夜雨聆风
夜雨聆风你的同行已经用AutoSAR(AUTomotive Open System ARchitecture,汽车开放系统架构)将软件交付周期缩短了40%,而你还在手工堆砌模块化代码?传统"裸写驱动+应用"的方式让ECU(Electronic Control Unit,电子控制单元)变得像一座屎山——换一个芯片就要重写底层,客户一个需求变更就能让你熬夜三周。
>_第一章 · 拆解应用层骨架
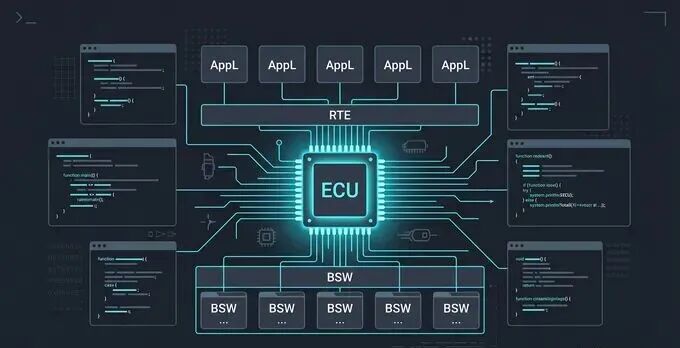
很多人在第一次看到AutoSAR分层架构图时直接眩晕:应用软件层(Application Layer,AppL)、RTE(Runtime Environment,实时运行环境)、BSW(Basic Software,基础软件层)……但请记住:你作为应用层开发者,99%的时间都在和SWC、Runnable、Ports打交道。不要试图跳过这些术语,它们是写出合格代码的前提。
$1.1 SWC(Software Component,软件组件)
在传统开发中,我们会把"车灯控制"、"温度采集"分别写成一个.c文件,然后通过extern或全局变量互相调用。AutoSAR把这种独立的功能单元抽象为SWC(软件组件)。"每一个SWC可以理解为一个.c文件,而整个应用软件层就是一个文件夹"。但这里有一个巨大的陷阱:SWC之间不能直接调用函数或访问全局变量!所有交互必须通过端口(Ports,端口)和接口。这就强制了模块间的低耦合。你需要记忆的第一个重点来了:
★ 重点:一个SWC对应一个原子级的软件功能(比如"左车门开关逻辑"),它在代码层面表现为一个独立的C文件(.c/.h),但内部必须包含若干Runnable(可运行实体)并通过RTE(Runtime Environment,实时运行环境)暴露的API与外界通信。SWC的实例化由RTE管理。
在实战中,如果你要新增一个"雨量传感器处理"功能,你就需要创建一个新的SWC。工具链(比如Vector的DaVinci Developer)会帮你生成框架代码,但手写时也必须遵循相同的命名和接口规范。
$1.2 Runnable(Runnable Entity,可运行实体)
Runnable是SWC内部真正干活的线程单元。你可以把它理解为一个被RTE周期性调用或事件触发的C函数。每个Runnable都是原子执行单元,不能中途阻塞或死等。回忆一下你以前写的while循环等待标志位的代码——在AutoSAR的世界里,那会被视为灾难,因为会拖垮整个OS(Operating System,操作系统)的调度。
一个SWC叫做"调光控制器",里面会包含两个Runnable:Runnable_ReadSwitch(事件触发:开关状态变化)和Runnable_ControlLamp(周期触发:每10ms计算一次输出)。重点来了:
★ 重点:Runnable的原型必须为 void Runnable_Name(void) (无参数,无返回值)。RTE通过任务调度器调用它们。你不能在Runnable内创建线程或者无限循环。所有跨Runnable的数据共享必须使用RTE内部变量或显式端口通信。
当你手写时,每个Runnable就是一个不带任何参数的函数。例如:
voidRte_Runnable_ReadSwitch(void){ /* 通过Rte_Read接口获取端口数据 */ }
。记住:Runnable的名字不是自由发挥的,需要在SWC描述文件(ARXML,AUTOSAR XML)中定义,并与代码中的函数名严格匹配。
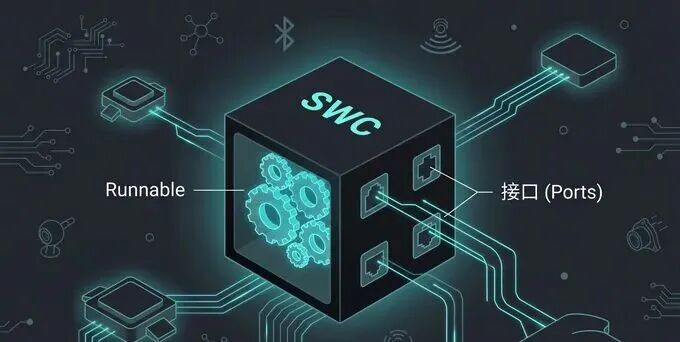
$1.3 Ports(端口)与接口
如果一个SWC不和其他SWC通信,那它就是个孤岛。AutoSAR通过端口(Ports,端口)来定义SWC的对外交互点,而端口必须绑定一种接口(Interface,接口)。最常用的两种接口类型:
- Sender-Receiver(S/R,发送-接收接口)
:用于数据广播,比如一个SWC发送当前车速,多个SWC接收。对应代码中就是写/读一个数据元素。 - Client-Server(C/S,客户端-服务器接口)
:用于函数调用,比如一个SWC调用另一个SWC提供的"计算燃油消耗"服务。对应代码中是RPC(远程过程调用)风格的函数调用。
车门开关SWC(发送者)通过S/R接口将"车门状态"发送给顶灯逻辑SWC(接收者)。你需要注意:端口的方向——PortRoles:提供端口(PPort,提供者端口)和需求端口(RPort,需求端口)。用语言实现时,你看到的是一堆RTE生成的宏,比如Rte_Write__(写数据)和Rte_Read__(读数据)。不要试图直接调用其他SWC的全局变量,那是犯规的。
💡 端口定义在ARXML中,代码中只能通过RTE API访问。开发工具(如DaVinci Configurator Pro)会自动生成Rte_<swc名字>.h,里面声明了所有可用的RTE读写接口。你只需要包含该头文件并调用即可。
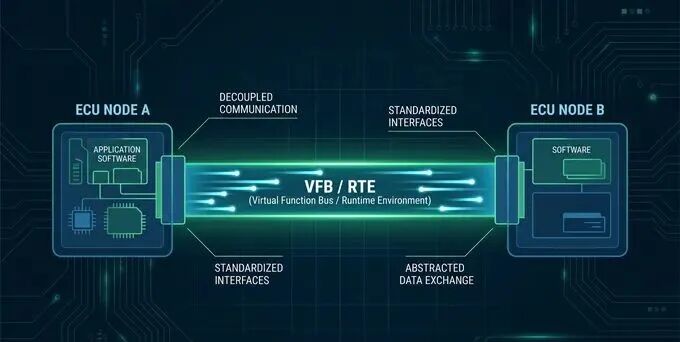
>_第二章 · VFB(虚拟功能总线)与RTE
很多从单片机裸机转到AutoSAR的工程师最不适应的就是"通信方式"。以前你直接extern一个变量,或者直接调用其他模块的API,多么简单粗暴!但AutoSAR凭什么能让你换硬件不换代码?答案就在VFB(Virtual Function Bus,虚拟功能总线)和RTE(Runtime Environment,实时运行环境)这一对黄金搭档上。
$2.1 VFB
"VFB是意义上的片内外通信的结合体",它屏蔽了物理通信介质(是同一ECU内部还是跨ECU的CAN总线)。设计阶段,你只需要画连接器(Connector,连接器)把两个SWC的端口连起来,至于数据是通过共享内存传输,还是通过CAN(Controller Area Network,控制器局域网络)报文转发,VFB的底层实现(RTE+BSW)会自动处理。这是AutoSAR最伟大的抽象之一。
★ 重点:VFB(虚拟功能总线)是一个逻辑通信架构,允许SWC在设计时忽略硬件拓扑。在代码生成阶段,RTE会根据映射关系自动生成片内通信代码(基于共享内存/全局变量的高效方案)或片外通信代码(基于CAN/LIN/Ethernet协议栈)。开发者不需要手动编写CAN打包拆包逻辑。
一个例子:左右车门开关(位于车门ECU)和顶灯控制器(位于顶部ECU)之间的通信,在VFB图上就是一根简单的连接线。实际上跨ECU走的是CAN总线。当你写代码时,在车门SWC内部你依然调用Rte_Write_DoorState(closed),而顶灯SWC中调用Rte_Read_DoorState(&state)。你根本不用关心CAN ID、DLC(Data Length Code,数据长度码)这些东西——底层BSW的COM(Communication Stack,通信协议栈)模块会帮你映射好。但是你必须清楚:跨ECU的通信会带来延迟和可靠性问题,你的Runnable设计要容忍这种异步性。
$2.2 RTE
如果说VFB是逻辑总线,那么RTE就是它的物理实现(至少对于片内通信而言)。RTE是AutoSAR最核心的生成代码,它负责连接应用层SWC与底层BSW,以及SWC之间的交互。当你用工具配置好端口连接之后,RTE会生成一系列函数:
Rte_Write__(value) —— 供发送者SWC调用,将数据写入RTE内部缓冲区。 Rte_Read__(&value) —— 供接收者SWC调用,从RTE缓冲区读取最新数据。 Rte_Call_ (arguments) —— 用于C/S接口,客户端调用服务端提供的函数。 Rte_Run_() —— 由操作系统调度器调用,触发Runnable执行。
除了通信,RTE还提供了其他运行时服务,比如Rte_StartTimer/StopTimer(定时器)、Rte_Event_xxx(事件触发)。这些API必须在SWC的C代码中使用。你绝对不要越过RTE直接访问BSW层(例如直接调用某个MCAL(Microcontroller Abstraction Layer,微控制器抽象层)的驱动函数),那样就破坏了"软硬件隔离"的核心优势。
🚨 严禁在应用层代码中包含任何硬件寄存器操作或特定MCU的宏定义。一旦你写了*(volatile uint32*)0x40021000 |= (1<<2);,你的代码就和硬件锁死了,换了芯片全部重写。这就是使用AutoSAR前原始状态的最大痛点,AutoSAR就是要消灭这种代码。
根据AutoSAR官方方法论,应用层的所有需求应该通过Ports(端口)表达,然后由RTE在背后转化成对BSW模块的调用。例如想获取一个ADC(Analog-to-Digital Converter,模数转换器)的采样值,你的SWC需要通过一个ECU抽象层的端口来读取,而不是直接操作ADC寄存器。工具链会帮你生成这些代码,请严格遵循分层调用原则。
$2.3 连接器(Connector)与部署
一个顶灯的7个SWC被分配到两个ECU上。这种"分配"在AutoSAR中是通过系统配置(System Configuration)完成的。连接器(Connector)绑定两个端口,同时会定义通信的类型:内部连接(Internal Connector)(同一ECU内)或跨ECU连接(External Connector)。在代码层面,内部连接生成的RTE API是直接内存拷贝(或引用),效率极高;而跨ECU连接,RTE会调用COM模块的信号发送/接收函数,并将数据打包成网络信号。因此,你写代码时不需要关心连接是内部的还是外部的,但你需要知道:跨ECU的数据应当尽量设计为周期较长的信号,避免大量高频数据阻塞总线。
至此,你应该能理解AutoSAR的核心哲学了:通过VFB统一通信视图,通过RTE生成可移植的代码。
>_第三章 · 从概念到代码
说一万遍不如写一行代码。手写符合AutoSAR规范的应用层C代码的五大铁律。即使你没有Vector或ETAS工具链,纯手写SWC时也必须遵守这些规则,否则后续集成RTE时会直接编译失败或运行紊乱。
$3.1 铁律一:每个SWC独立成文件,文件命名必须与SWC名称一致
假如你设计了一个SWC叫DoorSwitch_SWC,那么你必须创建DoorSwitch_SWC.c和DoorSwitch_SWC.h。头文件中包含RTE生成的接口头文件(通常是Rte_DoorSwitch_SWC.h),并且声明所有Runnable函数。示例结构化要求:
// DoorSwitch_SWC.h 必须包含 Rte 头文件
#include "Rte_DoorSwitch_SWC.h"
// 声明Runnable(由RTE调用)
void Runnable_ReadDoorSensor(void);
void Runnable_CheckDebounce(void);
注意:不要在头文件中声明任何全局变量供其他SWC访问。所有跨SWC数据必须通过端口接口。
$3.2 铁律二:Runnable实现为无参无返回值的函数,且只能通过RTE API访问外部数据
一个典型的Runnable内部会做三件事:通过Rte_Read_xxx读取输入端口的数据,执行本地算法,然后通过Rte_Write_xxx写出结果。不允许调用非RTE提供的阻塞延迟函数(比如delay_ms()),也不允许无限轮询等待标志。如果必须等待异步事件,应使用RTE的事件机制(Rte_Event_xxx)重新设计状态机。
★Runnable_ControlLight 的流程
1. 调用 Rte_Read_DoorState(&doorState) 读取车门状态;
2. 调用 Rte_Read_LightSwitchMode(&mode) 读取顶灯模式;
3. 根据状态机算出目标亮度值;
4. 调用 Rte_Write_LampIntensity(targetIntensity) 输出到顶灯执行器SWC。
整个过程没有阻塞,执行时间 < 1ms。
$3.3 铁律三:数据一致性保护 —— 使用RTE提供的互斥机制或原子访问
由于Runnable可能被中断或不同任务触发(比如多个周期任务),共享数据可能产生竞态条件。AutoSAR RTE提供了两种方式:1) RTE内部数据通信默认是原子性的(对于基本数据类型,读写是原子的);2) 如果数据是复杂结构体,应使用Rte_IWrite/ Rte_IRead 配合独占区域或显式调用Rte_EnterCriticalSection/ExitCriticalSection。写代码时,禁止自己使用全局关中断的方式(那会破坏OS实时性),必须通过RTE提供的临界区API。
$3.4 铁律四:严格遵守数据类型规范 —— 使用AutoSAR定义的标准类型
不要直接用int、unsigned long这类模糊类型。AutoSAR规定应用层必须使用平台无关的类型别名,例如uint8, sint16, boolean(定义在Std_Types.h中)。同样,所有端口接口的数据类型必须在ARXML中明确定义,代码里保持严格一致。如果接口传递一个VehicleSpeed_Type结构体,你的代码就必须包含该结构体的定义,并且不能擅自增加字段。
$3.5 铁律五:工具链协作 —— 不要逞英雄,让Matlab/Simulink和DaVinci做苦力
MATLAB/Simulink + DaVinci。Simulink用于建模应用层算法(比如扭矩控制、灯光逻辑),然后自动生成C代码(符合AutoSAR标准)。DaVinci Configurator Pro用来配置BSW和RTE,生成RTE API。绝大多数主机厂和供应商不允许完全手写SWC,因为手写出错的概率太高。但你作为工程师,必须能读懂生成的代码,并能手动修正部分Runnable逻辑。因此,:即使使用工具链,你仍然需要理解手写准则,因为总会遇到需要手写复杂驱动(CDD,Complex Device Driver)或修补生成代码的边界情况。根据AutoSAR规范,复杂驱动(CDD,Complex Device Driver)是唯一允许绕过部分标准BSW模块的地方,但CDD也必须遵循端口接口封装。
⚙️ 参考工具链流程:
在Matlab/Simulink中设计应用逻辑,配置好SWC端口和Runnable; 用Simulink Coder/Embedded Coder生成符合AutoSAR的C代码(带RTE API调用); 将生成的SWC代码导入DaVinci Developer,进一步配置RTE映射; 使用DaVinci Configurator Pro生成整个工程的RTE和BSW配置; 最后集成所有代码,编译链接。手写代码出现在步骤2的修正或步骤5的CDD实现中。
$3.6 最后一块拼图:你该如何"写出符合标准的代码"?
综合以上五条铁律,手写一个SWC的核心骨架如下
包含RTE头文件后,所有对外交互都是Rte_Read/Write/Call; 每个Runnable对应一个短小精悍的函数,没有任何阻塞点; 使用AutoSAR标准类型,不直接操作硬件; 如果用到周期性触发,在ARXML中配置Runnable的周期时间,而不是在代码里写while(1){ delay(); }。
当你能够闭眼写出这样的Runnable结构时,你就真正跨越了从"会写"到"会写AutoSAR应用层代码"的鸿沟。
写在最后:那些还在用"裸机思维"写汽车软件的同事,已经在ECU集成测试中被AutoSAR的无缝重配能力按在地上摩擦。供应商更信任能用RTE API解释数据流的人,而不是一个只会点灯的老手。

关注公众号领取资料