夜雨聆风
夜雨聆风
当Figure AI在2026年初公布其“一体化无外壳致动器架构”专利,并反复强调“以AI需求倒推硬件架构”时,一个清晰的信号已经发出:人形机器人的竞争,正从“外形模仿”的初级阶段,跃迁至“结构逻辑仿生”的系统工程深水区。硬件,不再是算法的被动载体,而是决定AI能力上限的“物理操作系统”。
01.
趋势洞察:
被AI重新定义的硬件架构
Figure AI的目标是让机器人成为“AI进入物理世界的入口”。这意味着,机器人不再是听从预设指令的工业工具,而是能够高动态响应、实时学习、自主决策的智能体。
要支撑这样的智能体,传统“电机+减速器+编码器+驱动器”各自为政的积木式架构已难以为继。分散的线缆、额外的外壳、冗余的转接件,不仅带来可靠性与体积的代价,更在毫秒级控制中引入了不可控的延迟与耦合。
行业的共识正在形成:关节必须从“部件组合”进化为“功能系统”。 星际求索的一体化设计,正是对这一趋势的工程化落地。
02.
痛点拆解:
传统关节何以成为具身智能“枷锁”?
在AI对高动态响应与紧凑空间提出极致要求的今天,传统机器人关节的三大弊端日益凸显:
电机外挂,线缆杂乱:各组件通过连接件和线缆拼装,整机布线复杂,信号干扰与故障点增多;
体积庞大,质量冗余:多部件分立组装,难以实现人形机器人所需的高动态响应和紧凑型仿生构型。
动态响应受限:分散架构的通信与控制耦合,难以满足AI对高精度关节控制的需求。
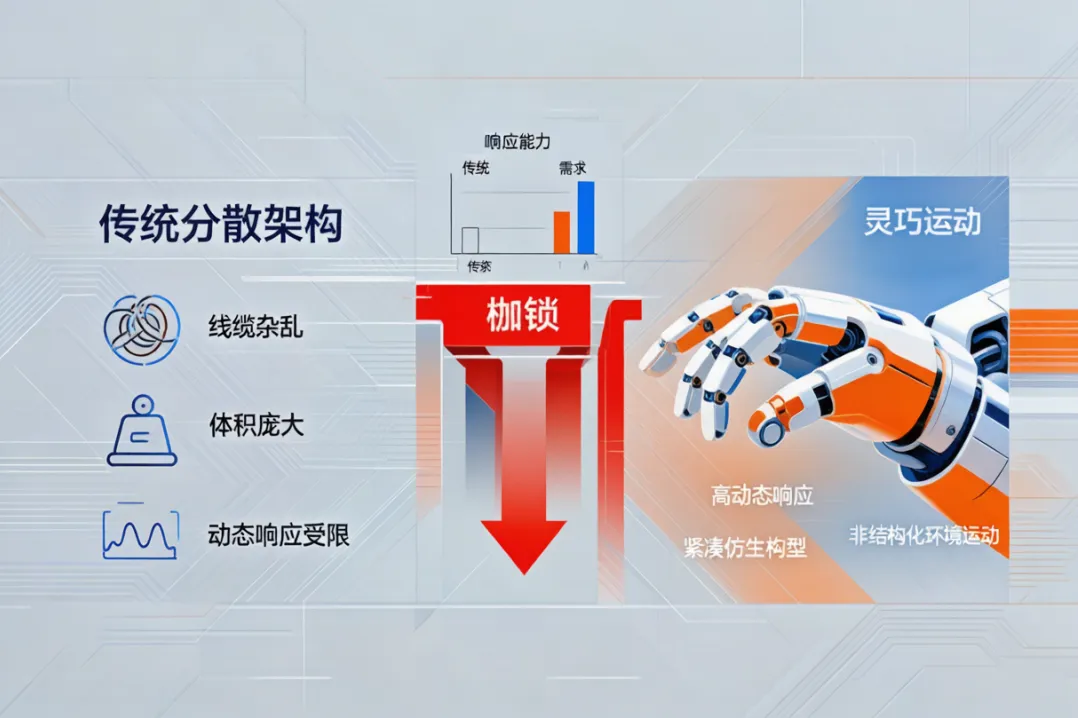
这些“枷锁”使得机器人难以像人类一样,在复杂非结构化环境中实现灵巧、柔顺且高效的运动。
03.
产品实践:
星际求索一体化关节模组矩阵
直面上述痛点,星际求索推出了直线+旋转一体化关节模组解决方案,从底层设计上消除上述弊端。
旋转关节模组:以摆线方案为核心产品,形成从90Nm到255Nm的额定扭矩矩阵,具备高刚度、抗冲击、输出扭矩密度大特性,适用于髋部、膝部等需要承受大动态负载的关节。此外,支持谐波减速器方案等定制开发,满足上肢手腕、肩肘等对轻量化和零背隙有特殊要求的场景。全系灵活匹配各类旋转执行需求。
直线关节模组:采用“电机+行星滚柱丝杠”一体化设计,实现更低成本、更高负载密度、更长使用寿命。模组覆盖从500N到8500N的强劲推力阶梯,适配轻载手臂至重载下肢等不同场景,为整机提供高度集成、快速部署直线运动单元。

星际求索的模组矩阵,核心价值在于将机器人开发中复杂且最底层的运动执行单元,标准化、模块化。整机厂商可根据性能需求自由选配,快速构建,将研发重心转向更有价值的整机设计与算法开发。


人形机器人的终局,不是单点技术的炫技,而是谁能将复杂的机械系统、感知系统与AI系统深度融合,跑通、跑稳、跑成可靠的生产力。星际求索从核心运动单元深耕,回应AI时代对硬件提出的新命题。当硬件开始像软件一样思考,机器人的“身体”才能真正跟上“大脑”进化的速度。
<<< END >>>