 夜雨聆风
夜雨聆风🚗 汽车召回频发、软件复杂度十年增长近5倍,传统嵌入式开发模式正面临巨大挑战。2003年由全球巨头联合推出的AUTOSAR,已经成为现代车载软件的"宪法级"标准。不掌握AUTOSAR分层架构与通信机制,将很难胜任智能汽车软件开发岗位。
第一章 · 破冰AUTOSAR:起源与分层架构全景
在2000年代初,汽车制造商们痛苦地发现:每款新车型的ECU软件几乎都要从零开发,复用率极低,而且一旦增加新功能,就必须修改大量底层代码。这种低效导致研发成本飙升,软件缺陷引发的车辆召回事件逐年递增。为了打破僵局,2003年9月,BMW、Bosch、Continental、Ford、Toyota等巨头联合成立AUTOSAR组织(汽车开放系统架构),目标是建立开放的汽车电气/电子(E/E)架构标准,让不同供应商的软硬件实现互通,并大幅提高复用性。
📌 AUTOSAR核心目标
- ✔ 管理日益复杂、功能交织的E/E设备
- ✔ 提升产品更改、升级和跨平台移植的灵活性
- ✔ 提高E/E系统质量与可靠性,早期设计阶段就能检测错误
- ✔ 标准化基础软件、微控制器抽象层、运行时环境和交换格式
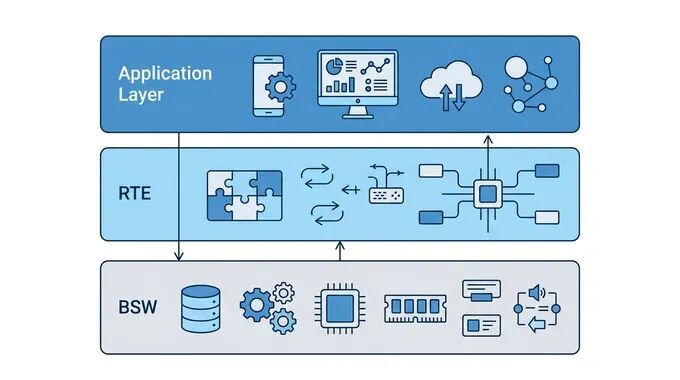
AUTOSAR最具革命性的设计就是分层软件架构。它将ECU软件划分为:应用层(Application Layer)、运行时环境(RTE)和基础软件(BSW),其中BSW向下又细分为服务层、ECU抽象层、微控制器抽象层(MCAL)以及复杂驱动。这种分层的最大好处是——上层软件组件完全不感知硬件细节,从而可以在不同车型、不同ECU之间轻松迁移。
🔖 分层解耦思想:应用软件组件(SW-C) 必须通过RTE与基础软件通信,不能直接调用BSW模块。 RTE就像是"信息高速公路的交通警察",确保组件间的交互规范且解耦。此外,基础软件中包含系统服务、内存服务、通信服务等标准模块,而最底层的MCAL则直接操作寄存器,为上层提供统一硬件API。
为什么AUTOSAR能成为汽车软件事实标准?
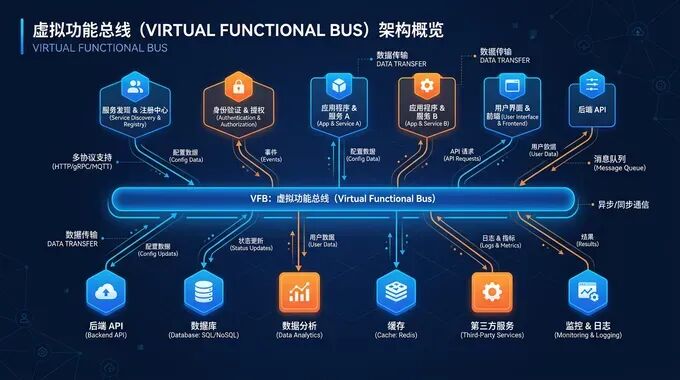
由于采用了虚拟功能总线(VFB)概念,开发人员在系统设计阶段可以专注于软件组件间的逻辑交互,而不用关心ECU具体部署位置。RTE会在配置阶段自动生成通信代码,实现ECU内部或ECU之间的无缝通信。同时规范化的交换格式(ARXML)使得OEM、Tier1和工具链之间能够高效协作。目前全球主流车厂均要求新平台必须兼容AUTOSAR,这也意味着掌握AUTOSAR架构已经成了汽车软件工程师的"入场券"。
第二章 · RTE与软件组件通信:虚拟功能总线的灵魂
AUTOSAR体系的心脏就是运行时环境(RTE),它实现了虚拟功能总线(VFB)的接口,使软件组件(SW-C)就像连接在同一总线上一样,无论实际分布在同一ECU还是不同ECU,RTE都会自动完成数据路由、同步以及事件触发。RTE负责软件组件之间的通信,并提供访问基础软件(包括OS、通信栈)的基础服务。 此外,RTE管理着可运行实体(Runnable Entity)的调度。
🔁 可运行实体(Runnable)定义
是一段由RTE启动的指令序列及相关数据集,代表组件的某个具体功能。一个组件可包含多个可运行实体,每个实体都有唯一的入口点,由RTE事件(如周期性触发、数据接收事件、操作调用事件)激活。
我们来深入理解通信机制。AUTOSAR软件组件之间通过端口(Port)进行交互,端口分为两种接口类型:发送-接收接口(Sender-Receiver)用于数据传递(如车速信号、温度值),客户-服务接口(Client-Server)用于功能调用(例如请求某服务执行计算)。所有通信都是静态配置的,意味着通信路径在系统设计时就已经确定,避免了动态绑定的不确定性,有利于实时性和安全性验证。
显式通信 vs 隐式通信
AUTOSAR针对发送-接收通信定义了两种模式:显式通信(Explicit):在可运行实体内部,通过调用RTE API(如Rte_Write_<Port>、Rte_Read_<Port>)显式地发送或接收数据,开发者完全控制数据交互时机。隐式通信(Implicit):RTE在调用可运行实体之前自动读取所有输入数据元素,并在可运行实体结束之后自动写入输出数据元素。隐式模式极大地简化了应用逻辑,保证数据的一致性,属于"快照"机制。这两种模式在实际工程中需要根据实时性要求选择。区分显式与隐式通信,隐式通信中数据一致性由RTE保证。
// 示意:隐式通信下,RTE自动读取输入信号 Rte_Read_ThrottlePosition(&Throttle_Pos); // 由RTE隐式完成 // 可运行实体内部直接使用缓冲区数据
在开发流程中,存在"RTE订约阶段"——定义组件与RTE之间的契约(数据类型、接口、端口),随后进入"RTE生成阶段",系统生成工具基于组件描述文件自动产生RTE代码。这使得开发人员能够专注于算法模型,而不用手写繁琐的通信 logic。
✨ 真实上岸案例 · 零基础也能突围 ✨
学员故事 小刘(函授大专,2024届应届生),毫无汽车行业背景。去年报名我们的MBD应用层课程 + AUTOSAR基础软件配置课程,系统学习Simulink建模、软件组件设计、RTE配置及BSW集成。经过6个月高强度实战(含基于Vector DaVinci工具的工程实践),顺利拿下极氪外包开发岗位,从事应用层软件组件开发与集成,月薪1W+。
他直言:"AUTOSAR分层思想加上RTE通信机制是整个面试的核心,王老师带着跑通一个完整ECU配置案例才让我脱颖而出。"
🚀 如果你也想快速入局智能汽车软件,系统掌握AUTOSAR方法论,我们的课程覆盖从入门到就业的全链路。
第三章 · 基础软件(BSW)精讲:系统服务·诊断·通信栈
AUTOSAR基础软件(BSW)是分层的基石,它为应用层提供标准化的驱动、操作系统以及通信、诊断服务。本章由浅入深剖析最关键的三大模块群:系统服务、诊断服务以及复杂通信栈(CAN/FlexRay/LIN)。这些模块也是实际项目中配置调试的重灾区,掌握它们就意味着掌握了AUTOSAR落地能力。
3.1 系统服务:OS、ECU状态管理器、BSW调度器与看门狗
AUTOSAR OS 基于经典的OSEK OS演化而来,向后兼容OSEK应用,同时增加了丰富的扩展API,例如GetApplicationID、StartScheduleTableAbs等。其核心特征:重要特征静态配置、基于优先级的抢占式调度、运行时保护(存储/计时等),并且可以裁剪到极小的资源占用,适用于低端控制器。 对于需要运行高等级操作系统(如VxWorks、QNX)的平台,AUTOSAR定义了操作系统抽象层(OSAL),保证SW-C可以跨OS迁移。
ECU状态管理器负责基础软件模块的初始化和关闭序列,管理ECU从启动、运行到休眠、关机的状态迁移。同时它处理所有唤醒事件,并可命令ECU进入SLEEP模式以降低功耗。BSW调度器负责将BSW模块的主处理函数嵌入到AUTOSAR OS任务中,触发周期性或事件性处理,保证了基础软件功能的实时性。看门狗管理器则在硬件看门狗之上提供"生存监控",可独立监督应用功能的执行,防止任务跑飞。
3.2 诊断服务:让ECU故障无处遁形
AUTOSAR诊断栈包含四大金刚:诊断事件管理器(DEM)——负责存储诊断事件(DTC)及关联的冻结帧数据;功能禁止管理器(FIM)——可动态禁用或启用软件组件/功能;开发错误跟踪器(DET),常用于开发阶段捕获API调用错误(例如错误模块、错误类型);以及诊断通信管理器(DCM),它通过PDU路由器与底层交互,接收诊断请求(UDS on CAN等),解析消息并路由到对应的AUTOSAR软件组件。DCM是实现刷写、读取故障码、例程控制等功能的枢纽。
📡 DCM关键位置:位于通信服务层,它与PDU路由器之间有标准接口,诊断报文经过CAN/LIN收发器→CAN接口→PDU路由器→DCM → 应用层组件处理。
3.3 通信栈深度解析:CAN / FlexRay / LIN 及 AUTOSAR COM
通信栈是AUTOSAR最复杂的部分之一。以CAN通信栈为例:从上到下包括AUTOSAR COM(位于RTE与PDU路由器之间,提供信号网关和信号组处理)、PDU路由器、CAN接口(CanIf)、CAN驱动(Can)以及CAN收发器驱动。其中CAN传输层(CanTp)负责解决CAN帧只有8字节数据长度的限制,完成长报文的分段与重组。通过这种模块化设计,更换CAN控制器仅需替换底层驱动,上层完全不受影响。
🔥AUTOSAR COM相较于OSEK COM最大的扩展是引入了COM Manager (ComM)。ComM协调总线通信访问请求,简化多个软件组件共享总线的资源管理,支持总线唤醒策略、网络管理状态机,并提供"静默通信"模式,同时控制一个ECU上的多个通道。部分特有API如ComM_RequestComMode、ComM_GetCurrentComMode 都是面试常客。另外AUTOSAR COM还增加了I-PDU组控制、信号无效化等特性,更适应现代网络管理需求。
/* 部分通信API展示(重点理解分层调用)*/
// CAN驱动层
Can_Init(),
Can_Write()
// CAN接口层
CanIf_Transmit(),
CanIf_SetControllerMode()
// AUTOSAR COM层
Com_SendSignal(),
Com_ReceiveSignal()
// COM Manager通信模式请求
ComM_RequestComMode(Channel,
COMM_SILENT_COMMUNICATION);
对于FlexRay和LIN,AUTOSAR也提供了类似的抽象:FlexRay接口(FrIf)、FlexRay驱动(Fr)以及传输层(FrTp)支持高带宽确定性通信,而LIN接口(LinIf)和LIN驱动则用于低成本子总线。这些协议栈都遵循"驱动→接口→传输→PDU路由→COM"的上行路径,彻底隔离硬件差异。
3.4 AUTOSAR方法学与工具链——从模型到量产
除了软件架构,AUTOSAR还定义了AUTOSAR方法——一种工作产品流,描述了设计、配置、生成ECU可执行文件所需的步骤依赖关系,比如系统配置输入、ECU提取、组件映射、RTE生成等。这些过程依赖AUTOSAR模板(UML子集)描述的系统信息,最终转化为ARXML文件。商用工具如Vector DaVinci、ETAS ASCET、Mentor Graphics Volcano系列能够自动生成大量RTE与基础软件代码,大幅提升开发效率。另外AUTOSAR一致性测试确保产品符合规范,实现真正的互操作性,路径包含AUTOSAR组织、测试机构以及产品供应商三方协作。
在实际就业中,熟悉一种工具链(例如DaVinci Configurator、BSW配置工具)以及基于模型的开发流程将会成为你的核心竞争力。
为什么转行/应届生更有机会?
汽车智能化浪潮下,传统机械专业背景+系统化AUTOSAR培训的组合非常抢手。我们往期学员中,近80%在结业后3个月内拿到offer,平均起薪超过1.5万元,部分优秀学员进入外包或整车厂,起薪1.5W~3W。岗位集中于:AUTOSAR软件工程师、集成工程师、BSW配置工程师、应用层建模工程师等。重点是——市场缺口极大,尤其是能独立配置通信栈和诊断模块的人才。

✅ 课程专攻方向
- ✔️ AUTOSAR分层架构与RTE代码生成原理
- ✔️ 基于Vector/ETAS工具链的BSW配置(MCAL、通信栈、OS)
- ✔️ 诊断协议栈(DEM/DCM)配置及UDS实战
- ✔️ MBD应用层开发 & 软件组件集成
- ✔️ 真实项目:搭建完整AUTOSAR工程,通过一致性测试流程
不论你是应届大专/本科,还是有经验的嵌入式工程师,通过6个月系统训练,都能迅速转型为市场急需的AUTOSAR软件人才。
结语:AUTOSAR已经成为汽车E/E开发的通用语言,是通往高薪智能汽车岗位的必经之路。但碎片化学习很难真正掌握通信栈与运行时环境的精髓,我们需要带领你亲手配置一个ECU,跑通CAN通信,驾驭诊断服务。
面试
资料
学习
路线
学习
指导
多名10年+大厂经验
工程师在线指导
学习
交流
众多开发者一起交流
助力你提升技能
