夜雨聆风
夜雨聆风传送门:
汽车底盘电控知识整理汇总
车载嵌入式 通讯/诊断 AUTOSAR/架构 整理汇总
车载嵌入式 功能安全/网络安全 整理汇总
[专栏] 汽车领域 · VMC 线控底盘 线控驱动
0 引言
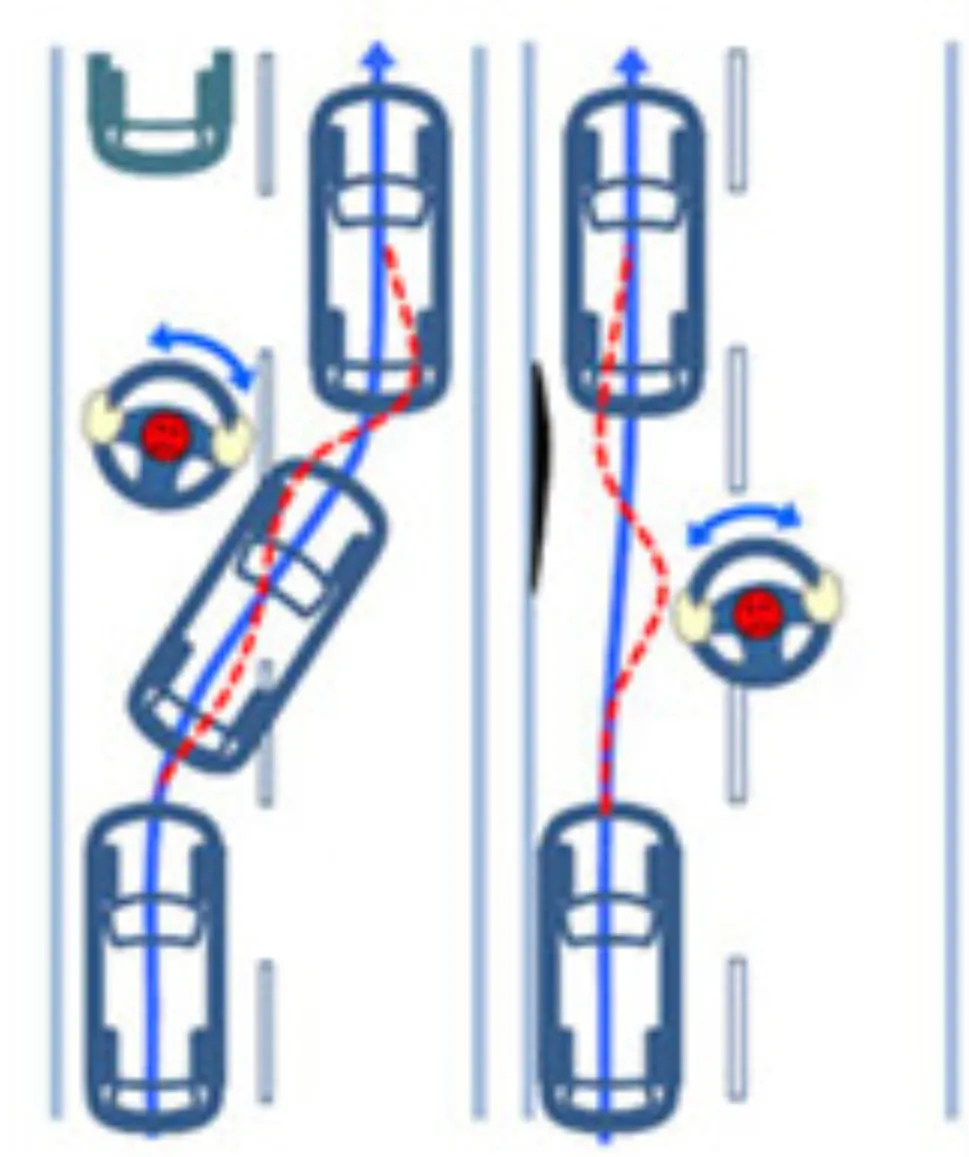
在上一篇《线控转向主动回正功能设计(篇一)物理原理与电机控制》中,我们剖析了主动回正的物理原理,主销后倾和内倾共同产生回正力矩,但低速时侧向力不足导致回正不够,高速时回正力矩过剩导致冲过中位形成超调振荡,倒挡时后倾拖距方向反转导致回正力骤降。
主动回正的目标,是当物理回正力不足时补足、过剩时抑制。
这些物理原理需要落地为具体的软件算法。
本篇一起来看软件层面的三个核心工程问题,系统如何判断驾驶员已经松手、回正力矩应该算多大、电机如何执行回正动作。
前一个问题决定了“何时做”,后两个问题决定了“做什么”。
1 核心算法框架总览
工程上,主动回正的控制策略可以根据控制目标的不同分为两大类。
一类是“位置对应力矩”的直接控制方法。
系统根据方向盘当前偏离中位的角度,查表得到一个目标回正力矩,电机按此力矩输出,方向盘便会产生回正趋势。
这种方法结构简单,但力矩与角度之间的对应关系是开环的,无法预测方向盘将以多快的速度回到中位。
另一类是目前行业内的主流方案,“位置对应目标回正速度,通过闭环控制跟踪这个速度”的方法。
基于转角信息的主动回正控制方法利用转向盘转矩和转速进行回正状态识别,以此为基础建立转角-转速双闭环回正补偿控制策略,仿真和实车验证已证明其有效性。
在SBW主动回正控制中,各车速下合适的回正转速难以确定,基于转速参考模型和滑模控制的主动回正方法有效解决了这一问题。
这正是本文将要展开的核心论述框架。
2 驾驶员意图识别与状态判断
线控转向系统需要基于扭矩传感器信号准确识别驾驶员的转向意图。
主动回正控制的难点首先不在于“怎么回”,而在于“什么时候回”。
系统必须能准确区分“驾驶员正在主动转向”“驾驶员已松手”“驾驶员重新接管”三种不同的操作意图,误判轻则手感诡异,重则人机对抗。
为了精准识别驾驶员意图,行业内已经发展出基于多传感器融合的实时判断机制。
工程上采用基于时间窗的主动回正状态判断机制,系统持续监测方向盘转角、方向盘转速和手力矩三个信号,在一个连续的时间窗内进行综合评判。
判断逻辑是,当驾驶员的手力矩低于预设阈值时,初步判断驾驶员可能已松手;
然后检查方向盘转角是否偏离中位(如果已经在中位附近,不需要回正);
再检查方向盘在回正力矩作用下是否已经产生了回正趋势(方向盘转速是否超过设定阈值)。
三项条件在时间窗内同时满足,状态机才进入主动回正状态。
清车智行(苏州)电子科技有限公司申请的“一种线控转向系统的主动回正逻辑设计方法”专利(公开号CN120096670A)为此提供了一套完整的工程化方案。
该方法通过采集驾驶员和车辆的状态信息,并进行决策处理,得到主动回正状态标志位。
若主动回正状态标志位为开启主动回正,则根据状态信息确定主动回正力矩,进而确定主动回正目标转矩,并对电机进行驱动控制,完成车辆转向。
通过实时监测车速和方向盘转向力矩,结合助力特性曲线和闭环模糊PID控制策略以及回正补偿模式,实现了在驾驶员释放方向盘后,方向盘能够自动且平稳地回正到中间位置。
状态识别是主动回正算法链的第一步,也是决定性的一步,它的准确性奠定了整个后续计算和控制过程的基础。
状态机的退出逻辑同样关键。
当驾驶员重新施加手力时,系统必须立即退出主动回正控制,回正力矩逐步撤销以保证手感平顺。
退出过程如果力矩突变,驾驶员的感受会是“方向盘突然轻了”或者“被拽了一下”,这在主观评价中是严重的扣分项。
当方向盘回到中位附近时,主动回正扭矩逐渐衰减,最终归零,由中位定位力矩接管,避免回正末段力矩过大导致冲过中位。
3 回正力矩计算与中位仲裁
状态机判定“应该回正”之后,下一个核心问题是回正力矩的大小。
回正力矩的计算逻辑需要解决三个关键问题,基础力矩从哪来、如何防止冲过中位形成超调、如何在不同车速下动态调整力矩量级。
3.1 基础力矩从哪来
基础力矩的确定采用“车速-转角”联合标定MAP表。
3.2 如何在不同车速下动态调整力矩量级
比亚迪股份有限公司申请的“车辆方向盘的主动回正控制方法、设备、介质和车辆”专利(公开号CN118220322A)给出了一个清晰的工程实现路径。
该方法首先获取方向盘转向角信息和车速信息,然后基于方向盘转向角信息和车速信息确定第一力矩。
第一力矩是基础回正力矩,方向盘偏离中位越远,第一力矩越大;车速越高,第一力矩越大。
3.3 如何防止冲过中位形成超调
直接使用第一力矩控制回正存在一个工程缺陷,方向盘越接近中位,回正力矩应该越小,但第一力矩仅根据车速和转角查表得到,可能在中位附近仍然保持较大的数值,导致回正末段冲过中位形成反复振荡。
中位仲裁系数正是为解决这一问题而引入的。
比亚迪专利进一步指出,基于方向盘转向角信息得到中位仲裁系数,再基于方向盘转向角信息、中位仲裁系数和第一力矩确定最终的主动回正力矩。
中位仲裁系数的核心逻辑是,方向盘越接近中位,仲裁系数越小,回正力矩越弱,这避免了“快到中位了还被猛推一把”的工程问题。
当方向盘偏离中位较远时,仲裁系数接近1,第一力矩全额输出;
当方向盘接近中位时,仲裁系数趋近于0,回正力矩快速衰减,让方向盘被摩擦力和残余的物理回正力矩自然“刹停”在中位。
这一方法的工程价值在于,它用“前馈控制”实现了回正的平顺性。
通过对前馈回正力矩进行仲裁,使得方向盘在回正更加平顺,更不容易发生超调和回正不足的情况,从而提高了回正效果和驾驶体验。
4 滑模控制与闭环跟踪
力矩计算解决了“回正力多大”的问题,但不解决“方向盘以多快速度回正”的问题。
在主动回正过程中,系统希望方向盘以期望的回正转速平滑回到中位,太快会导致超调,太慢则残余角过大。
基于回正转速参考模型和滑模控制的主动回正方法给出了一个完整的解决方案,根据轮胎回正力矩建立回正转速参考模型,设计滑模控制策略使方向盘转速跟踪这个参考转速。
回正转速参考模型本质上是一个“理想回正轨迹”。
它基于轮胎回正力矩随方向盘转角的非线性变化关系,计算出在各个方向盘角度下“最合理的回正转速”,在偏离中位较远时允许较快的回正转速,在接近中位时逐渐降低转速,在中位处恰好降为零。
这个参考模型使回正过程从“随它自己怎么回”变成了“按理想曲线回”。
方向盘的实际转速不可能完美跟随参考模型,因为回正力矩随温度、路况、轮胎磨损等因素实时变化,系统扰动是持续存在的。
滑模控制对参数不确定性和外界干扰的鲁棒性使其成为跟踪理想回正轨迹的合适算法。
其开关特性使系统在回正力矩随角度非线性变化的回正过程中,能持续修正跟踪偏差。
5 结语
主动回正有一条完整的软件逻辑链。
状态判断是整个链条的起点,基于时间窗的多信号融合机制在连续时间窗口内综合评判方向盘转角、转速和手力矩三个信号,准确区分“驾驶员正在转向”“已松手”“重新接管”三种意图,误判轻则手感诡异,重则人机对抗。
力矩计算是链条的中间环节,方向盘越接近中位,仲裁系数越小,回正力矩越弱,让方向盘被摩擦力和残余物理回正力矩自然“刹停”在中位。
闭环控制是链条的执行终点,基于回正转速参考模型和滑模控制的策略让方向盘按理想曲线回正,在偏离中位较远时允许较快转速,接近中位时逐渐降速,中位处恰好为零。
三阶段递进,准确判断驾驶员意图、合理计算回正力矩、精确控制回正速度,共同构成完整的主动回正软件方法论。