 夜雨聆风
夜雨聆风英文标题:From robotic cooking to robotic chef trend: A systematic review of the evolution and impact of robot chefs
作者:Faruk Seyitoğlu
期刊:International Journal of Hospitality Management(2026)
期刊分区:SSCI 一区(酒店、休闲、体育与旅游类)
📌 特别说明:本文是一篇系统性文献综述,而非实证研究。它通过PRISMA框架系统检索并主题分析了70篇相关文献,归纳了机器人厨师研究的三大主题,并提出了未来研究议程。没有传统意义上的“假设”“量表”“统计检验”。
📌 一句话总结
机器人厨师正在从“会做菜的机器”进化成“懂社交的主厨”。
通过对70篇文献的系统综述,研究发现该领域可分为三大主题:① 机器人设计与功能(机械臂、感知系统、任务规划);② 人机交互(合作、接受度、伦理);③ 技术挑战与机遇(AI学习、成本降低、包容性设计)。
自2020年以来相关研究爆发式增长,但消费者体验、味觉感知、美食学影响等关键议题仍严重缺失。
文章还提出了27个未来研究问题,为后续研究绘制了清晰路线图。
🧠 研究背景
机器人厨师不再是科幻。从广州Foodom机器人餐厅到美国的Flippy汉堡机器人,自动化烹饪正在快速进入现实。
推动力有三:① 效率与一致性——机器人能精准执行重复性任务;② 劳动力短缺——餐饮业长期缺人,机器人成“救兵”;③ 辅助生活——帮助老年人和行动不便者独立烹饪。
但挑战同样巨大:消费者认为机器人做的菜“没灵魂”、缺乏创造力;技术上难以处理软性食材(如面糊);社会接受度也受制于“恐怖谷”效应。
问题是:我们到底已经研究到什么程度?还缺什么?未来该往哪里走?
🎯 研究目标
本研究旨在通过系统性综述回答以下问题:
机器人厨师研究有哪些核心主题和子主题?
研究趋势和知识缺口在哪里?
未来应优先研究哪些方向?
🧪 研究方法(系统性综述 + 主题分析)
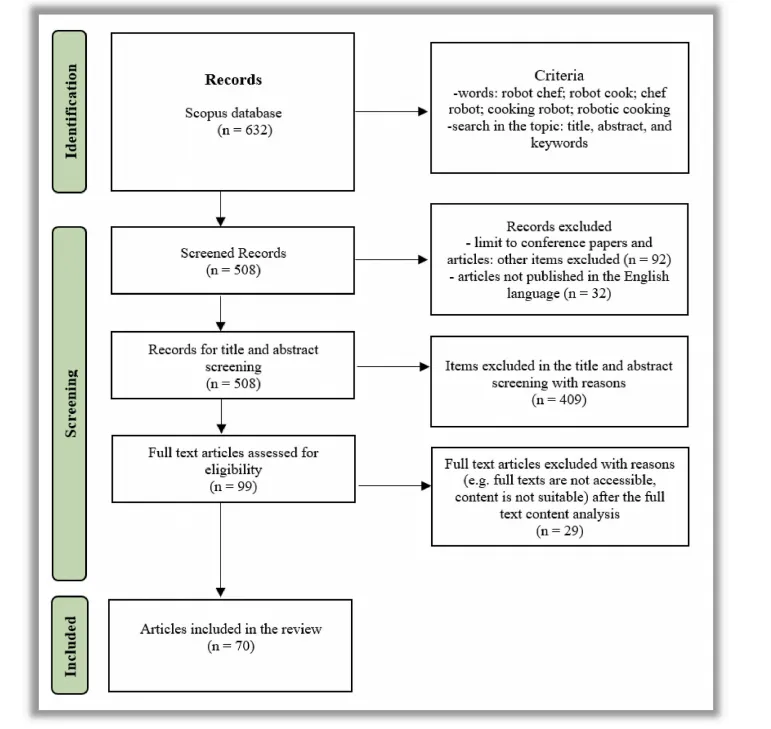
检索流程(PRISMA,见原文图1)
| 阶段 | 操作 | 结果 |
|---|---|---|
| 识别 | Scopus检索关键词:“cooking robot”“robotic cooking”“robot chef”“robot cook”“chef robot” | 632篇 |
| 筛选 | 限期刊论文和会议论文、英文 | 508篇 |
| 合格 | 标题/摘要筛选 + 全文评估 | 70篇 |
| 纳入 | 最终纳入主题分析 | 70篇 |
文献特征(描述性统计)
时间分布:2005-2019年仅14篇,2020-2025年达56篇(占80%)
文献类型:会议论文37篇,期刊论文33篇
研究方法:实证62篇(其中38篇为定量实验),概念性8篇
应用场景:餐厅、家庭、电商仓库、学校;目标用户包括普通消费者、老年人、残疾人、游客
📌 无传统“量表”和“统计检验”,而是通过主题分析六阶段(熟悉数据→生成初始编码→搜寻主题→审查主题→定义主题→撰写报告)提炼三大主题。
🔍 主题分析核心发现
主题1:机器人设计与功能(工程技术核心)
子主题1.1:操作与运动
从单臂简单动作到双臂协调(如翻转、翻炒)
关键研究:Wang et al. (2009) 优化翻炒机构减振降噪;Zhai et al. (2015) 双人形机器人动态分析
缺口:处理变形食材(如面团、酱汁)的灵巧性仍不足
子主题1.2:感知与情境感知
视觉识别食材和烹饪状态为主流
创新:Kanazawa et al. (2024) 用视觉-语言模型识别食材并执行自然语言食谱
缺口:触觉、肌电、听觉等多模态感知整合不足
子主题1.3:任务规划与自动化
从预设程序到AI自主规划
突破:Sakib & Sun (2024) 用大语言模型+知识网络生成任务树,提升规划精度;Sochacki et al. (2023) 机器人通过观察人类厨师学习新食谱,准确率93%
缺口:如何将烹饪中的“隐性知识”(如火候、调味直觉)编码给机器人
主题2:人机交互(社会接受度核心)
子主题2.1:合作与协作
机器人作为“烹饪助手”而非完全替代
Oechsner et al. (2022) 发现机器人可协助从切菜到复杂菜谱复现
挑战:安全性、沟通自然性、用户信任
子主题2.2:接受与社会融入
消费者对机器人厨师态度矛盾:认可效率与一致性,但质疑“没有灵魂”
Seyitoğlu et al. (2025) 指出机器人缺乏人类厨师的创造力、味觉判断和社交能力
Huang et al. (2023) 发现“真实性”和“灵活性”是主要障碍
关键概念:“Love Gap”——消费者认为人类厨师“用心”烹饪,机器缺乏情感投入
子主题2.3:伦理与沟通
披露时机:Zhu & Zhang (2024) 发现机器人厨师身份披露时间影响消费者的伦理感知
拟人化悖论:Xiao & Zhao (2022) 发现越拟人化的机器人虽提升接受度,却降低对食物“美味”的期待
Lee & Kwak (2025) 发现机器人越像人,尝试意愿越低
主题3:技术挑战与机遇(未来突破点)
子主题3.1:AI与适应性
机器学习 + 大语言模型 + 知识图谱 → 任务规划和执行
代表性研究:Kanazawa et al. (2024) 将LLM与经典规划结合,实现真实场景烹饪
未来方向:让机器人优化“烹饪质量”(风味、口感)而非仅“任务完成速度”
子主题3.2:成本降低与实用化
面向家庭的自学习、低成本机器人设计
Jiang & Zhou (2022) 开发低成本自学习机器人;Mepani et al. (2022) 紧凑型机器人臂
关键:让机器人烹饪技术“飞入寻常百姓家”
子主题3.3:包容性设计
为老年人和残疾人设计辅助烹饪机器人
Hu et al. (2024) 综述了面向老龄化人口的机器人烹饪解决方案
强调:可用性、安全性和个性化
💡 未来研究议程(27个问题,本文核心贡献)
主题1:设计与功能(RQ 1.1-1.5)
| 编号 | 研究问题 |
|---|---|
| RQ 1.1 | 如何让机器人更灵巧地处理变形食材(面团、酱汁)? |
| RQ 1.2 | 如何整合触觉、肌电、听觉等高级感知模态? |
| RQ 1.3 | 如何用AI让机器人自主解读复杂食谱并协调多机器人系统? |
| RQ 1.4 | 如何设计模块化系统以适应不同厨房布局? |
| RQ 1.5 | 如何让硬件和控制优先保留和提升风味、质地、香气(而非仅自动化)? |
主题2:人机交互(RQ 2.1-2.10)
| 编号 | 研究问题 |
|---|---|
| RQ 2.1 | 如何设计协作型机器人厨师,增强“共享主体性”? |
| RQ 2.2 | 影响用户接受度的关键因素有哪些? |
| RQ 2.3 | 如何应对偏见、透明度、就业替代等伦理问题? |
| RQ 2.5 | 拟人化程度如何影响消费者对食物质量和尝试意愿? |
| RQ 2.8 | “机器人制作”的标签如何影响味觉感知、支付意愿和真实性? |
| RQ 2.9 | 机器人厨师在“前场”(摆盘、表演)如何影响多感官用餐体验? |
| RQ 2.10 | 文化差异如何影响不同人群对机器人食物的接受度? |
主题3:技术挑战与机遇(RQ 3.1-3.8)
| 编号 | 研究问题 |
|---|---|
| RQ 3.1 | 如何让机器人从人类演示中持续学习和适应? |
| RQ 3.2 | 如何开发安全、高效、经济的家用机器人厨师? |
| RQ 3.7 | 如何将“烹饪质量指标”(感官特征、化学标记、质地测量)纳入学习目标? |
| RQ 3.8 | 如何用“人在回路”(厨师指导、味觉小组)训练机器人产生新颖的感官特征? |
💬 讨论精华
工程与社会科学的桥梁:机器人的“操作能力”和“社会接受度”必须同步推进,缺一不可。
美食学的缺失:现有研究几乎只关注“功能”,而不问“味道”——机器人做出的菜到底好不好吃?如何衡量?
“爱之差距”是心理壁垒:消费者认为机器人做菜“没有爱”,这不仅是技术问题,更是心理和叙事问题——需要“讲故事”来弥补。
披露时机的重要性:在点餐前 vs 点餐后告知“这是机器人做的”,消费者的道德感知完全不同。
🛠️ 实践启示
对餐饮企业
| 策略 | 具体行动 |
|---|---|
| 🍔 效率导向 | 机器人适合标准化、重复性菜品(如汉堡、煎饼),可快速部署 |
| 🍽️ 差异化定位 | 高端餐厅应强调“人机协作”(机器人做重复工,人类做创意),而非完全替代 |
| 📢 透明沟通 | 在菜单上明确标注“机器人协助制作”,并强调一致性、食品安全等优势 |
| 🎨 “讲故事” | 用品牌叙事弥补“爱之差距”——如“我们的机器人由米其林大厨训练” |
对政策制定者
为机器人厨师的伦理披露和就业影响制定指导方针
支持面向老年人和残疾人的包容性烹饪技术研发
⚠️ 研究局限
| 局限 | 未来方向 |
|---|---|
| 仅限Scopus英文文献 | 扩展至Web of Science、中文数据库、灰色文献 |
| 未评估研究质量 | 进行批判性质量评价(如CASP) |
| 未纳入消费者真实体验数据 | 开展消费者实地研究 |
| 烹饪“感官质量”研究严重缺失 | 建立机器人烹饪的感官评价标准 |
英文文献阅读全流程:从文献如何“搜”到怎么“管”再到“读”的一站式攻略


END
点击关注,发送 "人机互动" 即可获取全文PDF
