 夜雨聆风
夜雨聆风
上一篇我画了从传感器到电机的完整数据流。数据流过了一遍,模块位置都清楚了,但有一个模块我只是点了下名——EKF2。
这篇专门拆它。
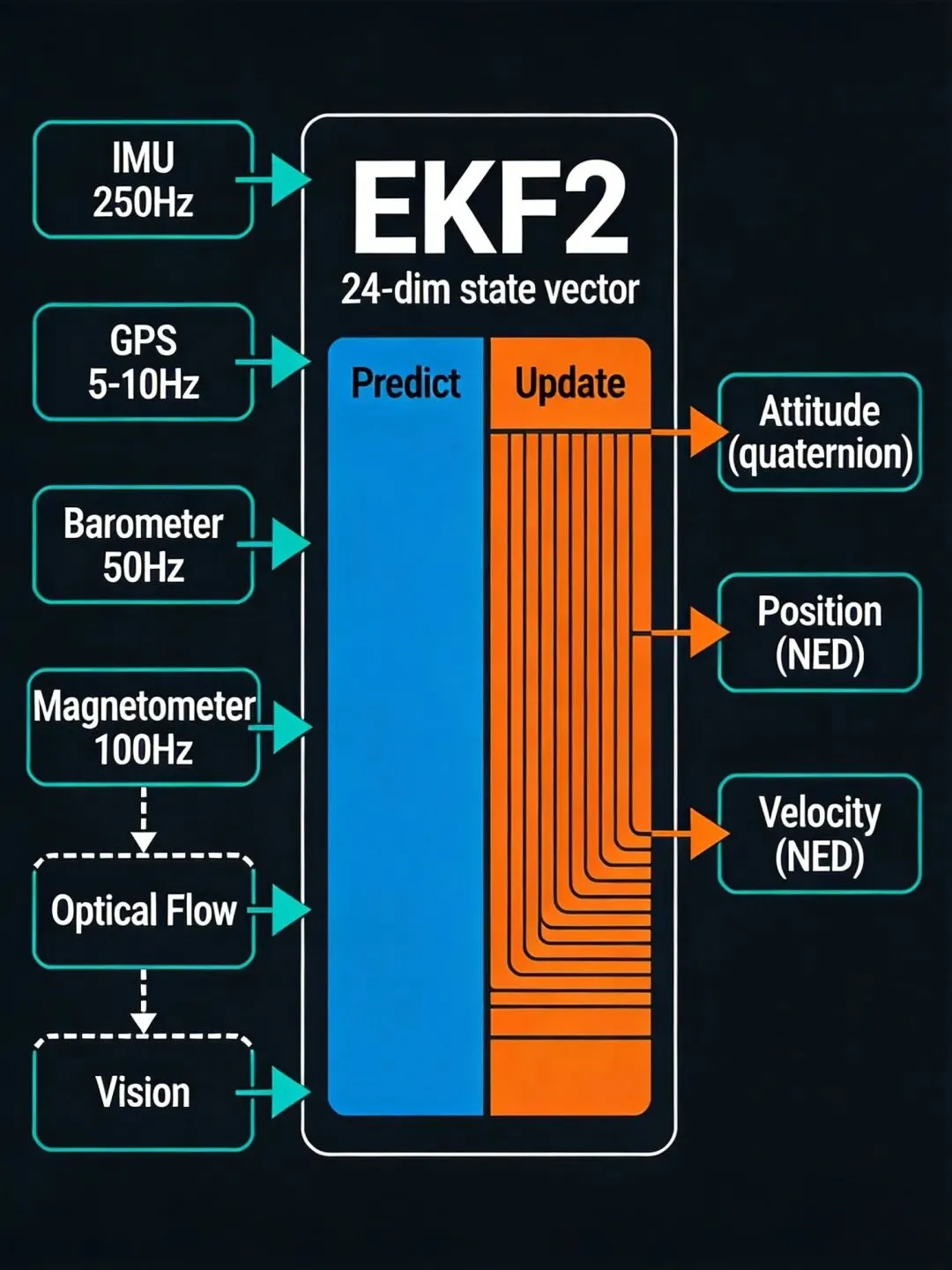
不是因为它最复杂(虽然确实最复杂),而是因为PX4里所有"智能"都集中在这一个模块。GPS定位靠它,气压计定高靠它,视觉定位靠它,地磁定向靠它。它错了,后面全错。而它要同时吃六个以上不同频率、不同精度的传感器,在毫秒级的时间里给出一个自洽的24维状态估计。
读懂EKF2,不是为了调参数,是为了知道它什么时候在骗你。
EKF2不是卡尔曼滤波
先纠正一个常见误解:EKF2不是"一个扩展卡尔曼滤波器"。
它是一个多观测源的扩展卡尔曼滤波框架。区别在于:经典EKF有一个预测步、一个更新步,测量矩阵H是固定的。EKF2有24个状态变量,但观测模型有七套——GPS一套、气压计一套、地磁计一套、光流一套、视觉定位一套、测距仪一套、空速一套。每套有自己的H矩阵和噪声模型,独立触发更新。
这意味着EKF2的每个主循环可能是这样的:
预测(IMU驱动,250Hz固定)
→ GPS更新(5-10Hz,有新数据时触发)
→ 气压计更新(50Hz,有新数据时触发)
→ 地磁计更新(100Hz,有新数据时触发)
→ 光流更新(可能有,可能没有)
→ 视觉定位更新(可能有,可能没有)
预测步永远跑,更新步按传感器到达频率各自独立触发。这就是为什么EKF2能同时处理频率差两个数量级的传感器——它不需要等所有传感器到齐才计算,每个传感器到了就更新一次。
这个设计的代价是:更新顺序影响结果。GPS先到和气压计先到,最终状态会差一点点。差异在噪声量级内,不会发散,但严格说结果不唯一。这是所有多观测源EKF的通病,不是PX4的bug。
24维状态向量
EKF2的状态向量是24维。不看代码的人以为是4维(四元数),实际上远不止:
状态索引 变量 维度 来源
0-3 四元数姿态 q 4 IMU预测
4-6 速度 vn,ve,vd 3 IMU预测 + GPS/光流/视觉更新
7-9 位置 pn,pe,pd 3 IMU预测 + GPS/视觉更新
10-12 陀螺仪偏差 δgx,δgy,δgz 3 在线估计
13-15 加速度计偏差 δax,δay,δaz 3 在线估计
16-18 地磁场 NED分量 3 地磁计更新
19-21 地磁场 body分量 3 地磁计更新
22 风速 north 1 GPS更新(多旋翼/固定翼)
23 风速 east 1 GPS更新
四元数4维 + 速度3维 + 位置3维 = 10维是核心运动状态。剩下14维全是偏差和外部量估计。
为什么要估计传感器偏差?因为MEMS IMU的零偏会随温度漂移。上电时陀螺仪偏差可能是0.01 rad/s,飞十分钟后变成0.03 rad/s。如果不在线估计偏差,累积误差会让姿态在几分钟内发散。
加速度计偏差更棘手——它和重力方向耦合。悬停时加速度计测量的是重力反方向(9.8 m/s²向上),偏差0.1 m/s²看起来很小,但被积分两次后就是位置漂移:0.5 × 0.1 × t²,10秒偏差5米。这就是为什么多旋翼纯惯导悬停漂移严重,不是算法差,是加速度计偏差在自由落体。
地磁场8维看起来浪费——为什么NED和body各3维,总共6维?因为EKF2同时估计地磁场在NED坐标的参考值和body坐标的偏差。前者是地磁场本身(缓变),后者是机载磁干扰(随机体动作变化)。分开估计才能在有磁干扰时还能用磁力计做航向修正——它知道哪些是地磁、哪些是干扰。
风速2维只在固定翼和多旋翼返航时有用。多旋翼的风速估计本质是"GPS速度减去期望悬停速度",精度不高但够用。
预测步:IMU驱动的24维传播
预测步是EKF2的心跳,250Hz,雷打不动。
// src/modules/ekf2/EKF/ekf.cpp
voidEkf::predictIMU(float dt)
{
// 1. 用陀螺仪积分姿态
const Vector3f delta_angle(gyro - _state.gyro_bias);
const Quaternionf dq = _state.quat * Quaternionf(delta_angle);
_state.quat = dq;
_state.quat.normalize();
// 2. 用加速度计积分速度和位置
const Vector3f delta_vel(acc - _state.accel_bias);
const Vector3f delta_vel_NED = _state.quat.rotate(delta_vel);
_state.vel += delta_vel_NED * dt + Vector3f(0, 0, GRAVITY) * dt;
_state.pos += _state.vel * dt;
// 3. 协方差传播
// F是24×24的状态转移雅可比矩阵
// P = F * P * F^T + Q
_P = _F * _P * _F.T() + _Q;
}
三件事:状态传播、误差传播、协方差传播。
状态传播是直觉能理解的——陀螺积分姿态,加速度积分速度再积分位置。但注意那个_state.quat * Quaternionf(delta_angle)——四元数乘法不是向量加法,delta_angle要先转成增量四元数再和当前姿态相乘。这一步的线性化误差就是EKF中"扩展"的代价。
协方差传播是整个EKF最昂贵的计算。P是24×24的对称矩阵,576个元素。一次传播需要两次24×24矩阵乘法和一次加法,在STM32H7上大约耗时200μs。这也是为什么EKF2的CPU占用经常排在第一——不是状态传播慢,是协方差传播慢。
Q矩阵(过程噪声)是调参的核心。陀螺仪的过程噪声设大了,EKF会更相信地磁计和GPS;设小了,会更相信IMU。PX4默认值是基于典型MEMS IMU标定的,换了一个更好的IMU(比如战术级),不改Q就浪费了精度;换了一个更差的,不改Q就会发散。
更新步:六套观测模型,六个入口
每个传感器有自己的更新函数。以GPS为例:
voidEkf::updateGps()
{
// 1. 计算创新(innovation):测量值减预测值
Vector3f innov_pos;
innov_pos(0) = _gps.pos - _state.pos(0);
innov_pos(1) = _gps.pos - _state.pos(1);
innov_pos(2) = _gps.pos - _state.pos(2);
// 2. 计算创新协方差
// S = H * P * H^T + R
// H是观测矩阵,R是测量噪声
Matrix3f S = _H_pos * _P * _H_pos.T() + _R_gps;
// 3. 创新一致性检验(卡方检验)
// 如果创新太大,说明预测和测量矛盾,拒绝本次更新
float innov_gate = 5.0f; // 5σ门限
if (innov_pos.norm() > innov_gate * sqrtf(S.trace())) {
return; // 拒绝
}
// 4. 计算卡尔曼增益
// K = P * H^T * S^{-1}
Matrix24x3f K = _P * _H_pos.T() * S.inverse();
// 5. 状态更新
// x = x + K * innovation
_state.vec += K * innov_pos;
// 6. 协方差更新
// P = (I - K * H) * P
_P = (_I - K * _H_pos) * _P;
}
六个步骤,每套观测模型都走同样的流程,只有H矩阵和R矩阵不同。
创新一致性检验是EKF2鲁棒性的关键。正常情况下,创新(测量减预测)应该服从零均值高斯分布,方差由S决定。如果创新远超预期(超过5σ),说明要么测量坏了,要么模型错了——不管哪种,都应该拒绝这次更新而不是强行融合。这就是为什么GPS被遮挡时PX4不会立刻飞走——大的创新被拒绝了,EKF退回到纯惯导预测。
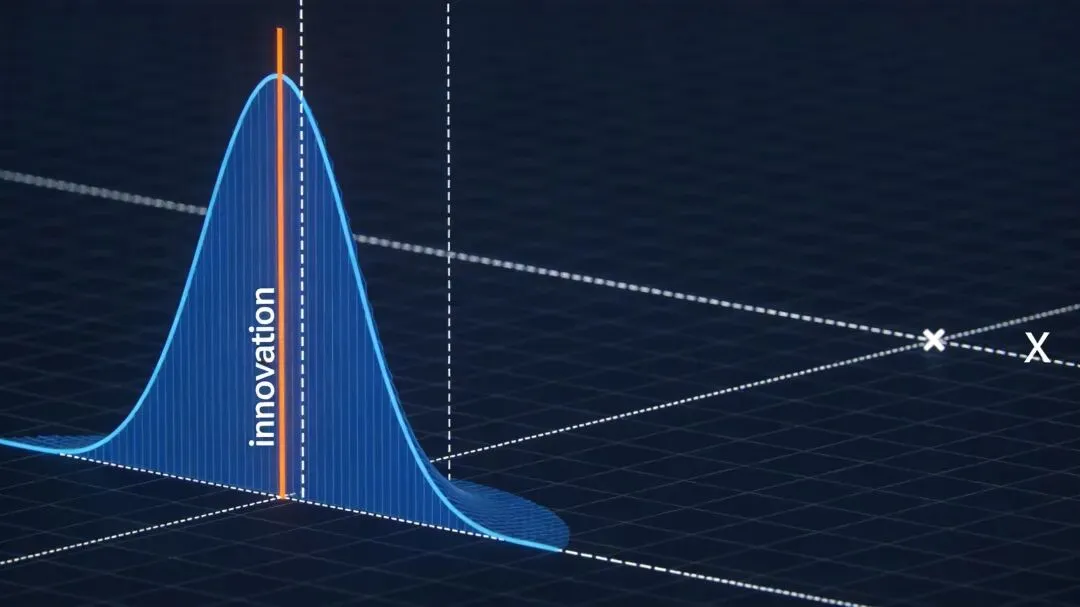
但这个机制有盲区:如果偏差缓慢积累,创新不会突然变大,而是持续偏移。卡方检验抓不住这种"温水煮青蛙"式的故障。这也是为什么长航时飞行在GPS信号边缘时容易出现静默漂移——不是EKF坏了,是它以为自己还好。
地磁计更新:最难搞的那个传感器
地磁计在EKF2里的处理比其他传感器复杂得多,因为它有三个独有的问题:
1. 磁干扰无处不在
电机电流、电调、电池线、碳纤维螺丝——飞机上一切带电流或铁磁性的东西都会干扰磁力计。干扰随油门变化,随姿态变化,基本不可能标定掉。
2. 地磁场倾角
在杭州(北纬30°),地磁场和水平面夹角约45°。这意味着水平分量只有总强度的70%。如果你只想用磁力计做航向(yaw),只有水平分量有用,剩下30%是噪声放大器。
3. 双参考系估计
这就是那8维地磁状态的来源。EKF2同时估计NED参考地磁和body偏差,用两者之差来分离真正的地磁场和机上干扰:
// 磁力计预测模型
// h_pred = R_to_body * mag_NED + mag_bias_body
Vector3f Ekf::predictMag()
{
const Vector3f mag_pred = _state.quat.rotate_inverse(_state.mag_NED)
+ _state.mag_bias;
return mag_pred;
}
_state.mag_NED是地磁场在地球坐标的向量(应该缓变),_state.mag_bias是机载干扰(随姿态变化)。通过持续观测差值,EKF2能在线分离两者。
但在强干扰环境下(比如靠近高压线),这个分离会崩溃——干扰太大,模型假设不成立。PX4的处理方式是:如果地磁创新连续被拒绝,自动降低地磁权重,最终完全放弃地磁修正,退回GPS航向。这就是为什么有些飞机在城区飞着飞着yaw突然跳了一下——EKF2刚完成了从磁力计航向到GPS航向的切换。
多IMU融合:sensor模块的投票制
EKF2不直接订阅原始IMU数据。中间隔了一个sensor模块,负责多IMU投票和优先级选择。
// src/modules/sensors/sensors.cpp
voidSensors::Run()
{
// 如果有多个陀螺仪,取优先级最高的
// 如果最高优先级数据超时,降级到下一个
int best_gyro = selectBestGyro();
// 融合策略:不是加权平均,是选优
_combined.gyro_rad[0] = _gyro[best_gyro].x;
_combined.gyro_rad[1] = _gyro[best_gyro].y;
_combined.gyro_rad[2] = _gyro[best_gyro].z;
}
选优而不是加权平均,这个设计是有意为之。两个IMU如果精度差一个量级(比如一个内部陀螺、一个外部MARG),加权平均反而会被差的拖累。选优保证了EKF2吃到的始终是最好的数据,代价是切换时有一个跳变。
这个跳变在EKF2里没有专门处理。如果你在飞的过程中一个IMU挂了,sensor模块切到备用IMU,EKF2会看到一个时间不连续的角速度跳变。短时间表现为姿态估计抖一下,长时间如果备用IMU偏差不同,陀螺仪偏差估计需要重新收敛。
这也是我之前做时间同步方案时关注的问题:多IMU系统里,时间戳对齐比数据融合更重要。两个800Hz的IMU,如果采样时刻差1ms,融合出来的角速度就有1ms的时序错位,积分后就是姿态误差。
协方差矩阵P的秘密
P矩阵是EKF2最占内存也最耗算力的数据结构。24×24 = 576个float,2.25KB。在STM32F4上这不是小数目——RAM总共才192KB,P矩阵吃掉1%。
但P矩阵也是EKF2最被低估的工具。很多人只关注状态向量,不看P的对角线。实际上P的对角线就是每个状态的不确定度。
P(7,7)= 北向位置的不确定度(方差)。如果GPS丢了5秒,这个值会指数增长。当它超过阈值时,Commander会触发位置失效保护。P(10,10)= 陀螺仪X轴偏差的不确定度。刚上电时很大(偏差未知),随着观测累积逐渐减小。如果飞机一直在地面不动,偏差不确定度收敛到最小——这就是为什么PX4建议上电后静置几秒。P(0,0)= 姿态四元数w分量的不确定度。如果地磁和GPS航向都不可用,这个值会持续增长,直到触发yaw失效保护。
读懂P的对角线,就知道EKF2"有多自信"。一个不自信的EKF不一定错,但一个过于自信的EKF一定危险。
PX4有个参数EKF2_POS_GATE控制位置创新门限(默认5σ),另一个EKF2_VEL_GATE控制速度创新门限。门限越大,EKF2越"宽容",越不容易拒绝测量;门限越小,越"多疑",越容易退回惯导。调这两个参数本质上在调EKF2的性格——信任传感器还是信任自己。
EKF2的运行时序:不是你想的那样
很多人以为EKF2是"先预测、再更新、然后输出"的线性流程。实际上EKF2的主循环是这样的:
voidEkf::update()
{
// 1. IMU预测(每次都执行)
predictIMU(_dt_imu);
// 2. 按优先级尝试各传感器更新
// 每个更新函数内部检查是否有新数据
if (_gps_data_ready) updateGps();
if (_baro_data_ready) updateBaro();
if (_mag_data_ready) updateMag();
if (_flow_data_ready) updateFlow();
if (_vision_data_ready) updateVision();
if (_range_data_ready) updateRange();
// 3. 更新各种衍生状态
// 这些不是EKF状态,是从EKF状态计算的
computeAirspeed();
computeWind();
computeOffset();
// 4. 发布结果
publishAttitude();
publishLocalPosition();
publishGlobalPosition();
}
关键点:更新顺序是固定的(GPS → 气压 → 磁力计 → 光流 → 视觉 → 测距),不是按数据到达时间排序的。这意味着即使磁力计数据比GPS先到,也会等GPS更新完再处理磁力计。
这个固定顺序是有意设计——GPS的位置更新会影响速度估计,而速度估计影响后续所有更新的创新计算。如果先更新磁力计再更新GPS,磁力计用的速度预测是旧的,创新偏大,可能被误拒绝。所以GPS优先级最高,确保速度估计最新。
但这也意味着低优先级传感器会被"拖慢"。如果你的飞机只有光流定位(没有GPS),光流的更新频率会受限于气压计和磁力计的处理时间。实际上这个影响很小(微秒级),但在高负载情况下可能体现出来。
一个真实的调试场景
我之前遇到过一个案例:多旋翼在室内悬停,EKF2频繁报"yaw fusion timeout"告警,然后自动切换到GPS航向——但室内没有GPS,于是yaw直接飘。
查代码后发现原因链:
室内磁干扰大 → 磁力计创新频繁超门限 → 磁力计更新被拒绝 连续N次拒绝后,EKF2判定磁力计不可靠 → 降低磁力计权重 权重降为零后,yaw没有观测源 → 不确定度P(3,3)持续增长 P(3,3)超过阈值 → 触发"yaw fusion timeout"告警 EKF2尝试切换到GPS航向 → 室内无GPS → 切换失败 yaw纯惯导漂移 → 飞机原地打转
解决方案不是调参数(门限调大了磁干扰会更严重),是在室内用外部视觉定位(MOCAP/VIO)提供yaw观测。EKF2本身已经支持——updateVision()里同时处理位置和姿态观测,只要视觉系统提供yaw,地磁计就可以完全关掉。
这个案例说明:EKF2的告警不是问题本身,是症状。 "yaw fusion timeout"不是EKF2坏了,是它在告诉你:我没有可用的yaw观测源了。读懂这个信号,才知道该从外部补什么。
读EKF2代码的建议
如果真要啃EKF2源码,我的建议是:
不要从ekf.cpp开始读。 那个文件5000多行,入口在中间,逻辑跳来跳去,第一次读一定迷路。
先读这三个文件:
ekf_derive.cpp— 所有预测步的雅可比矩阵推导。读懂这个文件,就知道F矩阵每个元素是怎么来的。EKF2的F矩阵不是数值差分算的,是手推的解析雅可比——精度高,但代码可读性差。mag_control.cpp— 地磁计融合的完整逻辑。这个文件展示了EKF2处理复杂传感器的方法:多假设、在线标定、失效检测。读懂这个,其他传感器的更新函数都是简化版。geo.cpp— 坐标转换工具集。EKF2内部同时使用NED、body、FRD三种坐标系,这个文件是翻译字典。
读懂这三个文件后,再回头读ekf.cpp,每个函数的上下文就清楚了。
小结
EKF2不是一个滤波器,是一个多观测源的融合框架。它的核心设计决策是:
预测步固定频率、更新步按需触发——解决多速率传感器融合 创新一致性检验——自动拒绝坏数据,但也抓不住慢漂移 双参考系地磁估计——在干扰中分离地磁和干扰,但强干扰下会崩溃 选优而非加权——多IMU选最好的用,切换时有跳变 P矩阵对角线是不确定度的实时光度——读懂它就知道EKF2的自知之明
最后一句话:EKF2的代码不漂亮,变量名很长,注释很少,到处是魔数。但它运行在几十万架飞机上,每天处理几十亿个传感器采样。可靠比漂亮重要。
代码基于PX4 v1.14,EKF2模块路径:src/modules/ekf2/EKF/
