据,要小于物理层提供的高速传输带宽。除了8b10b编码的损失之外,还有3个传输周期的切换所造成的损失。有效的图像传输带宽为:(720*480) / (858*525) * (8/10) = 345600/450450 * 8/10 = 61.3%;
5.3 DP/eDP
DisplayPort是由PC及芯片制造商联盟开发,由VESA(视频电子标准协会)所标准化发布的数字视频接口标准。该接口免认证、免授权金,主要用于视频源与显示器等设备的连接,并也支持携带音频、USB和其他形式的数据。此接口的设计是为取代传统的VGA、DVI和FPD-Link(LVDS)接口。通过主动或被动适配器,该接口可与传统接口(如HDMI和DVI)兼容。
eDP(Embedded DisplayPort) 协议是针对DP(Display Port)应用在嵌入式方向架构和协议的拓展,所以eDP协议完全兼容DP协议。相对于DVI/HDMI来说,eDP具有高带宽、整合性好、相关产品设计简单,该接口已广泛应用于笔记本电脑、平板电脑、手机等其它集成显示面板和图像处理器的领域。
DP的系统架构:
DP由Source端和Sink端组成。其中Source端为图像发送端,一般是GPU等产生图像的设备。Sink端为播放端,一般为显示屏等设备。
eDP的系统架构:
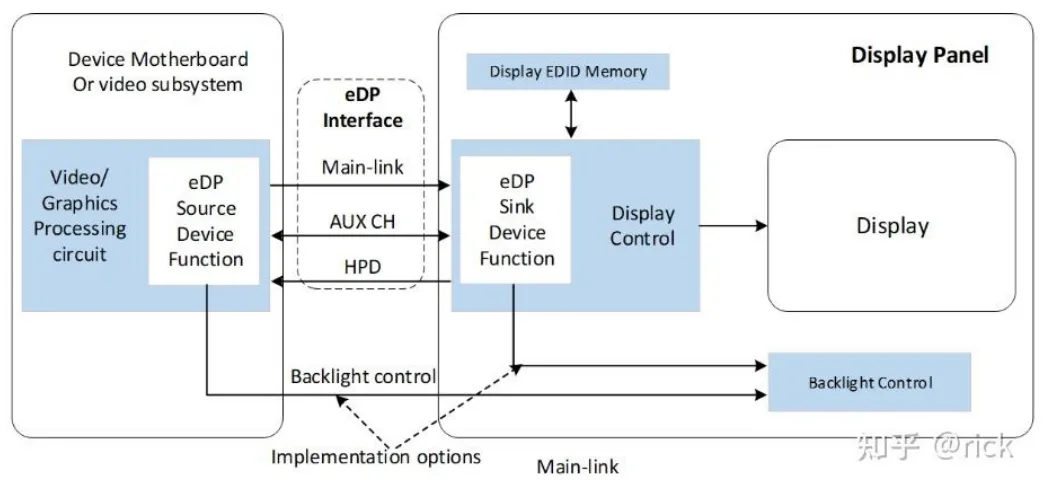
DP与eDP的区别在于:
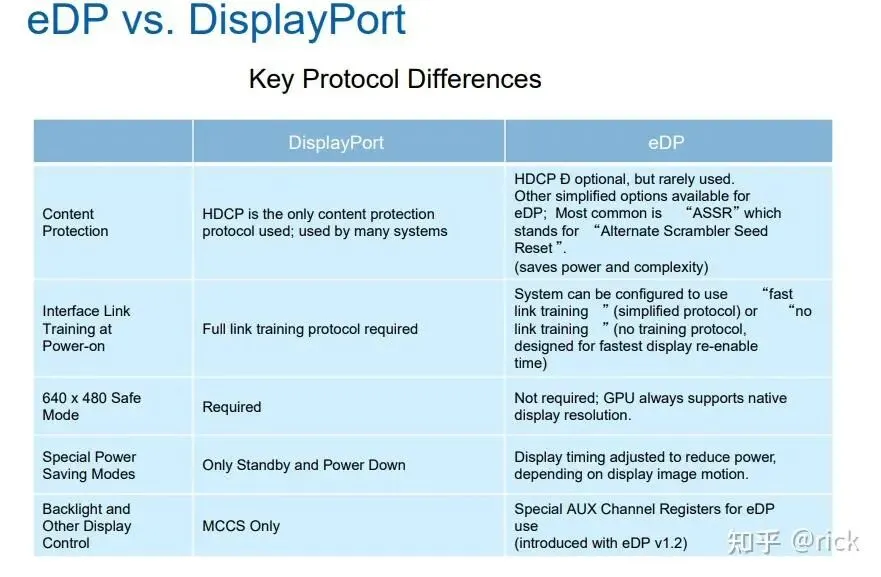
DP与eDP的主要区别,首先是DP可以通过有线线缆进行长距离(>2m)传输,用于设备之间的视频数据传输。而eDP一般用于板级,设备内部的视频数据传输。其次,由于接口外置,DP一般要求具备数字内容保护功能,即HDCP;而对于eDP来说,由于接口不外露,因此HDCP功能是可选的,几乎很少使用。
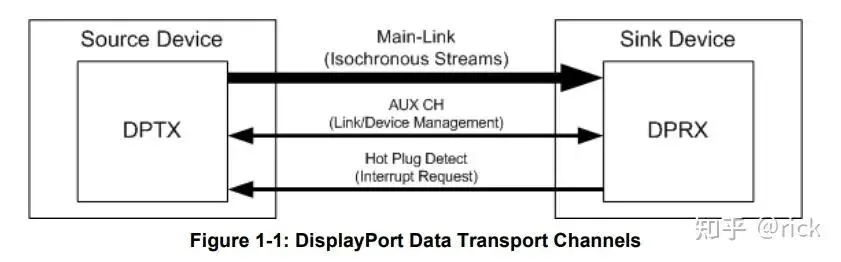
从系统架构图中可以看出,DP/eDP均需要包含3个主要组件:
1.Main-Link:
主链路是一个单向、高带宽、低延迟的信道,用以传输诸如未压缩的视频和音频的同步数据流。注意Main-Link可以为1 Lane,2 Lane或者4 Lane。其中每一lane是一对差分信号线。
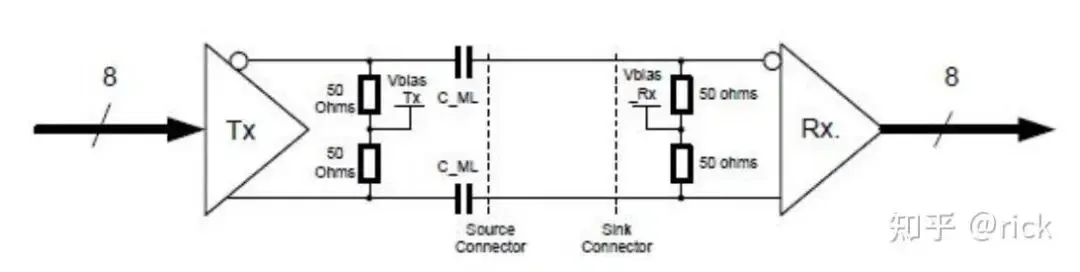
每一条Lane上所传输的数据为8b10b编码,即8bit的数据源在TX端会被encoder,扩展为10bit,其中嵌入了时钟信息。在RX端进行decoder后,恢复为8bit编码的原始数据。因为这样的设计,在长距离的传输中,才能有更好的EMI电磁兼容性设计。同时,在数据Lane的传输中已经自带时钟信息,无需再额外使用一对时钟信号线。
由于Main link的这个特性,因此在每次启动DP传输之前,或者当检测到传输过程中发生错误之后,均需要启动一个Link training的过程。这个training主要是对连接器以及线缆上的信号损失进行补偿,以确保无错误的数据传输。
Training的过程将通过AUX CH来进行,当Source端检测到HPD信号时,认为有sink插入,即会启动DP training。
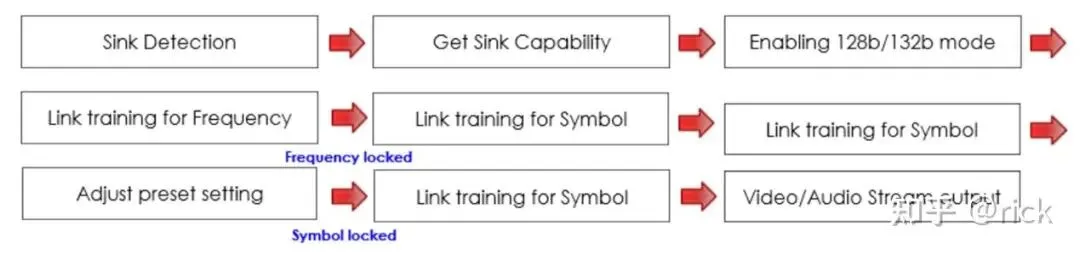
注:DP2.0协议时,将8b/10b编码改为了128b/132b编码,带宽利用率更高
下图是一个DP2.0 的Link training 流程示意图:
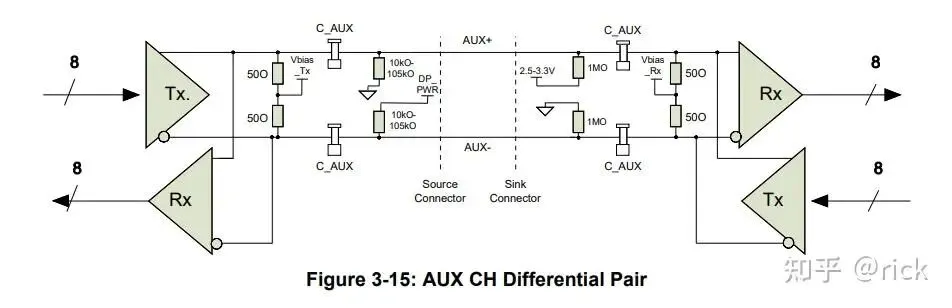
2. AUX CH:
Aux channel是一对半双工的双向数据通道,它被用来进行链接管理和设备控制等。
在Aux Channel 上传输的是自带时钟信号的曼切斯特编码,因此不需要传输时钟信号线。如下图所示:
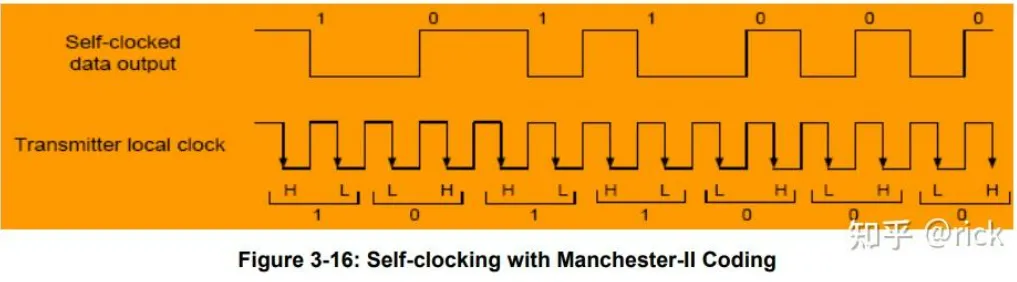
从图上可见,第一个时钟周期检测到下降沿(从H到L),信号为1;第二个时钟周期检测到上升沿(从L到H),信号为0,以后类推。
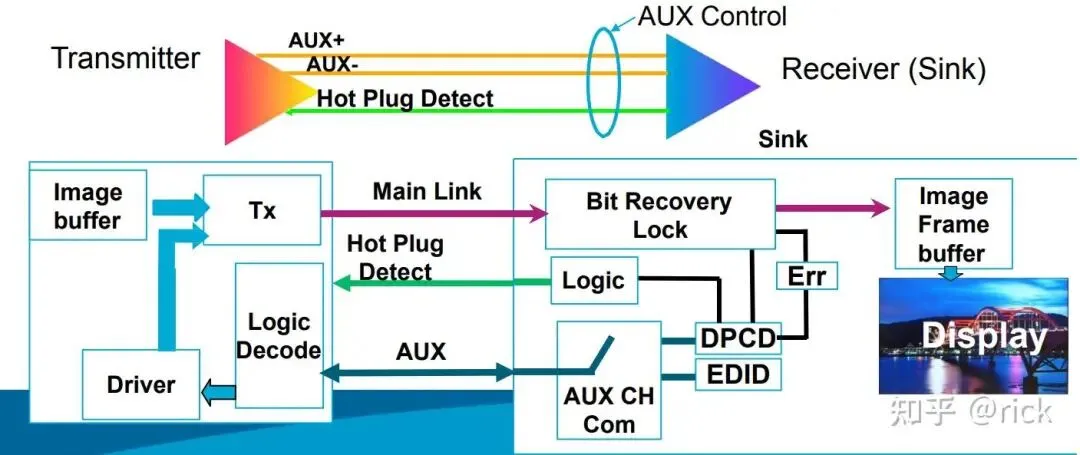
3. HPD
Hot Plug Detect,一根单独的信号线,用来从Sink端向Source端发出中断,通知Sink设备已经插入。下图为一个DP系统的示意图:
DP的传输协议
从DP传输分层架构来看,Link层提供三种服务分别是Isochronous Transport Services、AUX CH Device Services和AUX CH Link Services,其中Isochronous Transport Services主要是对于传输的音视频数据进行格式的打包填充,AUX CH Device Services主要用来管理源端和接收端的设备,比如读取EDID信息。AUX CH Link Services主要是对链路的维护配置,保障链路的正确建立,确保接收端和发送端时钟同步,确保main link上的数据准确传输。
这三种服务在Stream Policy Maker和Link Policy Maker的策略指挥下进行“服务”,受Policy Maker的控制。
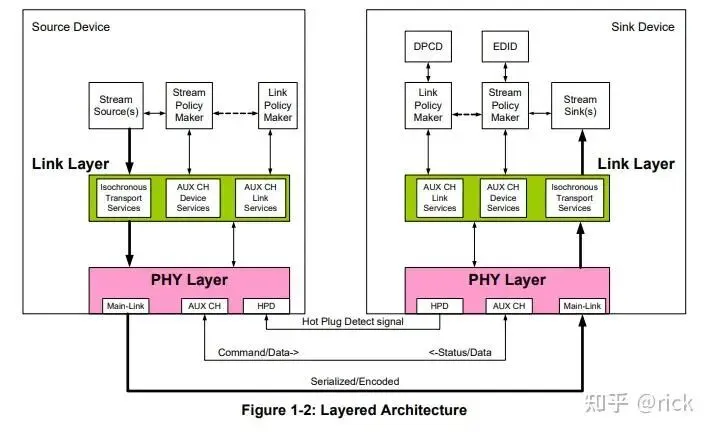
PHY层主要负责发送/接收数据。
在接收端设备中,有着显示端口配置寄存器,里面的配置数据(DPCD)描述了DPRX的功能,就像EDID描述了接收端显示器的的功能一样。Link and Stream Policy Makers分别管理Link和Stream。
在Main link的数据传输中,按如下的格式进行组包发送:
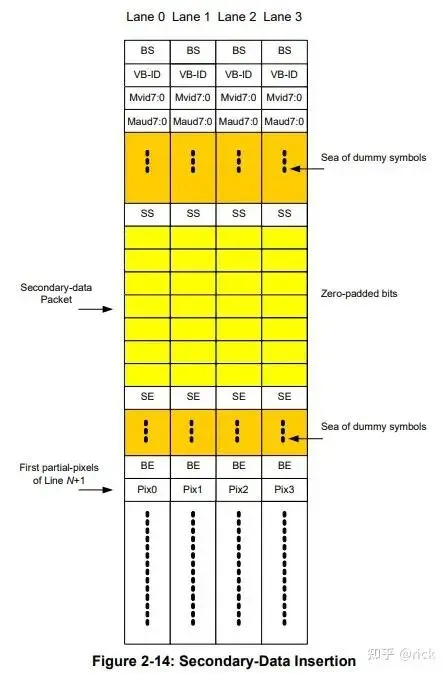
这里面要注意的是SDP,SDP是Secondary Data Packet的含义。在DP协议中,SDP被用来传输如下的信息:(1) CEA-861-F INFOFRAME SDP(2) Audio_Stream SDP(3) Audio_TimeStamp SDP
音频数据将从SDP数据包中进行发送。在DP协议的文档中,非常详细的描述了SDP的类型,以及各种传输包结构。有兴趣的话可以自行查阅,本处不再赘述。
SS和SE信号之间传输的是SDP包。在BE和FS信号之后,开始传输实际的像素点数据,直至FE信号结束。其中FS代表Fill start,FE代表Fill End。
DP的传输带宽
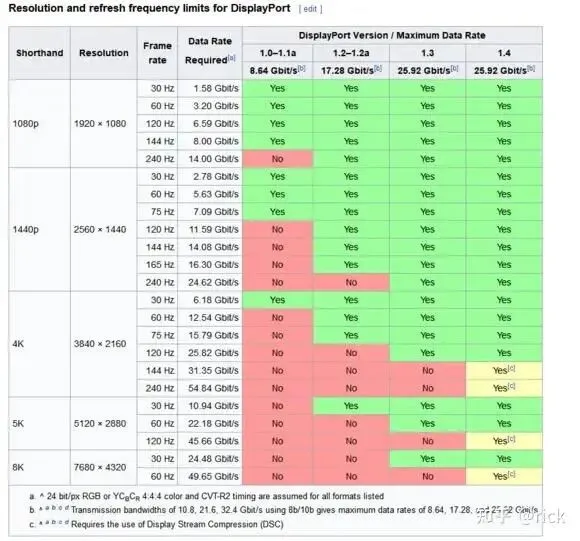
DP可以传输16,18,24bit R'G'B', YUV444, YUV422等格式的视频流信号。并且采用8b/10b的编码格式。因此在计算显示器所需的带宽速率时,需要考虑到这些因素的影响。同时还要考虑blanking的影响,采用Htotal*Vtotal来计算。下表是一个不同版本DP的理论物理带宽和有效带宽规格:

对于一个4K@60fps的视频传输要求,如果采用24bit 的RGB格式传输,它所需要的带宽为:
· 分辨率: 3840×2160(Htotal=3920、Vtotal=2222)
· 刷新率: 60Hz
· 色彩深度: 8bit
· 色彩格式: RGB 24bit(RGB:8乘以3,YC422:8乘以2,YC420:8乘以1.5)
将以上四个相关参数乘起来,即可得到所需带宽:3920 * 2222 * 60 * 8 * 3 = 12,542,745,600(12.543Gbps)
如果DP不能提供足够的带宽,也可以将24bit RGB转换为YUV422 色彩格式进行传输,此时所需要的带宽就变成:3920 * 2222 * 60 * 8 * 2 = 8,361,830,400 (8.362Gbps)
通过查找下表,即可得到满足要求的DP有效带宽。即DP v1.2以上,4-lane传输可以满足4K@60fps要求。如果DP只能支持到V1.0,那么必须采用YUV422格式进行传输才可以。
5.4 DSI
DSI是MIPI联盟定义的,位于移动应用处理器与显示模组之间的高速串行接口。所谓的MIPI,也就是Mobile Industry Processor Interface的缩写,移动行业处理器接口。显而易见,MIPI-DSI原来是为移动应用处理器所设计的,它广泛应用于手机,平板电脑等产品上。由于高通等原手机芯片厂商纷纷进军智能座舱市场,因此目前在汽车座舱内,也需要考虑如何支持DSI接口。最常见的使用情况,是从AP输出DSI信号,通过串行解串器,在显示屏端以OLDI或者eDP的方式接入。
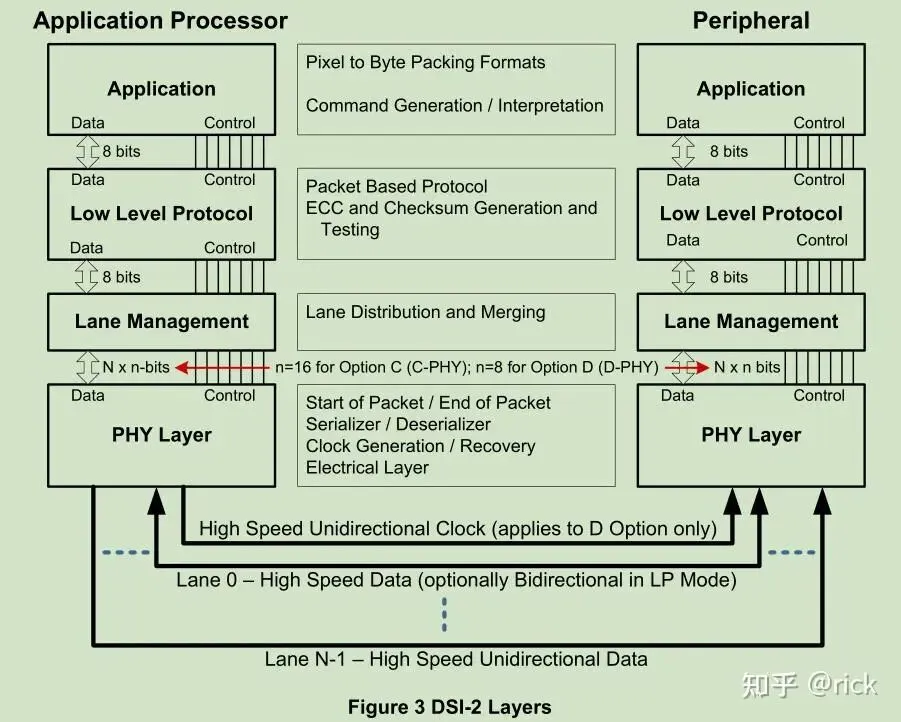
DSI 分层结构
DSI分四层,对应D-PHY、DSI、DCS规范、分层结构图如下:
· PHY 定义了传输媒介,输入/输出电路和和时钟和信号机制。
· Lane Management层:发送和收集数据流到每条lane。
· Low Level Protocol层:定义了如何组帧和解析以及错误检测等。
· Application层:描述高层编码和解析数据流。
Command和Video模式
DSI兼容的外设支持Command或Video操作模式,用哪个模式由外设的构架决定。
Command模式是指采用发送命令和数据到具有显示缓存的控制器。主机通过命令间接的控制外设。Command模式采用双向接口。
Video模式是指从主机传输到外设采用时实象素流。这种模式只能以高速传输。为减少复杂性和节约成本,只采用Video模式的系统可能只有一个单向数据路径。
DSI系统框图
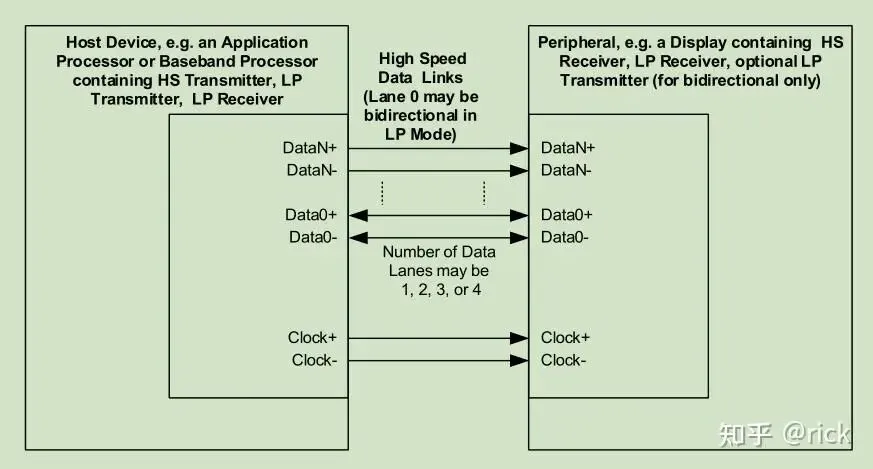
以上架构主要描述的是手机等移动设备内部采用MIPI-DSI D-Phy 接口的传输连接方式(如果是C-Phy,则物理层架构与D-Phy不同)。一个DSI port,具有一对时钟传输线,2对或者4对数据传输线。分别称为2-lane或者4-lane。如下图,D-phy的结构显示了一对clock lane,再加上2对数据lane的连接情况。
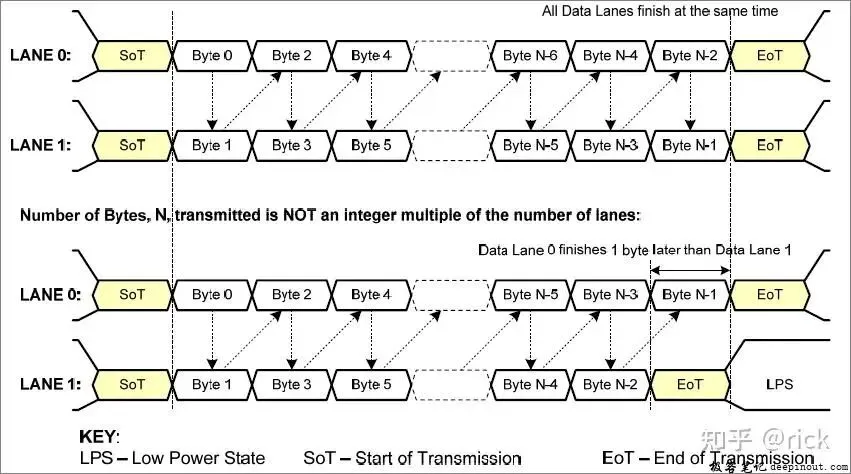
MIPI DSI是按帧的结构来传输数据的,每一帧或者是固定4字节(短帧),或者是可变长度帧(长帧)。其中每对数据lane上均以SoT(Start of Transmission)字节为开始,以EoT(End of Transmission)字节为结束。然后按字节进行逐个传输。以2对data lane为例,传输方式参见下图:
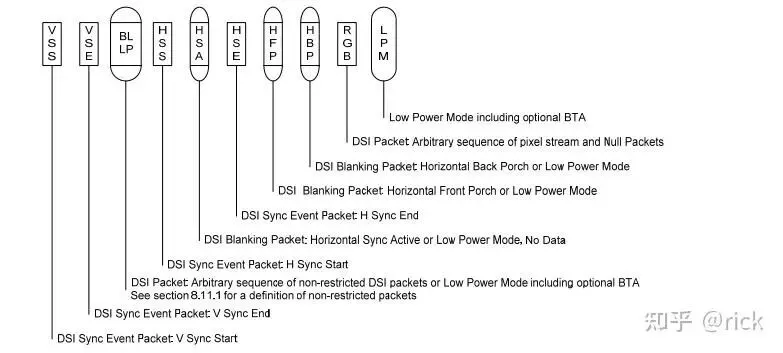
DSI上传输的长帧结构如下图所示:
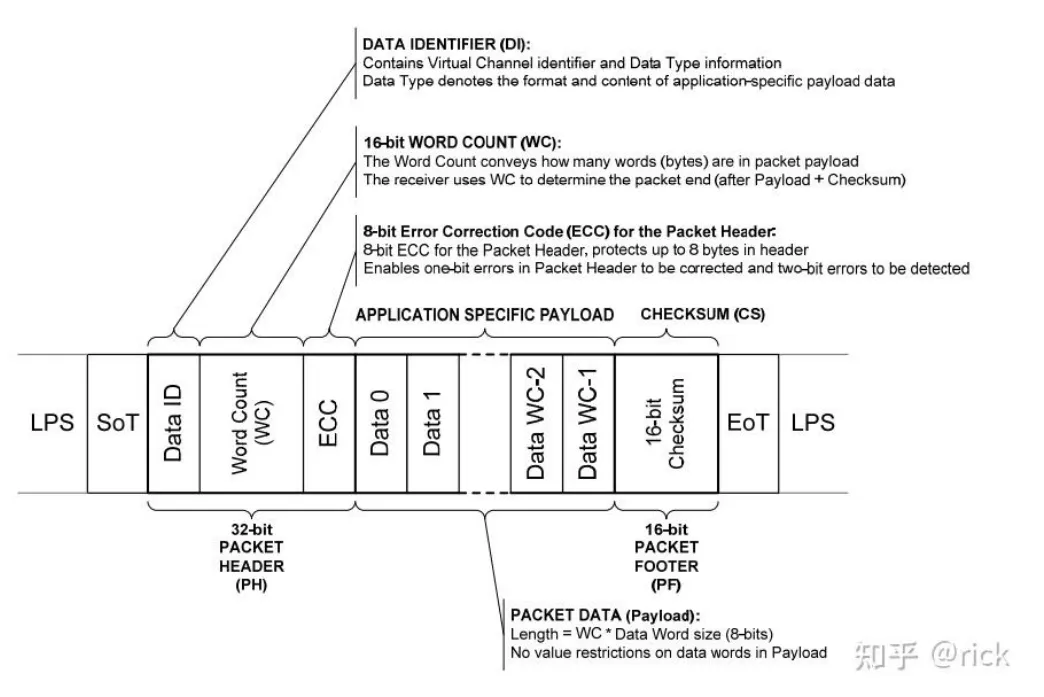
Packet data中,由多个RGB数据包所组成,每个RGB数据包如下图所示:
六、显示屏应用
6.1 仪表屏
仪表屏(Instrument Cluster) 是车内唯一需要考虑功能安全Functional Safety(Fusa)的显示设备。在传统燃油车时代,仪表盘为用户提供的信息主要有:汽车时速,发动机转速,油量信息,灯光状态信息,各种安全告警状态图标等。这其中,安全告警状态图标在是需要满足ASIL-B级别的功能安全需求的。通常把这些安全告警图标称为"telltale"。
为了让"telltale"达到ASIL-B级别的Fusa标准,需要在智能座舱SOC的显示系统上进行相关的处理。并且根据ISO-26262的规范要求,处理telltale 事件的全链路要求达到ASIL-B标准。这其中包括安全信息的初始来源,安全信息传输到SOC的通道,SOC如何生成对应的告警图标,SOC如何显示对应的告警图标,如何对比检测图标与原始安全信息是否匹配,没有发生错漏,这是仪表屏需要特别注意的。这其中,既包括了硬件设备,也包括了软件系统。例如生成telltale信息的操作系统是否满足ASIL-B级别要求?
6.2 中控屏
中控大屏也称为信息娱乐屏 ICS(Instrument Central Screen)。在智能车时代,中控大屏已经是必不可少的设备,它是用户控制全车设备,了解汽车状态,进行娱乐的最重要入口,是“第二空间”的必要载体。
在技术上,中控大屏并没有特别的要求,一般来说需要满足如下条件:
屏幕尺寸:中控大屏尺寸有 8、10、11.3、12.3、12.8、14、15、17、17.7 多种。其分辨率一般都要求在1080P以上。例如宝马i4,iX的中控屏为14.9英寸,分辨率2880*1080,像素密度达到206ppi;再比如蔚来ES8,其中控液晶屏尺寸为11.3英寸,分辨率为1400*1600,像素密度188ppi。关于刷新率,至少要求达到60Hz。90Hz应该是很快就可以达到量产条件。只有在这样的分辨率,刷新率,以及屏幕尺寸的条件下,车载娱乐系统才能取得类似于手机,平板等消费类电子的体验效果。
触摸屏:在智能车时代,大量的实体按键被取消,其功能均被集成到中控大屏上。这时就需要良好的触控来提升用户的体验。我们很难设想一个用户在中控屏上使用触摸功能时,等待半天才能得到反馈信息。在技术上,既要求中控屏能提供反应灵敏的触摸功能,又要求智能座舱SOC能提供足够快速的中断响应和处理能力。
远距离传输:在车内,中控屏与智能座舱SOC之间的距离有时可以长达10米以上。如果既要保证足够的数据处理能力(分辨率*刷新率),又要满足车载环境的要求,那么就一定要考虑Serdes传输线缆如何布置。
IC与ICS的融合:目前一部分新能源车,已经开始逐步取消了IC仪表显示屏。它们把相关的显示内容,都整合到中控大屏上,划出一块特定的区域,来显示相关的信息。这里需要注意的,主要是telltale功能如何整合到ICS屏上,如何能保证ICS屏中显示telltale图标满足ASIL-B功能。
6.3 抬头显示
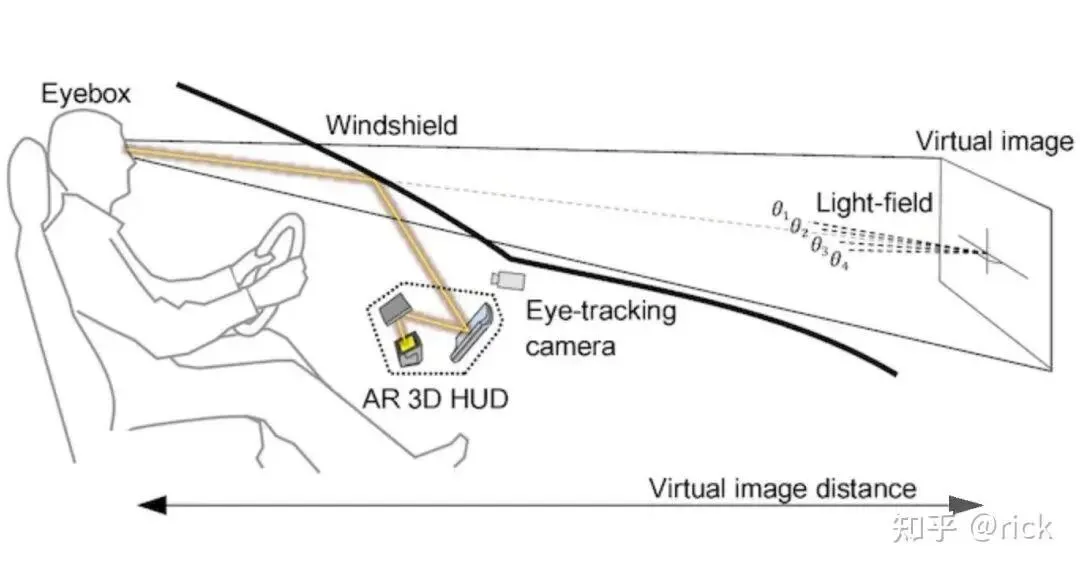
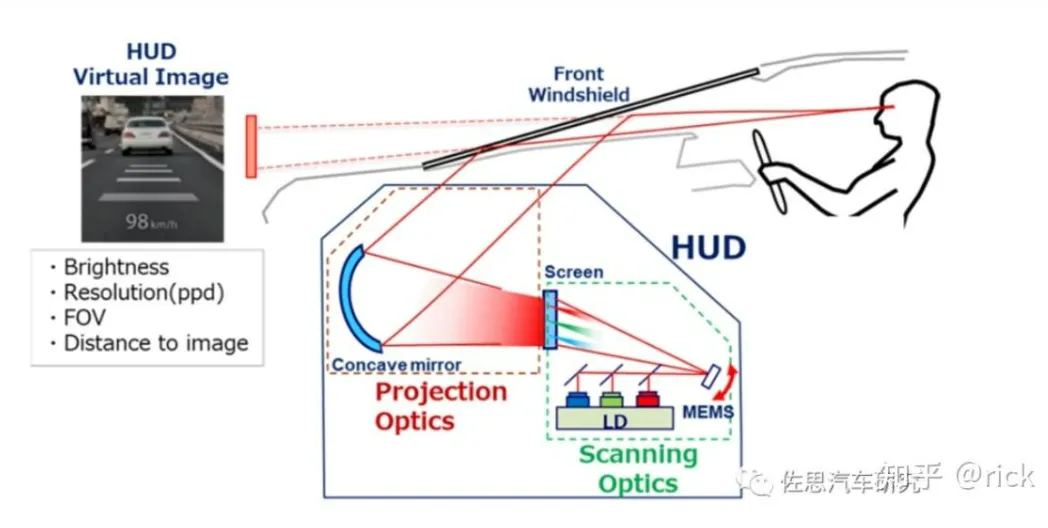
HUD( Heads Up Display)抬头显示系统,作为一种综合电子显示设备,可以将车辆的信息,如车速、油耗、发动机转速、导航等,投影到前挡风玻璃上或其他显示介质上,供驾驶者查看,从而减少驾驶者因低头或视线转移而带来的安全隐患。
其原理为将像源显示的图像信息通过透镜或反射镜系统进行放大,再通过风挡玻璃反射至驾驶员的眼部活动区域,即眼动范围或眼盒(Eyebox),在风挡玻璃前方一定距离上形成虚像,从而将仪表、中控信息更直观地展示在人眼的正前方。
根据HUD的成像方式和显示内容,目前车载HUD主要分为以下三类:
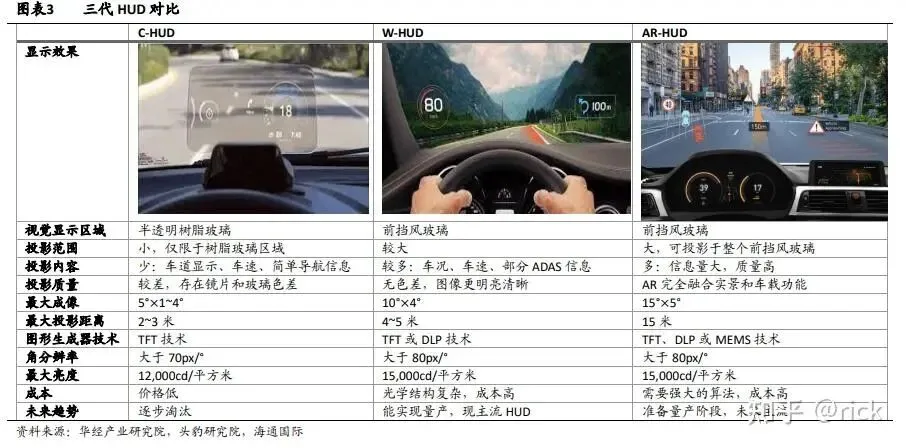
C-HUD (Combiner HUD ) :C-HUD常见于后装市场,其会在汽车仪表盘上方,加装一个半透明的树脂板,并将该树脂板作为投影介质。通过一个半反半透的曲面反射镜将像源的显示图像放大,在前方投影出一个虚像。C-HUD布置灵活,但其缺陷主要是视场角、虚像尺寸和投影距离都较小,而且重影现象比较明显,整体体验较差,并且技术上不容易解决,或将被逐渐淘汰。

W-HUD (Windsheild HUD ):可以直接将图像投影至车辆前挡风玻璃,可以支持更大的成像区域和较远的投影距离。W-HUD 的劣势在于,挡风玻璃通常为曲面反射镜,W-HUD必须根据挡风玻璃的尺寸和曲率去适配高精度曲面反射镜,因此成本相对较高,主要应用于中高端车型,目前正在向中低端车型普及。

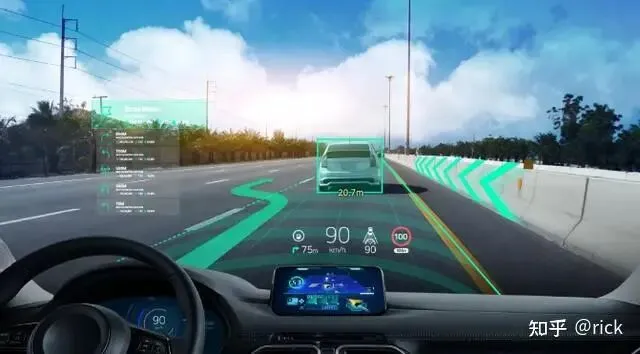
AR-HUD (Augmented Reality HUD ) :它与W-HUD一样采用前挡风玻璃为成像介质,但AR-HUD应用了增强投影面技术,其视场角(FOV)大于10°、成像距离(VID)大于7米,所能呈现的信息更丰富。AR-HUD需要通过智能驾驶的传感器(摄像头,雷达等),对前方的路况进行建模和解析,以得到对象的位置,距离,大小等要素,再把HUD显示的信息精准地投影到对应位置。AR-HUD可将投射信息与交通环境进行高度融合,例如行驶过程中的车道线贴合,前方障碍物/危险物贴合,车道偏离预警等。
AR-HUD整体显示效果出众,是智能驾驶和智能座舱的重要组成部分。
目前AR-HUD的缺点是体积较大,在整车上布置较为困难。同时技术还不够成熟,其显示效果,获取的信息精度还有待提升。
3代HUD对比
HUD的结构
从结构组成上来看,HUD主要是成像、光学投影以及软件三大块。
成像:
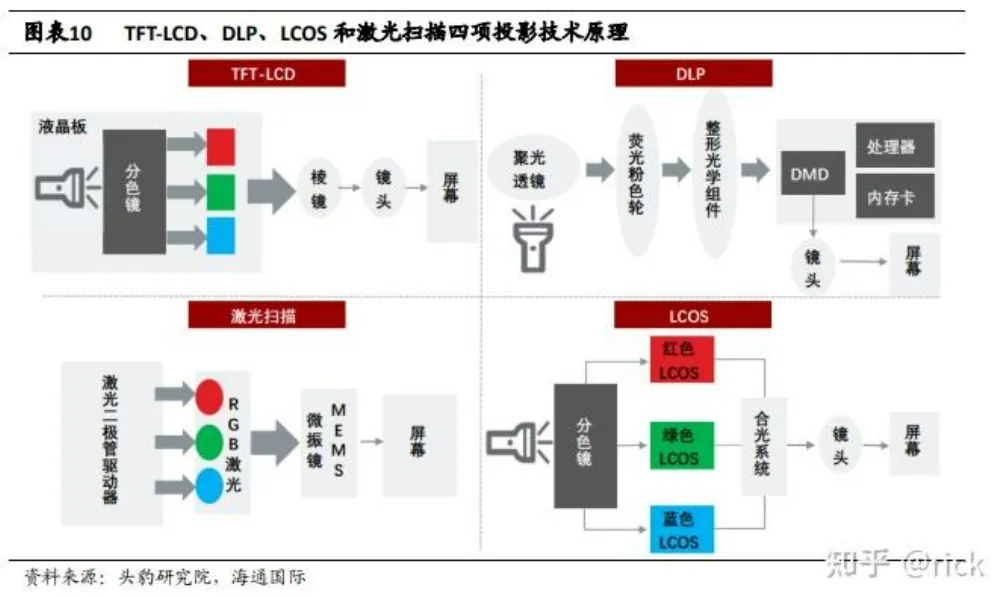
HUD的成像主体是影像源,被称之为PGU(Picture Generation Unit,即图像生成单元)。目前主流的PGU方案分为四种,TFT、DLP、LCOS、LBS。
· TFT,即TFT-LCD,是采用液晶显示面板透射成像。该方案是业界最早开发的投影方案,方案成熟。其原理是利用液晶显示面板透射成像,透过背光照明,液晶挡住了大部分光,所以亮度不够,且产生大量热量。
· DLP即Digital Light Processing的缩写。DLP 是美国德州仪器的专利技术,通过集成了数十万个超微型镜片的 DMD(Digital Micromirror Device)将强光源经过反射后投影出来。相较于 TFT 成像技术,DLP 不需要液晶偏光片,而是采用 DMD 反射式投影,减少亮度损失。DLP 技术产生的图像分辨率高,对比度高,成像逼真,但成本较高。
· LCOS(Liquid Crystal on Silicon),即液晶附硅,也叫硅基液晶,是一种基于反射模式,尺寸比较小的矩阵液晶显示装置。这种矩阵采用CMOS技术在硅芯片上加工制作而成。LCOS 技术使光源经过分色镜后投射至三片 LCOS 面板,再通过合光系统形成影像。LCOS 在分辨率、亮度、色彩等方面有优势。
· LBS,即Laser Beam Scanning,激光投影扫描。是将RGB三基色激光模组与微机电系统(Micro-Electro-Mechanical Systems,MEMS)结合的投影显示技术方案。它以激光作为光源,通过 MEMS微振镜形成投影,具有组件小、能耗低、亮度高、视场大的优点,但是成本很高,激光二极管对温度较敏感,不能达到 85℃的工作要求,因此激光扫描投影暂未大规模应用于车载 HUD。
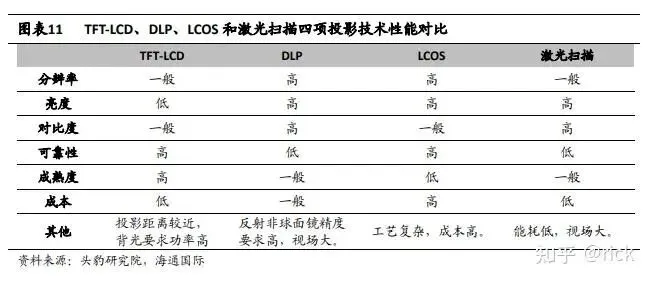
光学投影
光学投影是将PGU发出的光线放大再投影至风挡玻璃,也就是在上面的AR HUD简图中的两次反射部分——一块固定反射镜以及一块自由曲面反射镜。目前HUD整机的体积主要就是来源这个光学投影部分。
软件
软件部分主要包括AR生成器、车载地图、导航系统、语音系统等。其中,AR生成器(ARCreater)是一整套AR显示的软硬件解决方案,是通过数据及空间坐标融合,将虚拟信息渲染到实景画面中,从而形成虚拟信息和实景信息融合显示的效果。具体来看,AR 生成器需要融合以下这些数据:
· 道路元素的识别数据,通过图像深度学习的卷积神经网络产生识别模型,对前方实景感兴趣范围(ROI)进行扫描识别,获取车道线、车辆、行人、非机动车、交通标志、红绿灯等道路物体的空间坐标;
· AR导航信息,导航的路线信息包含转弯、距离、时间等,以及导航指示信息如路况、路口可通行车道信息、沿途POI、电子眼等信息;
· 其他信息,车身运行信息如车速、转速、水温、电压、胎压监控、盲区提示、ACC等信息;多媒体信息,如来电、蓝牙、FM等信息。
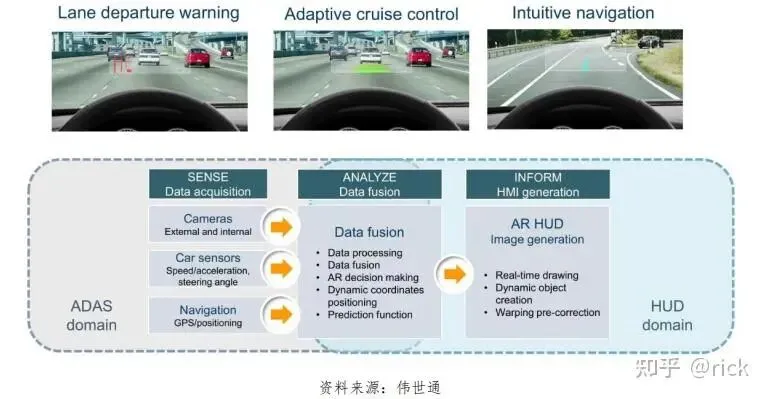
AR HUD 不仅要融合来自导航和 ADAS 系统的信息,还要考虑到精确定位、时间戳、3D 渲染、UI/UX,还要有提前预测的功能,以便于给司机提供更准确和有效的提示信息。

会议主题:TMS热管理·SDV软件定义汽车
会议地点:郑州· 中原国际会展中心
会议时间:6月26日-28日
主办单位:佛山太米汽车科技有限公司
承办单位:其琛热管理aCrd尤文TMSdv生态圈
协办单位:广东省大湾区新能源汽车产业技术创新联盟
梁坤峰,河南科技大学车辆与交通工程学院副院长、教授;
李康,上海理工大学制冷与低温工程系主任 ;

郑州国际新能源汽车研发TMS论坛

演讲1:商用车热管理系统
邀请单位:郑州科林车用空调有限公司,首席工程师,*晓峰
演讲2:工程车整车热管理系统架构设计
邀请单位:博雷顿科技股份公司,热管理负责人,黄**
演讲3:商用车电池热管理系统
邀请单位:湖北三环汽车有限公司,主任工程师, 冯**
演讲4:一体化集成式热泵系统开发
邀请单位:奇瑞汽车, 热管理 部长 丁*
演讲5:商用车集成式热管理系统
邀请单位:长城新能源商用车研究院,院长,熊*
演讲6:800V电动压缩机的设计与挑战
邀请单位:长城汽车曼德电子电器, 项目总监 俞*
演讲7:新一代商用车热管理架构方案
邀请单位:深向科技股份有限公司,副总工程师,王**
演讲8:新能源汽车热管理虚拟标定
邀请单位:河南科技大学车辆与交通工程学院副院长、教授 梁坤峰
演讲9:余热回收技术与能量综合利用
邀请单位:中国第一汽车集团有限公司研发总院
演讲10:热管理系统与整车能量管理集成优化
邀请单位:深蓝汽车科技有限公司,整车开发部高级副总工程师, 王**
演讲11:飞行器散热系统轻量化分析
邀请单位:广汽广东高域科技有限公司,
演讲12:飞行汽车新技术分析与展望
邀请单位:小鹏汇天,创始人,赵**
演讲13:eVTOL飞行三电研发
邀请单位:顺丰 丰翼科技(深圳)有限公司,技术总监,张**
演讲14:集成化热管理系统的测试与验证
邀请单位:中国汽车工程研究院股份有限公司
演讲15:替代制冷剂在汽车热管理系统的适应性研究
邀请单位:吉林大学 滕海旭博士
演讲16:面向全域优化的下一代整车热管理架构
邀请单位:理想汽车
演讲17:基于云和大数据的预见性能量管理与热管理策略
邀请单位:华为
演讲18:800V高压平台对整车热管理系统的挑战与解决方案
邀请单位:上汽大众
演讲19:新能源汽车压缩机相关
邀请单位:零跑汽车热管理 ,陈**
演讲20:热管理系统电动压缩机选型与匹配开发
邀请单位:广汽埃安新能源汽车股份有限公司
演讲21:多合一集成式热管理技术设计开发
邀请单位:上海蔚来汽车有限公司
演讲22:基于AI的热管理系统,能量一体化智能控制体
邀请单位:浙江极氪智能科技有限公司
演讲23:“电池系统热安全优化方面相关的
邀请单位:欣旺达 热管理负责人 付卫东
演讲24:替代制冷剂在汽车热管理系统的适应性研究
邀请单位:吉林大学 滕海旭博士
演讲25:商用车整车热管理系统 架构设计
邀请单位:浙江国创热管理科技有限公司(华铭智能,股票代码:300462)常务副总 ,陈辉
演讲26:好的EMC是设计出来的
邀请单位:佛山太米汽车科技有限公司,创始人, 尤超

SDV软件定义汽车· 汽车电子论坛

演讲1:当汽车成为AI 的“移动算力生命体
邀请单位:吉利亿咖通科技
演讲2:PID控制原理及温度控制上的应用
邀请单位:某公司,郭**
演讲3:汽车智能化进程中显示类产品的发展趋势
邀请单位:华阳通用,副总经理程**
演讲4:无人物流车商业化的前景与挑战
邀请单位:西威:无人车总经理,陈**
演讲5:AUTOSAR在热管理中的应用
邀请单位:佛山太米汽车科技有限公司软件专家,李**
演讲6:ASPICE标准的软件开发流程
邀请单位:苏州汇川联合动力系统股份有限公司**
演讲7:面向自动驾驶的交通数据语料生成方法
邀请单位:弗迪科技(15事业部),**
演讲8:无人驾驶在矿卡中的应用
邀请单位:希迪智驾 软件工程师 王**
演讲9:辅助驾驶与无人驾驶协同迭代的方法研究
邀请单位:宝马智驾,尤**
演讲10:SDV 架构最新成功案例及开发方案
邀请单位:上海理工大学 , 李*
演讲11:基于平台化的域控制器开发,加速SDV的大规模量产
邀请单位:长安汽车
演讲12:基于未来电子电气架构的Adaptive AUTOSAR 解决方案
邀请单位:文远知行
演讲13:从软件定义走向AI定义
邀请单位:蘑菇车联
演讲14:国产芯片在汽车电子中的应用
邀请单位:上海赛鹰微电子有限公司,总经理,黄**
演讲15:汽车AIoT服务生态
邀请单位:深圳四海万联,创始人,万**
演讲16:中国车企出海,首先要解决“失联焦虑”
邀请单位:翼卡车联网,创始人,殷**
演讲17:CMS的发展趋势分析
邀请单位:广州三目软件 张**
演讲18:HUD抬头显示有必要吗
邀请单位:发言机会开放中
演讲19:全域AI守护辅助驾驶安全
邀请单位:发言机会开放中
演讲20:车规级操作系统-汽车电子软件的基石
邀请单位:发言机会开放中
演讲21:软硬结合 打造全民辅助驾驶计算新范式
邀请单位:发言机会开放中
演讲22:中央计算平台的设计与性能优化
邀请单位:发言机会开放中
演讲23:车路云一体化动态认知地图构建关键技术研究
邀请单位:发言机会开放中
平行分论坛一:压缩机与电控
演讲1:1000V高压电动压缩机的设计与挑战
邀请单位:南京奥特佳新能源科技有限公司,*
演讲2:涡旋压缩机的振动和噪音-转子动力学分析
邀请单位:吉利汽车技术专家 段**
演讲3:转子式压缩机在降噪减振方面的一些探索
邀请单位:上海海立(集团)股份有限公司,首席技术官:周*
演讲4:集成式三合一压缩机发展趋势
邀请单位:广汽新能源汽车股份有限公司,高级经理,徐*
演讲5:商用车集成式热管理系统
邀请单位:苏州中成新能源科技股份有限公司,刘*
演讲6:电动大巴压缩机选型与应用
邀请单位:郑州科林车用空调有限公司**
演讲7:飞行汽车电动压缩机轻量化设计
邀请单位:松芝酷恒,总经理,毛*
演讲8:压缩机不同技术路线效率与成本分析
邀请单位:华域三电汽车空调有限公司
演讲9:商车用压缩机应用经验分享
邀请单位:吉利远景商用车热管理周*
演讲10:热管理系统与整车能量管理集成优化
邀请单位:上海爱卫蓝新能源科技有限公司,副总经理,张**
演讲11:厚膜在压缩机模块化上的应用分享
邀请单位:热威 ,研发经理,匡**
演讲12:集成压缩机及膜加热器的控制器方案分享
邀请单位:佛山太米汽车科技有限公司,技术总监,李**
演讲13:高速静音电动压缩机的设计与应用
邀请单位:弗迪科技 :梁**
2026TmSDV郑州国际新能源汽车研发论坛特邀嘉宾打Call邀请函
尊敬的嘉宾:
“2026TmSDV郑州国际新能源汽车研发论坛”诚邀您作为特邀嘉宾,以视频形式为年会“打Call”。相信在您和贵司的专业影响力之下,必能为年会助力,打造一个更具活力的行业平台!
 2026TmSDV郑州国际新能源汽车研发论坛
2026TmSDV郑州国际新能源汽车研发论坛
组委会
拍摄形式:
由贵司自行录制后回传给会务组剪辑
拍摄要求:建议请竖屏拍摄,,嘉宾露出半身,声音平稳,画面清晰,(建议露出公司logo)拍摄时长:20-60秒
画面参考:
【请录制视频:助力发言】
视频:助力发言(以下台词可任选其一或自行定制,但请保留年会全称、时间地点)
版本1-聚焦新能源技术,共话新能源汽车前沿。我是公司的 职位 姓名,为【2026TmSDV郑州国际新能源汽车研发论坛】打call,6月26至28,在郑州,们不见不散!
版本2-解码新能源技术核心,推动新能源汽车发展。我是公司的 职位 姓名 诚邀您一同参加【2026TmSDV郑州国际新能源汽车研发论坛】,6月26至28,在郑州,和汽车行业人一起共襄盛举!
版本3-创新不止,钻研不息,以专业技术助力新能源汽车发展。我是公司的 职位 姓名诚邀您出席【2026TmSDV郑州国际新能源汽车研发论坛】
,6月26至28,我们郑州见!
建议演讲嘉宾预告演讲摘要(可选)拍摄时长可增加 60秒
