 夜雨聆风
夜雨聆风导言
前一篇主要看的是 CanNm 的目录结构和模块边界。真正理解 CanNm,不能只看它有哪些 API,还要顺着一帧 NM 报文在源码里的生命周期往下走:
1. NM 报文是如何被接收的? 2. 收到的 NM 报文如何参与 CanNm_MainFunction中的状态切换?3. NM 报文又是如何被发出去的?
这三个问题串起来,其实就是 CanNm 的主干逻辑:下层 CanIf 把收到的 NM PDU 通知给 CanNm;CanNm 把接收结果先存入 RAM;周期调度函数 CanNm_MainFunction 再统一消费这些标志和缓存,驱动定时器、状态机和发送逻辑。
本文基于当前工程中的 NM/NM/CanNm 源码分析,重点文件包括:
CanNm_RxIndication.cCanNm.cCanNm_Inl.hCanNm_StartTransmission.cCanNm_TxConfirmation.cCanNm_Transmit.cCanNm_Init.cCanNm_Prv.hCanNm_PBcfg.c1. 先看 CanNm 的运行模型
在这套源码中,CanNm 并不是“收到一帧报文就立刻切状态”的写法。
它采用的是典型 AUTOSAR BSW 周期调度模型:

这种设计的好处是:中断或下层回调路径尽量短,只做数据搬运和事件置位;复杂的状态机逻辑放到周期任务里处理,便于控制运行时间和并发一致性。
在 CanNm_RamType 中可以看到 CanNm 维护的关键运行时变量:
PduInfoType Pdu_s;CanNm_TimerType MsgCyclePeriod;CanNm_TimerType PrevMsgCycleTimestamp;CanNm_TimerType PrevMsgTimeoutTimestamp;CanNm_TimerType ctRepeatMessageTimer;CanNm_TimerType ctNMTimeoutTimer;CanNm_TimerType ctWaitBusSleepTimer;CanNm_TimerType ctRemoteSleepIndTimer;uint8 RxBuffer_au8[CANNM_PDU_LENGTH_MAX];uint8 TxBuffer_au8[CANNM_PDU_LENGTH_MAX];Nm_StateType State_en;CanNm_NetworkStateType NetworkReqState_en;Nm_ModeType Mode_en;uint8 RxNodeId_u8;uint8 RxCtrlBitVector_u8;uint8 TxCtrlBitVector_u8;boolean MsgTxStatus_b;boolean RxIndication_b;boolean TxConfirmation_b;boolean RxStatus_b;这里需要先记住几个变量:
• RxBuffer_au8:最近收到的一帧 NM PDU 数据。• RxNodeId_u8:从 NM 报文里解析出来的 Node ID。• RxCtrlBitVector_u8:从 NM 报文里解析出来的 Control Bit Vector,也就是 CBV。• RxIndication_b:本周期是否收到 NM 报文的事件标志。• RxStatus_b:当前 NM sleep cycle 中是否已经收到过 NM 报文,供GetUserData、GetPduData、GetNodeIdentifier等 API 判断数据是否有效。• MsgTxStatus_b:是否允许周期发送 NM PDU。• TxConfirmation_b:是否收到过发送确认。
2. NM 报文是如何被接收的
NM 报文的接收入口是:
void CanNm_RxIndication(PduIdType RxPduId, const PduInfoType * PduInfoPtr)这个函数是 CanNm 暴露给下层 CanIf 的回调。当 CAN NM I-PDU 被接收后,CanIf 会调用它,把 RxPduId 和 PduInfoPtr 传进来。
2.1 接收入口先做防御性检查
CanNm_RxIndication 前半段先做几类检查:
• 如果是 Post-Build Selectable 配置,会先通过 Channel_Mapping_Table把RxPduId映射成内部 channel。• 检查 RxPduId是否越界。• 检查 CanNm 是否初始化。 • 检查 PduInfoPtr和SduDataPtr是否为空。
这些检查完成后,函数拿到两个核心指针:
RamPtr_ps = &CanNm_RamData_s[RxPduId];ConfigPtr_pcs = CANNM_GET_CHANNEL_CONFIG(RxPduId);也就是说,后面的处理都是围绕“当前收到报文所属 channel 的配置”和“当前 channel 的 RAM 状态”进行。
2.2 如果开启 PN,会先做 PN 过滤
当前源码支持 Partial Network 相关逻辑。如果 CANNM_GLOBAL_PN_SUPPORT 打开,CanNm_RxIndication 不会无条件处理所有 NM 报文,而是先看 PN 信息。
它主要做三件事:
1. 从 CBV 中读取 PNI bit。 2. 用 PnFilterMask_pcu8对收到的 PN info 做掩码过滤。3. 根据 AllNmMessagesKeepAwake、PN message filtering 状态、PNI bit 和过滤结果决定ProcessPdu_b是否为TRUE。
如果过滤后发现这帧 NM PDU 与本 ECU 无关,CanNm_ProcessRxPdu() 就不会被调用。换句话说,报文虽然物理上收到了,但不会参与后续状态机的接收事件处理。
如果 PN 没开启,源码会直接走:
CanNm_ProcessRxPdu(ConfigPtr_pcs, RamPtr_ps, PduInfoPtr);2.3 真正保存报文的是 CanNm_ProcessRxPdu
CanNm_ProcessRxPdu() 是接收路径最核心的函数。
它做的事情很明确:
第一步,如果配置了 Node ID 位置,就从报文中取出 Node ID:
RamPtr_ps->RxNodeId_u8 = PduInfoPtr->SduDataPtr[ConfigPtr_pcs->NodeIdPos_u8];第二步,如果配置了 Control Bit Vector 位置,就从报文中取出 CBV:
RamPtr_ps->RxCtrlBitVector_u8 = PduInfoPtr->SduDataPtr[ConfigPtr_pcs->ControlBitVectorPos_u8];第三步,把整帧 NM PDU 复制到 RxBuffer_au8:
CanNm_CopyBuffer(SduPtr, RamPtr_ps->RxBuffer_au8, ConfigPtr_pcs->PduLength_u8);这个复制动作被 SchM_Enter_CanNm_RxIndicationNoNest() 和 SchM_Exit_CanNm_RxIndicationNoNest() 包住,说明源码考虑了接收回调和周期任务之间的数据一致性,一般可以加入Rx中断屏蔽(别去屏蔽所有中断,影响实时性)。
第四步,置位两个关键标志:
RamPtr_ps->RxIndication_b = TRUE;RamPtr_ps->RxStatus_b = TRUE;这两个变量很容易混淆:
• RxIndication_b是给下一次CanNm_MainFunction消费的一次性事件标志。MainFunction 读取后会清掉。• RxStatus_b表示当前 sleep cycle 中已经收过 NM 报文。它不会在 MainFunction 中立刻清掉,而是在进入 Bus Sleep 时清掉。
最后,如果开启 CANNM_PDU_RX_INDICATION_ENABLED,CanNm 会继续通知 Nm Interface:
Nm_PduRxIndication(ConfigPtr_pcs->NetworkHandle);所以,接收路径可以总结成一句话:
CanNm_RxIndication不直接推动状态机,它只负责过滤、解析、缓存和置位。真正的状态处理留给CanNm_MainFunction。
3. NM 报文如何参与 CanNm_MainFunction 状态切换
CanNm_MainFunction() 是 CanNm 的周期调度入口。
它先判断模块是否初始化,然后遍历所有配置的 channel:
for(CanNm_NetworkHandle = 0; CanNm_NetworkHandle < CANNM_NUMBER_OF_CHANNELS_CONFIGURED(); CanNm_NetworkHandle++){ CanNm_InternalMainProcess(CanNm_NetworkHandle);}真正的状态机处理在 CanNm_InternalMainProcess()。
3.1 MainFunction 先消费 RxIndication_b
进入 CanNm_InternalMainProcess() 后,源码先取配置和 RAM:
ConfigPtr_pcs = CANNM_GET_CHANNEL_CONFIG(CanNm_NetworkHandle);RamPtr_ps = &CanNm_RamData_s[CanNm_NetworkHandle];然后更新软件自由运行计时器:
CanNm_ComputeSwFrTimer(RamPtr_ps);接着进入临界区,读取并清除事件标志:
PduRxInd_b = RamPtr_ps->RxIndication_b;RamPtr_ps->RxIndication_b = FALSE;PduTxConfirmation_b = RamPtr_ps->TxConfirmation_b;RamPtr_ps->TxConfirmation_b = FALSE;CtrlBitVector_u8 = RamPtr_ps->RxCtrlBitVector_u8;RamPtr_ps->RxCtrlBitVector_u8 = (RamPtr_ps->RxCtrlBitVector_u8 & CANNM_RESET_CONTROL_BIT_VECTOR_MASK);这里有一个关键点:RxIndication_b 被读取后马上清掉,所以它是典型的 edge/event 语义。一次接收,只影响一次 MainFunction 调度周期。
而 CtrlBitVector_u8 会被保存成本地变量,后面 Ready Sleep、Normal Operation 等状态会用它判断对端是否请求 Repeat Message、Coordinator Sleep Ready 等。
3.2 Network Mode 下,收到报文先刷新定时器
如果当前 mode 是 NM_MODE_NETWORK,MainFunction 会先调用:
StateCopy_e = CanNm_NetworkModeProcessing(..., RamPtr_ps, PduRxInd_b, PduTxConfirmation_b);这个函数是“Network Mode 公共处理”。只要本周期有 NM 报文接收,即 PduRxInd_b != FALSE,就会做几件重要的事。
第一,重启 NM Timeout Timer:
CanNm_StartTimer(RamPtr_ps->ctNMTimeoutTimer);这就是 NM 报文维持网络活跃的核心机制。只要周期性收到 NM 报文,ctNMTimeoutTimer 就会不断被刷新,节点不会因为 NM Timeout 进入睡眠流程。
第二,如果开启 Remote Sleep Indication,会重启 Remote Sleep 定时器:
CanNm_StartTimer(RamPtr_ps->ctRemoteSleepIndTimer);如果当前状态是 NORMAL_OPERATION 或 READY_SLEEP,还会取消之前已经上报的 Remote Sleep:
CanNm_CancelRemoteSleepInd(ConfigPtr_pcs, RamPtr_ps);第三,如果开启 Bus Load Reduction,并且当前处于 Normal Operation,收到 NM 报文会把发送周期切到 MsgReducedTime:
RamPtr_ps->MsgCyclePeriod = ConfigPtr_pcs->MsgReducedTime;CanNm_StartTimer(RamPtr_ps->PrevMsgCycleTimestamp);CanNm_StartTimer(RamPtr_ps->PrevMsgTimeoutTimestamp);这说明接收报文不仅影响“是否睡眠”,还可能影响本节点自己的发送节奏。
3.3 Bus Sleep 状态收到 NM 报文
状态机 switch 中,NM_STATE_BUS_SLEEP 对应:
CanNm_CaseBusSleep(..., PduRxInd_b);如果主动网络请求已经存在,节点会进入 Network Mode;如果没有主动请求,但在 Bus Sleep 中收到了 NM 报文,则源码会通知上层网络启动:
Nm_NetworkStartIndication(nmChannelHandle);Det_ReportRuntimeError(..., CANNM_E_NET_START_IND);这里的语义是:本节点还在 Bus Sleep,却看到网络上出现 NM 报文,说明网络被其他节点唤醒了。CanNm 不在这里直接切到 Network Mode,而是把 network start 事件报给 Nm。
3.4 Prepare Bus Sleep 状态收到 NM 报文
NM_STATE_PREPARE_BUS_SLEEP 对应:
CanNm_CasePrepareBusSleep(CanNm_NetworkHandle, ConfigPtr_pcs, RamPtr_ps, PduRxInd_b);这个状态本来是从 Network Mode 退向 Bus Sleep 的中间态。如果在这个阶段又收到了 NM 报文:
if (PduRxInd_b != FALSE){ CanNm_GotoNetworkMode(CanNm_NetworkHandle, NM_STATE_PREPARE_BUS_SLEEP, ConfigPtr_pcs, RamPtr_ps);}也就是说,只要总线上还有 NM 报文活动,节点就不会继续睡下去,而是重新回到 Network Mode。
CanNm_GotoNetworkMode() 会做几件固定动作:
• 调用 CanNm_ChangeState()切到NM_STATE_REPEAT_MESSAGE和NM_MODE_NETWORK。• 通知 Nm: Nm_NetworkMode()。• 启动 Repeat Message Timer。 • 启动 NM Timeout Timer。 • 主动节点下调用 CanNm_StartTransmission()开始发送 NM 报文。
3.5 Ready Sleep 状态如何使用收到的 CBV
NM_STATE_READY_SLEEP 对应:
CanNm_CaseReadySleep(..., CtrlBitVector_u8);这里不直接看 PduRxInd_b,而是看刚才从接收报文里取出来的 CtrlBitVector_u8。
源码会读取 Repeat Message bit:
stRepeatMessage_u8 = (CtrlBitVector_u8 & CANNM_READ_RPTMSG_MASK);如果配置开启 Node Detection,并且收到的 CBV 中 Repeat Message bit 为 1,或者本地有 TxRptMsgStatus_b 请求,就进入 Repeat Message:
CanNm_GotoRepeatMessage(CanNm_NetworkHandle, NM_STATE_READY_SLEEP, ConfigPtr_pcs, RamPtr_ps);如果没有 Repeat Message 请求,则检查 NM Timeout:
if (CanNm_TimerExpired(tiNMTimeoutTimer, ConfigPtr_pcs->NMTimeoutTime) != FALSE){ CanNm_GotoPrepareBusSleep(ConfigPtr_pcs, RamPtr_ps);}这里就能看出收到 NM 报文对 Ready Sleep 的影响:
• 收到普通 NM 报文时,前面的 CanNm_NetworkModeProcessing()会刷新ctNMTimeoutTimer,所以 Ready Sleep 不会超时进入 Prepare Bus Sleep。• 如果收到带 Repeat Message bit 的 NM 报文,则 Ready Sleep 会被拉回 Repeat Message。
3.6 Normal Operation 状态如何使用收到的 CBV
NM_STATE_NORMAL_OPERATION 对应:
CanNm_CaseNormalOperation(..., CtrlBitVector_u8);Normal Operation 也会读取 CBV 中的 Repeat Message bit:
stRepeatMessage_u8 = (CtrlBitVector_u8 & CANNM_READ_RPTMSG_MASK);如果对端请求 Repeat Message,或者本地请求 Repeat Message,状态机会进入 Repeat Message:
CanNm_GotoRepeatMessage(CanNm_NetworkHandle, NM_STATE_NORMAL_OPERATION, ConfigPtr_pcs, RamPtr_ps);如果没有 Repeat Message 请求,但本地网络已经 release:
if (stNetworkState_e == CANNM_NETWORK_RELEASED_E){ CanNm_NormalOperationToRS(ConfigPtr_pcs, RamPtr_ps); CanNm_StartTimer(RamPtr_ps->ctNMTimeoutTimer);}则从 Normal Operation 进入 Ready Sleep,并停止发送:
RamPtr_ps->MsgTxStatus_b = FALSE;所以在 Normal Operation 中,收到的 NM 报文主要通过两个路径影响状态机:
1. 通过 PduRxInd_b刷新 NM Timeout Timer,维持网络模式。2. 通过 CBV 中的 Repeat Message bit,把状态拉回 Repeat Message。
3.7 Repeat Message 状态里的报文影响
NM_STATE_REPEAT_MESSAGE 对应:
CanNm_CaseRepeatMessage(ConfigPtr_pcs, RamPtr_ps);这个状态本身不直接读取 CtrlBitVector_u8,但收到 NM 报文仍然会在前面的 CanNm_NetworkModeProcessing() 中刷新 NM Timeout Timer。
Repeat Message 状态主要看 ctRepeatMessageTimer 是否到期:
if (CanNm_TimerExpired(RamPtr_ps->ctRepeatMessageTimer, RepeatMsgTime) != FALSE){ if (stNetworkState_e == CANNM_NETWORK_RELEASED_E) { CanNm_RepeatMessageToRS(ConfigPtr_pcs, RamPtr_ps); } else { CanNm_RepeatMessageToNO(ConfigPtr_pcs, RamPtr_ps); }}也就是说,Repeat Message 是一个由定时器控制的暂态:
• 如果本地网络已释放,超时后进入 Ready Sleep。 • 如果本地网络仍请求,超时后进入 Normal Operation。
4. NM 报文是如何发出的
接收路径讲完后,再看发送路径。
发送路径可以分成三类:
1. 状态机驱动的周期发送。 2. 上层触发的额外发送。 3. 特殊 API 触发的立即发送,例如 Bus Synchronization、Sleep Ready Bit 等。
本文重点看主路径:状态机驱动的周期发送。
4.1 初始化时准备 Tx PDU
在 CanNm_Init() 中,每个 active channel 初始化时会把 Pdu_s 指向 RAM 里的发送缓冲区:
RamPtr_ps->Pdu_s.SduDataPtr = &(RamPtr_ps->TxBuffer_au8[0]);RamPtr_ps->Pdu_s.SduLength = ConfigPtr_pcs->PduLength_u8;后面 CanIf_Transmit() 发送的就是这个 Pdu_s。
初始化时还会预填 Node ID:
RamPtr_ps->TxBuffer_au8[ConfigPtr_pcs->NodeIdPos_u8] = ConfigPtr_pcs->NodeId_u8;并初始化 CBV 和 User Data:
RamPtr_ps->TxBuffer_au8[ConfigPtr_pcs->ControlBitVectorPos_u8] = 0x00;RamPtr_ps->UserDataBuffer_au8[Index_ui] = CANNM_DEFAULT_USER_BYTE;CanNm_PBcfg.c 中的 channel 配置会决定发送周期、超时阈值、PDU 映射、报文长度、Node ID 位置、CBV 位置和 UserData 长度。
MsgCycleTime = <周期 NM 报文发送周期>MsgCycleOffset = <首次发送偏移>MsgTimeoutTime = <发送确认超时>ImmediateNmCycleTime = <Immediate NM 发送周期>NMTimeoutTime = <NM Timeout 时间>RepeatMessageTime = <Repeat Message 状态保持时间>WaitBusSleepTime = <Prepare Bus Sleep 等待时间>TxPduId = <CanIf Tx PDU 映射>PduLength = <NM PDU 长度>NodeIdPos = <Node ID 字节位置>ControlBitVectorPos = <CBV 字节位置>NodeId = <本节点 NM Node ID>UserDataLength = <UserData 长度>ImmediateNmTransmissions = <Immediate NM 发送次数>所以,一帧 NM 报文的布局不是在发送逻辑里写死的,而是由配置决定。典型结构可以抽象为:
<Node ID 字段,位置由 NodeIdPos 决定><Control Bit Vector 字段,位置由 ControlBitVectorPos 决定><User Data 字段,长度由 UserDataLength 决定>4.2 进入 Network Mode 时启动发送
发送不是一直打开的。状态机进入 Network Mode 或 Repeat Message 时,会调用:
CanNm_StartTransmission(CanNm_NetworkHandle);这个函数并不立刻发送报文,而是设置发送状态和周期参数:
RamPtr_ps->MsgTxStatus_b = TRUE;RamPtr_ps->TxConfirmation_b = FALSE;if(RamPtr_ps->ImmediateNmTx_u8 == 0){ RamPtr_ps->MsgCyclePeriod = ConfigPtr_pcs->MsgCycleOffset;}else{ RamPtr_ps->MsgCyclePeriod = 0;}RamPtr_ps->PrevMsgCycleTimestamp = RamPtr_ps->ctSwFrTimer;这里的 MsgTxStatus_b = TRUE 是周期发送的开关。
如果没有 Immediate NM PDU,第一次发送会等 MsgCycleOffset。这个偏移值来自项目配置;不同工程可能选择立即发送,也可能通过 offset 错开各节点的 NM 报文。
4.3 MainFunctionTx 周期检查是否该发送
CanNm_InternalMainProcess() 在状态机处理结束后,会调用:
CanNm_MainFunctionTx(CanNm_NetworkHandle);CanNm_MainFunctionTx() 中,周期发送条件是:
if((RamPtr_ps->stCanNmComm != FALSE) && (RamPtr_ps->MsgTxStatus_b != FALSE) && (CanNm_TimerExpired(RamPtr_ps->PrevMsgCycleTimestamp, RamPtr_ps->MsgCyclePeriod) != FALSE)){ CanNm_UpdateTxPdu(ConfigPtr_pcs, RamPtr_ps); RetValOfFuncs_ui = CanNm_MessageTransmit(ConfigPtr_pcs, RamPtr_ps);}也就是说,CanNm 发一帧 NM PDU 需要三个条件:
• 通信允许: stCanNmComm != FALSE。• 发送开关打开: MsgTxStatus_b != FALSE。• 当前发送周期到期: MsgCyclePeriod到期。
4.4 CanNm_UpdateTxPdu 组装发送报文
真正发之前,源码会先调用:
CanNm_UpdateTxPdu(ConfigPtr_pcs, RamPtr_ps);这个函数负责把最新的 CBV 和 User Data 更新到 TxBuffer_au8。
如果支持 COM User Data,并且不是 TriggerTransmit 模式,会先从 PduR 拉取最新用户数据:
PduR_CanNmTriggerTransmit(ConfigPtr_pcs->PduRId, &PduInfo_s);然后更新 CBV:
TxBufferPtr[ConfigPtr_pcs->ControlBitVectorPos_u8] = RamPtr_ps->TxCtrlBitVector_u8;再把 User Data 拷贝到发送缓冲区:
CanNm_CopyBuffer(UserDataPtr, TxBufferPtr, ConfigPtr_pcs->UserDataLength_u8);所以对普通周期 NM PDU 来说,发送前的报文内容来自:
• Node ID:初始化时写入 TxBuffer_au8。• CBV:每次发送前由 TxCtrlBitVector_u8刷新。• User Data:来自 UserDataBuffer_au8,或者通过 PduR 从 COM 获取。
4.5 CanNm_MessageTransmit 调 CanIf_Transmit
底层发送出口是:
RetValOfFuncs_ui = CanIf_Transmit(ConfigPtr_pcs->TxPduId, &(RamPtr_ps->Pdu_s));调用前,CanNm 会打开发送超时监控:
RamPtr_ps->TxTimeoutMonitoringActive_b = TRUE;如果 CanIf_Transmit() 返回 E_OK,说明发送请求被 CanIf 接受,CanNm 启动 message timeout timer:
CanNm_StartTimer(RamPtr_ps->PrevMsgTimeoutTimestamp);如果返回 E_NOT_OK,说明发送请求没有被接受,CanNm 关闭本次超时监控:
RamPtr_ps->TxTimeoutMonitoringActive_b = FALSE;发送成功提交后,CanNm_MainFunctionTx() 还会更新下一次发送周期:
if(RamPtr_ps->ImmediateNmTx_u8 == 0){ RamPtr_ps->MsgCyclePeriod = ConfigPtr_pcs->MsgCycleTime;}else{ RamPtr_ps->MsgCyclePeriod = ConfigPtr_pcs->ImmediateNmCycleTime; RamPtr_ps->ImmediateNmTx_u8--;}CanNm_StartTimer(RamPtr_ps->PrevMsgCycleTimestamp);如果配置了 Immediate NM 发送次数,源码会先使用 ImmediateNmCycleTime 快速发送若干帧;Immediate 发送耗尽后,再回到常规 MsgCycleTime。如果未配置 Immediate 发送,则发送周期直接按常规周期运行。
4.6 TxConfirmation 结束一次发送闭环
当下层确认一帧 NM PDU 已经发送完成后,CanIf 会回调:
void CanNm_TxConfirmation(PduIdType TxPduId, Std_ReturnType result)这个函数会:
RamPtr_ps->TxConfirmation_b = TRUE;RamPtr_ps->TxTimeoutMonitoringActive_b = FALSE;如果 MsgTxStatus_b 仍然为 TRUE,还会更新 PrevMsgTimeoutTimestamp。
后续 CanNm_MainFunction() 会读取 TxConfirmation_b。如果当前没有接收事件,但有发送确认事件,CanNm_NetworkModeProcessing() 会刷新 NM Timeout Timer:
if (PduTxConfirmation_b != FALSE){ CanNm_StartTimer(RamPtr_ps->ctNMTimeoutTimer);}这说明 CanNm 不仅靠“收到别人的 NM 报文”维持网络,也会通过“自己成功发出 NM 报文”刷新 NM Timeout。
5. 上层触发的额外发送
除了周期发送,源码里还有 CanNm_Transmit()。
它用于 PduR 触发一次带指定 User Data 的 NM PDU 发送:
Std_ReturnType CanNm_Transmit(PduIdType CanNmTxPduId, const PduInfoType * PduInfoPtr)这个 API 只有在状态是 NM_STATE_REPEAT_MESSAGE 或 NM_STATE_NORMAL_OPERATION 时才会真正发送:
if ((RamPtr_ps->State_en == NM_STATE_REPEAT_MESSAGE) || (RamPtr_ps->State_en == NM_STATE_NORMAL_OPERATION)){ CanNm_CopyBuffer(PduInfoPtr->SduDataPtr, UserDataPtr, (uint8)PduInfoPtr->SduLength); RetVal_en = CanNm_MessageTransmit(ConfigPtr_pcs, RamPtr_ps);}因此,CanNm_Transmit() 不是状态机周期发送的替代品,而是上层在合法网络状态下请求额外发送 NM PDU 的入口。
6. 把收发和状态机合在一起看
最后用一条完整链路总结。
6.1 接收链路

6.2 状态机消费链路
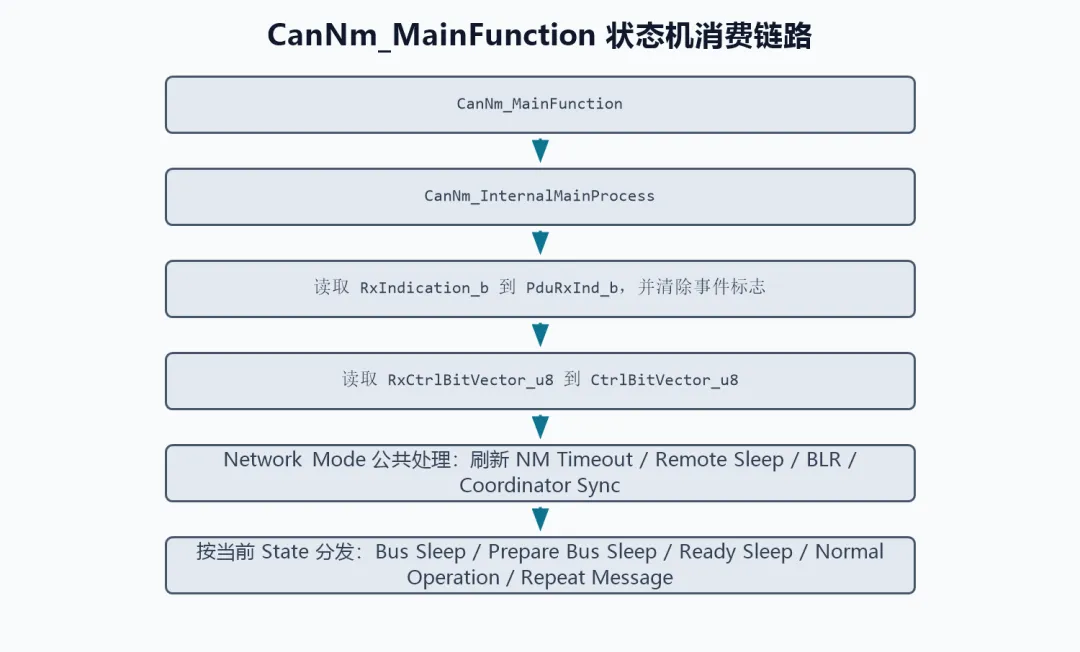
6.3 发送链路

7. 这套源码的核心理解
这套 CanNm 源码最核心的设计可以概括为三句话。
第一,接收回调只负责“记账”。
CanNm_RxIndication() 不直接做复杂状态机,它把收到的 NM PDU 解析到 RAM,置位 RxIndication_b,然后退出。
第二,状态机只在 CanNm_MainFunction() 中集中运行。
CanNm_MainFunction() 消费接收事件、发送确认事件、CBV、网络请求状态和多个软件定时器,再决定状态如何流转。
第三,发送由状态机打开,由 MainFunctionTx 周期执行。
进入 Network Mode 或 Repeat Message 时,CanNm_StartTransmission() 打开发送开关;后续 CanNm_MainFunctionTx() 按周期调用 CanNm_UpdateTxPdu() 和 CanNm_MessageTransmit(),最终通过 CanIf_Transmit() 发到 CAN 总线。
理解这三点后,再看 CanNm 的各个 API 就会清晰很多:NetworkRequest、NetworkRelease 改的是网络请求状态;RxIndication 改的是接收事件;TxConfirmation 改的是发送确认事件;真正把这些事件编排成网络管理行为的,是周期运行的 CanNm_MainFunction()。
