 夜雨聆风
夜雨聆风三菱R系列运动控制器系统配置
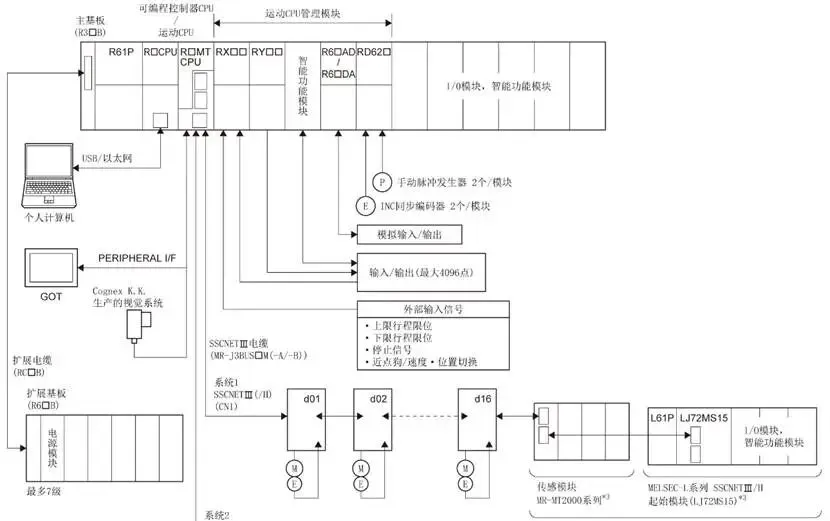
其中包括R16MTCPU, R32MTCPU, R64MTCPU。在运动CPU模块中,可以进行以下伺服放大器控制。

本次就RnMTCPU对应速度模式进行说明。
速度控制模式是指进行至伺服放大器的指令中不包括位置环路的控制。
1,速度控制模式的动作
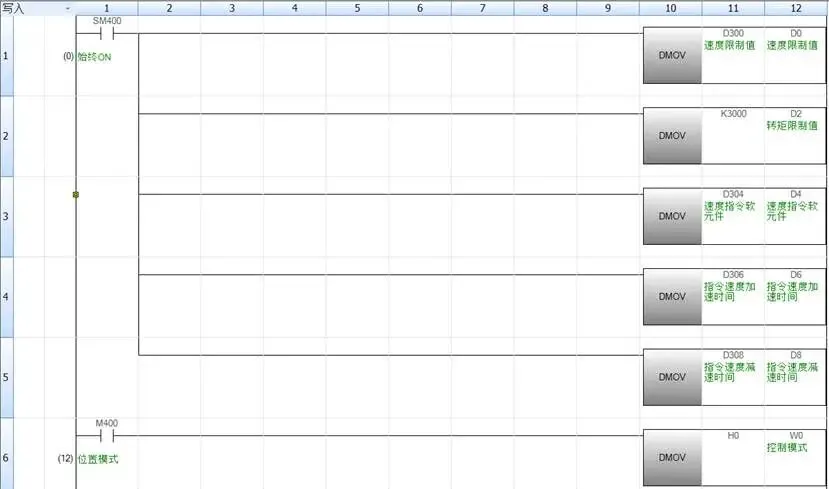
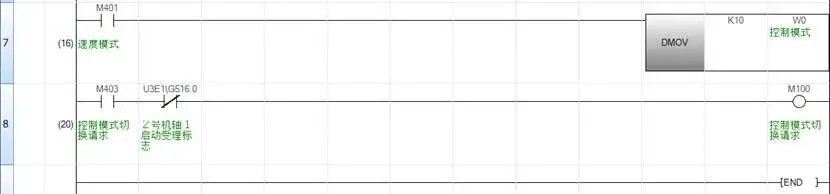
速度控制模式中,以“速度指令软元件”中设置的速度进行速度控制。
正转的情况下设置正的值,逆转的情况下设置负的值。“速度指令软元件”在速度控制模式中可实时更改。
加减速处理将变为梯形加减速处理。应将对于“速度·转矩控制时速度限制值”的加减速时间设置为“指令速度加速时间”、“指令速度减速时间”。控制模式切换请求软元件OFF→ON时的值将变为有效。
速度控制模式中的指令速度通过“速度·转矩控制时速度限制值”被限制。指令了超出速度限制值的速度的情况下,将发生报警(出错代码: 0A5FH),通过速度限制值被控制。
至伺服放大器的指令速度应通过“[Md.28]指令速度(R: D32024+48n,D32025+48n/Q: #8004+20n,#8005+20n)”进行确认。
速度更改请求(CHGV、M(P).CHGV/D(P).CHGV)将变为无效(无处理)。
根据转矩限制值更改请求(CHGT、M(P).CHGT/D(P).CHGT)在“速度·转矩控制时转矩限制值”的范围内,可以更改转矩限制值的值。通过转矩限制值更改请求有“速度·转矩控制时转矩限制值”的范围外的更改请求的情况下,将发生报警(出错代码: 0A5EH),不进行转矩限制值的更改。
2,速度控制模式中的进给当前值
速度控制模式中,“[Md.20]进给当前值(R: D32000+48n,D32001+48n/Q: D0+20n,D1+20n)”、“[Md.101]实际当前值(R: D32002+48n,D32003+48n/Q: D2+20n,D3+20n)”也被更新。
进给当前值超出软件行程限位的情况下,将发生轻度出错(出错代码: 1993H、1995H),切换为位置控制模式。进行至一方向的进给的情况下等,应将软件行程限位置为无效使用。
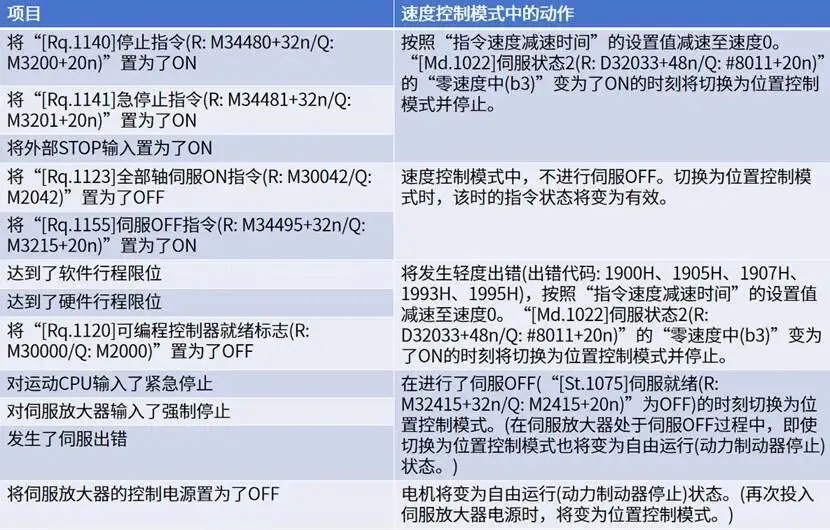
3,速度控制模式中的停止原因
速度控制模式中的停止原因的动作如下所示。
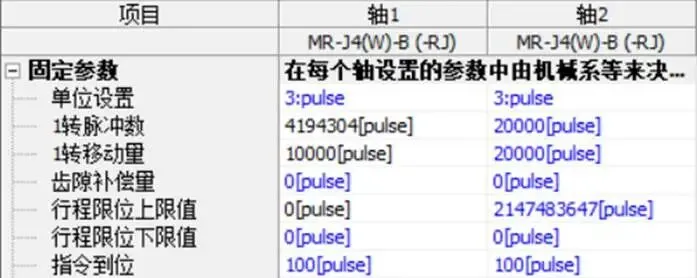
4,具体参数设置
(1)运动控制参数轴设置参数固定参数
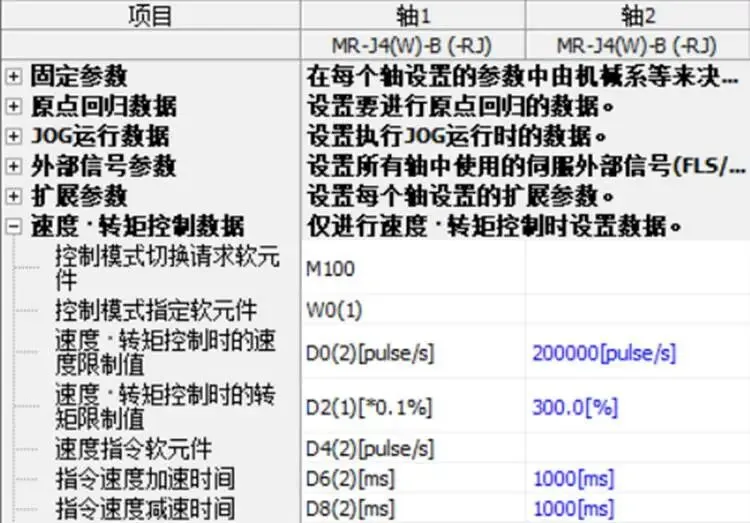
(2)运动控制参数轴设置参数速度、转矩控制数据
5,参考程序
兴东机电设备(深圳)有限公司
三菱电机自动化授权代理商
三菱工控产品技术培训中心
三菱工控产品维修中心
欢迎关注此公众号,如有三菱产品需求、技术问题,可以联系我公司:0755-82984881。
