 夜雨聆风
夜雨聆风汽车软件与具身智能机器人在感知、定位、规划、控制、AI算法、系统架构、仿真测试、安全运维、人机交互、协同云端十大技术栈上高度同源——本质都是"感知-决策-执行"的智能移动/操作系统,区别主要在于运动学模型和应用场景,底层算法和软件架构可以大量复用。
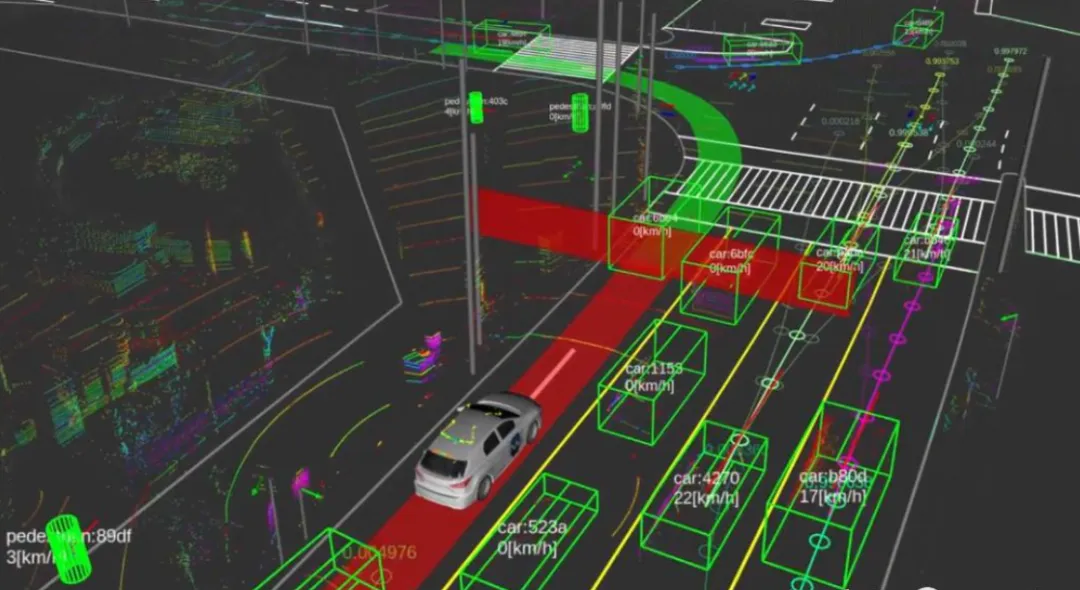
一、环境感知与多模态融合
二、定位与地图构建
三、预测与行为理解
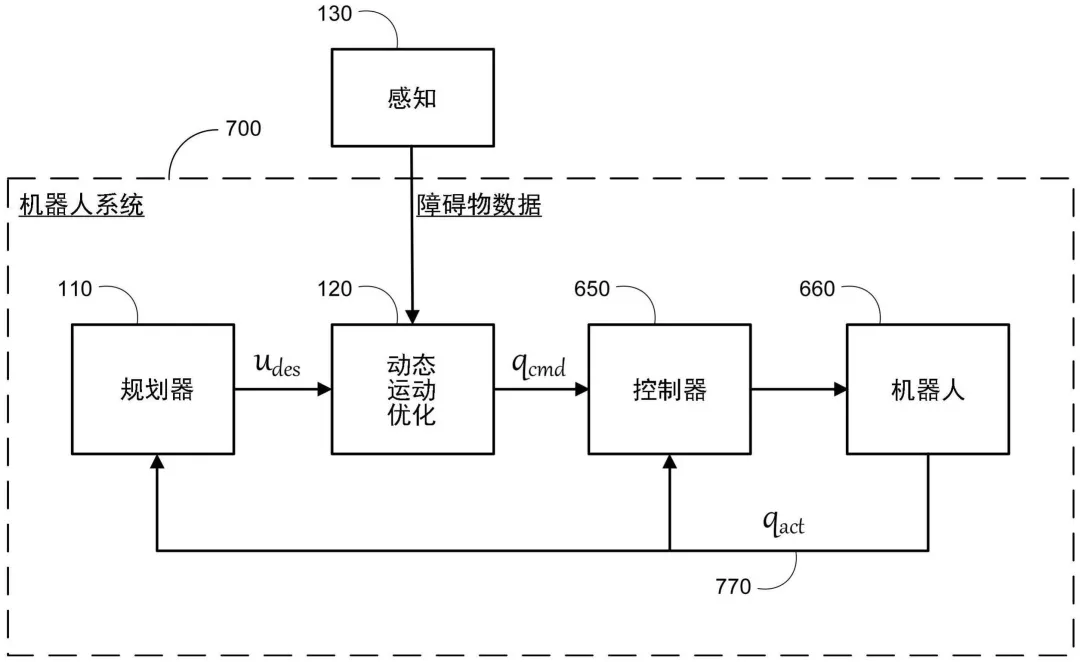
四、规划与决策
五、运动控制
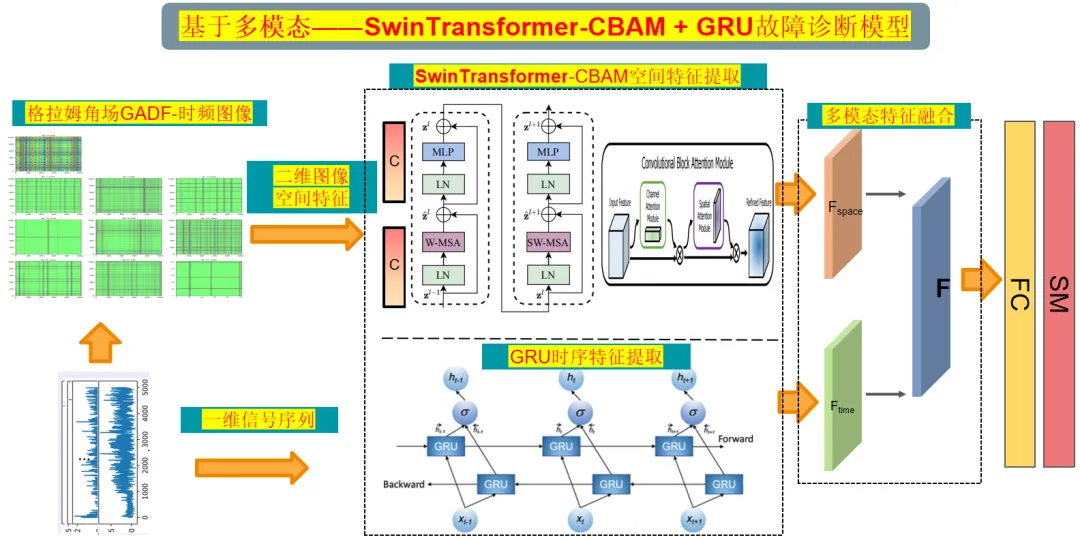
六、大模型与AI算法
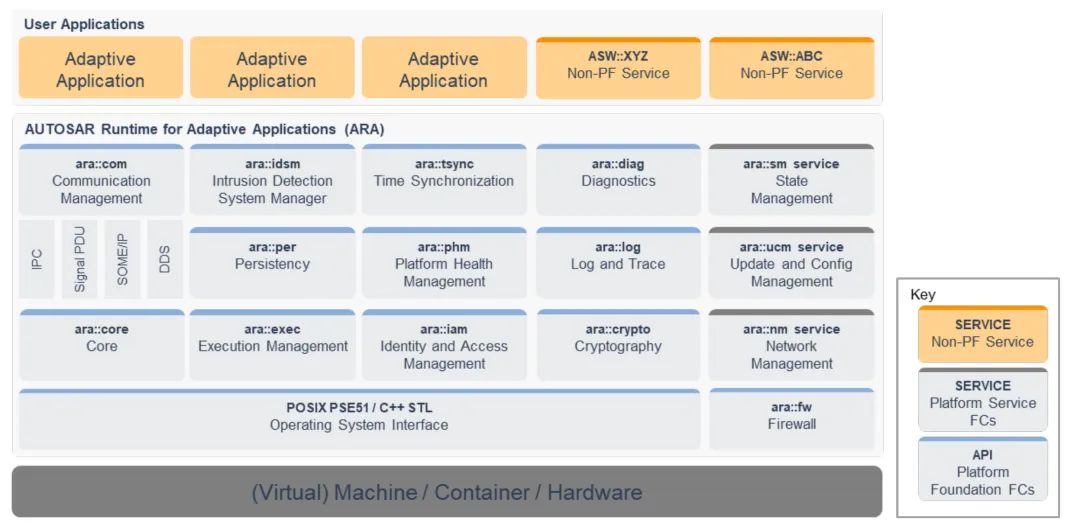
七、系统软件与架构
八、仿真与测试
九、安全与运维
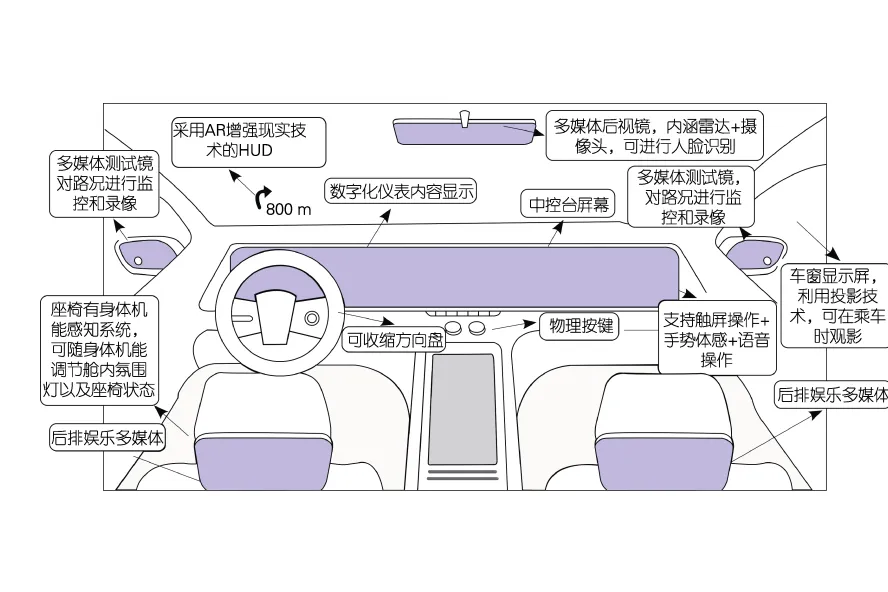
十、人机交互
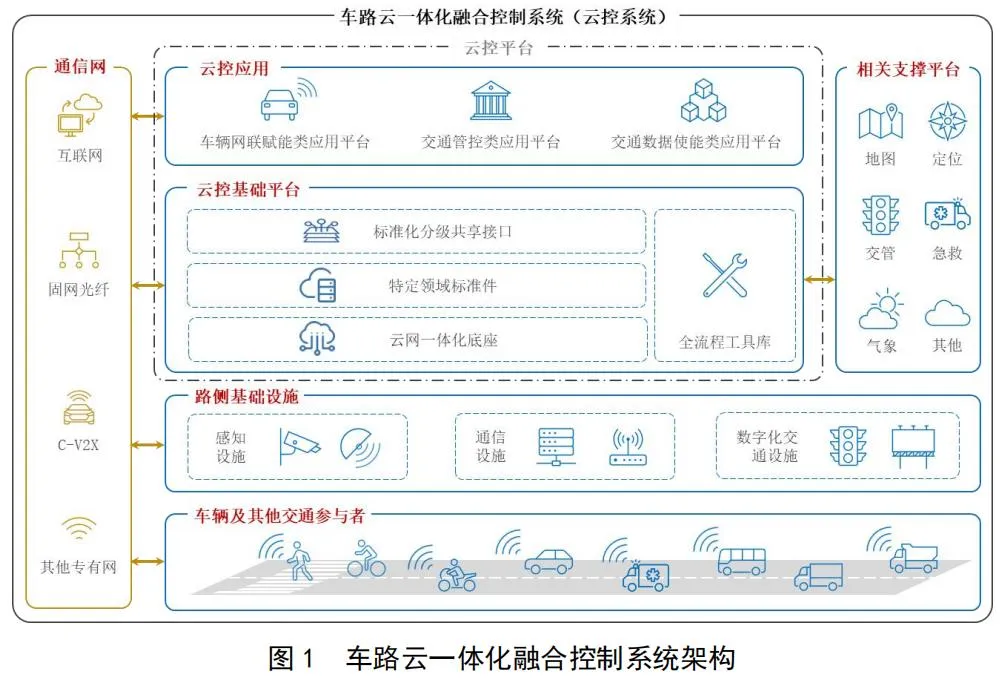
十一、协同与云端
汽车软件与具身智能机器人在感知、定位、规划、控制、AI算法、系统架构、仿真测试、安全运维、人机交互、协同云端十大技术栈上高度同源——本质都是"感知-决策-执行"的智能移动/操作系统,区别主要在于运动学模型和应用场景,底层算法和软件架构可以大量复用。
