夜雨聆风
夜雨聆风Artificial Intelligence Evolves from Digital Algorithms to Physical Embodiment
技术范式深度重构
人工智能从数字算法走向实体具身进化
九江豚海职云科技有限公司
人工智能产业迎来第三代技术变革
具身智能取代传统云端算法
突破莫拉维克悖论
实现从解读信息到改造现实的产业跃迁
人工智能产业正迎来第三代关键性技术变革,发展重心从依托静态数据的云端离身算法,转向能够在现实世界自主交互的具身智能,完成从 “看懂信息” 到 “改造物理世界” 的历史性跨越。相较于依托网络文本、图像做字符预测的传统互联网 AI,具身智能以环境实时交互为核心逻辑,重构感知、决策、执行全链路技术体系,破解长久困扰行业的莫拉维克悖论,开启实体人工智能产业化新阶段。

01
FUTURE
TECHNOLOGY
具身智能引领第三代 AI 落地物理世界
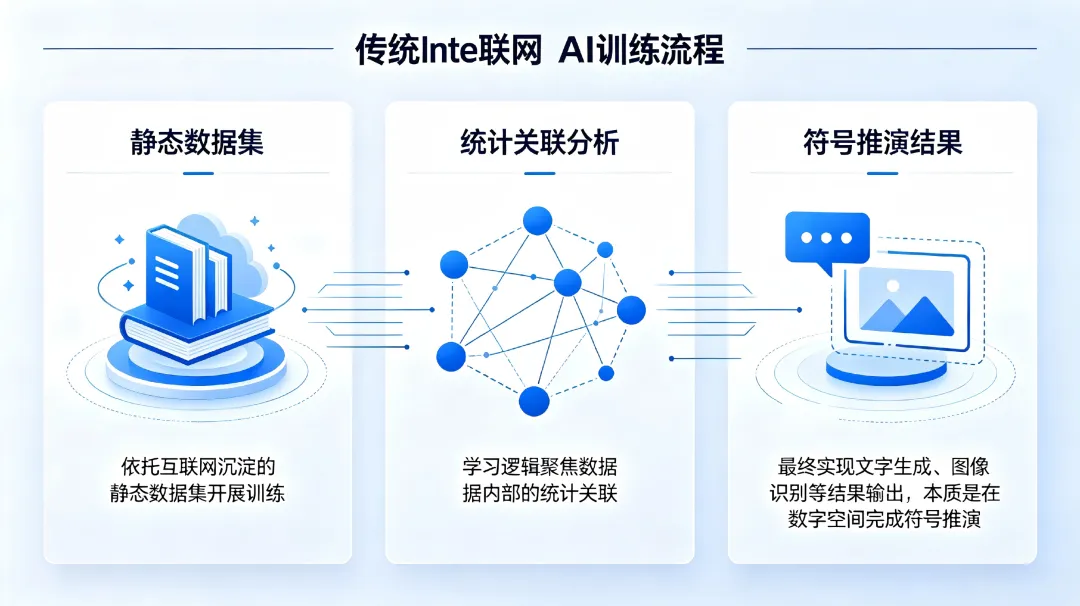
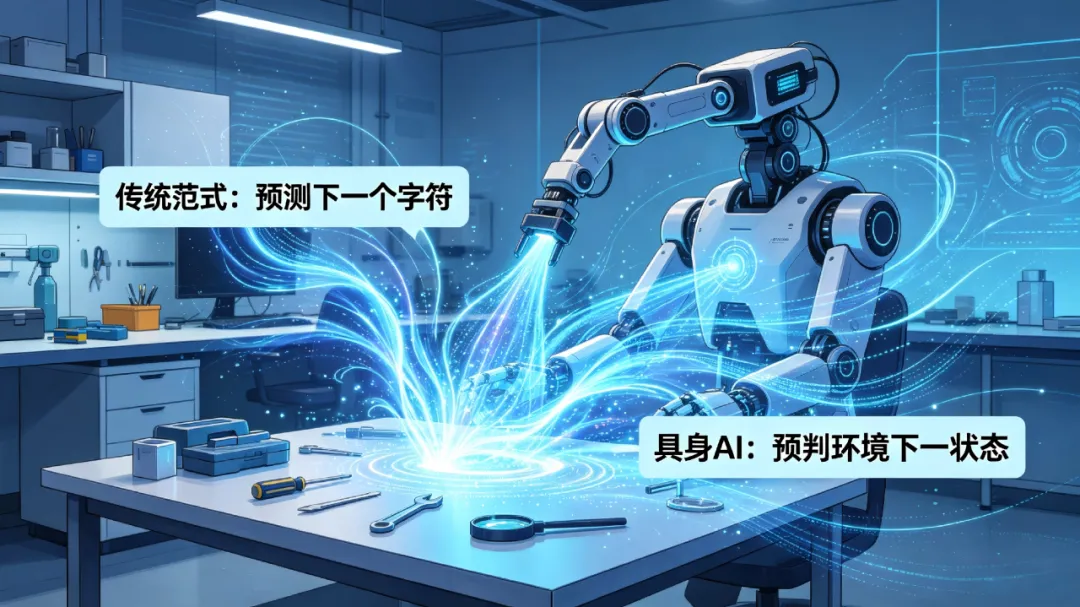
传统 Internet AI 依托互联网沉淀的静态数据集开展训练,学习逻辑聚焦数据内部的统计关联,最终实现文字生成、图像识别等结果输出,本质是在数字空间完成符号推演。这类智能脱离物理实体,无法感知重力、摩擦等客观物理规律,难以落地现实操作。而具身 AI 彻底颠覆这一范式,智能体搭载实体硬件,在和环境的实时互动中生成动态数据,研发目标由 “预测下一个字符” 升级为 “预判环境下一状态”。借助 VLA 视觉 - 语言 - 动作大模型与 Sim2Real 仿真迁移技术,行业打通虚拟仿真训练到真机落地的技术通路,攻克了人类与生俱来、机器难以复刻的感知运动难题,实现莫拉维克悖论的阶段性突破,成为第三代人工智能的标志性突破。
02
FUTURE
TECHNOLOGY
多模态全域感知赋能闭环体系
夯实具身智能落地根基
完整的感知、决策、执行闭环架构,构筑起具身智能落地的技术基石。多模态融合感知作为智能的 “五官”,打破单一传感器的能力局限,整合可见光相机、深度相机、激光雷达、触觉阵列、拾音设备及本体姿态传感器,同步采集环境纹理、空间距离、接触受力、声源方位、机体姿态等多维信息。通过时空配准与数据融合算法,完成场景三维重建与语义解析,有效化解物体遮挡、光线突变、环境杂乱等识别痛点,为上层决策提供全方位环境依据。

03
FUTURE
TECHNOLOGY
算法赋能决策系统
破除程式束缚实现智能自主规划
决策系统充当具身智能的 “大脑中枢”,以马尔可夫决策过程、强化学习为底层理论,依托 VLA 具身大模型实现自然语言指令向具象动作的跨模态转化。面对多变的非结构化场景,搭配 MPC 模型预测控制、遗传算法、粒子群优化等智能算法,滚动优化任务路径,动态调整行动策略,让机器人在多目标、多干扰条件下实现自主规划、自主应变,摆脱固定编程束缚。

04
FUTURE
TECHNOLOGY
算法赋能决策系统
破除程式束缚实现智能自主规划
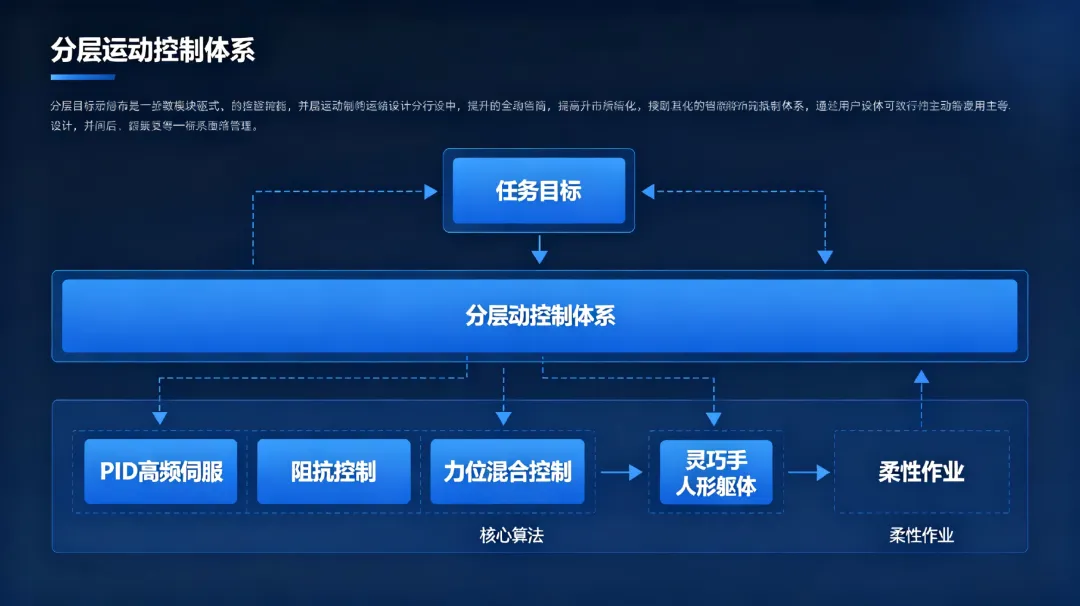
执行系统对标生物 “小脑” 调控逻辑,形成分层运动控制体系。高层接收决策下发的任务目标,底层依靠 PID 高频伺服、阻抗控制、力位混合控制等核心算法,驱动灵巧手、人形躯体完成柔性作业。不同于传统刚性机械臂,柔顺控制方案可实时根据接触反馈调整夹持力度与运动轨迹,从容应对异形物料抓取、动态障碍物避让等难题,补齐实体机器人落地实操的最后一环。
从虚拟符号计算到实体物理交互,具身智能的技术重构重塑了人工智能的发展边界。随着感知精度持续迭代、决策模型不断优化、底层运动控制日趋成熟,这套闭环技术体系持续赋能工业、特种、家用等多元场景,推动人工智能真正走出实验室,成为落地实体经济的新质技术引擎。