 夜雨聆风
夜雨聆风上一篇讲了Commander——它决定"该不该飞"。该飞了,往哪飞?这就是Navigator的事。
Mission模式飞航线,是无人机最常见的任务场景。QGC里画几个点,上传,无人机就老老实实一个个飞过去。看起来简单,背后Navigator做了大量的活:航点解析、路径跟踪、地理围栏校验、ROI航向控制、降落航线规划……每一项都是实打实的算法。
我把Navigator的源码翻了一遍,把这条"从航点到电机"的完整决策链理清楚。
Navigator在系统里的位置
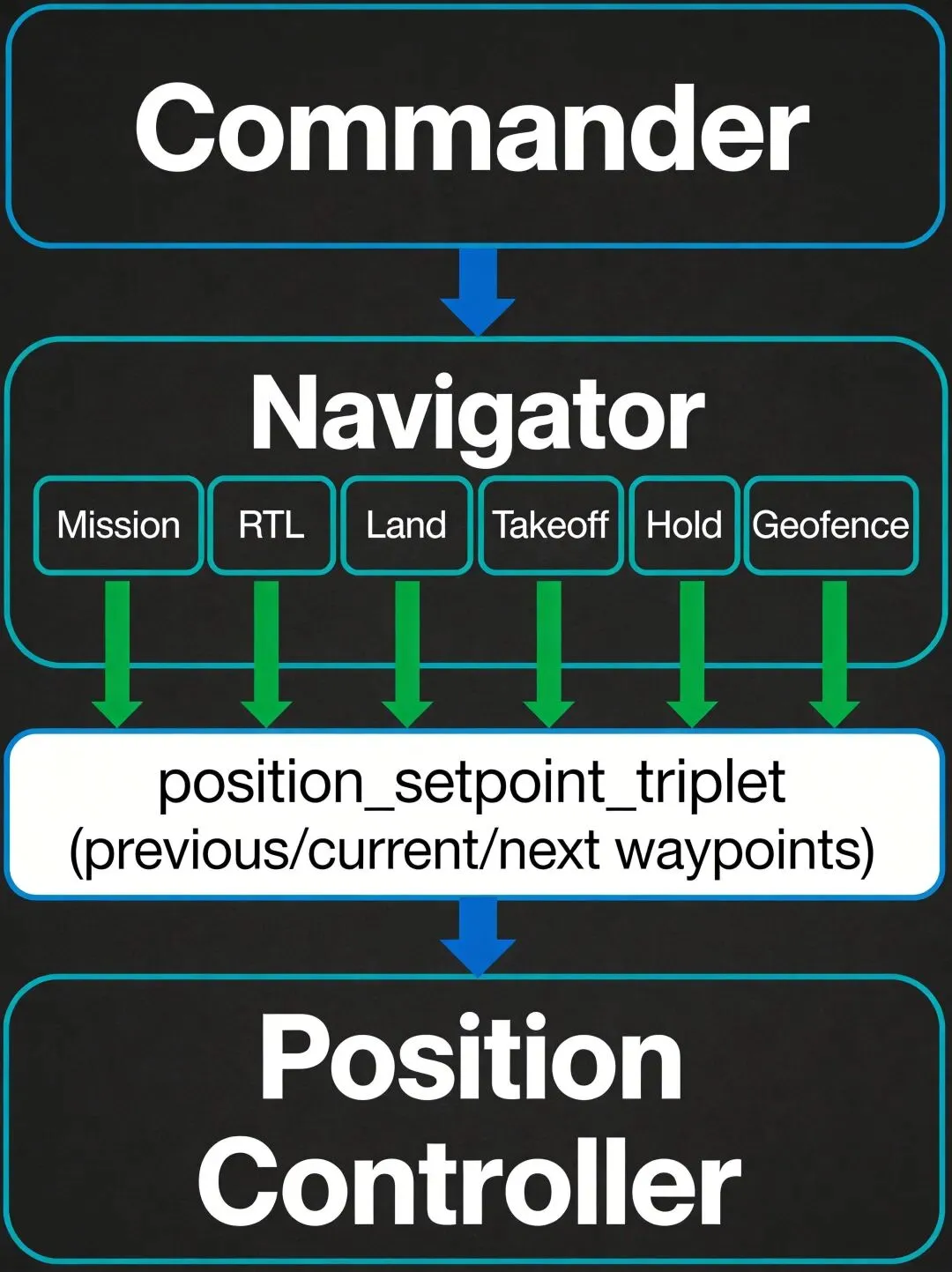
先回顾一下数据流。Commander输出导航状态(Mission/RTL/Hold/Land/Takeoff),Navigator收到后,根据当前模式从SD卡读取航点信息,计算出目标位置,发布position_setpoint_triplet给位置控制器。位置控制器再往下走PID链路,最终驱动电机。
Navigator不是自己干所有事,它是一个调度器。内部有6个独立的飞行模式模块:
Navigator的主循环run()以20Hz频率运行,每次循环做三件事:
订阅 vehicle_local_position和vehicle_status,获取当前位置和飞行状态根据Commander下发的导航模式,调用对应模块的 on_active()将计算出的 position_setpoint_triplet发布到uORB
这个triplet是个关键数据结构,包含三个航点:previous、current、next。位置控制器拿到它,就知道"从哪来、到哪去、下一步去哪"。
Mission模式:一条航线是怎么飞的
Mission是Navigator最复杂的模块。核心流程可以拆成三步:读航点、判断是否到达、推进到下一个。
航点读取与解析
航点存在SD卡上,Mission模块通过read_mission_item()从SD卡读取当前索引的航点,填充到mission_item_s结构体。每个航点包含:
经纬高(AMSL绝对高度) 航点类型:WAYPOINT、LOITER、TAKEOFF、LAND等 停留时间(time_inside) 盘旋半径和方向 航向约束(yaw) 接受半径(acceptance_radius)
然后set_mission_item()把当前航点复制到pos_sp_triplet.current,前一个航点放previous,下一个航点放next。三航点信息齐全,位置控制器就可以工作了。
航点到达判定:不是到了就算
这是容易踩坑的地方。飞机什么时候算"到达"航点?不是飞到正上方,而是进入以航点为中心的某个范围内。
多旋翼和固定翼的判定逻辑完全不同:
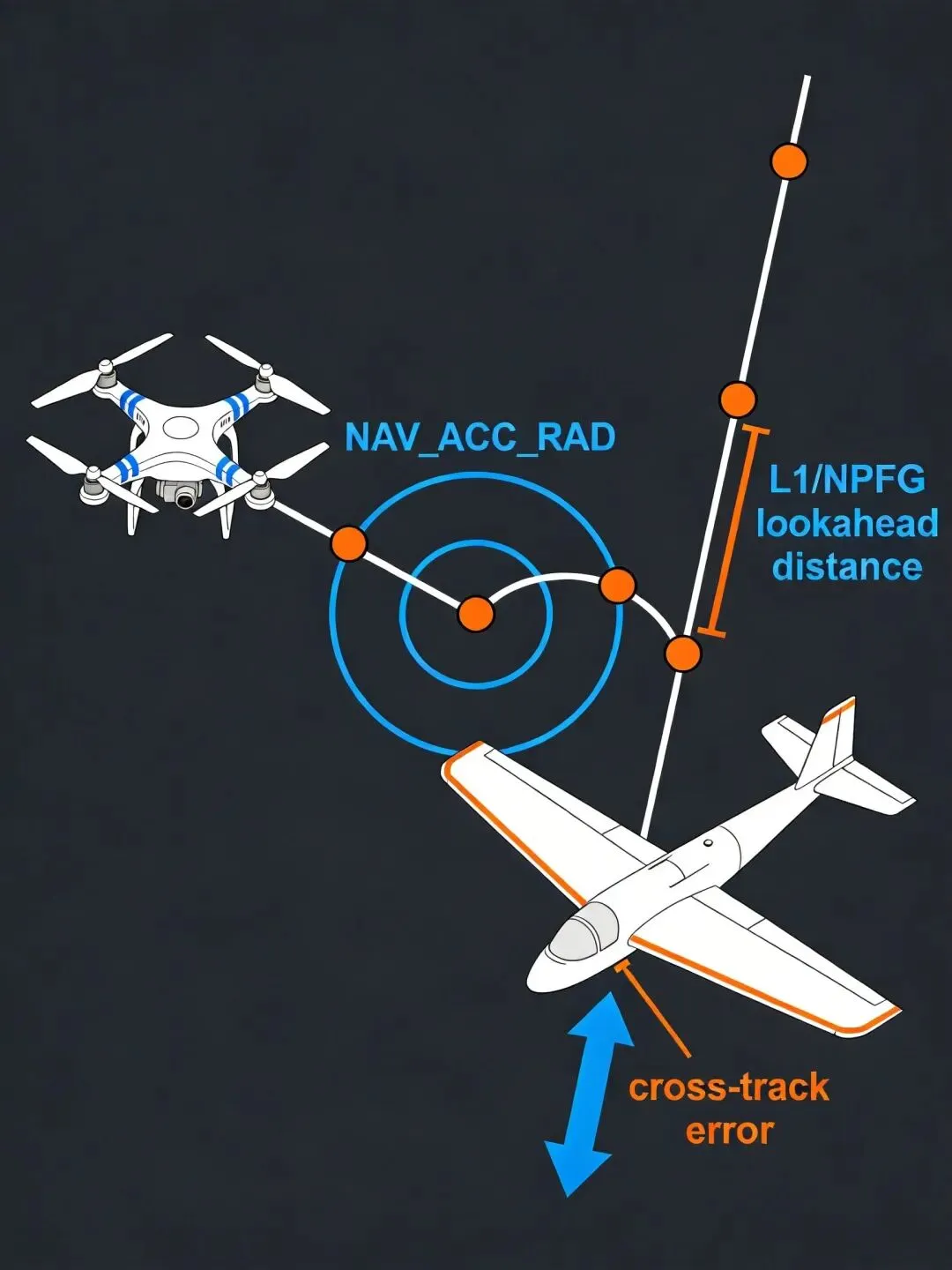
多旋翼用NAV_ACC_RAD参数定义接受半径,默认很小(约0.5m)。飞机进入这个半径就算到达,立刻切换下一个航点。如果你把NAV_ACC_RAD调大,飞机会提前转弯,路径更平滑但精度降低。
固定翼不用NAV_ACC_RAD,而是用L1距离(新版改为NPFG距离)。计算公式:
L1_distance = (1/π) × NPFG_PERIOD × NPFG_DAMPING × ‖v_xy_ground‖
默认参数下,20m/s地速时L1距离约70m。也就是说,固定翼在离航点70m的地方就已经开始转向下一个航点了。这是物理限制——固定翼不能原地悬停,必须提前转弯。
航点推进逻辑
简化后的核心逻辑:
// Mission::on_active() 简化
voidMission::on_active()
{
// 1. 读取当前航点
set_mission_item();
// 2. 判断当前航点是否到达
if (is_mission_item_reached()) {
// 停留时间检查
if (time_inside_ready()) {
// 推进到下一个航点
advance_mission_index();
set_mission_item();
}
}
// 3. 更新航向
heading_sp_update();
// 4. 发布位置设定值
navigator->set_position_setpoint_triplet_updated();
}
is_mission_item_reached()的判定条件因航点类型不同:
WAYPOINT:水平距离 < acceptance_radius 且 垂直距离 < NAV_FW_ALT_RAD LOITER:盘旋时间到 或 圈数到 TAKEOFF:到达起飞高度 LAND:着陆检测
time_inside是航点的停留时间参数。比如测绘任务里需要在每个点悬停3秒拍照,就设time_inside=3。停留期间飞机不会推进到下一个航点。
路径跟踪算法:从L1到NPFG
航点到达判定解决了"什么时候切换",路径跟踪算法解决"怎么飞过去"。
L1控制器(经典方案)
PX4早期的固定翼路径跟踪用的是L1控制器。核心思想:在飞机前方L1距离处取一个参考点,计算侧向加速度指令,让飞机朝参考点转弯。
a_lat = (2 × v² / L1) × sin(η)
η是地速方向到参考点的角度。L1越小转弯越激进,L1越大路径越平滑。
关键参数:
NPFG_PERIOD(旧名FW_L1_PERIOD):默认15m,越小响应越快但可能震荡NPFG_DAMPING(旧名FW_L1_DAMPING):默认0.75
NPFG控制器(PX4 1.13+)
PX4 1.13之后引入了NPFG(Nonlinear Path Following Guidance),替代L1。NPFG的改进:
抗风能力:L1用地速计算,大风时地速方向可能跟航向差很大,L1会判断失误。NPFG用空速估计,能补偿风的影响 超风处理:当风速超过空速,固定翼会被风吹着走。NPFG能检测这种极端情况,切换到最小能耗策略 动态跟踪误差边界:根据当前地速动态调整可接受的偏航距离
关键参数还是NPFG_PERIOD和NPFG_DAMPING,调参方法跟L1一样:先缩PERIOD直到响应灵敏但不震荡,再微调DAMPING。
多旋翼的路径跟踪简单得多——直接飞到目标点,用的是jerk-limited轨迹规划。转弯速度自动根据接受半径和最大加速度/jerk计算,保证平滑。
航向控制:飞过去还要朝对方向
光飞到航点不够,很多时候还得朝对方向。Navigator通过heading_sp_update()计算航向设定值。
航向策略由MPC_YAW_MODE控制:
ROI(Region of Interest)是很有用的功能。比如航拍任务,你可以设一个ROI点(比如一栋楼),然后无人机飞航线时始终朝向这栋楼。Navigator通过vehicle_roi uORB消息把ROI信息传给位置控制器。
多旋翼可以独立控制航向和飞行方向,所以这些策略都能正常工作。固定翼航向和飞行方向耦合,航向设定会被忽略——飞机只能朝飞的方向看。
地理围栏:不让你飞的地方别飞
Geofence是Navigator的另一个重要职责,它在所有模式下都生效,不只是Mission。
PX4提供两层围栏:
基础围栏(Failsafe Geofence)
一个以Home为中心的圆柱体:
GF_MAX_HOR_DIST | ||
GF_MAX_VER_DIST | ||
GF_ACTION |
围栏参数默认都是0,等于没开。实际项目一定要配上。
高级围栏(Geofence Plan)
QGC里可以画多个多边形和圆形区域,分别标记为inclusion(只能在里面飞)和exclusion(不能飞进去)。这比基础围栏灵活得多——可以在禁飞区周围画exclusion区域,在作业区域画inclusion区域。
注意:任何不包含Home位置的围栏都会被飞控拒绝上传。飞行中上传的围栏如果立即被违反,也会被拒绝。
围栏检测在Navigator主循环里每次都执行,不依赖当前飞行模式。一旦触发,按GF_ACTION设定的动作响应。
航线可行性检查:飞之前先验一遍
Mission上传和首次解锁时,PX4会做一系列可行性检查。检查不通过,任务不允许启动:
第一个航点离Home太远( MIS_DIST_1WP)航点跟围栏冲突 固定翼降落滑道角度超限( FW_LND_ANG,默认5度)多个降落起始点( MAV_CMD_DO_LAND_START只能有一个)缺少起飞/降落项( MIS_TKO_LAND_REQ,固定翼和VTOL默认要求有降落项)
这些检查避免了"飞到一半发现任务不合理"的尴尬。
固定翼降落航线:最复杂的单条航线
固定翼Mission里,降落航线是最讲究的。一条标准的降落航线由两个航点组成:
盘旋点( MAV_CMD_NAV_LOITER_TO_ALT):飞机飞到这个点上空,盘旋下降到指定高度降落点( MAV_CMD_NAV_LAND):从盘旋高度沿滑道角下滑,接地前拉平(flare)
滑道角由两个航点的3D位置决定,不能超过FW_LND_ANG。QGC上传时会检查,角度太大直接拒绝。
降落阶段的参数很细:
FW_LND_ANG | |
FW_LND_AIRSPD | |
FW_LND_FLALT | |
FW_LND_FL_TIME | |
FW_FLAPS_LND_SCL | |
FW_LND_EARLYCFG |
拉平逻辑是:从高度跟踪切换到浅下沉率设定值,同时限制油门,机头上仰减速,实现软着陆。腹板着陆的话一直保持拉平状态直到触地检测和上锁。
任务暂停与恢复
Mission可以被暂停——切换到Hold或Position模式就行。切回Mission模式后,从当前位置飞向当前活跃航点,继续执行。
注意:暂停期间如果你移动了飞机,恢复后不会沿着原来的航线飞,而是直接飞向当前航点。
任务只有在解锁或上传新任务时才会重置。DO_JUMP指令的循环计数器在手动切换航点时不会重置——这是很多人不知道的坑。如果你跳到航点1想"重新开始",跳转计数没清零,循环次数可能不够。
关键参数速查
NAV_ACC_RAD | |||
NAV_LOITER_RAD | |||
NAV_MIN_LTR_ALT | |||
NPFG_PERIOD | |||
NPFG_DAMPING | |||
MIS_TAKEOFF_ALT | |||
MPC_TKO_SPEED | |||
MPC_LAND_SPEED | |||
MIS_DIST_1WP | |||
MIS_TKO_LAND_REQ | |||
FW_LND_ANG | |||
GF_MAX_HOR_DIST | |||
GF_MAX_VER_DIST | |||
GF_ACTION | |||
MPC_YAW_MODE | |||
COM_RC_OVERRIDE |
踩坑记录
我调航线的时候遇到过几个典型问题:
1. 固定翼飞不到航点正上方
这不是bug,是特性。L1/NPFG距离70m意味着飞机在离航点70m处就开始转弯。如果你需要飞到航点正上方(比如投送物资),得多旋翼干这活,或者把航点间距拉大到3倍L1距离以上。
2. NAV_ACC_RAD调大了航线偏移严重
多旋翼的接受半径不是"到这就停",是"到这就切换下一航点"。调大了飞机会提前转弯,航线内侧会切角。需要精度的场景(测绘、巡检)保持默认小值,需要平滑的航线(航拍)适当放大。
3. 围栏忘了开
GF_MAX_HOR_DIST和GF_MAX_VER_DIST默认都是0,等于没围栏。实际项目第一件事就是配上围栏,GF_ACTION至少设成Warning,推荐设成Return。
4. 固定翼降落滑道角超限
QGC规划降落航线时,盘旋点和降落点的3D位置差决定了滑道角。如果你把盘旋点高度设得很高、离降落点又近,角度很容易超FW_LND_ANG。上传时会被拒,但如果你在地面没测试直接起飞就麻烦了——提前验证任务可行性。
5. DO_JUMP循环计数不重置
手动在QGC里切换当前航点不会重置DO_JUMP的计数器。如果你想让任务真正从头开始,要么重新上传任务,要么解锁再上锁。
小结
Navigator是Commander和位置控制器之间的桥梁。Commander说"飞Mission",Navigator就从SD卡读航点、算路径、检查围栏、发布目标位置。Commander说"返航",Navigator就接手RTL逻辑。每种模式都有独立的模块处理,Navigator只做调度。
理解Navigator的关键在于理解position_setpoint_triplet——previous/current/next三航点构成了位置控制器需要的全部输入。Navigator所有的工作,本质上就是在不同模式下正确填充这个三元组。
下一篇写uLog——飞完之后怎么看数据。
本文代码为简化后的核心逻辑,方向正确但不是PX4真实代码。参数名和默认值已对照PX4官方文档校验。
