
















文档内容
普
通
高
中
教
科
书
通
用
技
术
选
择
性
必
修
2
机
器
选择性必修2
人
设
计
与
制
作
广
东
教
育
出
版
社
广
东
科
技 广东教育出版社
出
批准文号:粤发改价格〔2017〕434号 举报电话:12315 定价:7.36元 版 社 广东科技出版社普 通 高 中 教 科 书
选择性必修2
机器人设计与制作
主 编 刘琼发
广东教育出版社
广东科技出版社
·广 州·图书在版编目(CIP)数据
通用技术.选择性必修2:机器人设计与制作/刘琼发主编.—广州:
广东教育出版社:广东科技出版社,2021.6(2021.12重印)
普通高中教科书
ISBN 978-7-5548-4123-5
Ⅰ. ①通… Ⅱ. ①刘… Ⅲ. ①通用技术-高中-教材
Ⅳ. ①G634.931
中国版本图书馆CIP数据核字(2021)第114300号
编 写 单 位:广东教育出版社 广东科技出版社
主 编:刘琼发
副 主 编:李 榕 周卫星 朱美健 席春玲
本 册 主 编:李 榕
本册副主编:郑永驹 钟清华
编 写 人 编:张百睿 李 榕 郑永驹 钟清华
周 嘉 龚泽祥 胡智豪
出 版 人:朱文清
责 任 编 辑:夏 丰
责 任 技 编:许伟斌
装 帧 设 计:友间文化
通用技术 选择性必修2 机器人设计与制作
TONGYONG JISHU XUANZEXING BIXIU 2 JIQIREN SHEJI YU ZHIZUO
广东教育出版社
出版
广东科技出版社
(广州市环市东路472号12-15楼)
邮政编码:510075
网址:http:// www.gjs.cn
广东新华发行集团股份有限公司经销
广州市彩源印刷有限公司
(广州市黄埔区百合3路8号 邮政编码:510700)
890毫米×1240毫米 16开本 6印张 132 000字
2021年6月第1版 2021年12月第2次印刷
ISBN 978-7-5548-4123-5
定价:7.36元
批准文号:粤发改价格〔2017〕434号 举报电话:12315
著作权所有·请勿擅用本书制作各类出版物·违者必究
如有印装质量或内容质量问题,请与我社联系调换
质量监督电话:020-87613102 邮箱:gjs-quality@nfcb.com.cn
购书咨询电话:020-87772438前 言
机器人是20世纪人类的伟大发明,今天,它不仅能够代替人类登陆火星和潜入几千米
以下的深海,还可以不知疲倦地工作在各种生产线上,并服务于我们的日常生活。
关于机器人,我国科学家认为机器人是一种自动化的机器,所不同的是这种机器具备
一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种
具有高度灵活性的自动化机器。国际标准化组织认为工业机器人是一种具有自动控制的操
作和移动功能,能完成各种作业的可编程操作机。
生活在科技迅猛发展的21世纪,同学们有必要了解一些机器人的知识,因为未来的机
器人将对我们的生活和工作产生巨大的影响。
自己动手制作机器人是让同学们了解机器人的最好手段。本教材将会引导同学们进入
机器人设计与制作的精彩世界。通过学习,同学们可以知道机器人的定义,了解机器人的
传动机械、控制器和感知器件的特点及其在机器人中的应用,并初步学会设计与制作机
器人。
在设计与制作机器人的过程中,同学们将尝试机器人的路径规划和运动控制,编制计
算机程序。同时,这个过程也将使我们的视野更加开阔,认识周围世界的能力得到提高,
为进一步深造和发展打下一定的基础。
本教材有利于发展学生核心素养、培养实践能力、提升创新意识、开阔认知视野;有
3利于将自主学习、合作学习、探究学习等多种学习方式渗透进学生的学习和教师的教学当
中;有利于现代教育技术和方法的运用。
希望本教材能激发同学们的灵感和创造才能,在不断的实践中去设计和制作属于自己
的机器人。
4目 录
第一章 人与机器人………………………… 01
一、什么是机器人 ………………………………………02
二、人与机器人的关系 …………………………………04
综合学习活动 …………………………………… 05
本章回顾与评价 ………………………………… 06
第二章 机器人的传动机械………………… 07
第一节 机器人的机械部分 …………………… 08
一、机械部分的组成 ……………………………………08
二、传动机械 ……………………………………………09
第二节 齿轮传动和平面连杆机构 …………… 11
一、齿轮传动机构 ………………………………………11
二、平面连杆机构 ………………………………………16
第三节 机器人的机械设计 …………………… 19
一、机器人的移动机构 …………………………………20
二、机器人的手爪机构 …………………………………23
三、机器人机械部分的搭建 ……………………………24
综合学习活动 …………………………………… 27
本章回顾与评价 ………………………………… 28
1第三章 机器人的控制器…………………… 29
第一节 单芯片微控制器 ……………………… 30
一、什么是微控制器 ……………………………………30
二、单片机的特点与应用 ………………………………31
三、单片机的最小系统 …………………………………32
第二节 Arduino控制器平台 …………………… 36
一、认识Arduino平台主要硬件 …………………………36
二、编写Arduino程序 ……………………………………37
第三节 一体化控制器 ………………………… 41
一、认识一体化控制器硬件 ……………………………41
二、编写控制器程序 ……………………………………42
综合学习活动 …………………………………… 47
本章回顾与评价 ………………………………… 48
第四章 机器人感知与传感器……………… 49
第一节 机器人的感知 ………………………… 50
一、机器感知与传感器 …………………………………50
二、感知原理与方法 ……………………………………51
第二节 机器人的传感器 ……………………… 54
一、常用传感器 …………………………………………54
二、传感器与接口电路 …………………………………56
三、机器人传感器的安装与调试 ………………………57
第三节 带感知机器人的设计与制作 ………… 61
一、传感器的选择与应用 ………………………………61
二、带外界感知的轮式机器人的制作与编程 …………63
综合学习活动 …………………………………… 71
本章回顾与评价 ………………………………… 72
第五章 机器人的控制与制作……………… 73
第一节 机器人的路径规划和运动控制 ……… 74
第二节 机器人的控制与制作活动 …………… 76
一、自动循迹机器人的制作 ……………………………76
二、自动返回机器人的制作 ……………………………80
三、避障机器人的制作 …………………………………87
综合学习活动 …………………………………… 89
本章回顾与评价 ………………………………… 90
2一
第 章
人与机器人
机器人是一种能够按照预先设计程序而自动执行工作的机械装置。当前机器人已经大规模地
走进工业生产、军事、政府管理、商业应用等领域,它们可以帮助或代替人类完成不同的工作,
在各个方面影响着人类的生活。通过本章的学习,让我们来初步了解和认识机器人吧。通用技术 选择性必修2 机器人设计与制作
一、什么是机器人
(一)机器人发展历史
机器人(Robot)一词最早是在捷克剧作家卡雷尔·卡佩克的科幻剧本《罗萨姆的万
能机器人》中出现的。
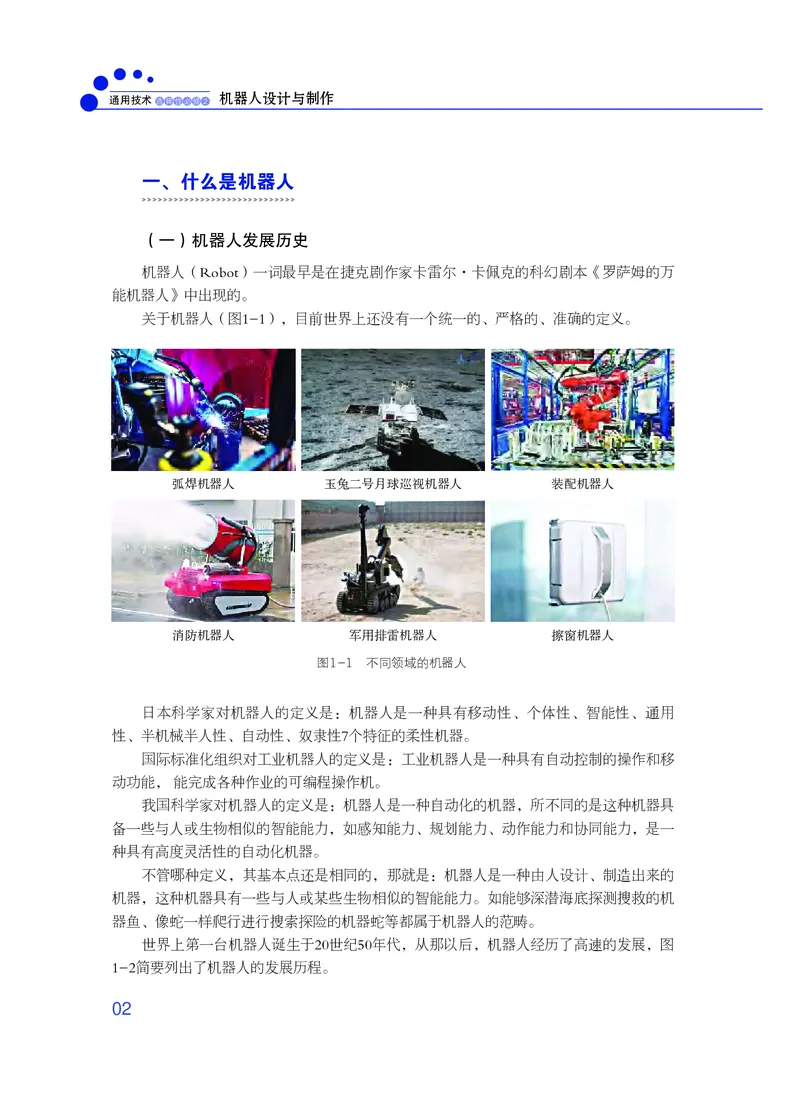
关于机器人(图1-1),目前世界上还没有一个统一的、严格的、准确的定义。
弧焊机器人 玉兔二号月球巡视机器人 装配机器人
消防机器人 军用排雷机器人 擦窗机器人
图1-1 不同领域的机器人
日本科学家对机器人的定义是:机器人是一种具有移动性、个体性、智能性、通用
性、半机械半人性、自动性、奴隶性7个特征的柔性机器。
国际标准化组织对工业机器人的定义是:工业机器人是一种具有自动控制的操作和移
动功能, 能完成各种作业的可编程操作机。
我国科学家对机器人的定义是:机器人是一种自动化的机器,所不同的是这种机器具
备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一
种具有高度灵活性的自动化机器。
不管哪种定义,其基本点还是相同的,那就是:机器人是一种由人设计、制造出来的
机器,这种机器具有一些与人或某些生物相似的智能能力。如能够深潜海底探测搜救的机
器鱼、像蛇一样爬行进行搜索探险的机器蛇等都属于机器人的范畴。
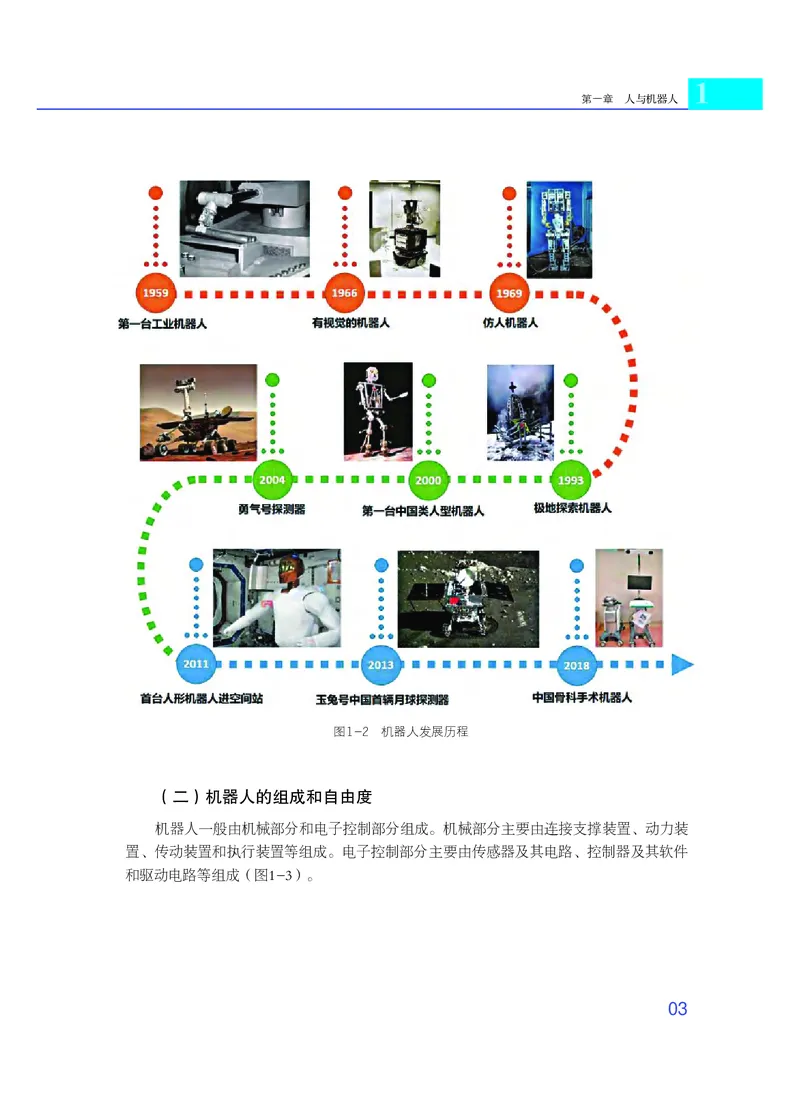
世界上第一台机器人诞生于20世纪50年代,从那以后,机器人经历了高速的发展,图
1-2简要列出了机器人的发展历程。
0021
第一章 人与机器人
图1-2 机器人发展历程
(二)机器人的组成和自由度
机器人一般由机械部分和电子控制部分组成。机械部分主要由连接支撑装置、动力装
置、传动装置和执行装置等组成。电子控制部分主要由传感器及其电路、控制器及其软件
和驱动电路等组成(图1-3)。
003通用技术 选择性必修2 机器人设计与制作
动力装置
连
接
支
机械部分 传动装置
撑
装
置
执行装置
机器人
传感器及其电路
电子控制部分 控制器及其软件
驱动电路
图1-3 机器人的组成
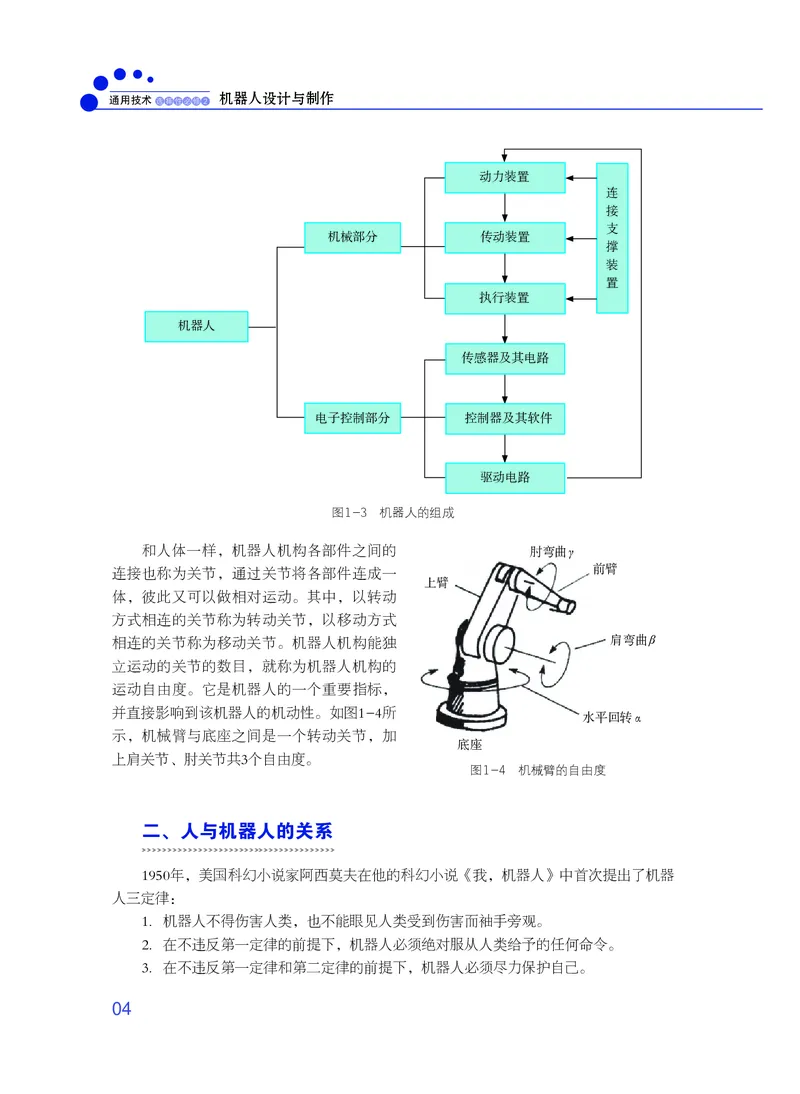
和人体一样,机器人机构各部件之间的 肘弯曲γ
连接也称为关节,通过关节将各部件连成一 前臂
上臂
体,彼此又可以做相对运动。其中,以转动
方式相连的关节称为转动关节,以移动方式
相连的关节称为移动关节。机器人机构能独 肩弯曲β
立运动的关节的数目,就称为机器人机构的
运动自由度。它是机器人的一个重要指标,
并直接影响到该机器人的机动性。如图1-4所
水平回转α
示,机械臂与底座之间是一个转动关节,加
底座
上肩关节、肘关节共3个自由度。
图1-4 机械臂的自由度
二、人与机器人的关系
1950年,美国科幻小说家阿西莫夫在他的科幻小说《我,机器人》中首次提出了机器
人三定律:
1.机器人不得伤害人类,也不能眼见人类受到伤害而袖手旁观。
2.在不违反第一定律的前提下,机器人必须绝对服从人类给予的任何命令。
3.在不违反第一定律和第二定律的前提下,机器人必须尽力保护自己。
0041
第一章 人与机器人
此后,随着科学技术的发展和人们对机器人智能化本质认识的加深,对以人为本的
人机关系研究不断突破,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这
些领域的应用特点,人们设计制造了各式各样的具有感知、决策、行动和交互能力的机器
人,如水下机器人、医疗机器人、军用机器人、空间机器人、娱乐机器人等。
机器人(图1-5)代替人们完成了很多人类难以实现的工作,如火星探测机器人、深
海作业机器人等;帮助人们完成了很多高危险性的工作,如排雷机器人、侦察机器人等。
胶囊微型机器人 机器狗 “好奇号”火星探测机器人
仓库机器人 水下机器人 侦察机器人
图1-5 不同任务的机器人
综合学习活动
1.请大家举一些自己熟知的机器人例子,说说机器人在哪些方面应用广泛,并加以
讨论。
2.实地参观或观看机器人应用视频,了解机器人的工作过程,利用已学过的知识,
试分析机器人与人类及环境的关系。
005通用技术 选择性必修2 机器人设计与制作
本章回顾与评价
一、学习内容梳理
TA ET TA
1 什么是机器人 人与机器人 2 人与机器人的关系
说明:TA—技术意识,ET—工程思维
二、学习评价
评价方式
评价内容
自评 互评 师评
了解机器人的发展历程
了解机器人的组成
了解人与机器人的关系
说明:A—优秀,B—良好,C—合格,D—待改进
通过本章的学习,你的核心素养得到了哪些发展?
006二
第 章
机器人的传动机械
机械部分是机器人重要的组成部分,它能通过传动装置,将动力装置产生的运动和力传递到
执行装置的移动机构和手爪机构,实现行走和抓取。机器人中的传动装置是机械传动。在各种高
新技术飞速发展的今天,我们的日常生活和工农业生产都离不开机械传动。让我们通过本章的学
习来了解和初步掌握机械传动的知识和应用吧。通用技术 选择性必修2 机器人设计与制作
一
第 节 机器人的机械部分
学习目标
了解机器人的机械部分。
了解传动机械。
情景
当大家看到前面一页那只灵巧的机械手抓住鸡蛋的时候,是否会思考,机械
手是如何完成这个动作的呢?其实,这是在控制电路的控制下,以直流电机提供动
力,通过带传动和齿轮传动,用特制的手指来实现抓住鸡蛋的动作。这里所涉及的
直流电机、带传动和齿轮传动、特制的手指及起支撑作用的两块特定形状板就是机
械手的机械部分。
一、机械部分的组成
任务
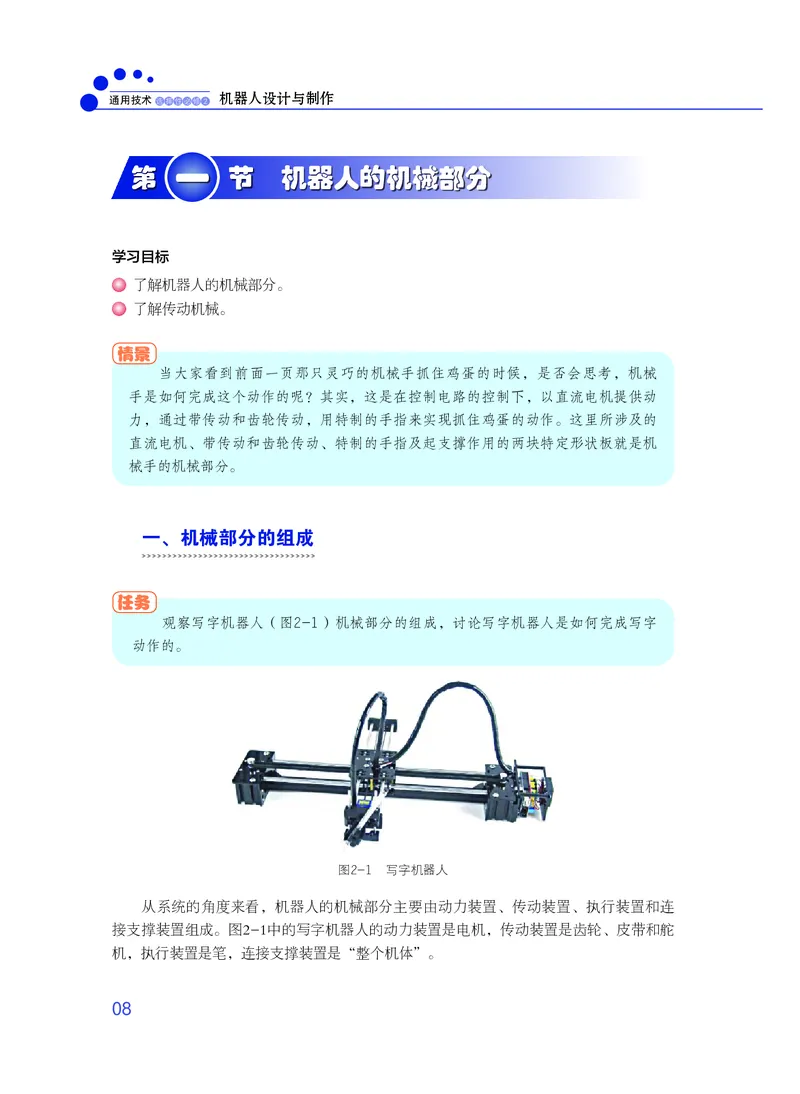
观察写字机器人(图2-1)机械部分的组成,讨论写字机器人是如何完成写字
动作的。
图2-1 写字机器人
从系统的角度来看,机器人的机械部分主要由动力装置、传动装置、执行装置和连
接支撑装置组成。图2-1中的写字机器人的动力装置是电机,传动装置是齿轮、皮带和舵
机,执行装置是笔,连接支撑装置是“整个机体”。
0082
第二章 机器人的传动机械
立即行动
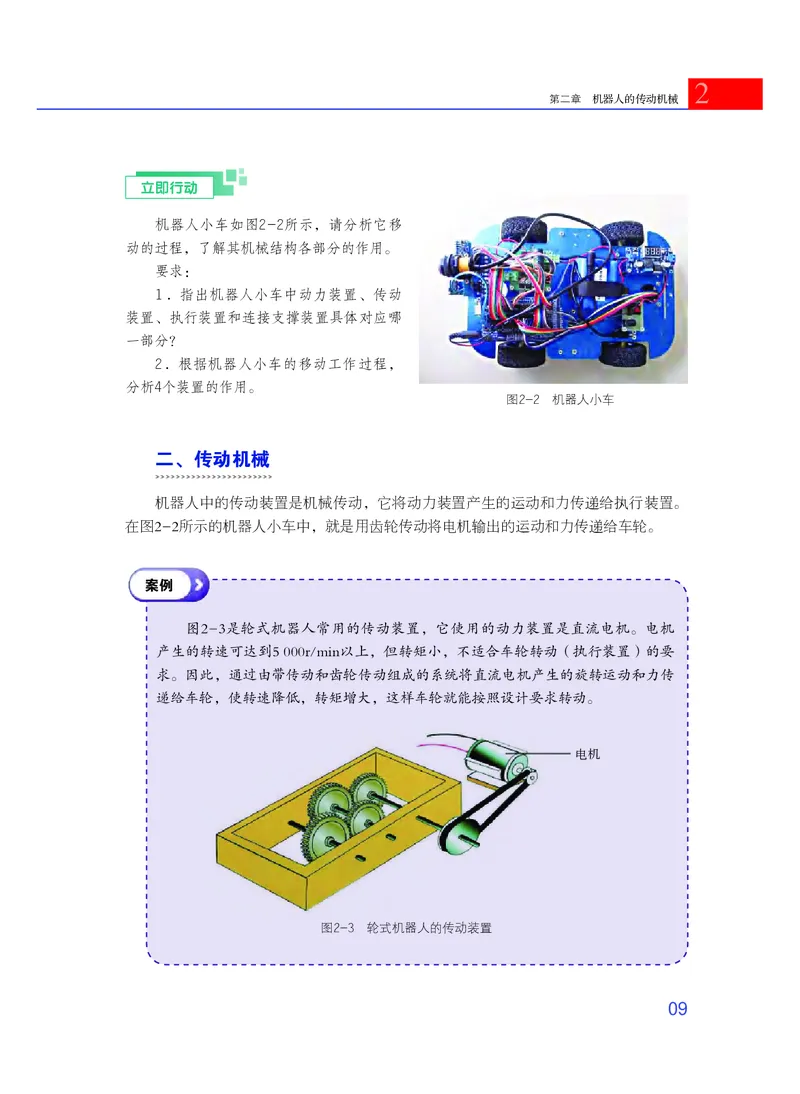
机器人小车如图2-2所示,请分析它移
动的过程,了解其机械结构各部分的作用。
要求:
1.指出机器人小车中动力装置、传动
装置、执行装置和连接支撑装置具体对应哪
一部分?
2.根据机器人小车的移动工作过程,
分析4个装置的作用。
图2-2 机器人小车
二、传动机械
机器人中的传动装置是机械传动,它将动力装置产生的运动和力传递给执行装置。
在图2-2所示的机器人小车中,就是用齿轮传动将电机输出的运动和力传递给车轮。
案例
图2-3是轮式机器人常用的传动装置,它使用的动力装置是直流电机。电机
产生的转速可达到5 000r/min以上,但转矩小,不适合车轮转动(执行装置)的要
求。因此,通过由带传动和齿轮传动组成的系统将直流电机产生的旋转运动和力传
递给车轮,使转速降低,转矩增大,这样车轮就能按照设计要求转动。
电机
图2-3 轮式机器人的传动装置
009通用技术 选择性必修2 机器人设计与制作
机械传动不但可以传递运动和力,而且还可以改变运动的速度、方向和运动的形
式,如使旋转运动变为直线运动等。
实践
观察自行车的传动装置。把你观察和分析的情况填写到表2-1中。
将自行车的车座、车把朝下倒置过来,用布垫在车座和车把的下面,以免自行车受损。
1.转动踏板,仔细观察自行车的传动结构,了解自行车有哪些传动机械类型。
2.分析自行车传动机械的零部件组成及其功能。
表2-1 自行车传动装置组成零部件及功能分析
自行车的传动类型 组成零部件 功能分析
交流
观察普通自行车和变速自行车(图2-4)的区
别,观察变速自行车变速时后齿轮的变化情况,并与
同学进行交流分享。
图2-4 变速自行车
习 题
1.扳手是我们生活中常用的安装与拆卸工具,下图是一个活动扳手,请结合所学的
知识,分析扳手上的螺纹螺栓的作用是什么?
第1题图
2.请大家举一些能改变运动的速度、运动的方向或运动的形式的例子,并加以讨论。
0102
第二章 机器人的传动机械
二
第 节 齿轮传动和平面连杆机构
学习目标
了解齿轮和齿轮系传动,能计算简单的齿轮传动比,按照装配图样安装和调试简单的
齿轮装置。
正确分析常见连杆传动装置的结构及其应用,并根据需求设计和制作简单的连杆装置。
情景
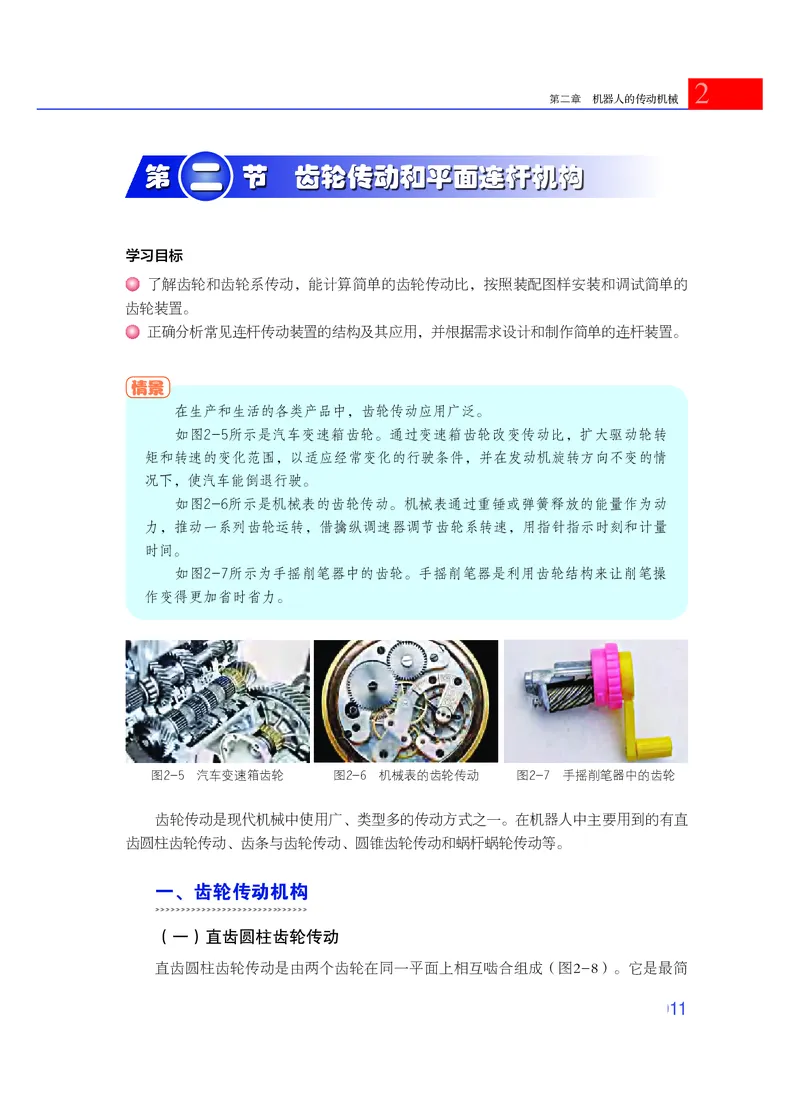
在生产和生活的各类产品中,齿轮传动应用广泛。
如图2-5所示是汽车变速箱齿轮。通过变速箱齿轮改变传动比,扩大驱动轮转
矩和转速的变化范围,以适应经常变化的行驶条件,并在发动机旋转方向不变的情
况下,使汽车能倒退行驶。
如图2-6所示是机械表的齿轮传动。机械表通过重锤或弹簧释放的能量作为动
力,推动一系列齿轮运转,借擒纵调速器调节齿轮系转速,用指针指示时刻和计量
时间。
如图2-7所示为手摇削笔器中的齿轮。手摇削笔器是利用齿轮结构来让削笔操
作变得更加省时省力。
图2-5 汽车变速箱齿轮 图2-6 机械表的齿轮传动 图2-7 手摇削笔器中的齿轮
齿轮传动是现代机械中使用广、类型多的传动方式之一。在机器人中主要用到的有直
齿圆柱齿轮传动、齿条与齿轮传动、圆锥齿轮传动和蜗杆蜗轮传动等。
一、齿轮传动机构
(一)直齿圆柱齿轮传动
直齿圆柱齿轮传动是由两个齿轮在同一平面上相互啮合组成(图2-8)。它是最简
011通用技术 选择性必修2 机器人设计与制作
单、最基本、应用最广泛的一种齿轮传动方式。
从动轮
电机
主动轮 10齿 20齿
图2-8 电机驱动的直齿圆柱齿轮传动装置
在图2-8中,作为主动轮的小齿轮固定在电机的转轴上,与它啮合的大齿轮为从动
轮。当小齿轮随电机转动时,由于两个齿轮之间是逐齿啮合,小齿轮转动一周,大齿轮转
动半周,形成一个减速传动,这个装置的传动比为2。
直齿圆柱齿轮传动的传动比公式:
从动轮的齿数
传动比=
主动轮的齿数
在图2-8中,从动轮(大齿轮)的旋转方向与主动轮相反,其转矩增加。如果将电机
固定在大齿轮上,那么大齿轮就是主动轮,此时,小齿轮的转速增加,转矩减少,这样的
齿轮传动就是增速传动。
立即行动
图2-9是机器人中的两组齿轮传动。左边的一组中,小齿轮是主动轮;右边的一组
中,大齿轮是主动轮。请分析这两组齿轮传动的转速和转矩变化,计算它们的传动比,并
填写到表2-2中。
图2-9 机器人中的齿轮传动
表2-2 两组齿轮传动的转速和转矩变化及传动比
分 析 组 别 转速和转矩变化 传 动 比
左边一组
右边一组
0122
第二章 机器人的传动机械
(二)齿条与齿轮传动
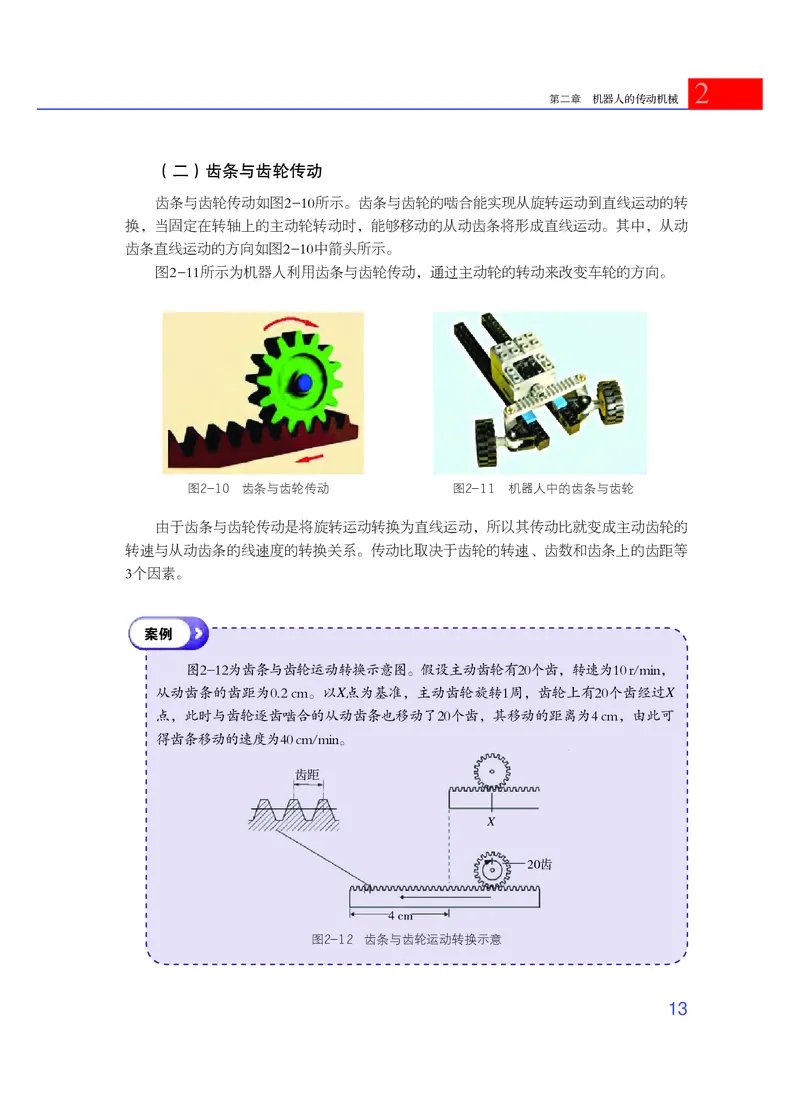
齿条与齿轮传动如图2-10所示。齿条与齿轮的啮合能实现从旋转运动到直线运动的转
换,当固定在转轴上的主动轮转动时,能够移动的从动齿条将形成直线运动。其中,从动
齿条直线运动的方向如图2-10中箭头所示。
图2-11所示为机器人利用齿条与齿轮传动,通过主动轮的转动来改变车轮的方向。
图2-10 齿条与齿轮传动 图2-11 机器人中的齿条与齿轮
由于齿条与齿轮传动是将旋转运动转换为直线运动,所以其传动比就变成主动齿轮的
转速与从动齿条的线速度的转换关系。传动比取决于齿轮的转速、齿数和齿条上的齿距等
3个因素。
案例
图2-12为齿条与齿轮运动转换示意图。假设主动齿轮有20个齿,转速为10 r/min,
从动齿条的齿距为0.2 cm。以X点为基准,主动齿轮旋转1周,齿轮上有20个齿经过X
点,此时与齿轮逐齿啮合的从动齿条也移动了20个齿,其移动的距离为4 cm,由此可
得齿条移动的速度为40 cm/min。
齿距
X
20齿
4 cm
图2-12 齿条与齿轮运动转换示意
013通用技术 选择性必修2 机器人设计与制作
(三)圆锥齿轮传动和蜗杆蜗轮传动
当我们需要传递两交叉轴(交叉角一般为直角)之间的运动和动力时,经常会使用到
圆锥齿轮传动(图2-13a)和蜗杆蜗轮传动(图2-13b)。通过这两种传动方式,可以轻松
地改变动力输出的方向,实现多种巧妙的设计。例如汽车在转弯时,因为左、右两个车轮
的转速不同,需要用到圆锥齿轮构成的差速器。同样,在机器人中也会使用到差速器(图
2-13c)。
a b c
图2-13 机器人中的传动装置
(四)齿轮系
前面已经讨论了各种齿轮传动,其传动
形式都很简单,然而实际的机械传动往往很
复杂。在主动轴与从动轴的距离较远、要求
较大传动比及多方向变换等情况下,仅用一
对齿轮传动或蜗杆蜗轮传动是不够的,必须
通过一系列相互啮合的齿轮组成的传动装
置将主动轴的运动传递到从动轴。这种由
一系列互相啮合的齿轮组成的传动装置称为
齿轮系,图2-14所示是齿轮系在机器人中的
应用。 图2-14 齿轮系在机器人中的应用
案例
图2-15所示的是由4个直齿圆柱齿轮组成的齿轮系,其中齿轮B和齿轮C固定在
同一个轴上,齿轮A为主动轮,齿轮D为末端从动轮。
0142
第二章 机器人的传动机械
D
B
D C A
B
C A
图2-15 齿轮系
当齿轮A转动时,与它啮合的齿轮B做减速转动。同时,在同一个轴上的齿轮C
与齿轮B转速相同,而与齿轮C啮合的末端从动齿轮D也做减速转动。它的传动比为
下面的公式:
B的齿数 D的齿数
传动比= ×
A的齿数 C的齿数
该齿轮系中齿轮A与齿轮B的转动方向相反,而与齿轮D的转动方向相同。
齿轮系传动比,即齿轮系中首轮与末轮的角速度或转速之比。进行齿轮系传动比计算
时,除计算传动比大小以外,一般还要确定首轮、末轮的转向关系。
实践
图2-16为四驱车模型的齿轮传动装置,按照装配图组装简单的齿轮系统。经历装配
和调试的全过程,进一步了解齿轮传动装置。
图2-16 四驱车模型的齿轮传动装置
齿轮传动机构的特点是能保证恒定不变的传动比,传动效率高、结构紧凑、工作可
靠、使用寿命长。然而也存在制造及安装精度要求高、价格较贵、不宜用于两轴间距离较
大的场合等缺点。
015通用技术 选择性必修2 机器人设计与制作
二、平面连杆机构
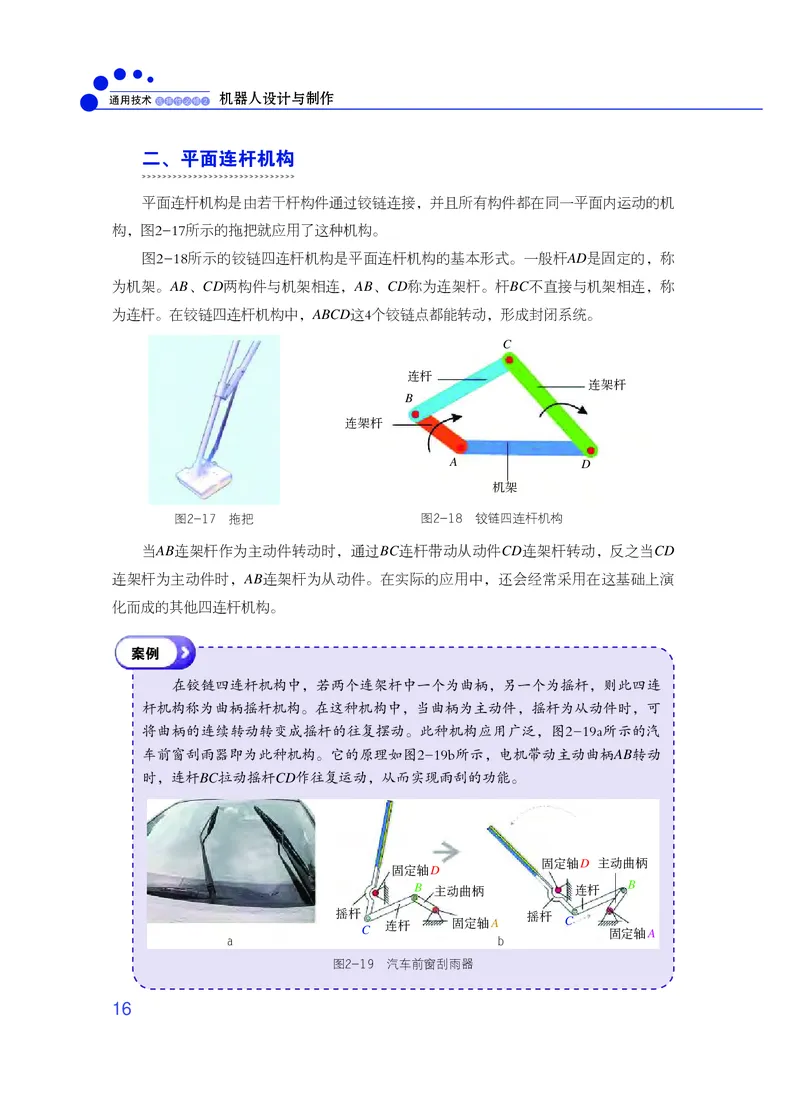
平面连杆机构是由若干杆构件通过铰链连接,并且所有构件都在同一平面内运动的机
构,图2-17所示的拖把就应用了这种机构。
图2-18所示的铰链四连杆机构是平面连杆机构的基本形式。一般杆AD是固定的,称
为机架。AB、CD两构件与机架相连,AB、CD称为连架杆。杆BC不直接与机架相连,称
为连杆。在铰链四连杆机构中,ABCD这4个铰链点都能转动,形成封闭系统。
C
连杆
连架杆
B
连架杆
A D
机架
图2-17 拖把 图2-18 铰链四连杆机构
当AB连架杆作为主动件转动时,通过BC连杆带动从动件CD连架杆转动,反之当CD
连架杆为主动件时,AB连架杆为从动件。在实际的应用中,还会经常采用在这基础上演
化而成的其他四连杆机构。
案例
在铰链四连杆机构中,若两个连架杆中一个为曲柄,另一个为摇杆,则此四连
杆机构称为曲柄摇杆机构。在这种机构中,当曲柄为主动件,摇杆为从动件时,可
将曲柄的连续转动转变成摇杆的往复摆动。此种机构应用广泛,图2-19a所示的汽
车前窗刮雨器即为此种机构。它的原理如图2-19b所示,电机带动主动曲柄AB转动
时,连杆BC拉动摇杆CD作往复运动,从而实现雨刮的功能。
固定轴D 主动曲柄
固定轴D
B 主动曲柄 连杆 B
摇杆 摇杆
连杆 固定轴A C
C 固定轴A
a b
图2-19 汽车前窗刮雨器
0162
第二章 机器人的传动机械
立即行动
观察图2-20所示的挖掘机,找出哪些地方使用了连杆机
构,然后分析这些连杆机构是如何工作的,对挖掘机实现功
能有什么作用。
图2-20 挖掘机
案例
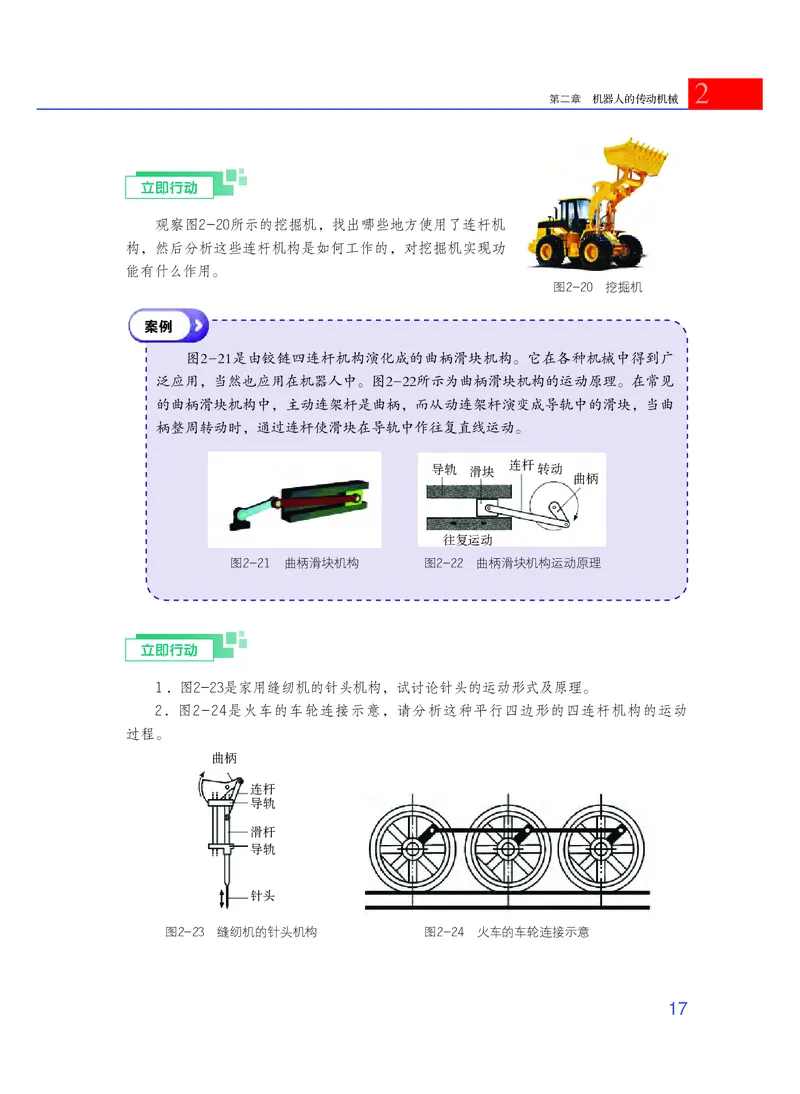
图2-21是由铰链四连杆机构演化成的曲柄滑块机构。它在各种机械中得到广
泛应用,当然也应用在机器人中。图2-22所示为曲柄滑块机构的运动原理。在常见
的曲柄滑块机构中,主动连架杆是曲柄,而从动连架杆演变成导轨中的滑块,当曲
柄整周转动时,通过连杆使滑块在导轨中作往复直线运动。
连杆
导轨 滑块 转动
曲柄
往复运动
图2-21 曲柄滑块机构 图2-22 曲柄滑块机构运动原理
立即行动
1.图2-23是家用缝纫机的针头机构,试讨论针头的运动形式及原理。
2.图2-24是火车的车轮连接示意,请分析这种平行四边形的四连杆机构的运动
过程。
曲柄
连杆
导轨
滑杆
导轨
针头
图2-23 缝纫机的针头机构 图2-24 火车的车轮连接示意
017通用技术 选择性必修2 机器人设计与制作
在实际中,四连杆机构形式多样,应用广泛,它们都可以认为是由四连杆机构的基本
形式演化而来的。从上述案例和讨论中,我们了解到,四连杆机构的各种演化机构外形虽
然各不相同,但是它们的运动性质及分析和设计方法却常常是相同或类似的。
由于平面连杆机构中两构件之间的铰链为面接触,因而承受的压强小、便于润滑、磨
损较轻,可以承受较大的载荷,而且构件形状简单,加工方便,工作可靠。但铰链在面
接触时存在间隙,会引起运动误差,不易实现精确的复杂运动。连杆机构不适用于高速
场合。
实践
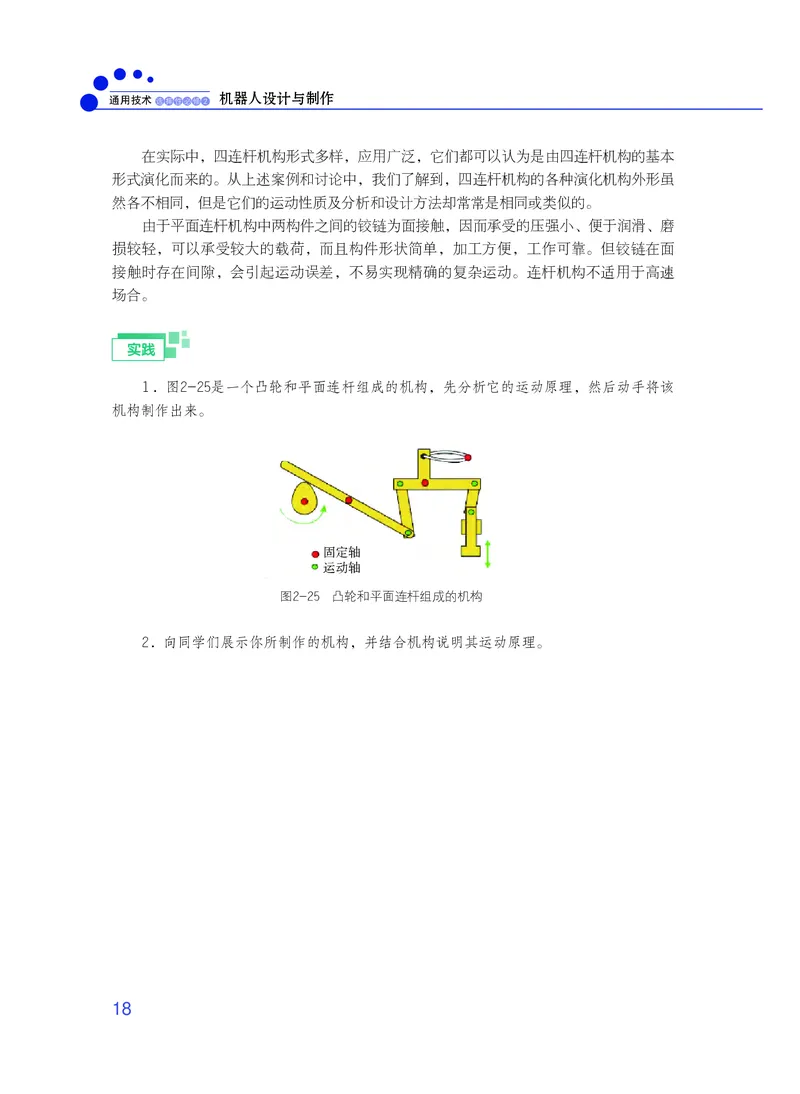
1.图2-25是一个凸轮和平面连杆组成的机构,先分析它的运动原理,然后动手将该
机构制作出来。
固定轴
运动轴
图2-25 凸轮和平面连杆组成的机构
2.向同学们展示你所制作的机构,并结合机构说明其运动原理。
0182
第二章 机器人的传动机械
三
第 节 机器人的机械设计
学习目标
掌握机器人机械结构的初步设计方法。
初步学会机器人机械部分的搭建。
情景
图2-26是一种由固定支撑体和机械手组成的工业机器人,图2-27是一种由移动
的履带、实现操作的机械手和支撑体组成的排障机器人。这些机器人的手爪机构和
移动机构是如何设计的呢?
图2-26 工业机器人 图2-27 排障机器人
本节我们将通过原理学习,了解机器人机械结构的设计方法。学习用的机器人一般有
固定形式(图2-28)和拼装形式(图2-29),通过学习,尝试进行机器人机械结构的设
计搭建。
图2-28 固定形式的机器人 图2-29 拼装形式的机器人
019通用技术 选择性必修2 机器人设计与制作
一、机器人的移动机构
目前,机器人移动机构的主要方式有履带式、轮式和足式等(图2-30)。
a. 履带式 b. 轮式 c. 足式
图2-30 机器人移动机构的主要方式
机器人移动机构的动力一般来源于直流电机。根据对机器人行走功能的要求,可以利
用前面我们已经学过的各种机械传动和机构,将直流电机产生的旋转运动转变为移动机构
所需要的各种运动形式。
实践
机器人移动机构的分析和实现
(1)分析和讨论采用齿轮传动的四轮机器人是如何行走的。
(2)分析和讨论采用平面四连杆机构的足式机器人是如何行走的。
(3)设计和制作六足机器人。
方法指导
1.齿轮传动四轮形式(图2-31)的机器人
齿轮传动四轮形式是机器人行走的常用形式。它的动力一般是直流电机,通过一组齿
电机
电机
a b
图2-31 齿轮传动的四轮形式
0202
第二章 机器人的传动机械
轮系,将电机产生的转动传递给驱动轮,使车行走。
讨论
(1)电机驱动的是哪两个轮子?
(2)齿轮传动是如何将电机的转动传递给车轮的?
(3)图2-31a的车能够执行什么运动?
(4)将图2-31a中主动轮的轴改为差速齿轮系统(图2-31b),将使车的运动发生什
么变化?
2.平面四连杆机构的足式机器人
足式机器人实际上就是模仿生物行走或爬行。当用轮子行走时,轮子一般不会离开地
面,而用足行走时却需要离开地面。如何才能实现呢?
当一只足离开地面时,其他足必须
使机器人保持平衡,这是足式机器人行
走时需要解决的关键问题。图2-32是
一种足的基本结构,它的运动轨迹是一
个椭圆。当这个机器人的足离地后,为
保持机器人的平衡,必须采用支撑结构
图2-32 一种足的基本结构
(在图中足的后面)。
我们以较复杂的四连杆足为例,进一步进行分析和讨论。
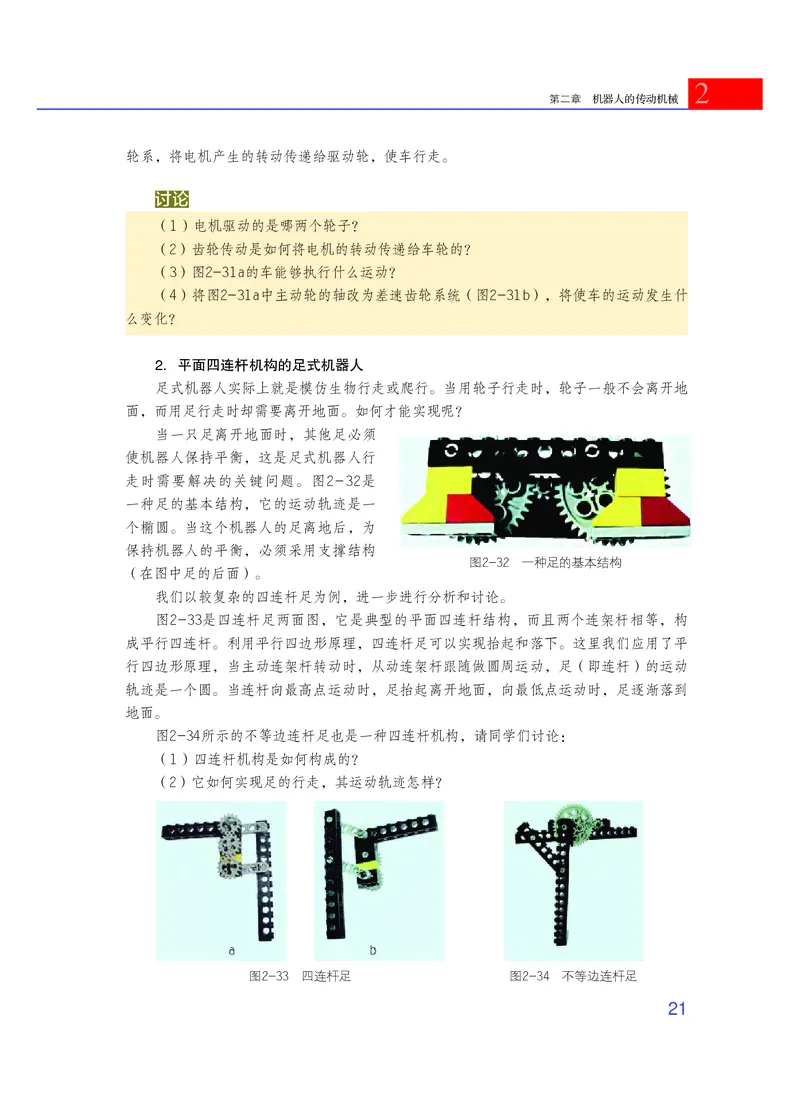
图2-33是四连杆足两面图,它是典型的平面四连杆结构,而且两个连架杆相等,构
成平行四连杆。利用平行四边形原理,四连杆足可以实现抬起和落下。这里我们应用了平
行四边形原理,当主动连架杆转动时,从动连架杆跟随做圆周运动,足(即连杆)的运动
轨迹是一个圆。当连杆向最高点运动时,足抬起离开地面,向最低点运动时,足逐渐落到
地面。
图2-34所示的不等边连杆足也是一种四连杆机构,请同学们讨论:
(1)四连杆机构是如何构成的?
(2)它如何实现足的行走,其运动轨迹怎样?
图2-33 四连杆足 图2-34 不等边连杆足
021通用技术 选择性必修2 机器人设计与制作
3.设计和制作六足机器人
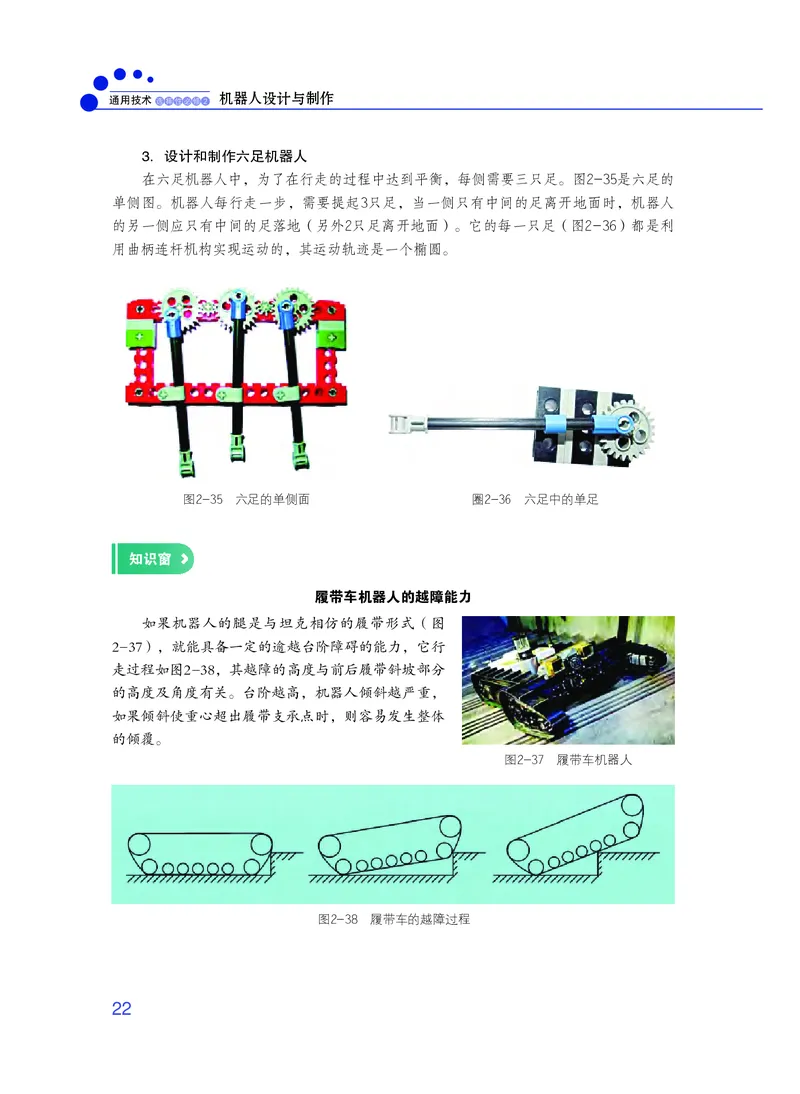
在六足机器人中,为了在行走的过程中达到平衡,每侧需要三只足。图2-35是六足的
单侧图。机器人每行走一步,需要提起3只足,当一侧只有中间的足离开地面时,机器人
的另一侧应只有中间的足落地(另外2只足离开地面)。它的每一只足(图2-36)都是利
用曲柄连杆机构实现运动的,其运动轨迹是一个椭圆。
图2-35 六足的单侧面 圈2-36 六足中的单足
知识窗
履带车机器人的越障能力
如果机器人的腿是与坦克相仿的履带形式(图
2-37),就能具备一定的逾越台阶障碍的能力,它行
走过程如图2-38,其越障的高度与前后履带斜坡部分
的高度及角度有关。台阶越高,机器人倾斜越严重,
如果倾斜使重心超出履带支承点时,则容易发生整体
的倾覆。
图2-37 履带车机器人
图2-38 履带车的越障过程
0222
第二章 机器人的传动机械
二、机器人的手爪机构
根据机器人功能的不同,其操作装置也不相同。
机器人的手爪如图2-39所示。
在机器人中,手爪的抓取功能也可以利用我们前
面已经学过的各种机械传动和机构来实现,手爪的运
动同样是将直流电机产生的旋转运动转变为所需要的
各种运动方式。
图2-39 机器人的手爪
实践
手爪机构的分析与制作
(1)通过分析和讨论了解手爪实现抓取的方法,掌握已学过的各种机械传动和机构
的应用。
(2)实现手爪简单的抓取操作,了解实现的过程,学会发现问题和解决问题。
方法指导
1.不同的手爪机构
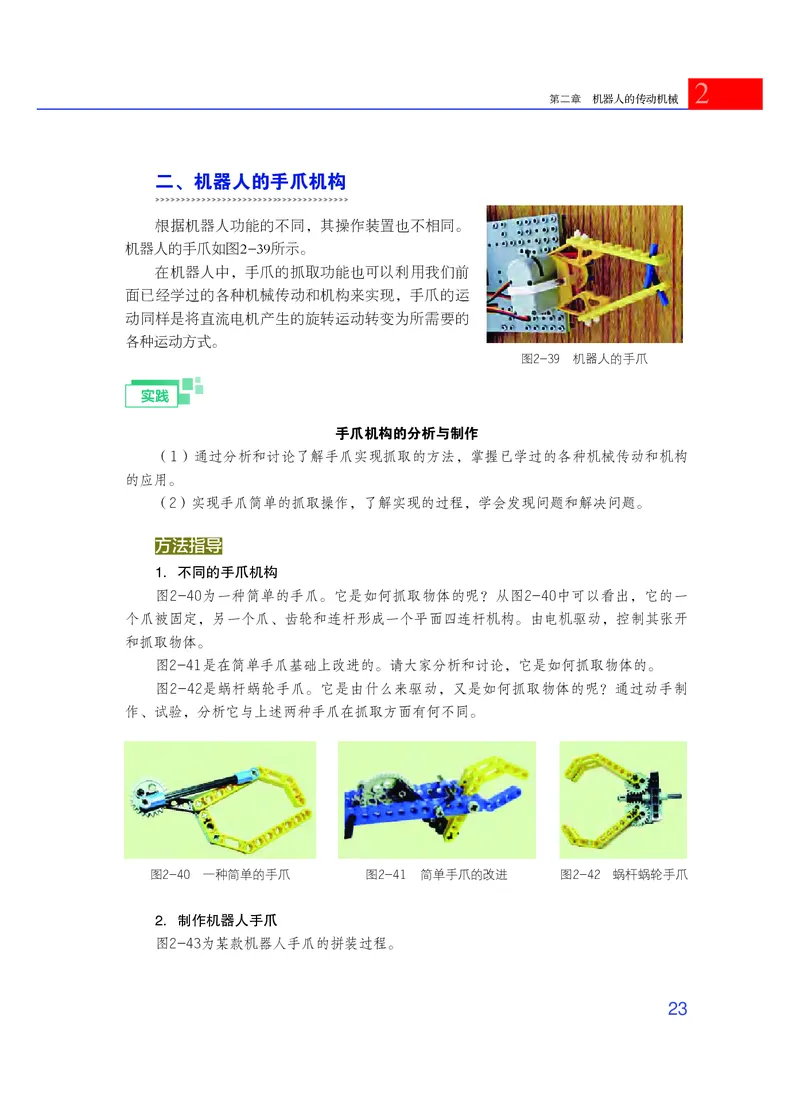
图2-40为一种简单的手爪。它是如何抓取物体的呢?从图2-40中可以看出,它的一
个爪被固定,另一个爪、齿轮和连杆形成一个平面四连杆机构。由电机驱动,控制其张开
和抓取物体。
图2-41是在简单手爪基础上改进的。请大家分析和讨论,它是如何抓取物体的。
图2-42是蜗杆蜗轮手爪。它是由什么来驱动,又是如何抓取物体的呢?通过动手制
作、试验,分析它与上述两种手爪在抓取方面有何不同。
图2-40 一种简单的手爪 图2-41 简单手爪的改进 图2-42 蜗杆蜗轮手爪
2.制作机器人手爪
图2-43为某款机器人手爪的拼装过程。
023通用技术 选择性必修2 机器人设计与制作
图2-43 机器人手爪的拼装过程
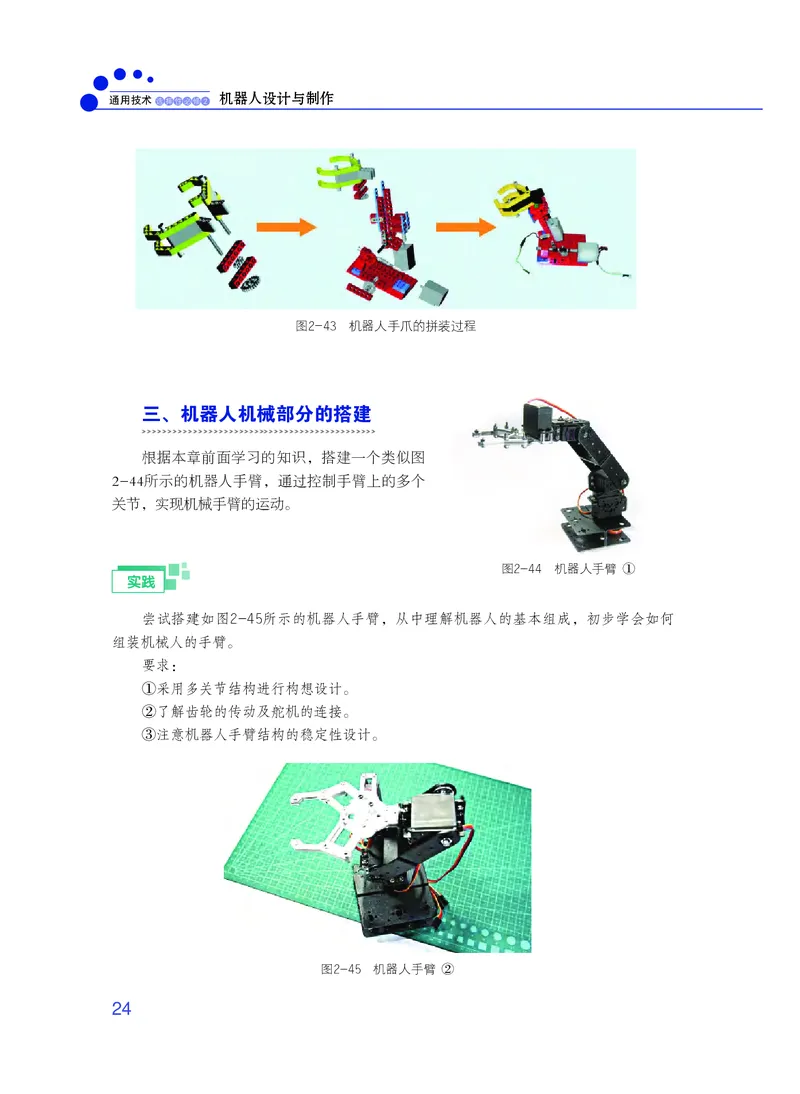
三、机器人机械部分的搭建
根据本章前面学习的知识,搭建一个类似图
2-44所示的机器人手臂,通过控制手臂上的多个
关节,实现机械手臂的运动。
图2-44 机器人手臂 ①
实践
尝试搭建如图2-45所示的机器人手臂,从中理解机器人的基本组成,初步学会如何
组装机械人的手臂。
要求:
①采用多关节结构进行构想设计。
②了解齿轮的传动及舵机的连接。
③注意机器人手臂结构的稳定性设计。
图2-45 机器人手臂 ②
0242
第二章 机器人的传动机械
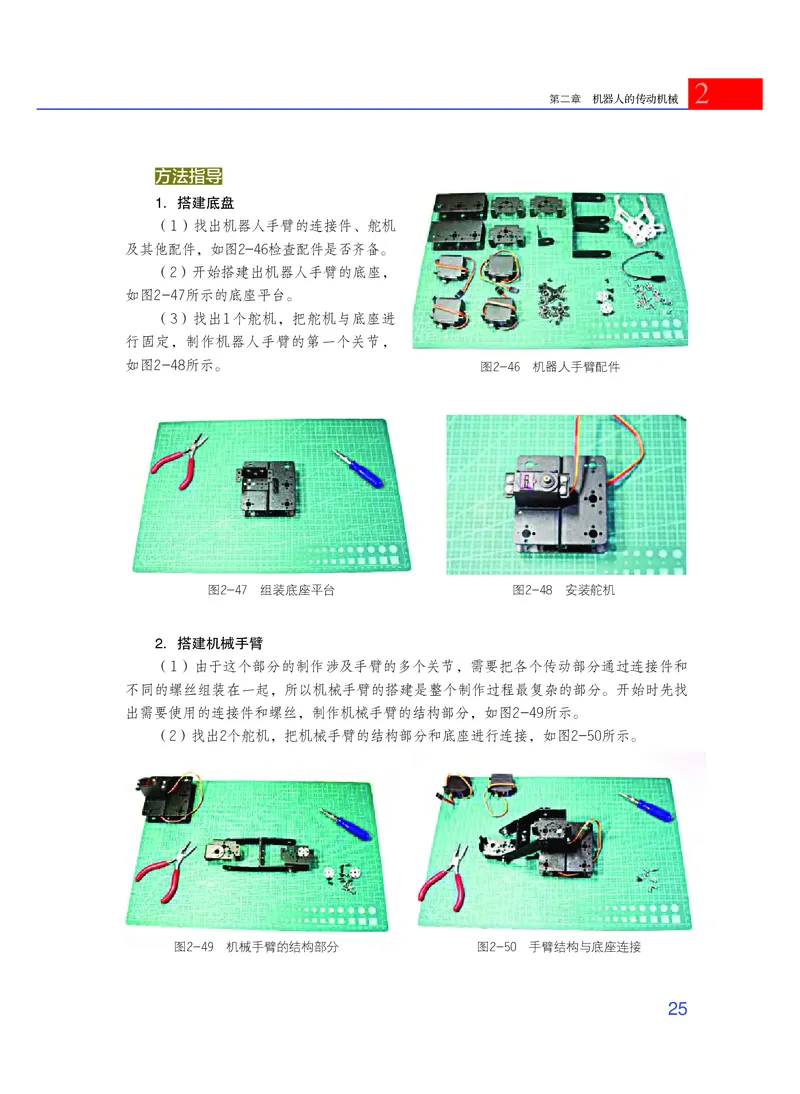
方法指导
1.搭建底盘
(1)找出机器人手臂的连接件、舵机
及其他配件,如图2-46检查配件是否齐备。
(2)开始搭建出机器人手臂的底座,
如图2-47所示的底座平台。
(3)找出1个舵机,把舵机与底座进
行固定,制作机器人手臂的第一个关节,
如图2-48所示。 图2-46 机器人手臂配件
图2-47 组装底座平台 图2-48 安装舵机
2.搭建机械手臂
(1)由于这个部分的制作涉及手臂的多个关节,需要把各个传动部分通过连接件和
不同的螺丝组装在一起,所以机械手臂的搭建是整个制作过程最复杂的部分。开始时先找
出需要使用的连接件和螺丝,制作机械手臂的结构部分,如图2-49所示。
(2)找出2个舵机,把机械手臂的结构部分和底座进行连接,如图2-50所示。
图2-49 机械手臂的结构部分 图2-50 手臂结构与底座连接
025通用技术 选择性必修2 机器人设计与制作
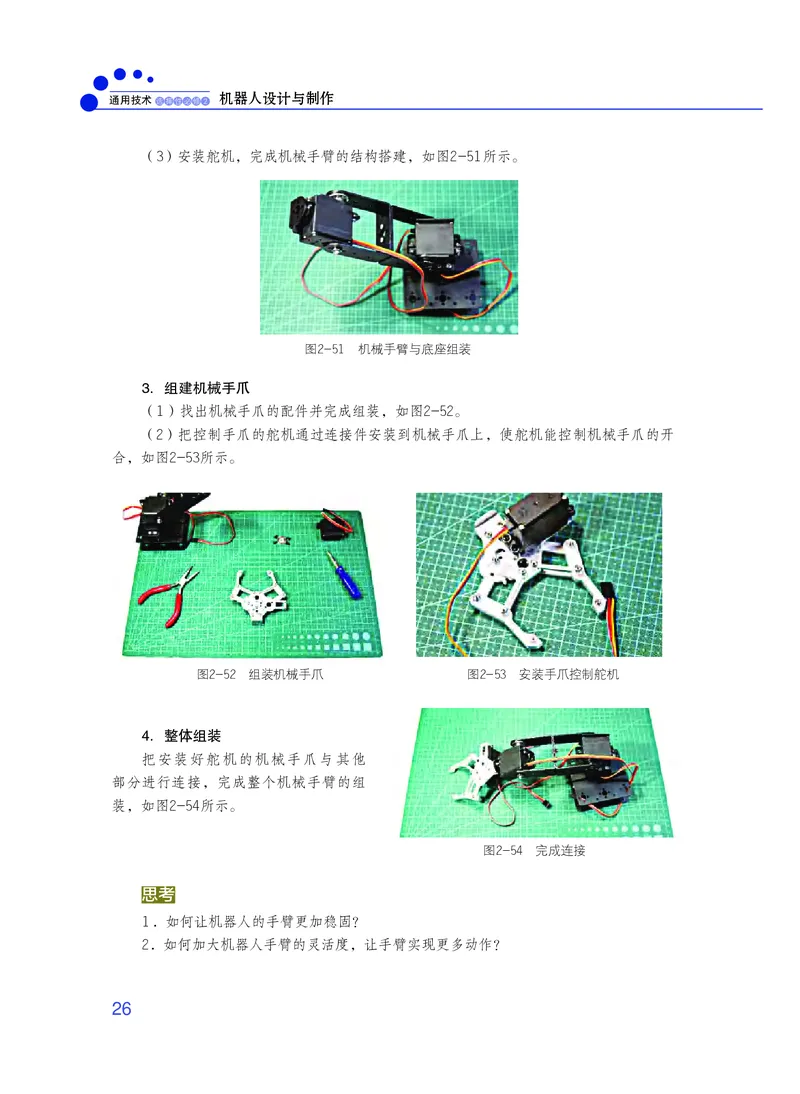
(3)安装舵机,完成机械手臂的结构搭建,如图2-51所示。
图2-51 机械手臂与底座组装
3.组建机械手爪
(1)找出机械手爪的配件并完成组装,如图2-52。
(2)把控制手爪的舵机通过连接件安装到机械手爪上,使舵机能控制机械手爪的开
合,如图2-53所示。
图2-52 组装机械手爪 图2-53 安装手爪控制舵机
4.整体组装
把安装好舵机的机械手爪与其他
部分进行连接,完成整个机械手臂的组
装,如图2-54所示。
图2-54 完成连接
思考
1.如何让机器人的手臂更加稳固?
2.如何加大机器人手臂的灵活度,让手臂实现更多动作?
0262
第二章 机器人的传动机械
综合学习活动
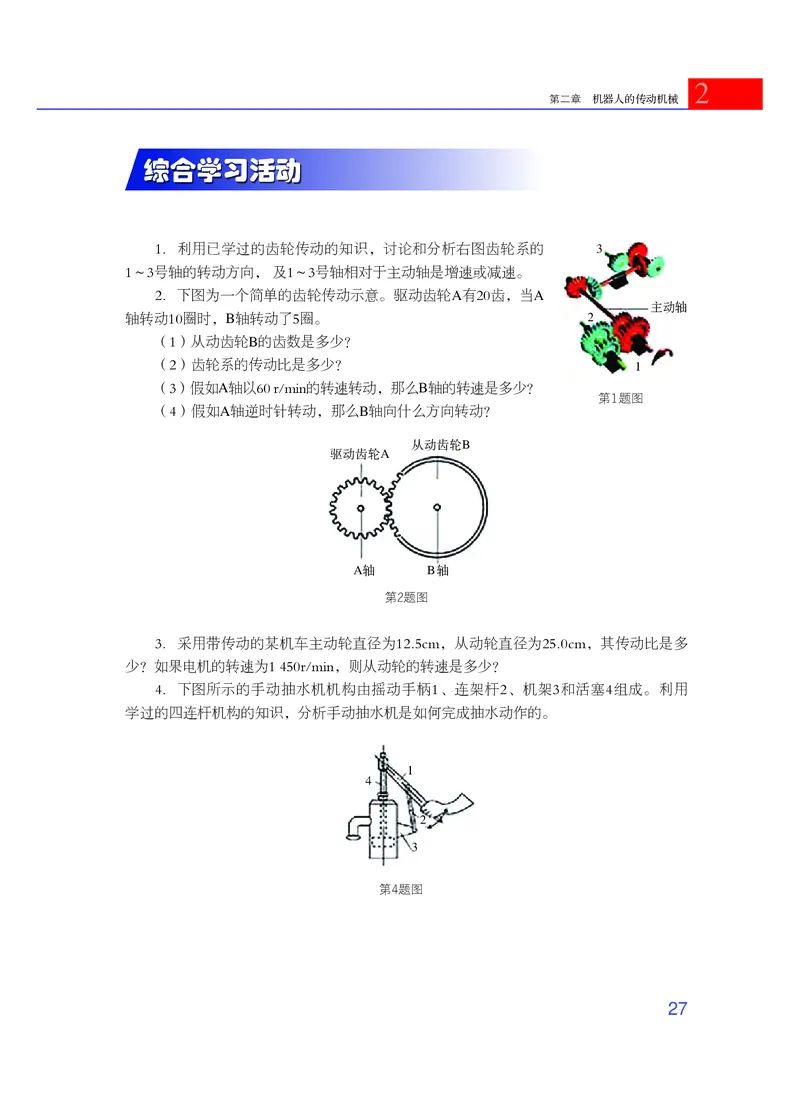
1.利用已学过的齿轮传动的知识,讨论和分析右图齿轮系的 3
1~3号轴的转动方向, 及1~3号轴相对于主动轴是增速或减速。
2.下图为一个简单的齿轮传动示意。驱动齿轮A有20齿,当A
主动轴
轴转动10圈时,B轴转动了5圈。 2
(1)从动齿轮B的齿数是多少?
(2)齿轮系的传动比是多少? 1
(3)假如A轴以60r/min的转速转动,那么B轴的转速是多少?
第1题图
(4)假如A轴逆时针转动,那么B轴向什么方向转动?
从动齿轮B
驱动齿轮A
A轴 B轴
第2题图
3.采用带传动的某机车主动轮直径为12.5cm,从动轮直径为25.0cm,其传动比是多
少?如果电机的转速为1 450r/min,则从动轮的转速是多少?
4.下图所示的手动抽水机机构由摇动手柄1、连架杆2、机架3和活塞4组成。利用
学过的四连杆机构的知识,分析手动抽水机是如何完成抽水动作的。
1
4
2
3
第4题图
027通用技术 选择性必修2 机器人设计与制作
本章回顾与评价
一、学习内容梳理
TA ET
齿轮传动机构
2 齿轮传动和平
面连杆机构
平面连杆机构
TA ET
机械部分的组成
1 机器人的 机器人的
机械部分 传动机械
传动机械
机器人的移动机构
3 机器人的
机器人的手爪机构
机械设计
机器人机械部分的搭建
TA ID ET TD CM
说明:TA—技术意识,ID—创新设计,ET—工程思维,TD—图样表达,CM—物化能力
二、学习评价
评价方式
评价内容
自评 互评 师评
了解机器人的机械部分和传动机械
了解齿轮和齿轮系传动,能计算简单的齿轮传动比,按照
装配图样安装和调试简单的齿轮装置
分析常见连杆传动装置的结构及其应用,并根据需求设计
和制作简单的连杆装置
学会机器人机械结构的初步设计方法,初步学会机器人机
械部分的搭建
说明:A—优秀,B—良好,C—合格,D—待改进
通过本章的学习,你的核心素养得到了哪些发展?
028三
第 章
机器人的控制器
控制器是机器人的大脑,它负责收集机器人周围环境及其工作对象的各种有用信息,在程序
控制下进行分析判断并做出反应,控制相应执行机构完成相应动作。一般机器人的控制器都是由
计算机系统组成,而简易机器人的控制器则主要由称为单片机的微型计算机系统组成。通用技术 选择性必修2 机器人设计与制作
一
第 节 单芯片微控制器
学习目标
了解微控制器的基本结构及应用特点。
掌握微控制器的使用方法及最小应用系统的设计方法。
情景
单片机
图3-1是一个足球机器人,在进入比赛场并打
开电源开关后,它可以自动寻找足球并判断对方球
门的位置,然后设法携带足球绕过对方球员和守门
员的拦截,将足球推入对方球门。是什么让机器人
具有了“智能”呢?
图3-1 足球机器人
一、什么是微控制器
观察
通过观察实物或相关的图片,了解计算机主机有哪些主要部件(图3-2)。
CPU
内存储器
输入/输出接口
图3-2 计算机主机
通过观察,我们知道组成一台计算机主机的主要部件有CPU(central processing unit,
中文叫中央处理器)、内存储器、输入/输出接口等。
0303
第三章 机器人的控制器
计算机的发明给我们带来了一场新的技术革命,
现在计算机技术的应用已经渗透到社会的各个领域。
随着技术的发展和应用的需要,人们设计和生产了一
种微型的计算机芯片,这种芯片内部集成了计算机的
主要部件(CPU、存储器、I/O接口等),可以装嵌
在许多电子控制设备中实现自动控制。例如我们身边
图3-3 单片机
的许多家用电器中就嵌入了这种芯片, 实现了自动或
半自动控制方式,这种芯片被称为单片机(图3-3)。
单片机全称是单片微型计算机(single chip microcomputer),也称微控制器
(microcontroller),国外称MCU(micro control unit),它是一个大规模的集成电路芯
片。在这个芯片里集成了计算机的一些基本部件,包括中央处理器(CPU)、存储器
(RAM和ROM)、定时振荡器(时钟)和输入/输出接口(I/O接口)等。我们只要将编
写好的程序固化到单片机内,它就能按程序执行,实现各种控制的功能。
二、单片机的特点与应用
案例
在某中学的足球机器人比赛活动中,高二(1)班的1号机器人和高二(2)班
的2号机器人进行了两局对抗赛。第一局2号机器人赢了。中间休息时,高二(1)
班的同学针对2号机器人在场上的表现对1号机器人的程序进行修改。第二局一开
始,1号机器人的表现与第一局相比判若两人,很快就占据主动,获得胜利。
在上例中,1号机器人的硬件结构并没有改变,只要修改原来的程序就可以获得不同
的效果。这是单片机的特点之一,可以通过修改程序来实现不同的控制策略。单片机的程
序可反复修改,应用灵活。
单片机的另一个特点是体积小,它可装嵌在各种设备、仪器仪表、家用电器和玩具当
中,并通过程序的控制,大大简化硬件电路,使产品的体积更小、成本更低、性能更优。
除此之外,单片机还具有价格便宜、功耗低、抗干扰能力强等特点。
立即行动
随着科学技术的发展,目前,各式各样的高性能的单片机如雨后春笋般不断涌现,以
满足不同行业的不同需求。把你了解的一些单片机的应用例子填写到表3-1中。
031通用技术 选择性必修2 机器人设计与制作
表3-1 单片机的应用例子
应用的行业 例 子
三、单片机的最小系统
一片单片机芯片就是一台微控制器,只要在外围加上一些电子元器件就能构成一个微
控制系统。
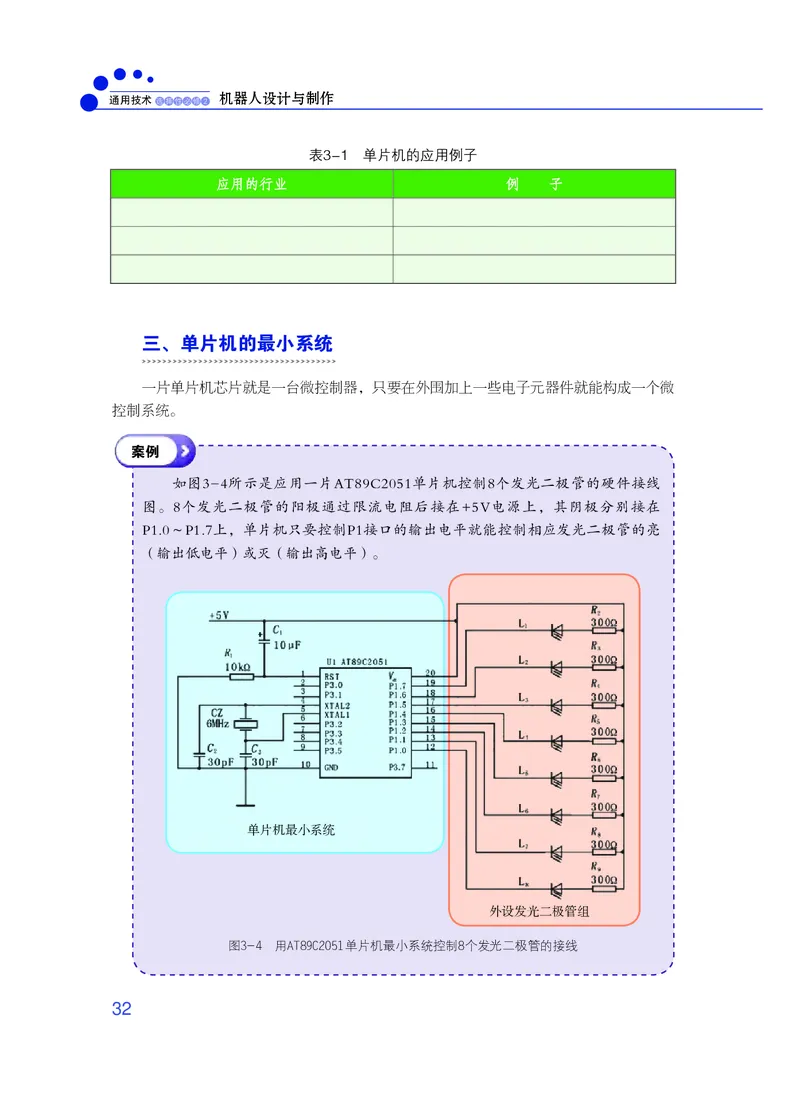
案例
如图3-4所示是应用一片AT89C2051单片机控制8个发光二极管的硬件接线
图。8个发光二极管的阳极通过限流电阻后接在+5V电源上,其阴极分别接在
P1.0~P1.7上,单片机只要控制P1接口的输出电平就能控制相应发光二极管的亮
(输出低电平)或灭(输出高电平)。
单片机最小系统
外设发光二极管组
图3-4 用AT89C2051单片机最小系统控制8个发光二极管的接线
0323
第三章 机器人的控制器
例如我们想要第一个发光二极管(接在P1.0引脚上)发亮,只要控制单片机在P1.0引
脚上输出低电平信号就可以实现,要它熄灭则输出高电平信号。
实践
设计并制作一个单片机最小系统,它可控制8个发光二极管实现分组交替闪烁。
要求:
①通过制作一个单片机最小应用系统,理解单片机各引脚的功能和应用方法。
②通过亲历汇编源程序的输入、编译成目标程序并写入单片机的全过程,初步了解有
关汇编语言和机器语言的含义。掌握一种单片机的程序固化方法。
方法指导
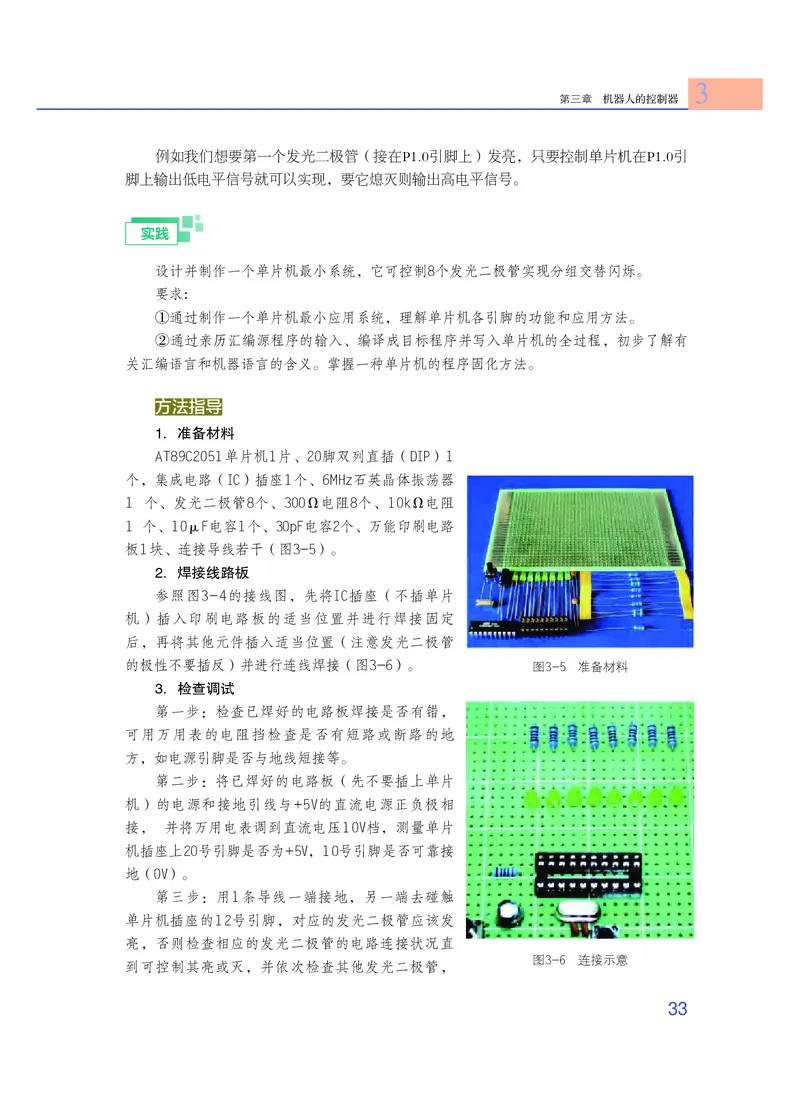
1.准备材料
AT89C2051单片机1片、20脚双列直插(DIP)1
个,集成电路(IC)插座1个、6MHz石英晶体振荡器
1 个、发光二极管8个、300Ω电阻8个、10kΩ电阻
1 个、10μF电容1个、30pF电容2个、万能印刷电路
板1块、连接导线若干(图3-5)。
2.焊接线路板
参照图3-4的接线图,先将IC插座(不插单片
机)插入印刷电路板的适当位置并进行焊接固定
后,再将其他元件插入适当位置(注意发光二极管
的极性不要插反)并进行连线焊接(图3-6)。 图3-5 准备材料
3.检查调试
第一步:检查已焊好的电路板焊接是否有错,
可用万用表的电阻挡检查是否有短路或断路的地
方,如电源引脚是否与地线短接等。
第二步:将已焊好的电路板(先不要插上单片
机)的电源和接地引线与+5V的直流电源正负极相
接, 并将万用电表调到直流电压10V档,测量单片
机插座上20号引脚是否为+5V,10号引脚是否可靠接
地(0V)。
第三步:用1条导线一端接地,另一端去碰触
单片机插座的12号引脚,对应的发光二极管应该发
亮,否则检查相应的发光二极管的电路连接状况直
图3-6 连接示意
到可控制其亮或灭,并依次检查其他发光二极管,
033通用技术 选择性必修2 机器人设计与制作
直到8个发光二极管都正常工作。
4.在计算机输入程序,编译程序
在实验室的计算机上打开MCS51汇编程序(或仿真系统),输入下列汇编源程序:
ORG 0000H ; 从0地址开始
START:MOV P1, #55H ; 将01010101送P1接口
ACALL DELAY ; 调用延时子程序
MOV P1, #0AAH ; 将10101010送P1接口
ACALL DELAY
SJMP START ; 转回起始点循环运行
DELAY:MOV R7, #0FFH ; 延时子程序
L1:MOV R6, #0FFH
L2:NOP
NOP
NOP
NOP
NOP
NOP
DJNZ R6, L2
DJNZ R7, L1
RET
END
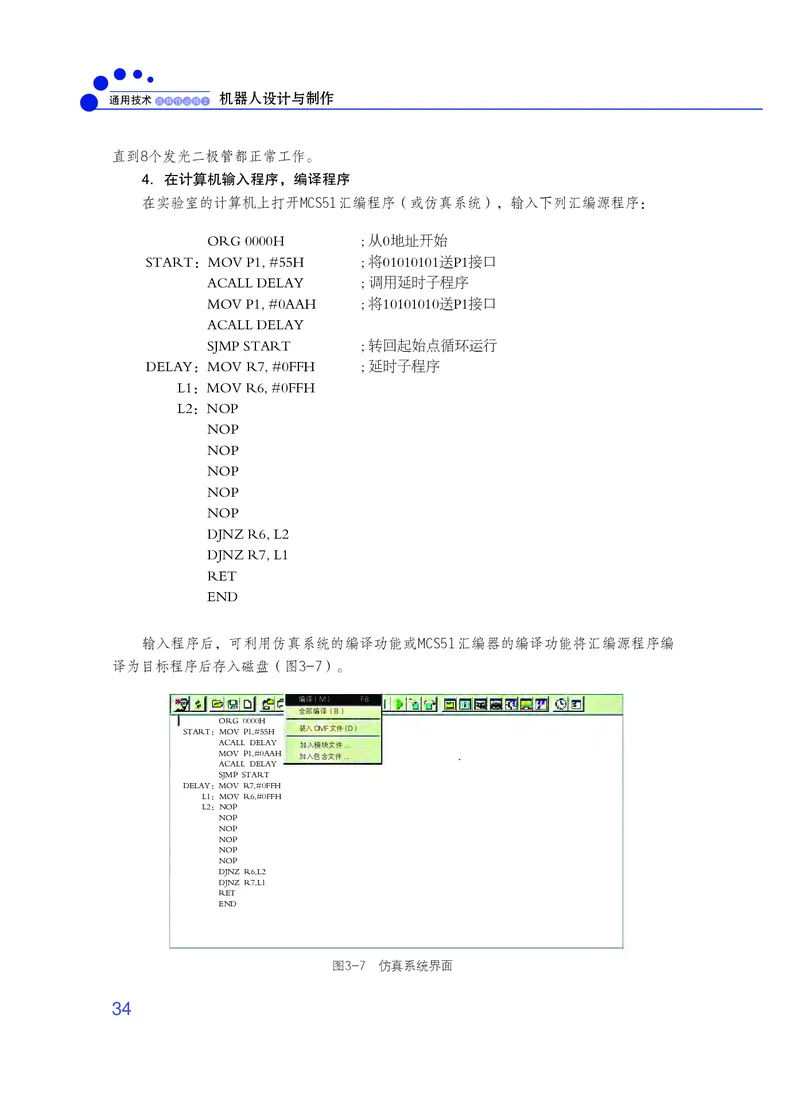
输入程序后,可利用仿真系统的编译功能或MCS51汇编器的编译功能将汇编源程序编
译为目标程序后存入磁盘(图3-7)。
编译(M) F8
全部编译(B)
ORG 0000H
START:MOV P1,#55H 装入OMF文件(D)
ACALL DELAY
加入模块文件...
MOV P1,#0AAH
加入包含文件...
ACALL DELAY
SJMP START
DELAY:MOV R7,#0FFH
L1:MOV R6,#0FFH
L2:NOP
NOP
NOP
NOP
NOP
NOP
DJNZ R6,L2
DJNZ R7,L1
RET
END
图3-7 仿真系统界面
0343
第三章 机器人的控制器
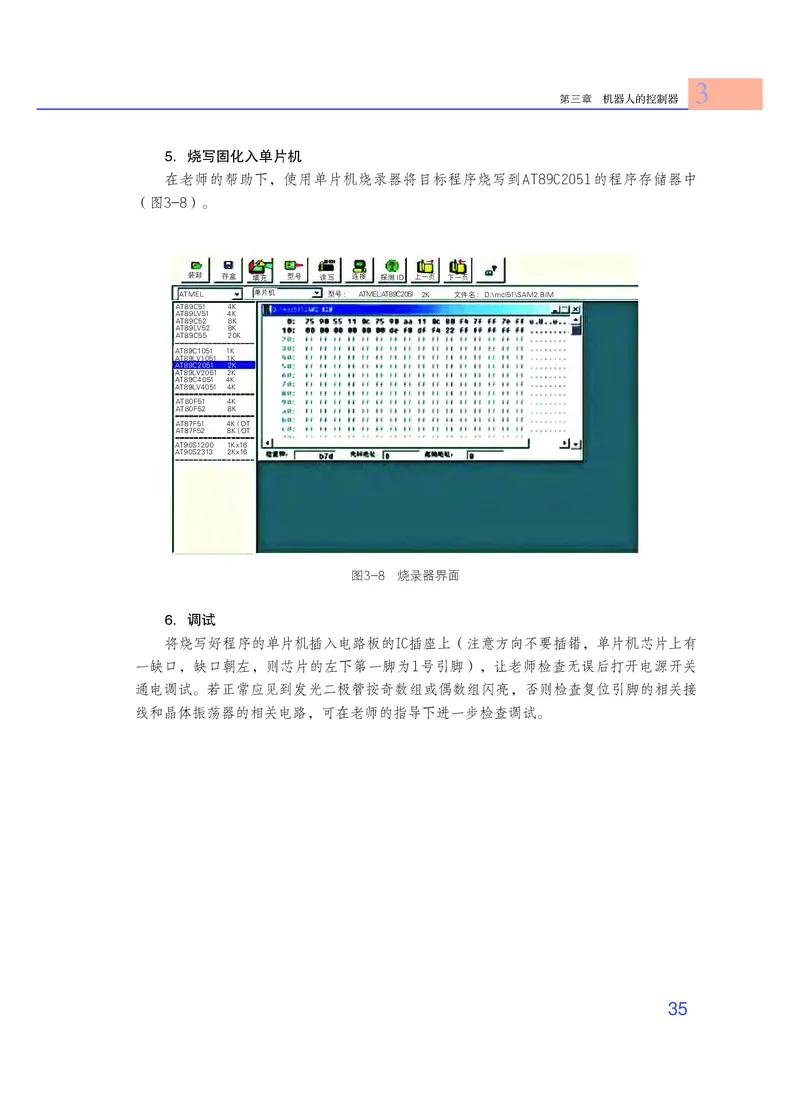
5.烧写固化入单片机
在老师的帮助下,使用单片机烧录器将目标程序烧写到AT89C2051的程序存储器中
(图3-8)。
装卸 存盒 填充 型号 读写 连接 探测ID 上一页 下一页
ATMEL 单片机 型号: ATMEL:AT89C2051 2K 文件名: D:\mcl51\SAM2.BIM
AT89C51 4K
AT89LV51 4K
AT89C52 8K
AT89LV52 8K
AT89C55 20K
AT89C1051 1K
AT89LV1051 1K
AT89C2051 2K
AT89LV2051 2K
AT89C4051 4K
AT89LV4051 4K
AT80F51 4K
AT80F52 8K
AT87F51 4K(OT
AT87F52 8K(OT
AT90S1200 1Kx16
AT90S2313 2Kx16
图3-8 烧录器界面
6.调试
将烧写好程序的单片机插入电路板的IC插座上(注意方向不要插错,单片机芯片上有
一缺口,缺口朝左,则芯片的左下第一脚为1号引脚),让老师检查无误后打开电源开关
通电调试。若正常应见到发光二极管按奇数组或偶数组闪亮,否则检查复位引脚的相关接
线和晶体振荡器的相关电路,可在老师的指导下进一步检查调试。
035通用技术 选择性必修2 机器人设计与制作
二
第 节 Arduino控制器平台
学习目标
了解Arduino控制器平台的硬件结构。
掌握Arduino控制器平台的基本编程方法。
情景
2005年,意大利伊夫雷亚交互设计研究所的老师为了给学生提供一套便宜易
用的电子控制实验平台,联合西班牙的微控制器设计师和学生设计出来了一套控
制器应用开发平台,取名为Arduino。它包含硬件(各种型号的Arduino板)和软件
(Arduino IDE),由于它的硬件和软件都是开放的,自问世以来经过无数次的修改
和完善,成为世界各地制作爱好者的宠儿。
一、认识Arduino平台主要硬件
观察
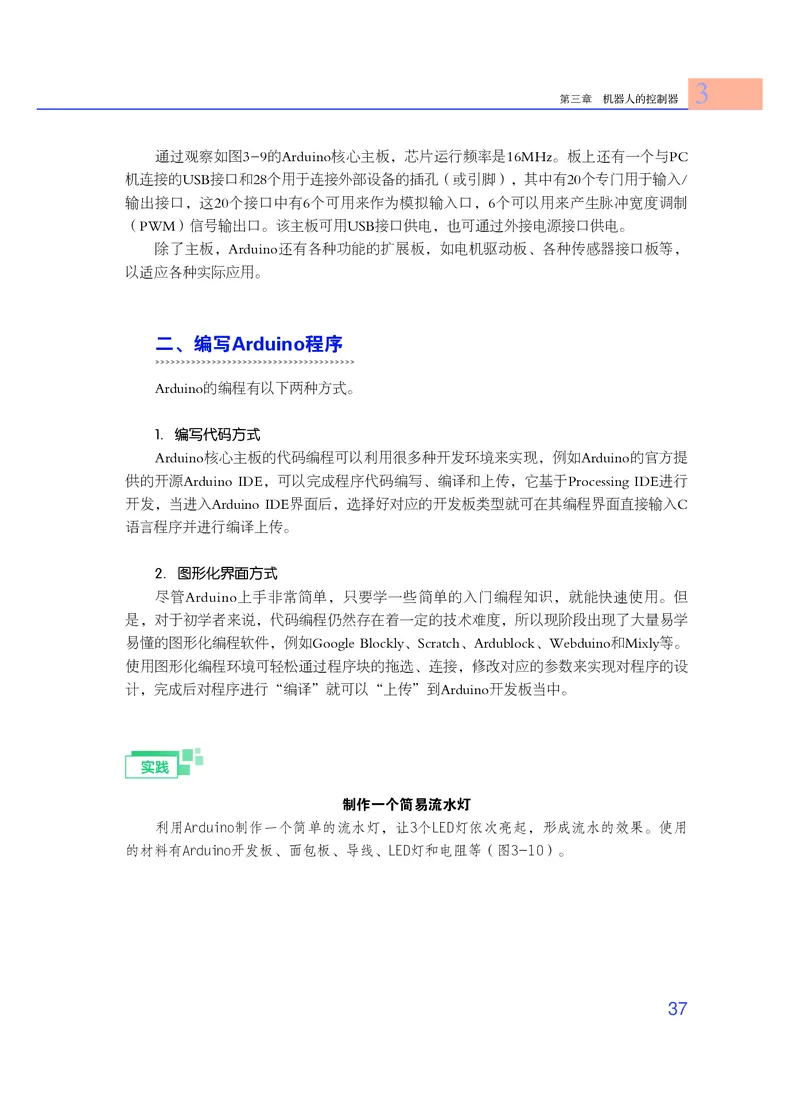
观察老师提供的Arduino主板实物,并结合图3-9的图示,认识Arduino主板的主要硬件。
串口收/发 第13脚
指示LED 的LED 数字I/O引脚
复位按钮
USB转串口IC
电源指示LED
在线串行
USB插座
编程插针
可恢复式保险
Atmel Atmega
丝(500mA)
328单片机
16MHz晶振
5V低压差 外接直流 3.3V低压差 电源引脚 模拟I/O 引脚
稳压器 电源插座 稳压器
图3-9 Arduino主板
0363
第三章 机器人的控制器
通过观察如图3-9的Arduino核心主板,芯片运行频率是16MHz。板上还有一个与PC
机连接的USB接口和28个用于连接外部设备的插孔(或引脚),其中有20个专门用于输入/
输出接口,这20个接口中有6个可用来作为模拟输入口,6个可以用来产生脉冲宽度调制
(PWM)信号输出口。该主板可用USB接口供电,也可通过外接电源接口供电。
除了主板,Arduino还有各种功能的扩展板,如电机驱动板、各种传感器接口板等,
以适应各种实际应用。
二、编写Arduino程序
Arduino的编程有以下两种方式。
1.编写代码方式
Arduino核心主板的代码编程可以利用很多种开发环境来实现,例如Arduino的官方提
供的开源Arduino IDE,可以完成程序代码编写、编译和上传,它基于Processing IDE进行
开发,当进入Arduino IDE界面后,选择好对应的开发板类型就可在其编程界面直接输入C
语言程序并进行编译上传。
2.图形化界面方式
尽管Arduino上手非常简单,只要学一些简单的入门编程知识,就能快速使用。但
是,对于初学者来说,代码编程仍然存在着一定的技术难度,所以现阶段出现了大量易学
易懂的图形化编程软件,例如Google Blockly、Scratch、Ardublock、Webduino和Mixly等。
使用图形化编程环境可轻松通过程序块的拖选、连接,修改对应的参数来实现对程序的设
计,完成后对程序进行“编译”就可以“上传”到Arduino开发板当中。
实践
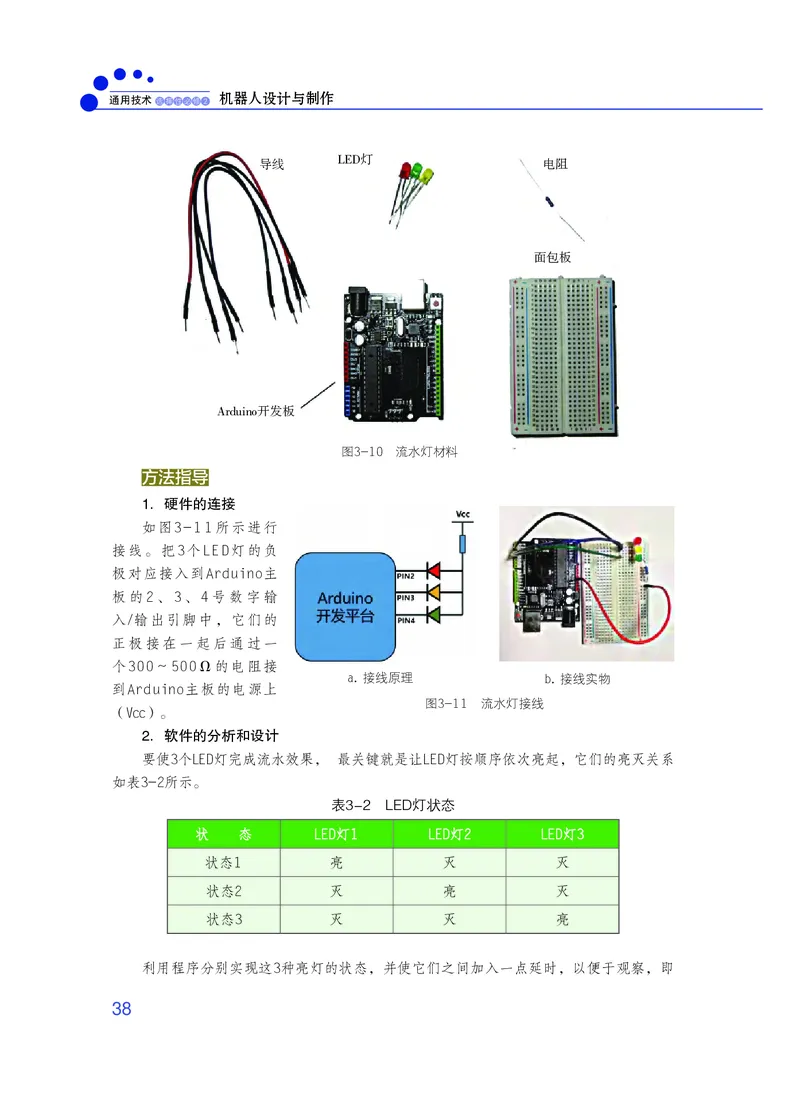
制作一个简易流水灯
利用Arduino制作一个简单的流水灯,让3个LED灯依次亮起,形成流水的效果。使用
的材料有Arduino开发板、面包板、导线、LED灯和电阻等(图3-10)。
037通用技术 选择性必修2 机器人设计与制作
LED灯
导线 电阻
面包板
Arduino开发板
图3-10 流水灯材料
方法指导
1.硬件的连接
如图3-11所示进行
接线。把3个LED灯的负
极对应接入到Arduino主
板的2、3、4号数字输
入/输出引脚中,它们的
正极接在一起后通过一
个300~500Ω的电阻接
a. 接线原理 b. 接线实物
到Arduino主板的电源上
图3-11 流水灯接线
(Vcc)。
2.软件的分析和设计
要使3个LED灯完成流水效果, 最关键就是让LED灯按顺序依次亮起,它们的亮灭关系
如表3-2所示。
表3-2 LED灯状态
状 态 LED灯1 LED灯2 LED灯3
状态1 亮 灭 灭
状态2 灭 亮 灭
状态3 灭 灭 亮
利用程序分别实现这3种亮灯的状态,并使它们之间加入一点延时,以便于观察,即
0383
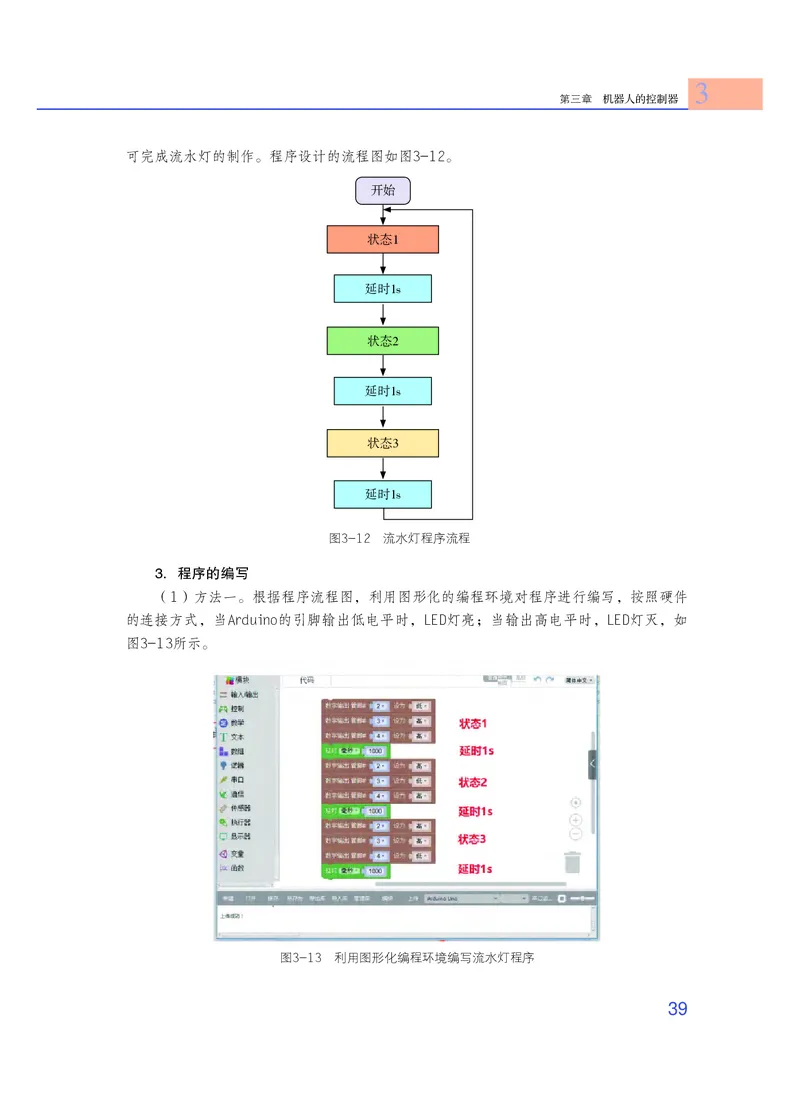
第三章 机器人的控制器
可完成流水灯的制作。程序设计的流程图如图3-12。
开始
状态1
延时1s
状态2
延时1s
状态3
延时1s
图3-12 流水灯程序流程
3.程序的编写
(1)方法一。根据程序流程图,利用图形化的编程环境对程序进行编写,按照硬件
的连接方式,当Arduino的引脚输出低电平时,LED灯亮;当输出高电平时,LED灯灭,如
图3-13所示。
图3-13 利用图形化编程环境编写流水灯程序
039通用技术 选择性必修2 机器人设计与制作
(2)方法二。用编写代码方式对Arduino进行编程:
void setup() //程序初始化
{
pinMode(2, OUTPUT); //设置PIN2为数字输出模式
pinMode(3, OUTPUT); //设置PIN3为数字输出模式
pinMode(4, OUTPUT); //设置PIN4为数字输出模式
}
void loop() //主循环
{
digitalWrite(2,LOW); //状态1
digitalWrite(3,HIGH);
digitalWrite(4,HIGH);
delay(1000); //延时1s
digitalWrite(2,HIGH); //状态2
digitalWrite(3,LOW);
digitalWrite(4,HIGH);
delay(1000); //延时1s
digitalWrite(2,HIGH); //状态3
digitalWrite(3,HIGH);
digitalWrite(4,LOW);
delay(1000); //延时1s
}
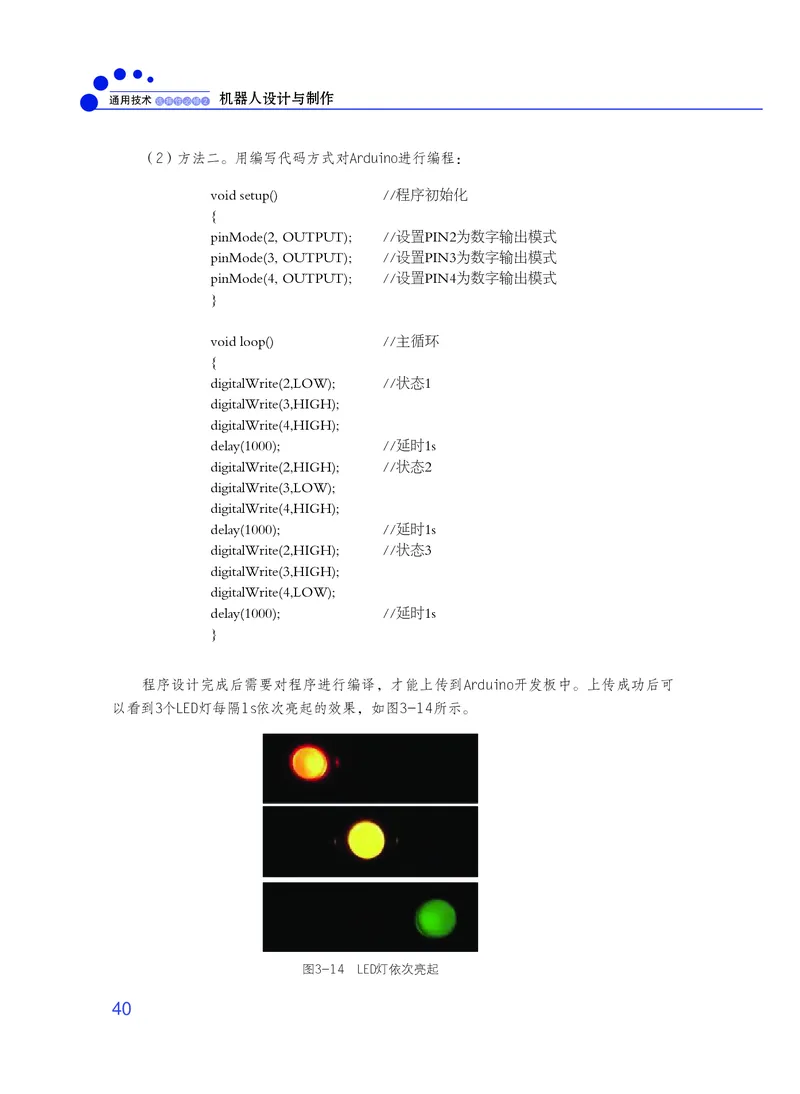
程序设计完成后需要对程序进行编译,才能上传到Arduino开发板中。上传成功后可
以看到3个LED灯每隔1s依次亮起的效果,如图3-14所示。
图3-14 LED灯依次亮起
0403
第三章 机器人的控制器
三
第 节 一体化控制器
学习目标
了解机器人一体化控制器的硬件结构。
掌握机器人一体化控制器的一种编程方法。
情景
课堂上,张老师拿出一架小车机器人,放在地上并按了一下运行按钮,机器人
就可以在课室的地上到处走动,但又不会碰撞到任何物品,非常有趣。原来机器人
上面安装着一款一体化的控制器,它是如何控制机器人走动的呢?
一、认识一体化控制器硬件
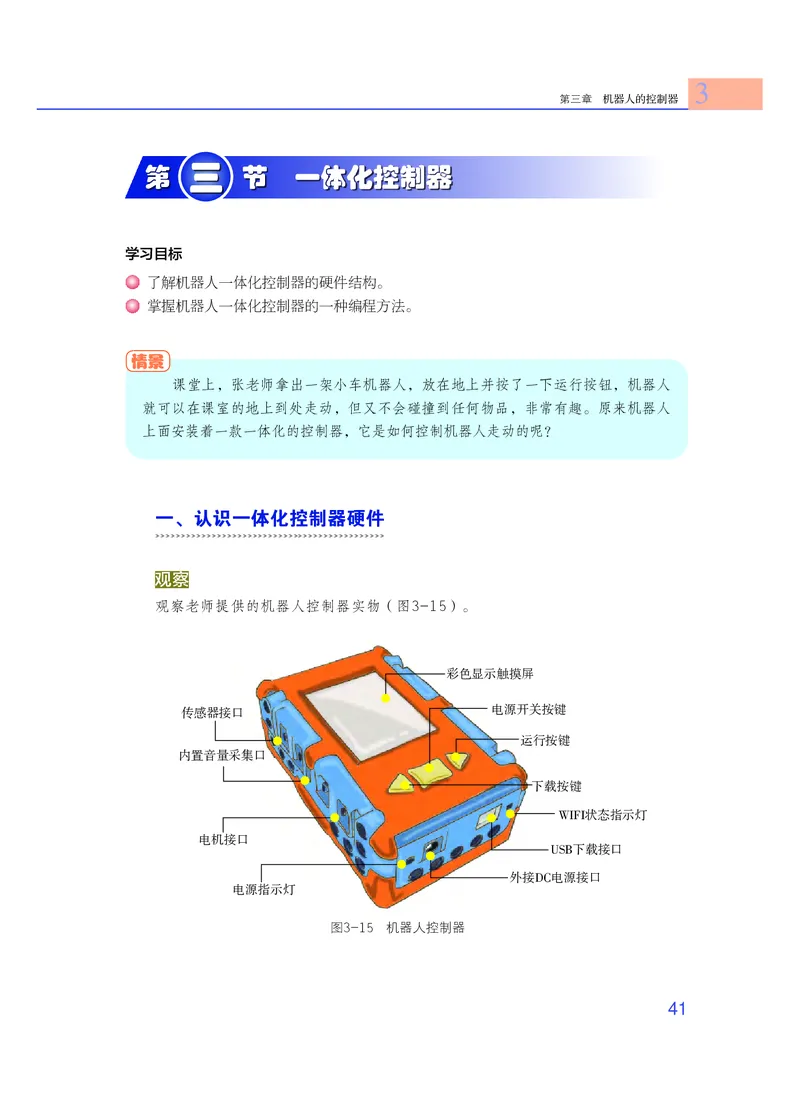
观察
观察老师提供的机器人控制器实物(图3-15)。
彩色显示触摸屏
传感器接口 电源开关按键
运行按键
内置音量采集口
下载按键
WIFI状态指示灯
电机接口
USB下载接口
外接DC电源接口
电源指示灯
图3-15 机器人控制器
041通用技术 选择性必修2 机器人设计与制作
图3-15是一款机器人控制器的示意图,在它内部装有高性能的32位微控制器芯片,主
频72MHz,内存储器容量8MB,内置音量采集和电压检测模块等。控制器外部有一个分辨
率为320×240的彩色触摸屏和3个按键作为人机对话的界面,控制器提供8路传感器接口,
每路接口可连接不同类型的传感器,同时,控制器还提供带驱动输出及过载保护并支持编
码输入的电机接口。
该控制器支持USB、WIFI和HID等多种下载模式,方便程序的下载。
控制器工作电源电压为6~9V,可接外置直流稳压电源或内置6节AA电池。
二、编写控制器程序
实践
结合图3-15的图示,认识机器人控制器硬件。把我们搭建好的一台轮式机器人,通
过硬件接线和编程,让它动起。
方法指导
1.硬件接线与初步调试
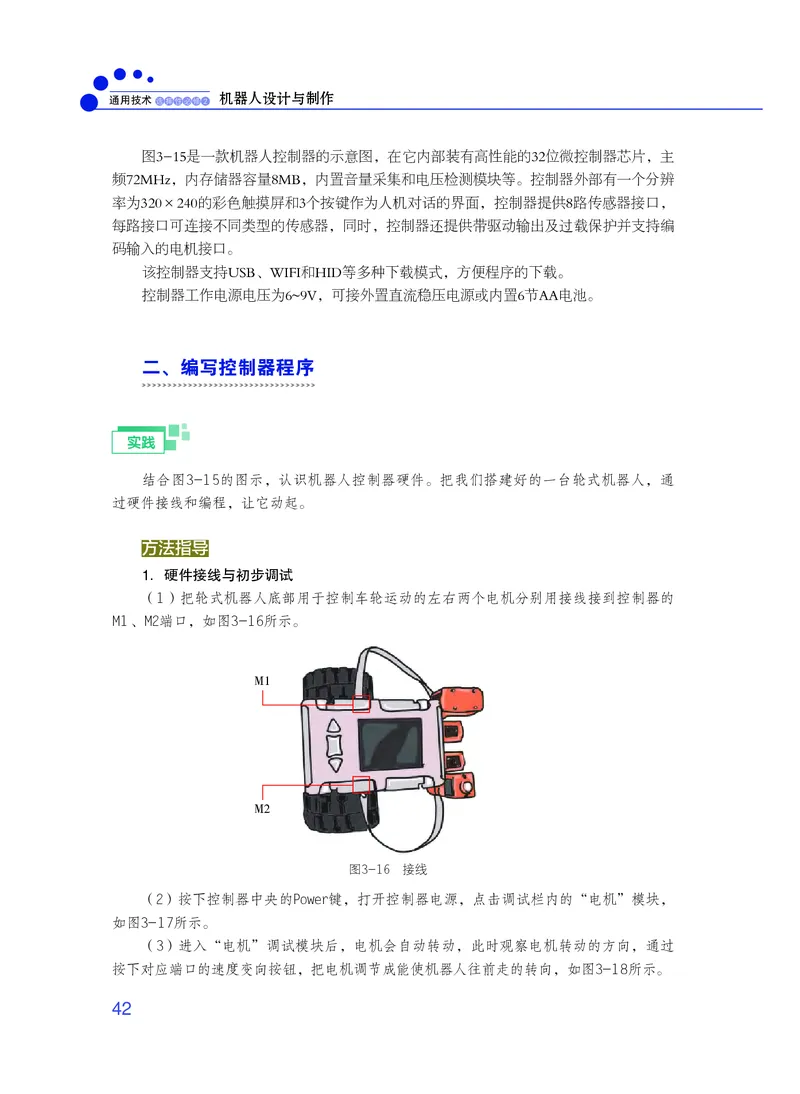
(1)把轮式机器人底部用于控制车轮运动的左右两个电机分别用接线接到控制器的
M1、M2端口,如图3-16所示。
M1
M2
图3-16 接线
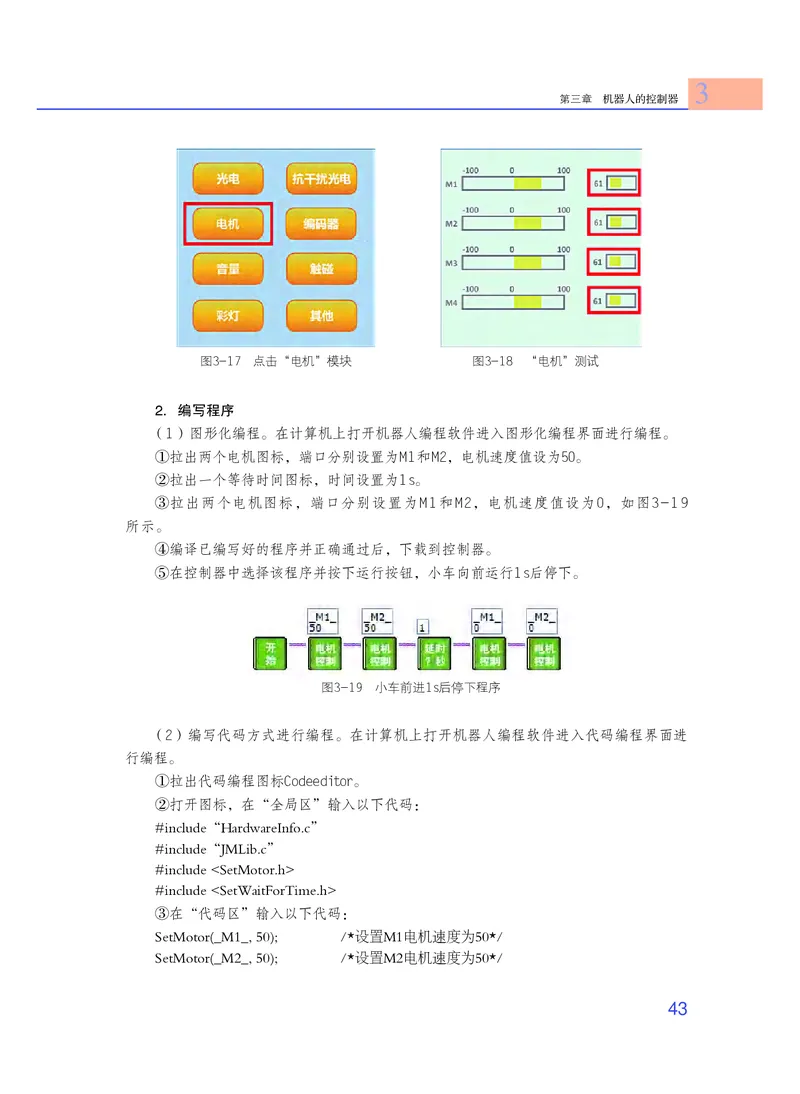
(2)按下控制器中央的Power键,打开控制器电源,点击调试栏内的“电机”模块,
如图3-17所示。
(3)进入“电机”调试模块后,电机会自动转动,此时观察电机转动的方向,通过
按下对应端口的速度变向按钮,把电机调节成能使机器人往前走的转向,如图3-18所示。
0423
第三章 机器人的控制器
图3-17 点击“电机”模块 图3-18 “电机”测试
2.编写程序
(1)图形化编程。在计算机上打开机器人编程软件进入图形化编程界面进行编程。
①拉出两个电机图标,端口分别设置为M1和M2,电机速度值设为50。
②拉出一个等待时间图标,时间设置为1s。
③拉出两个电机图标,端口分别设置为M1和M2,电机速度值设为0,如图3-19
所示。
④编译已编写好的程序并正确通过后,下载到控制器。
⑤在控制器中选择该程序并按下运行按钮,小车向前运行1s后停下。
图3-19 小车前进1s后停下程序
(2)编写代码方式进行编程。在计算机上打开机器人编程软件进入代码编程界面进
行编程。
①拉出代码编程图标Codeeditor。
②打开图标,在“全局区”输入以下代码:
#include“HardwareInfo.c”
#include“JMLib.c”
#include
#include
③在“代码区”输入以下代码:
SetMotor(_M1_, 50); /*设置M1电机速度为50*/
SetMotor(_M2_, 50); /*设置M2电机速度为50*/
043通用技术 选择性必修2 机器人设计与制作
SetWaitForTime(1); /*设置等待时间为1秒*/
SetMotor(_M1_, 0); /*设置M1电机速度为0*/
SetMotor(_M1_, 0); /*设置M2电机速度为0*/
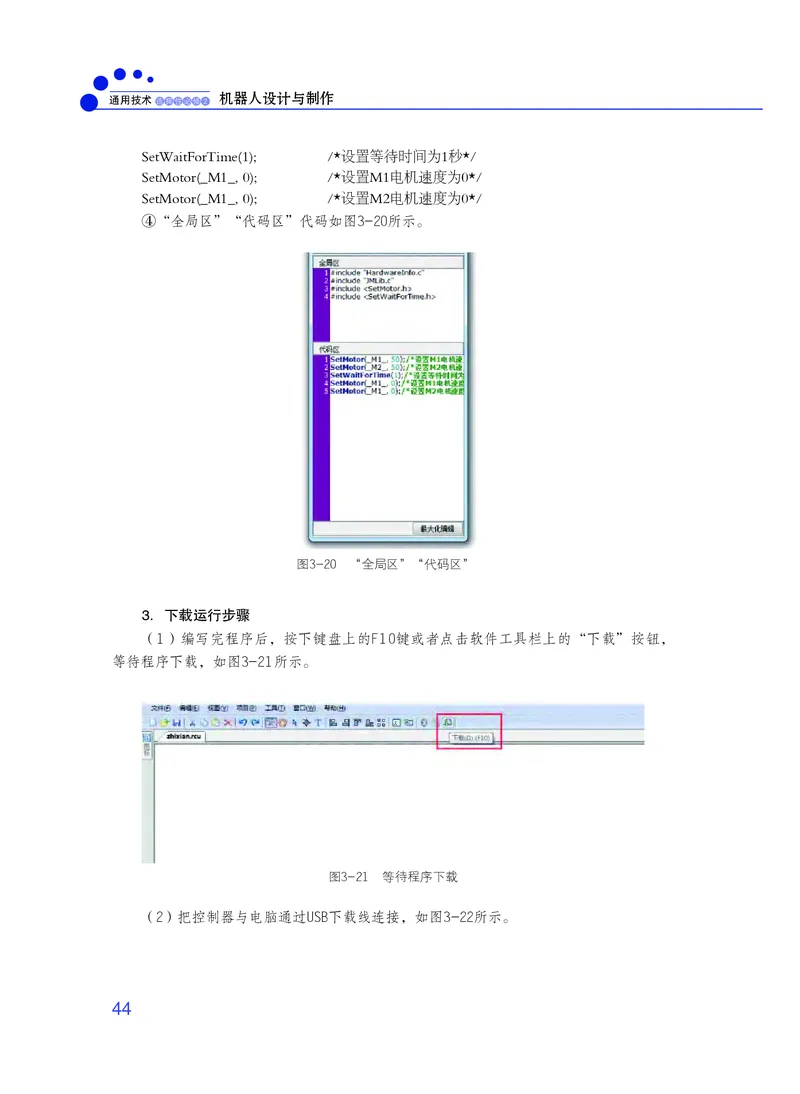
④“全局区”“代码区”代码如图3-20所示。
图3-20 “全局区”“代码区”
3.下载运行步骤
(1)编写完程序后,按下键盘上的F10键或者点击软件工具栏上的“下载”按钮,
等待程序下载,如图3-21所示。
图3-21 等待程序下载
(2)把控制器与电脑通过USB下载线连接,如图3-22所示。
0443
第三章 机器人的控制器
图3-22 连接
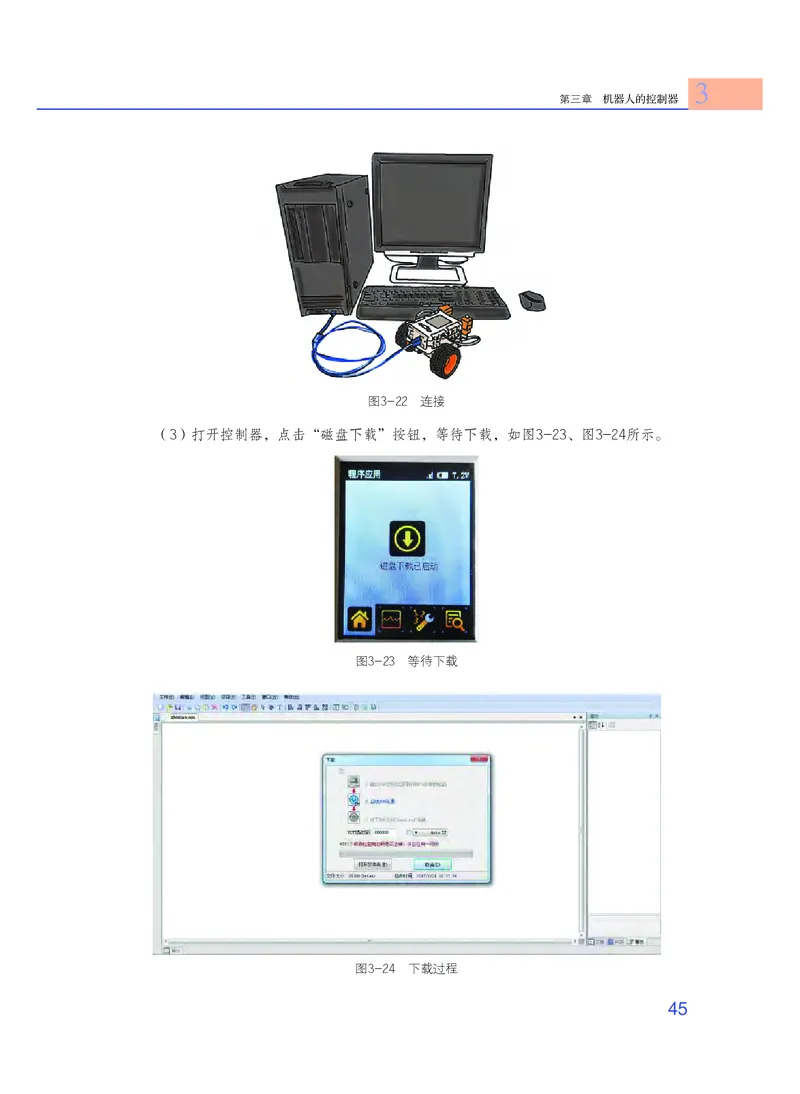
(3)打开控制器,点击“磁盘下载”按钮,等待下载,如图3-23、图3-24所示。
图3-23 等待下载
图3-24 下载过程
045通用技术 选择性必修2 机器人设计与制作
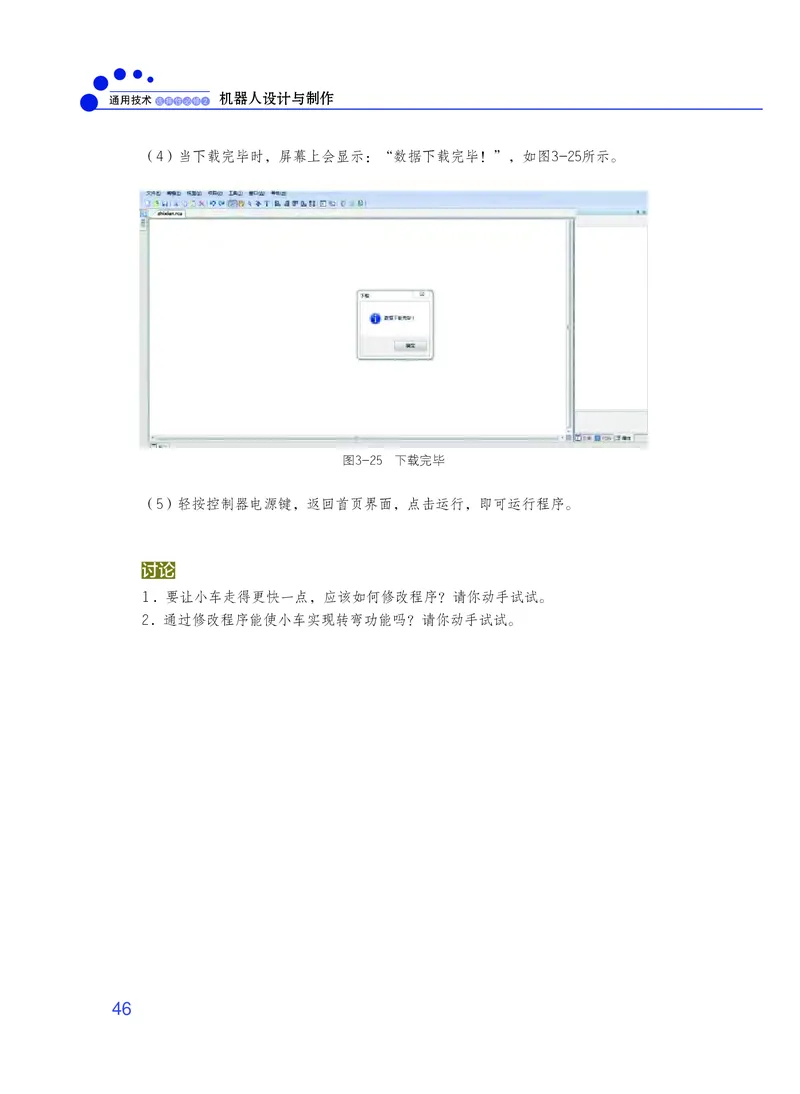
(4)当下载完毕时,屏幕上会显示:“数据下载完毕!”,如图3-25所示。
图3-25 下载完毕
(5)轻按控制器电源键,返回首页界面,点击运行,即可运行程序。
讨论
1.要让小车走得更快一点,应该如何修改程序?请你动手试试。
2.通过修改程序能使小车实现转弯功能吗?请你动手试试。
0463
第三章 机器人的控制器
综合学习活动
1.上网或到图书馆查阅一种型号单片机的有关资料,指出它有多大的内部存储空
间, 有多少条外部引脚?其中有多少条是I/O引脚?
2.在第一节制作控制8个发光二极管闪烁的作品中,我们发现闪烁的速度太慢。你能
使它变快吗?请动手试一试。
3.你有办法让8个发光二极管分左右各4个闪烁吗?请动手试一试。
4.参照亮点流动流水灯的程序,请设计一个暗点流动的程序,并进行调试运行。
5.你还能想到其他的显示方式吗?请将你的想法与同学交流并合作写出程序流程图
(或写出程序并进行运行调试)。
6.根据学校条件,试用某种图形化语言编写控制机器人按正方形行走(顺时针方
向) 的程序。
7.上网搜索目前适合机器人的一体化控制器都有哪些?它们都有哪些结构特点?
047通用技术 选择性必修2 机器人设计与制作
本章回顾与评价
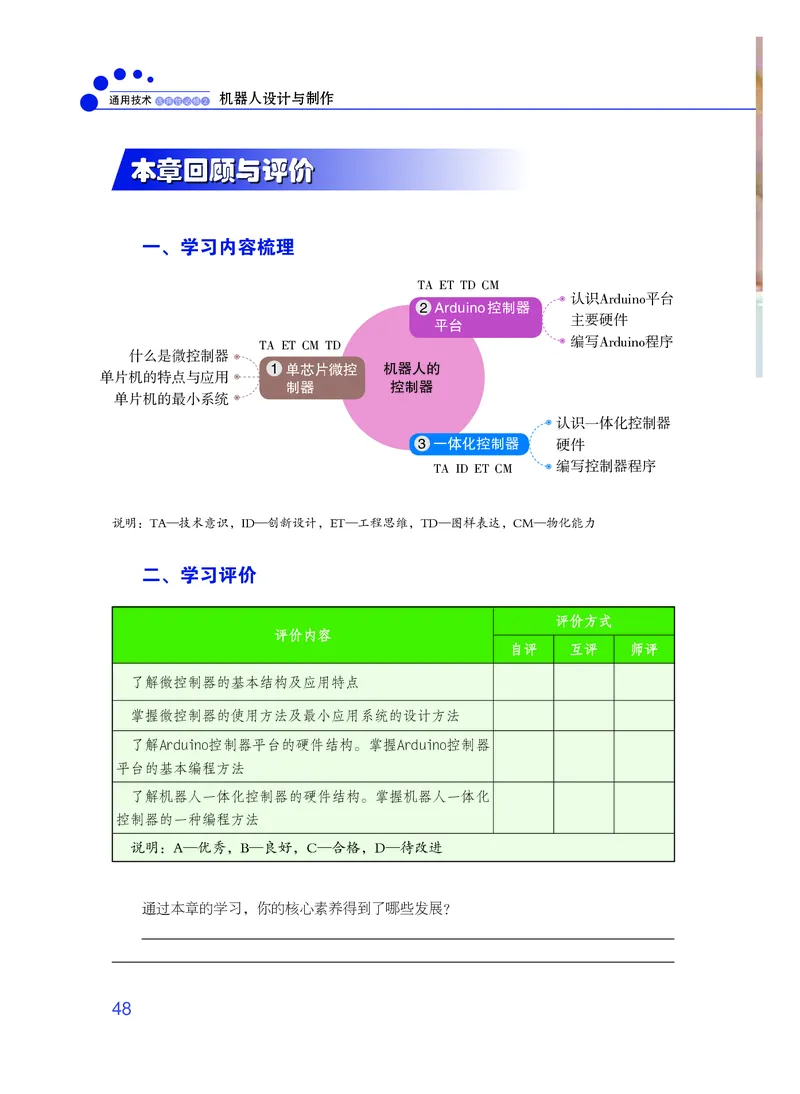
一、学习内容梳理
TA ET TD CM
认识Arduino平台
2 Arduino控制器
主要硬件
平台
编写Arduino程序
TA ET CM TD
什么是微控制器
1 单芯片微控 机器人的
单片机的特点与应用
制器 控制器
单片机的最小系统
认识一体化控制器
3 一体化控制器 硬件
TA ID ET CM 编写控制器程序
说明:TA—技术意识,ID—创新设计,ET—工程思维,TD—图样表达,CM—物化能力
二、学习评价
评价方式
评价内容
自评 互评 师评
了解微控制器的基本结构及应用特点
掌握微控制器的使用方法及最小应用系统的设计方法
了解Arduino控制器平台的硬件结构。掌握Arduino控制器
平台的基本编程方法
了解机器人一体化控制器的硬件结构。掌握机器人一体化
控制器的一种编程方法
说明:A—优秀,B—良好,C—合格,D—待改进
通过本章的学习,你的核心素养得到了哪些发展?
048四
第 章
机器人感知与传感器
机器人要准确地模拟人的动作,不但需要类似于人的大脑,还需要各种感觉和灵活的肢体。
在机器人中,它的感觉器官由各种传感器来实现,大脑由控制器实现,肢体则由电机及机械装置
等组成。让我们通过学习机器人的感知和机器人的传感器,经历设计和制作机器人的过程,领略
一下机器人感知设计与制作的无穷魅力。通用技术 选择性必修2 机器人设计与制作
一
第 节 机器人的感知
学习目标
理解机器人的基本感知功能。
掌握机器人感知外部环境信息的基本原理和方法。
情景
图4-1是比赛中的足球机器人,它一会
断球,一会盘带,一会射门,还能绕过其他
机器人。
图4-1 比赛中的足球机器人
一、机器感知与传感器
思考
足球机器人是靠什么判断球、球门、己方及对方机器人的位置的?
我们知道,人类借助感觉器官,从外界获得信息并做出反应,经历感觉→大脑思考→
做出反应的过程。机器感知的信息处理过程亦如此,它具有类似人类五官的感知功能,并
将外界信息转换成电信号,以便配合系统的其他部分共同完成控制任务,像生物一样根据
环境的变化做出相应的反应和动作。机器感知与人的信息感知对比如图4-2所示。
人
感觉器官 大脑 肢体
外
界
刺
机器人
激
传感器 控制器 执行装置
接收 处理 反应
图4-2 机器感知与人接收信息的过程比较
机器人的感知依靠传感器。传感器(Sensor)是一种能把感受到的被测量信息按一定
规律转换成其他形式可用信号的检测器件或装置。安装了各种传感器的机器人,能将外界
0504
第四章 机器人感知与传感器
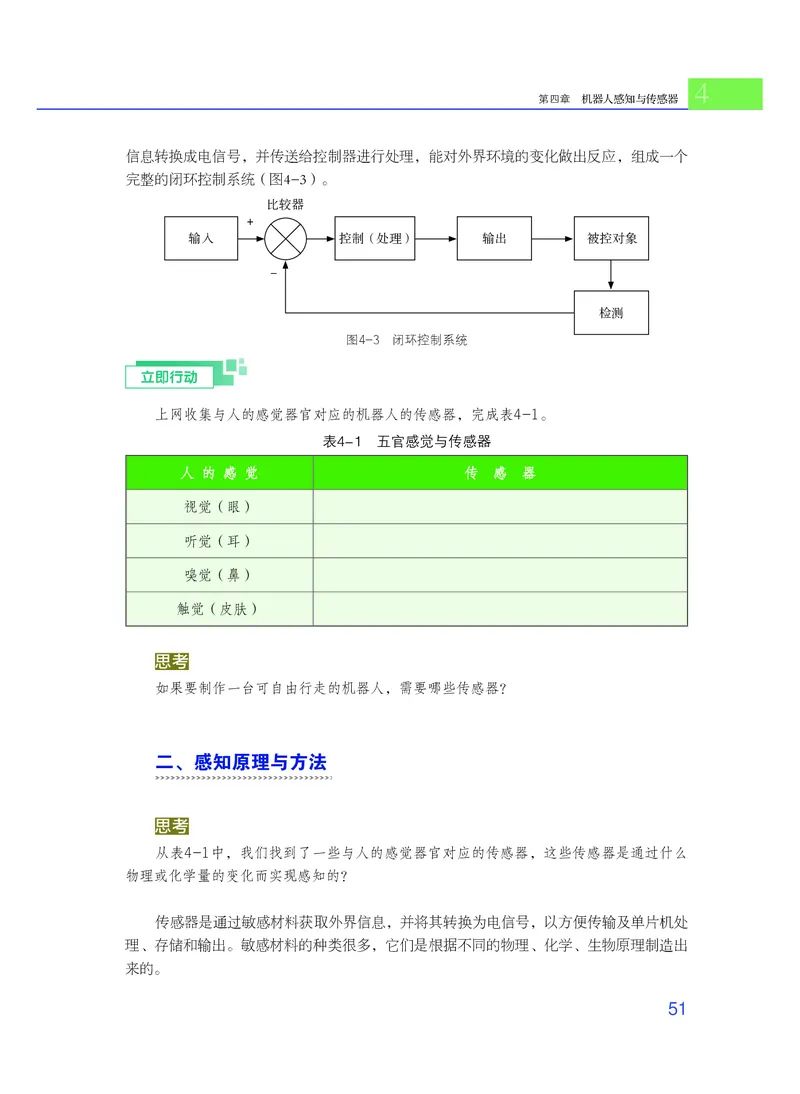
信息转换成电信号,并传送给控制器进行处理,能对外界环境的变化做出反应,组成一个
完整的闭环控制系统(图4-3)。
比较器
+
输入 控制(处理) 输出 被控对象
-
检测
图4-3 闭环控制系统
立即行动
上网收集与人的感觉器官对应的机器人的传感器,完成表4-1。
表4-1 五官感觉与传感器
人 的 感 觉 传 感 器
视觉(眼)
听觉(耳)
嗅觉(鼻)
触觉(皮肤)
思考
如果要制作一台可自由行走的机器人,需要哪些传感器?
二、感知原理与方法
思考
从表4-1中,我们找到了一些与人的感觉器官对应的传感器,这些传感器是通过什么
物理或化学量的变化而实现感知的?
传感器是通过敏感材料获取外界信息,并将其转换为电信号,以方便传输及单片机处
理、存储和输出。敏感材料的种类很多,它们是根据不同的物理、化学、生物原理制造出
来的。
051通用技术 选择性必修2 机器人设计与制作
案例
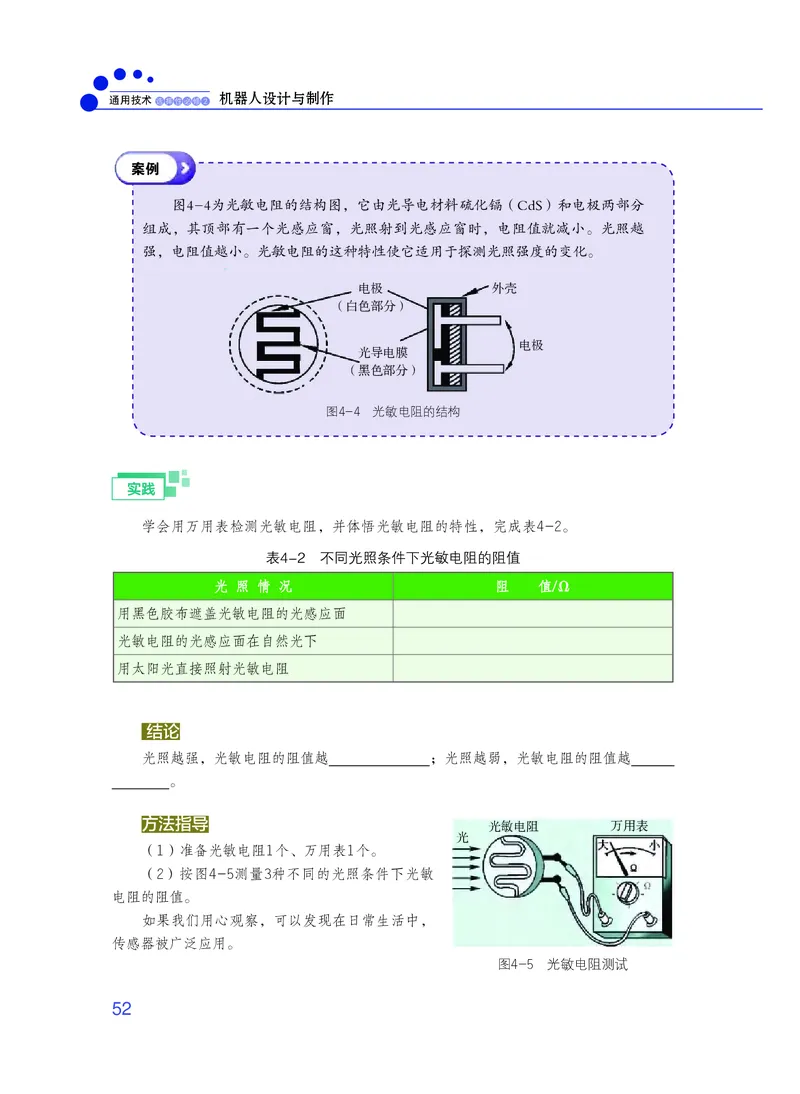
图4-4为光敏电阻的结构图,它由光导电材料硫化镉(CdS)和电极两部分
组成,其顶部有一个光感应窗,光照射到光感应窗时,电阻值就减小。光照越
强,电阻值越小。光敏电阻的这种特性使它适用于探测光照强度的变化。
电极 外壳
(白色部分)
电极
光导电膜
(黑色部分)
图4-4 光敏电阻的结构
实践
学会用万用表检测光敏电阻,并体悟光敏电阻的特性,完成表4-2。
表4-2 不同光照条件下光敏电阻的阻值
光 照 情 况 阻 值/Ω
用黑色胶布遮盖光敏电阻的光感应面
光敏电阻的光感应面在自然光下
用太阳光直接照射光敏电阻
结论
光照越强,光敏电阻的阻值越 ;光照越弱,光敏电阻的阻值越
。
方法指导
光敏电阻 万用表
光
(1)准备光敏电阻1个、万用表1个。
(2)按图4-5测量3种不同的光照条件下光敏
电阻的阻值。
如果我们用心观察,可以发现在日常生活中,
传感器被广泛应用。
图4-5 光敏电阻测试
0524
第四章 机器人感知与传感器
案例
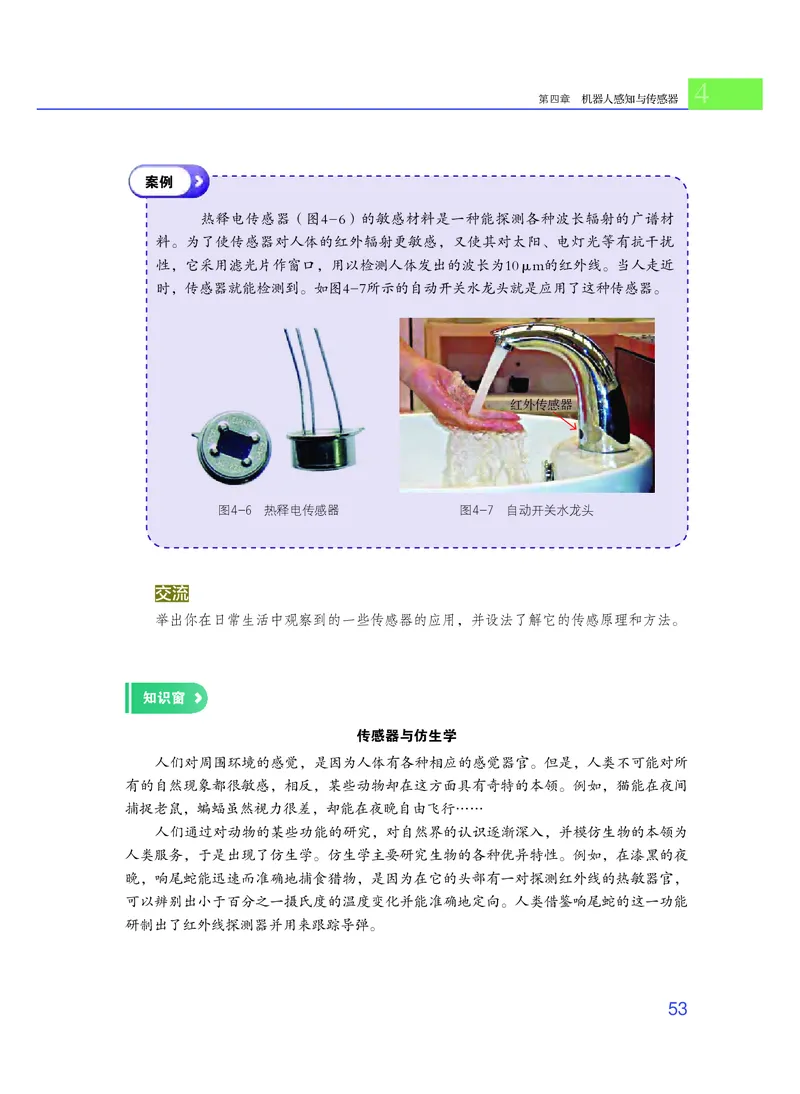
热释电传感器(图4-6)的敏感材料是一种能探测各种波长辐射的广谱材
料。为了使传感器对人体的红外辐射更敏感,又使其对太阳、电灯光等有抗干扰
性,它采用滤光片作窗口,用以检测人体发出的波长为10μm的红外线。当人走近
时,传感器就能检测到。如图4-7所示的自动开关水龙头就是应用了这种传感器。
红外传感器
图4-6 热释电传感器 图4-7 自动开关水龙头
交流
举出你在日常生活中观察到的一些传感器的应用,并设法了解它的传感原理和方法。
知识窗
传感器与仿生学
人们对周围环境的感觉,是因为人体有各种相应的感觉器官。但是,人类不可能对所
有的自然现象都很敏感,相反,某些动物却在这方面具有奇特的本领。例如,猫能在夜间
捕捉老鼠,蝙蝠虽然视力很差,却能在夜晚自由飞行……
人们通过对动物的某些功能的研究,对自然界的认识逐渐深入,并模仿生物的本领为
人类服务,于是出现了仿生学。仿生学主要研究生物的各种优异特性。例如,在漆黑的夜
晚,响尾蛇能迅速而准确地捕食猎物,是因为在它的头部有一对探测红外线的热敏器官,
可以辨别出小于百分之一摄氏度的温度变化并能准确地定向。人类借鉴响尾蛇的这一功能
研制出了红外线探测器并用来跟踪导弹。
053通用技术 选择性必修2 机器人设计与制作
二
第 节 机器人的传感器
学习目标
了解机器人常用传感器的种类和特点。
掌握传感器与控制器的接口电路和制作方法。
情景
购书中心使用了机器人进行导购,创新活动小组的同学都很好奇,星期天相
约去购书中心体验一下。机器人“小慧”是位漂亮的小姑娘,每当有人靠近“小
慧”,她都会热情地上来打招呼。小辉同学问“小慧”:“请问,在哪里有计算机
类图书?”“小慧”眨了下大眼睛,用清脆的声音回答:“计算机类图书在2楼3区
第2排,谢谢! ”
同学们都赞叹“小慧”的“聪明”,“小慧”安装了什么传感器呢?
一、常用传感器
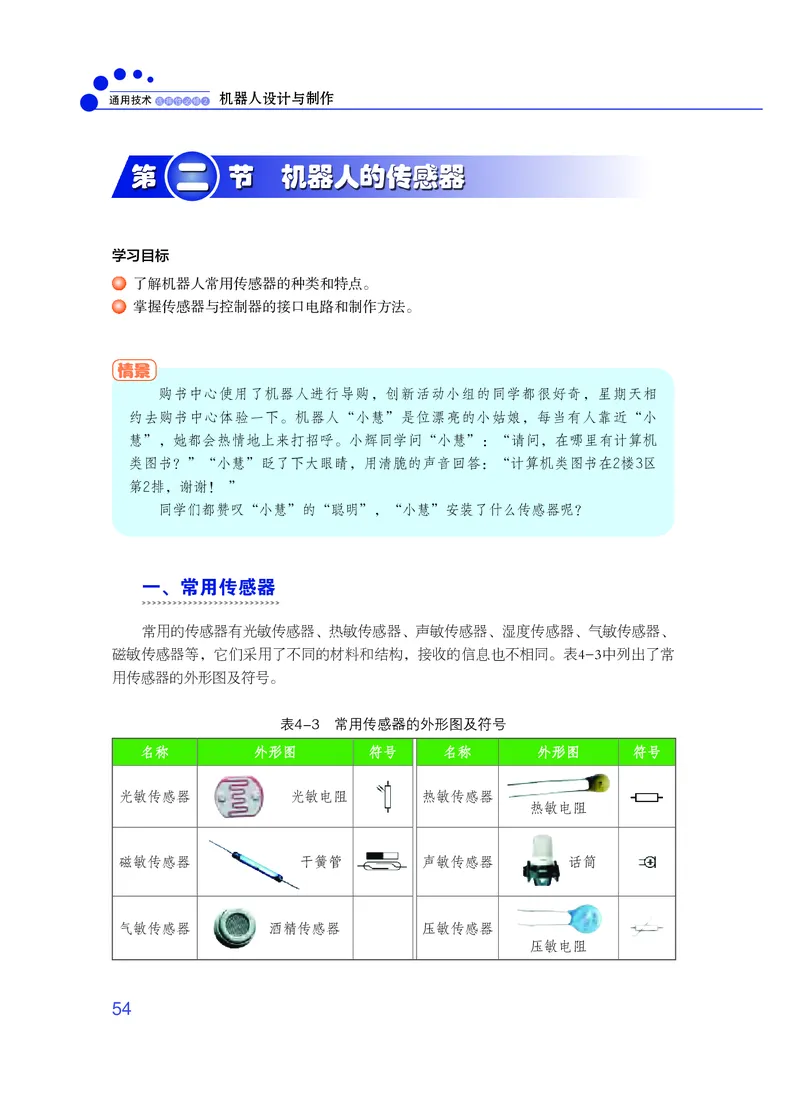
常用的传感器有光敏传感器、热敏传感器、声敏传感器、湿度传感器、气敏传感器、
磁敏传感器等,它们采用了不同的材料和结构,接收的信息也不相同。表4-3中列出了常
用传感器的外形图及符号。
表4-3 常用传感器的外形图及符号
名称 外形图 符号 名称 外形图 符号
光敏传感器 光敏电阻 热敏传感器
热敏电阻
磁敏传感器 干簧管 声敏传感器 话筒
气敏传感器 酒精传感器 压敏传感器
压敏电阻
0544
第四章 机器人感知与传感器
思考
生活、学习中许多方面都可以应用人工智能技术,你想在哪方面做些尝试?你认为可
能用到哪些种类的传感器?
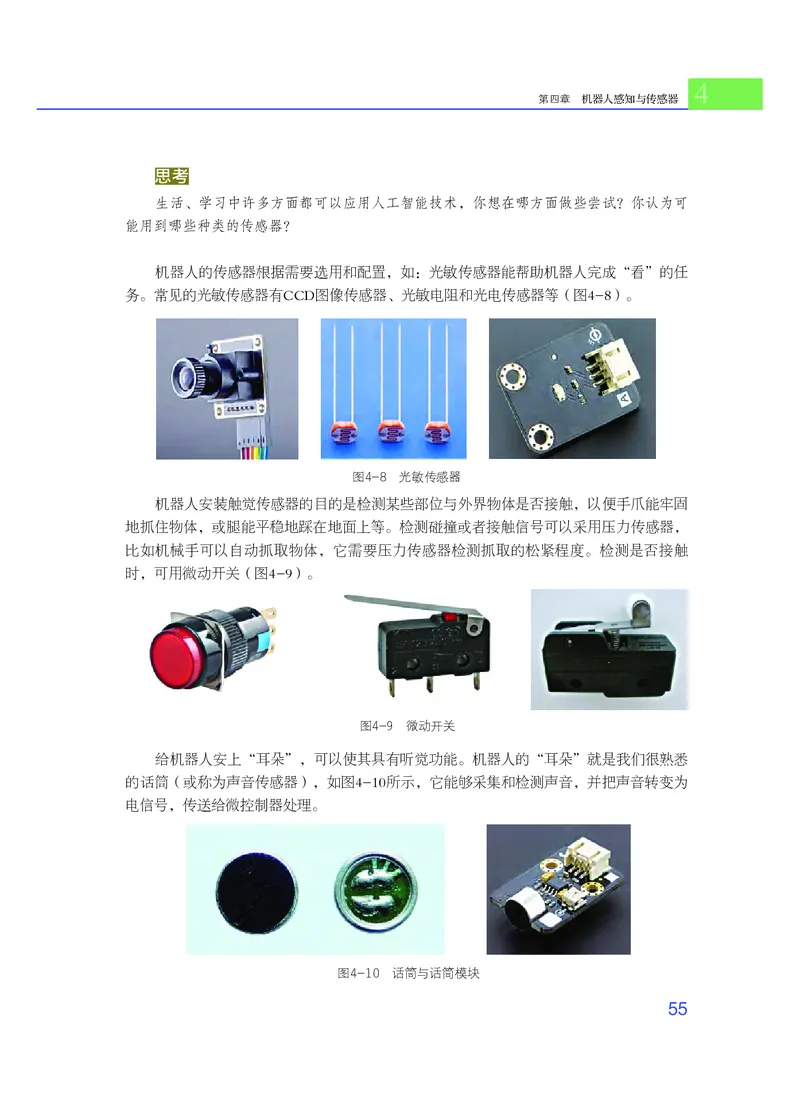
机器人的传感器根据需要选用和配置,如:光敏传感器能帮助机器人完成“看”的任
务。常见的光敏传感器有CCD图像传感器、光敏电阻和光电传感器等(图4-8)。
图4-8 光敏传感器
机器人安装触觉传感器的目的是检测某些部位与外界物体是否接触,以便手爪能牢固
地抓住物体,或腿能平稳地踩在地面上等。检测碰撞或者接触信号可以采用压力传感器,
比如机械手可以自动抓取物体,它需要压力传感器检测抓取的松紧程度。检测是否接触
时,可用微动开关(图4-9)。
图4-9 微动开关
给机器人安上“耳朵”,可以使其具有听觉功能。机器人的“耳朵”就是我们很熟悉
的话筒(或称为声音传感器),如图4-10所示,它能够采集和检测声音,并把声音转变为
电信号,传送给微控制器处理。
图4-10 话筒与话筒模块
055通用技术 选择性必修2 机器人设计与制作
知识窗
超声波传感器
超声波传感器(图4-11)利用压电效应实现超
声波的发射与接收。简易机器人中常常应用超声波传
感器来检测前方物体,其原理是模仿蝙蝠的回声定位
法。发送器发射超声波,根据接收器检测到的回波状
况来判断前方是否有物体,其原理示意可见图4-12。
超声波传感器不但可以检测物体的存在,还可以通过
检测超声波的往返时间来计算距离。
图4-11 超声波传感器
发送器
物体
接收器
图4-12 超声波传感器原理
二、传感器与接口电路
思考
传感器将外界的信息转换成电信号,其中有些是数字信号,有些是模拟信号。如果是
模拟信号,应该怎样处理?
数字信号能够直接传送到微控制器进行数据处理;模拟信号则需要先转换成数字信
号,然后再传送到微处理器进行处理。能够将模拟信号转换成数字信号的器件叫模—数转
换器(简称A/D转换器)。
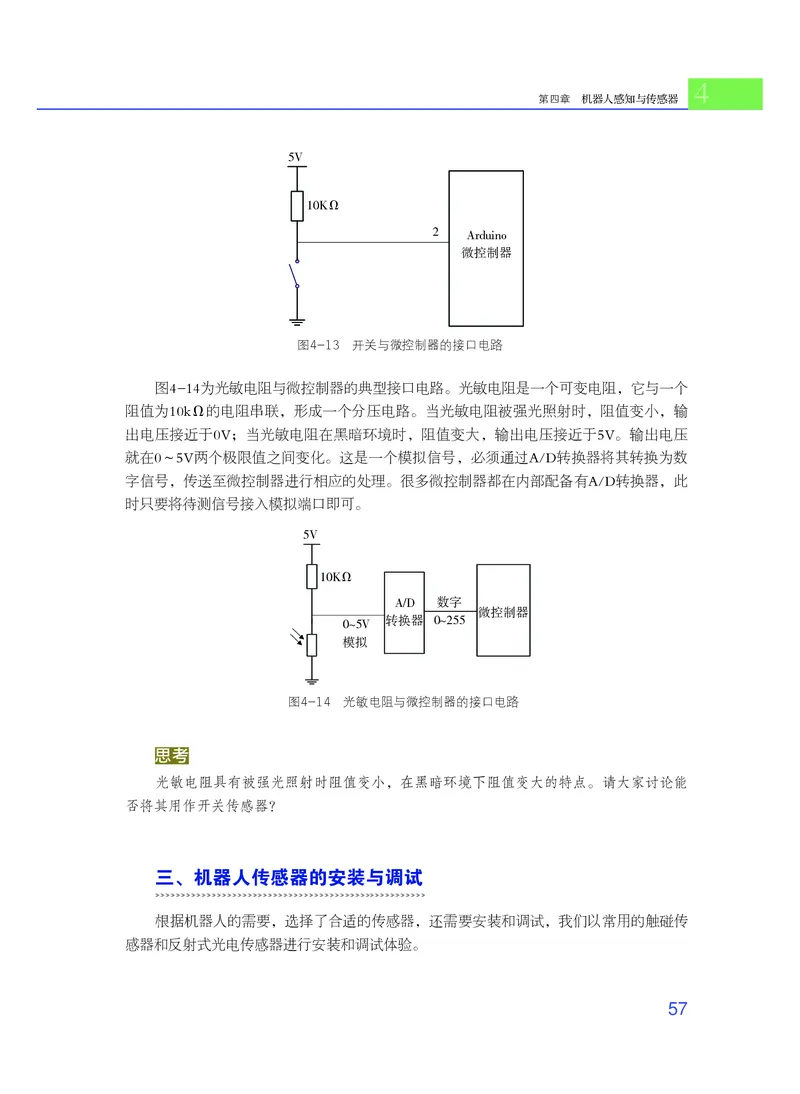
开关直接输出数字信号,它与微控制器的接口电路如图4-13所示。开关的两个引脚分
别接信号线和地线,开关断开时,数字端口2接口得到高电平(逻辑1);开关闭合时,数
字端口2得到低电平(逻辑0)。
0564
第四章 机器人感知与传感器
5(cid:24)V(cid:57)
1100KkΩ(cid:161)
2(cid:21)
Arduino
(cid:39)(cid:88)(cid:74)(cid:91)(cid:79)(cid:84)(cid:85)
(cid:5598)微(cid:6615)控(cid:2150)制器(cid:3224)
图4-13 开关与微控制器的接口电路
图4-14为光敏电阻与微控制器的典型接口电路。光敏电阻是一个可变电阻,它与一个
阻值为10kΩ的电阻串联,形成一个分压电路。当光敏电阻被强光照射时,阻值变小,输
出电压接近于0V;当光敏电阻在黑暗环境时,阻值变大,输出电压接近于5V。输出电压
就在0~5V两个极限值之间变化。这是一个模拟信号,必须通过A/D转换器将其转换为数
字信号,传送至微控制器进行相应的处理。很多微控制器都在内部配备有A/D转换器,此
时只要将待测信号接入模拟端口即可。
5V
10KΩ
A/D 数字
微控制器
转换器 0~255
0~5V
模拟
图4-14 光敏电阻与微控制器的接口电路
思考
光敏电阻具有被强光照射时阻值变小,在黑暗环境下阻值变大的特点。请大家讨论能
否将其用作开关传感器?
三、机器人传感器的安装与调试
根据机器人的需要,选择了合适的传感器,还需要安装和调试,我们以常用的触碰传
感器和反射式光电传感器进行安装和调试体验。
057通用技术 选择性必修2 机器人设计与制作
(一)触碰传感器
普通自锁开关可以用作触碰传感器。利用开关的两种状态,实现不同的命令或选择。
实践
尝试进行触碰传感器的安装、调试。
方法指导
(1)触碰传感器的安装。可以将开关触碰传感器封装,并配置规范的接线口和积木
接口,以便于安装和连线(图4-15)。其与带外壳控制器模块的安装示意如图4-16所示。
触碰传感器接线口和积木接口 触碰按下状态 触碰松开状态
图4-15 触碰传感器及其工作状态
2 3
4 5
图4-16 触碰传感器与带外壳控制器模块的安装示意
(2)用触碰传感器识别开关状态。当触碰传感器接微控制器数字接口,并且为松开状态
时(图4-17),微控制器采集显示
数字接口的值为0,无触碰显示,
控制蜂鸣器不发音。当触碰传感
器接微控制器数字接口,并且为
按下状态时(图4-18),微控制
器采集显示数字接口的值为1,有
触碰显示,同时控制蜂鸣器发音。 图4-17 触碰传感器松开状态 图4-18 触碰传感器按下状态
0584
第四章 机器人感知与传感器
(二)反射式光电传感器
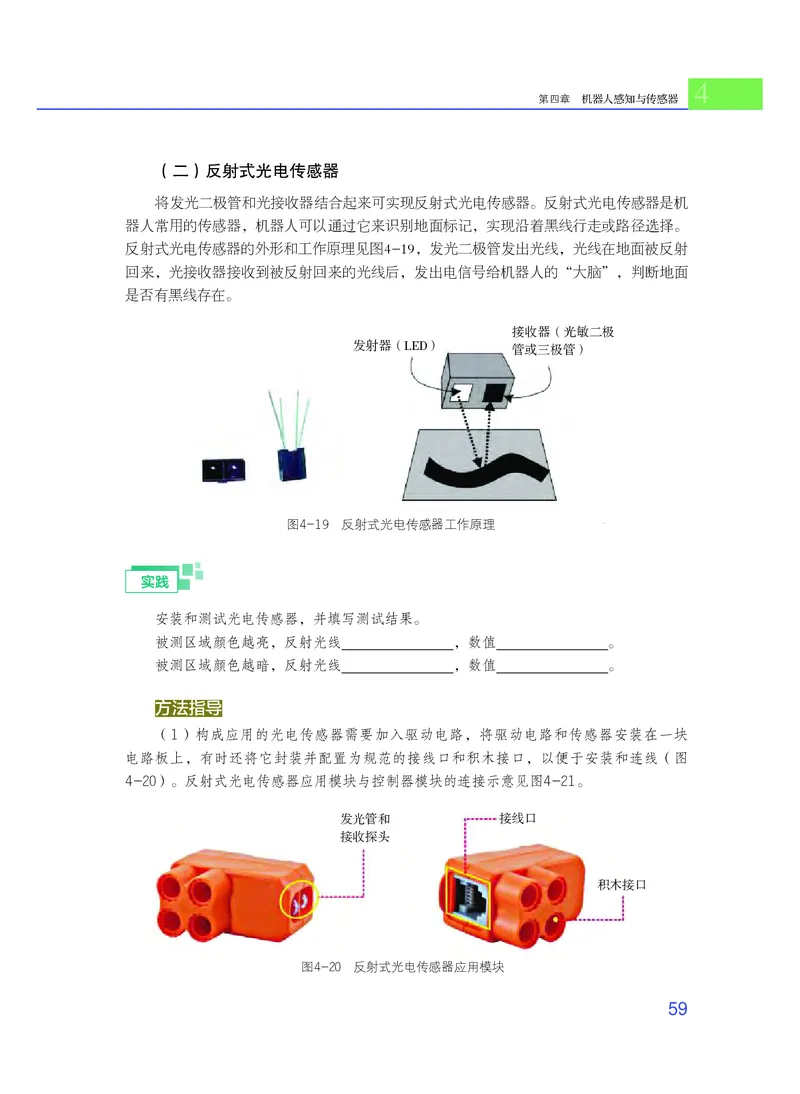
将发光二极管和光接收器结合起来可实现反射式光电传感器。反射式光电传感器是机
器人常用的传感器,机器人可以通过它来识别地面标记,实现沿着黑线行走或路径选择。
反射式光电传感器的外形和工作原理见图4-19,发光二极管发出光线,光线在地面被反射
回来,光接收器接收到被反射回来的光线后,发出电信号给机器人的“大脑”,判断地面
是否有黑线存在。
接收器(光敏二极
发射器(LED)
管或三极管)
图4-19 反射式光电传感器工作原理
实践
安装和测试光电传感器,并填写测试结果。
被测区域颜色越亮,反射光线 ,数值 。
被测区域颜色越暗,反射光线 ,数值 。
方法指导
(1)构成应用的光电传感器需要加入驱动电路,将驱动电路和传感器安装在一块
电路板上,有时还将它封装并配置为规范的接线口和积木接口,以便于安装和连线(图
4-20)。反射式光电传感器应用模块与控制器模块的连接示意见图4-21。
发光管和 接线口
接收探头
积木接口
图4-20 反射式光电传感器应用模块
059通用技术 选择性必修2 机器人设计与制作
2 4
图4-21 光电传感器应用模块与控制器模块的连接示意
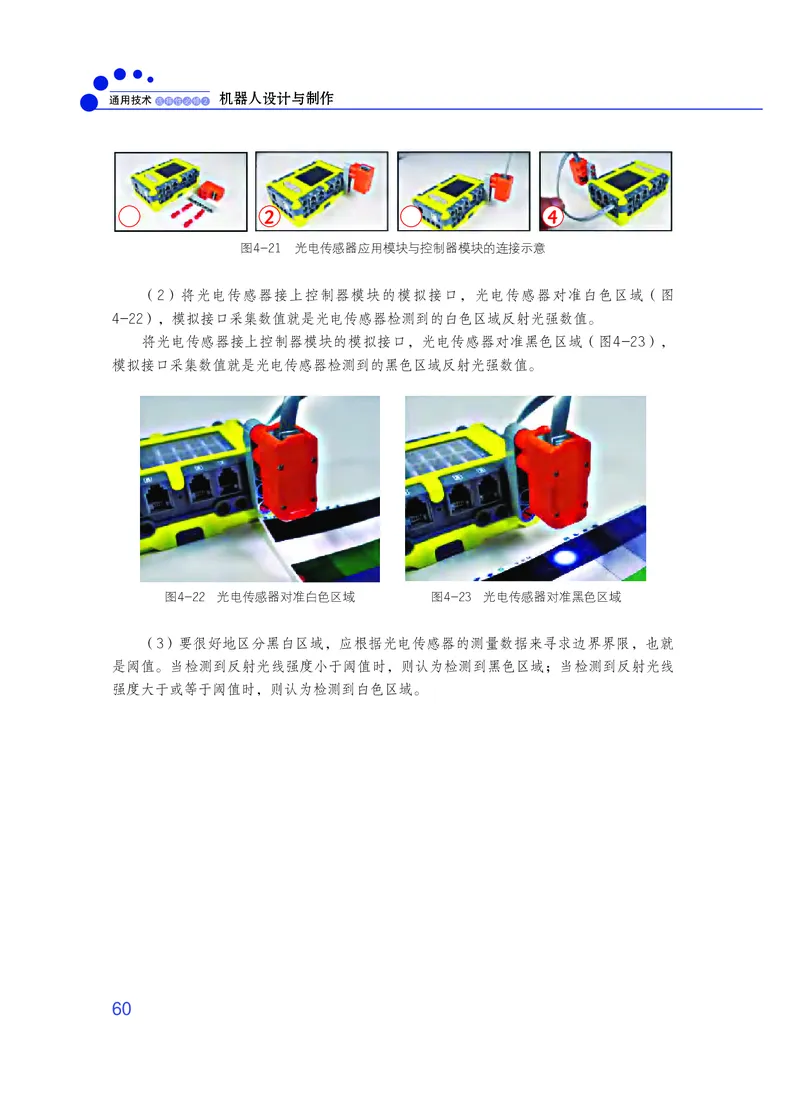
(2)将光电传感器接上控制器模块的模拟接口,光电传感器对准白色区域(图
4-22),模拟接口采集数值就是光电传感器检测到的白色区域反射光强数值。
将光电传感器接上控制器模块的模拟接口,光电传感器对准黑色区域(图4-23),
模拟接口采集数值就是光电传感器检测到的黑色区域反射光强数值。
图4-22 光电传感器对准白色区域 图4-23 光电传感器对准黑色区域
(3)要很好地区分黑白区域,应根据光电传感器的测量数据来寻求边界界限,也就
是阈值。当检测到反射光线强度小于阈值时,则认为检测到黑色区域;当检测到反射光线
强度大于或等于阈值时,则认为检测到白色区域。
0604
第四章 机器人感知与传感器
三
第 节 带感知机器人的设计与制作
学习目标
根据机器人的功能要求选择、安装与调试传感器。
经历设计和制作机器人的过程,熟悉机器人设计和制作的一般过程和方法。
情景
在学校组织的机器人设计制作比赛中,刘辉小组设计的机器人能沿着设定的路
线前行,不但能避让其他机器人,还能夹起障碍物,表现出色,获得了比赛的优秀
奖。你想知道它是如何设计和制作的吗?
一、传感器的选择与应用
要设计出色的机器人,选择或利用传感器十分关键。例如:让光电编码器与电机轴或者
转动部件连接,就可通过编码器读出电机或者转动部件的转动角度来估计位置;利用陀螺原
理制作的传感器,可用于测量移动机器人的姿态;通过光电传感器或红外传感器可实现巡
线任务;通过超声传感器、红外传感器、视觉传感器和激光测距仪等可以实现避障功能。
(一)巡线
在机器人竞赛中,“巡线”特指让机器人沿着场地中一条固定线路(通常是黑线)行
进的任务。这种机器人小车一般由两个动力轮和一个万向轮构成,通过左右轮反转或其中
一个轮停转来实现转向,前者的转向中心位于两轮连线中点,后者转向中心位于停止不动
的轮上。
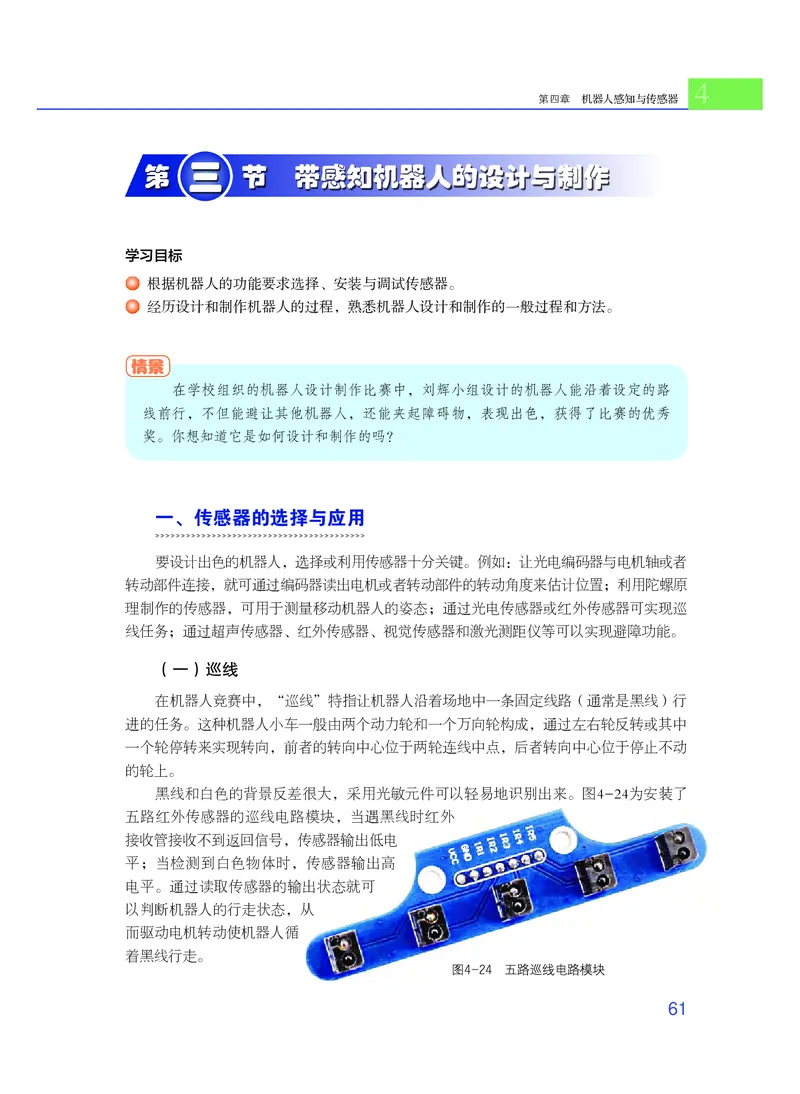
黑线和白色的背景反差很大,采用光敏元件可以轻易地识别出来。图4-24为安装了
五路红外传感器的巡线电路模块,当遇黑线时红外
接收管接收不到返回信号,传感器输出低电
平;当检测到白色物体时,传感器输出高
电平。通过读取传感器的输出状态就可
以判断机器人的行走状态,从
而驱动电机转动使机器人循
着黑线行走。
061通用技术 选择性必修2 机器人设计与制作
(二)避障
避障是指移动机器人在行走过程中,通过传感器感知到其通行路线上存在静态或动态
障碍物时,按照一定的算法实时进行更新路径,最后达到目标点。实现避障的必要条件是
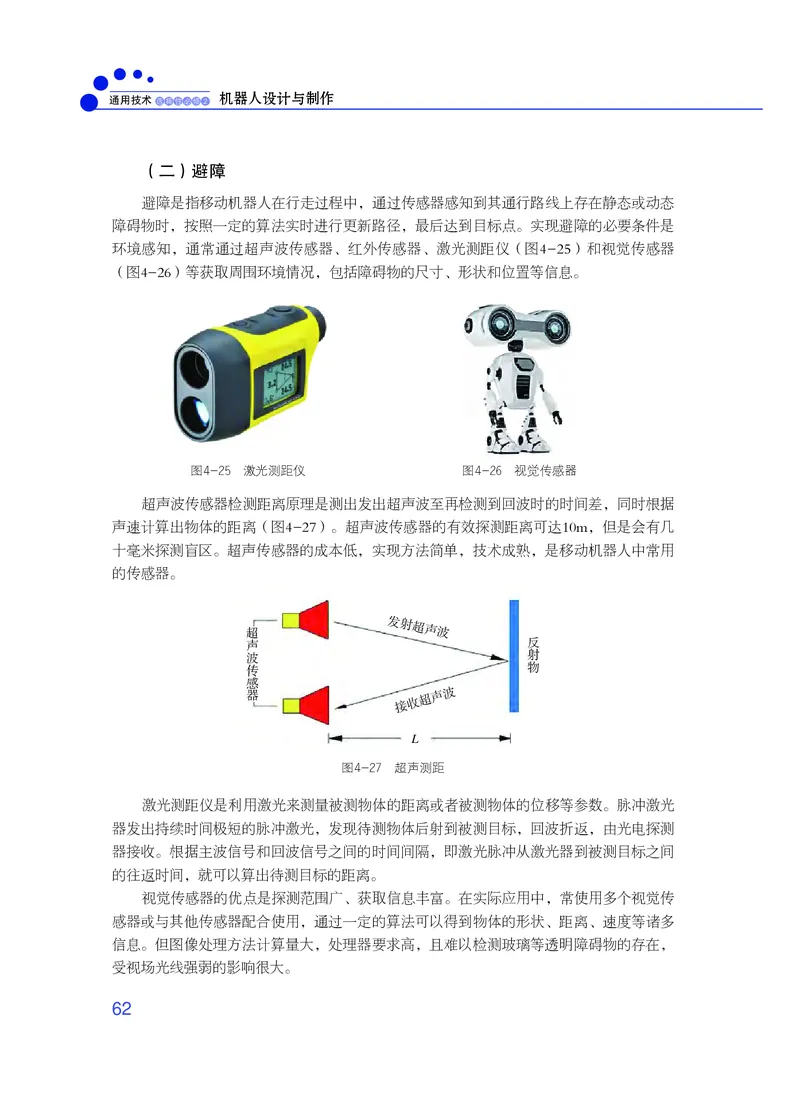
环境感知,通常通过超声波传感器、红外传感器、激光测距仪(图4-25)和视觉传感器
(图4-26)等获取周围环境情况,包括障碍物的尺寸、形状和位置等信息。
图4-25 激光测距仪 图4-26 视觉传感器
超声波传感器检测距离原理是测出发出超声波至再检测到回波时的时间差,同时根据
声速计算出物体的距离(图4-27)。超声波传感器的有效探测距离可达10m,但是会有几
十毫米探测盲区。超声传感器的成本低,实现方法简单,技术成熟,是移动机器人中常用
的传感器。
超
发射超声波
声 反
波 射
传 物
感
器 接收超声波
LL
图4-27 超声测距
激光测距仪是利用激光来测量被测物体的距离或者被测物体的位移等参数。脉冲激光
器发出持续时间极短的脉冲激光,发现待测物体后射到被测目标,回波折返,由光电探测
器接收。根据主波信号和回波信号之间的时间间隔,即激光脉冲从激光器到被测目标之间
的往返时间,就可以算出待测目标的距离。
视觉传感器的优点是探测范围广、获取信息丰富。在实际应用中,常使用多个视觉传
感器或与其他传感器配合使用,通过一定的算法可以得到物体的形状、距离、速度等诸多
信息。但图像处理方法计算量大,处理器要求高,且难以检测玻璃等透明障碍物的存在,
受视场光线强弱的影响很大。
0624
第四章 机器人感知与传感器
二、带外界感知的轮式机器人的制作与编程
实践
搭建一个简易轮式机器人(图4-28),能够实现直线行走、巡黑线、检测并夹起障
碍物或避让,并能根据路面的标记实现路径规划。
图4-28 轮式机器人
方法指导
1.所需要的电子部件
整体结构为双驱动轮式机器人,使用的电子部件包括1个微控制器,3个电机,2个
光电传感器,1个触碰传感器,1个红外传感器。光电传感器用于巡线中的黑线检测,
红外传感器用于障碍物检测或避让,触碰传感器用于启动控制。要使用的电子部件(图
4-29)。
触碰传感器 光电传感器
微控制器
红外传感器
电机
图4-29 轮式机器人的电子部件
063通用技术 选择性必修2 机器人设计与制作
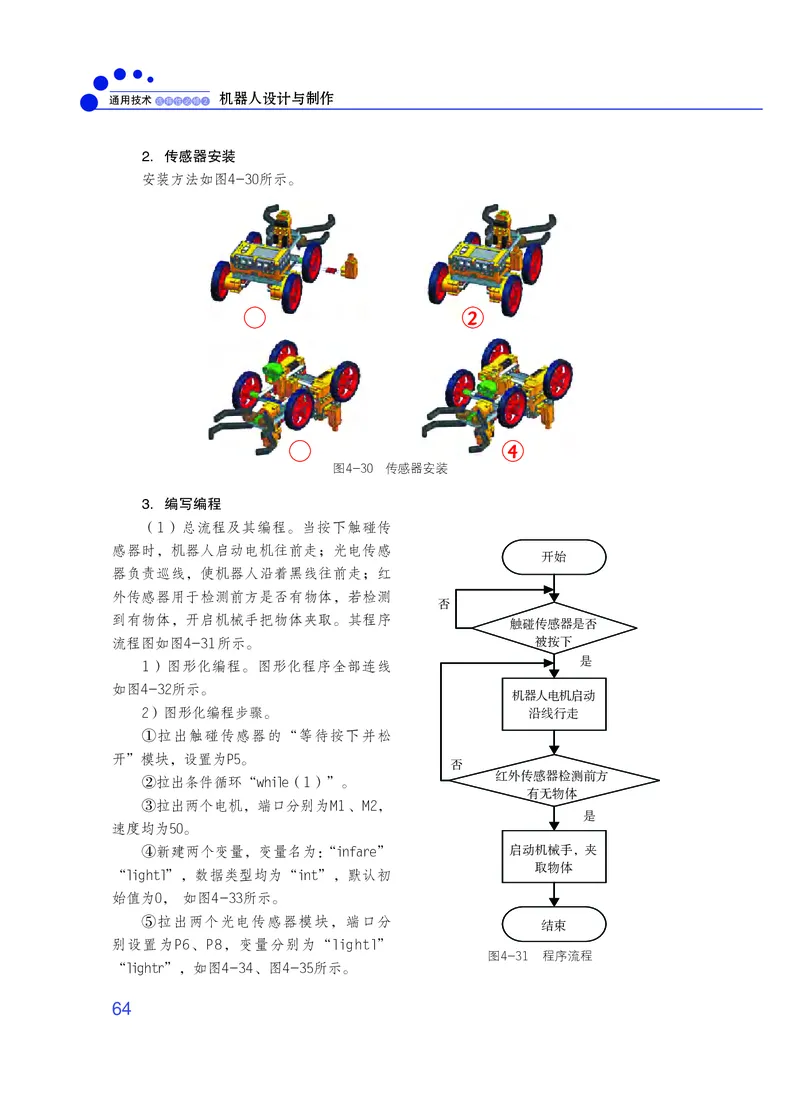
2.传感器安装
安装方法如图4-30所示。
2
4
图4-30 传感器安装
3.编写编程
(1)总流程及其编程。当按下触碰传
感器时,机器人启动电机往前走;光电传感
开始
器负责巡线,使机器人沿着黑线往前走;红
外传感器用于检测前方是否有物体,若检测
否
到有物体,开启机械手把物体夹取。其程序
触碰传感器是否
流程图如图4-31所示。 被按下
是
1)图形化编程。图形化程序全部连线
如图4-32所示。
机器人电机启动
2)图形化编程步骤。 沿线行走
①拉出触碰传感器的“等待按下并松
开”模块,设置为P5。
否
红外传感器检测前方
②拉出条件循环“while(1)”。
有无物体
③拉出两个电机,端口分别为M1、M2,
是
速度均为50。
④新建两个变量,变量名为:“infare” 启动机械手,夹
取物体
“lightl”,数据类型均为“int”,默认初
始值为0, 如图4-33所示。
⑤拉出两个光电传感器模块,端口分
结束
别设置为P6、P8,变量分别为“lightl”
图4-31 程序流程
“lightr”,如图4-34、图4-35所示。
0644
第四章 机器人感知与传感器
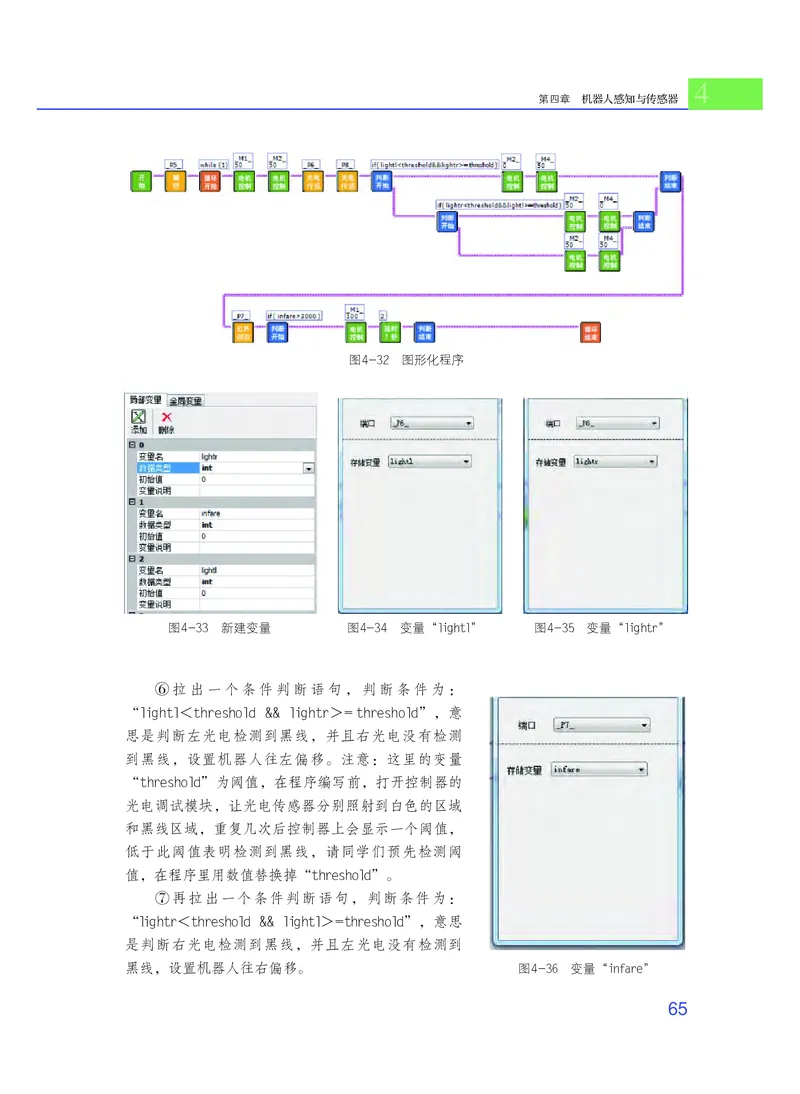
图4-32 图形化程序
图4-33 新建变量 图4-34 变量“lightl” 图4-35 变量“lightr”
⑥拉出一个条件判断语句,判断条件为:
“lightl<threshold && lightr>= threshold”,意
思是判断左光电检测到黑线,并且右光电没有检测
到黑线,设置机器人往左偏移。注意:这里的变量
“threshold”为阈值,在程序编写前,打开控制器的
光电调试模块,让光电传感器分别照射到白色的区域
和黑线区域,重复几次后控制器上会显示一个阈值,
低于此阈值表明检测到黑线,请同学们预先检测阈
值,在程序里用数值替换掉“threshold”。
⑦再拉出一个条件判断语句,判断条件为:
“lightr<threshold && lightl>=threshold”,意思
是判断右光电检测到黑线,并且左光电没有检测到
黑线,设置机器人往右偏移。 图4-36 变量“infare”
065通用技术 选择性必修2 机器人设计与制作
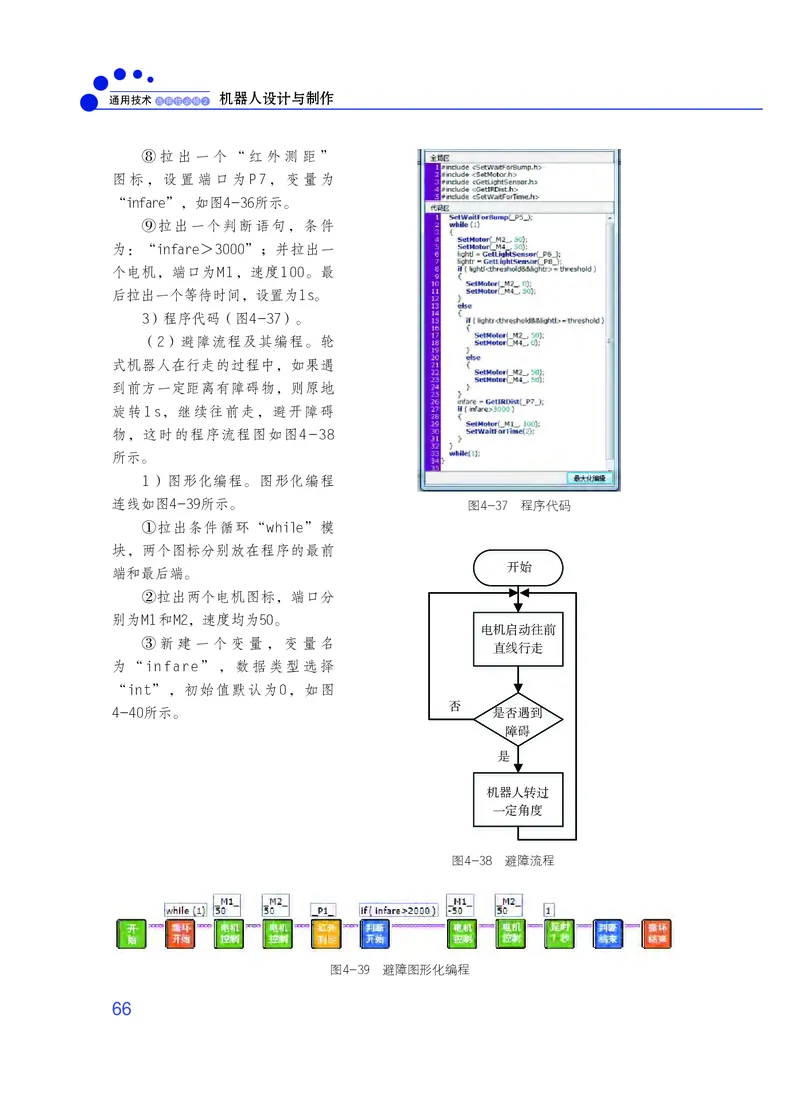
⑧拉出一个“红外测距”
图标,设置端口为P7,变量为
“infare”,如图4-36所示。
⑨拉出一个判断语句,条件
为:“infare>3000”;并拉出一
个电机,端口为M1,速度100。最
后拉出一个等待时间,设置为1s。
3)程序代码(图4-37)。
(2)避障流程及其编程。轮
式机器人在行走的过程中,如果遇
到前方一定距离有障碍物,则原地
旋转1s,继续往前走,避开障碍
物,这时的程序流程图如图4-38
所示。
1)图形化编程。图形化编程
连线如图4-39所示。 图4-37 程序代码
①拉出条件循环“while”模
块,两个图标分别放在程序的最前
开始
端和最后端。
②拉出两个电机图标,端口分
别为M1和M2,速度均为50。
电机启动往前
③新建一个变量,变量名
直线行走
为“infare”,数据类型选择
“int”,初始值默认为0,如图
否
4-40所示。 是否遇到
障碍
是
机器人转过
一定角度
图4-38 避障流程
图4-39 避障图形化编程
0664
第四章 机器人感知与传感器
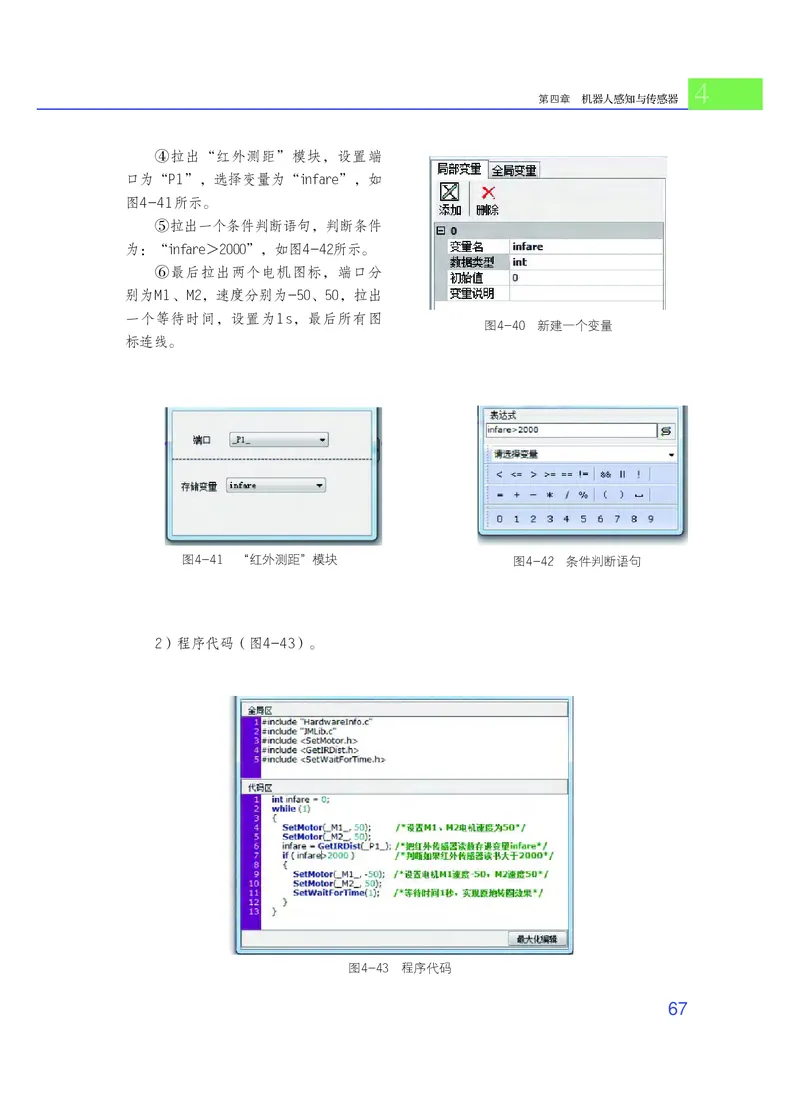
④拉出“红外测距”模块,设置端
口为“P1”,选择变量为“infare”,如
图4-41所示。
⑤拉出一个条件判断语句,判断条件
为:“infare>2000”,如图4-42所示。
⑥最后拉出两个电机图标,端口分
别为M1、M2,速度分别为-50、50,拉出
一个等待时间,设置为1s,最后所有图
图4-40 新建一个变量
标连线。
图4-41 “红外测距”模块 图4-42 条件判断语句
2)程序代码(图4-43)。
图4-43 程序代码
067通用技术 选择性必修2 机器人设计与制作
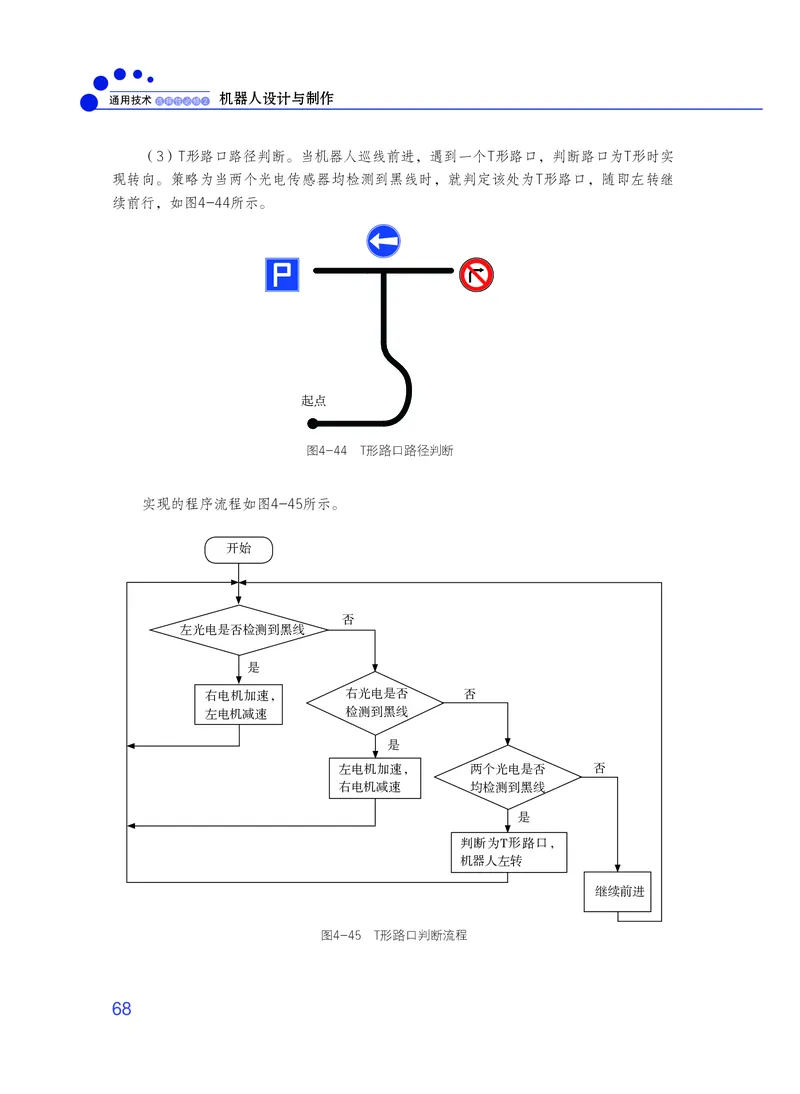
(3)T形路口路径判断。当机器人巡线前进,遇到一个T形路口,判断路口为T形时实
现转向。策略为当两个光电传感器均检测到黑线时,就判定该处为T形路口,随即左转继
续前行,如图4-44所示。
(cid:17319)起点(cid:9961)
图4-44 T形路口路径判断
实现的程序流程如图4-45所示。
开始
否
左光电是否检测到黑线
是
右电机加速, 右光电是否 否
左电机减速 检测到黑线
是
左电机加速, 两个光电是否 否
右电机减速 均检测到黑线
是
判断为T形路口,
机器人左转
继续前进
图4-45 T形路口判断流程
0684
第四章 机器人感知与传感器
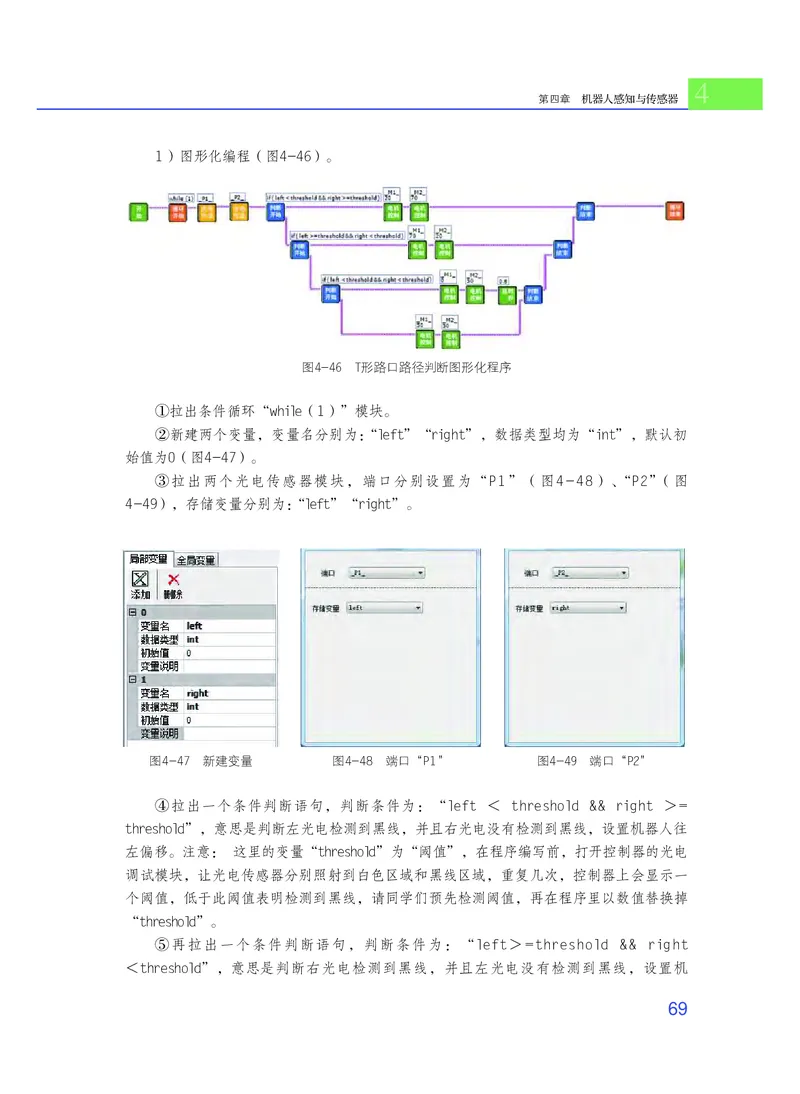
1)图形化编程(图4-46)。
图4-46 T形路口路径判断图形化程序
①拉出条件循环“while(1)”模块。
②新建两个变量,变量名分别为:“left”“right”,数据类型均为“int”,默认初
始值为0(图4-47)。
③拉出两个光电传感器模块,端口分别设置为“P1”(图4-48)、“P2”(图
4-49),存储变量分别为:“left”“right”。
图4-47 新建变量 图4-48 端口“P1” 图4-49 端口“P2”
④拉出一个条件判断语句,判断条件为:“left < threshold && right >=
threshold”,意思是判断左光电检测到黑线,并且右光电没有检测到黑线,设置机器人往
左偏移。注意: 这里的变量“threshold”为“阈值”,在程序编写前,打开控制器的光电
调试模块,让光电传感器分别照射到白色区域和黑线区域,重复几次,控制器上会显示一
个阈值,低于此阈值表明检测到黑线,请同学们预先检测阈值,再在程序里以数值替换掉
“threshold”。
⑤再拉出一个条件判断语句,判断条件为:“left>=threshold && right
<threshold”,意思是判断右光电检测到黑线,并且左光电没有检测到黑线,设置机
069通用技术 选择性必修2 机器人设计与制作
器人往右偏移。
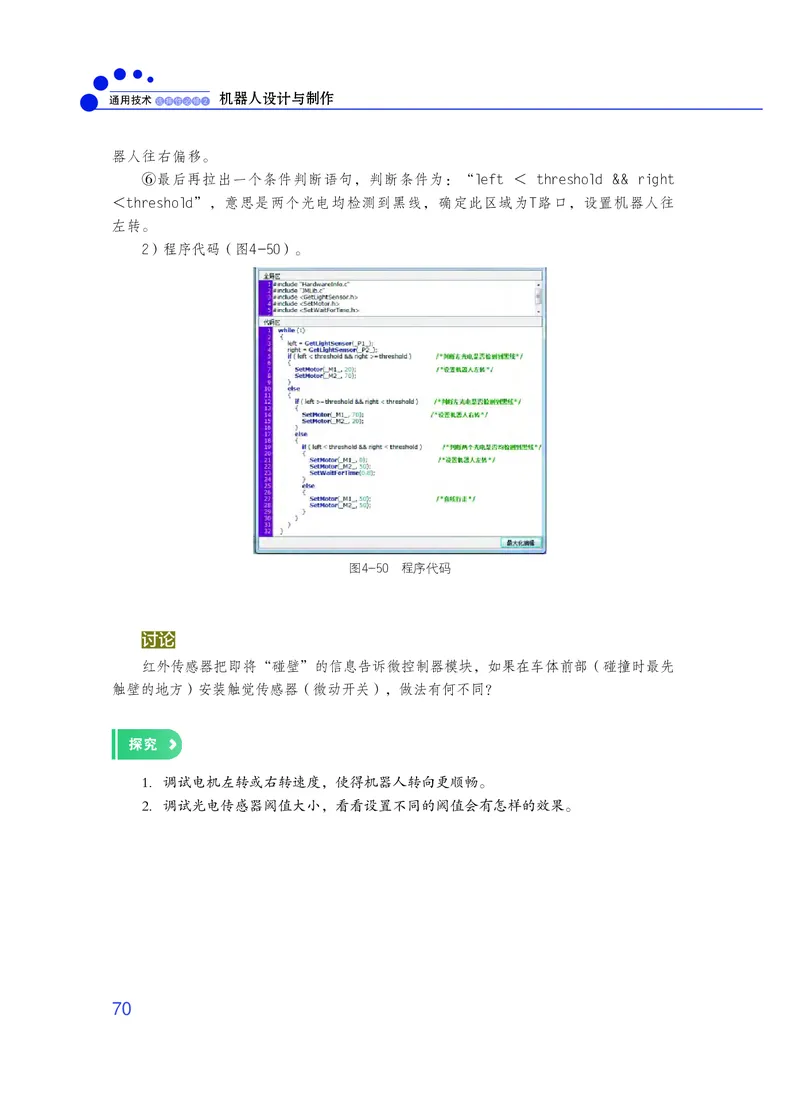
⑥最后再拉出一个条件判断语句,判断条件为:“left < threshold && right
<threshold”,意思是两个光电均检测到黑线,确定此区域为T路口,设置机器人往
左转。
2)程序代码(图4-50)。
图4-50 程序代码
讨论
红外传感器把即将“碰壁”的信息告诉微控制器模块,如果在车体前部(碰撞时最先
触壁的地方)安装触觉传感器(微动开关),做法有何不同?
探究
1.调试电机左转或右转速度,使得机器人转向更顺畅。
2.调试光电传感器阈值大小,看看设置不同的阈值会有怎样的效果。
0704
第四章 机器人感知与传感器
综合学习活动
1.用反射式红外传感器和微控制器设计能够检测黑线的控制电路。当传感器检测到
黑线时,蜂鸣器发出报警声。
2.用光敏传感器、微控制器和蜂鸣器等设计和安装一个遮光报警装置。
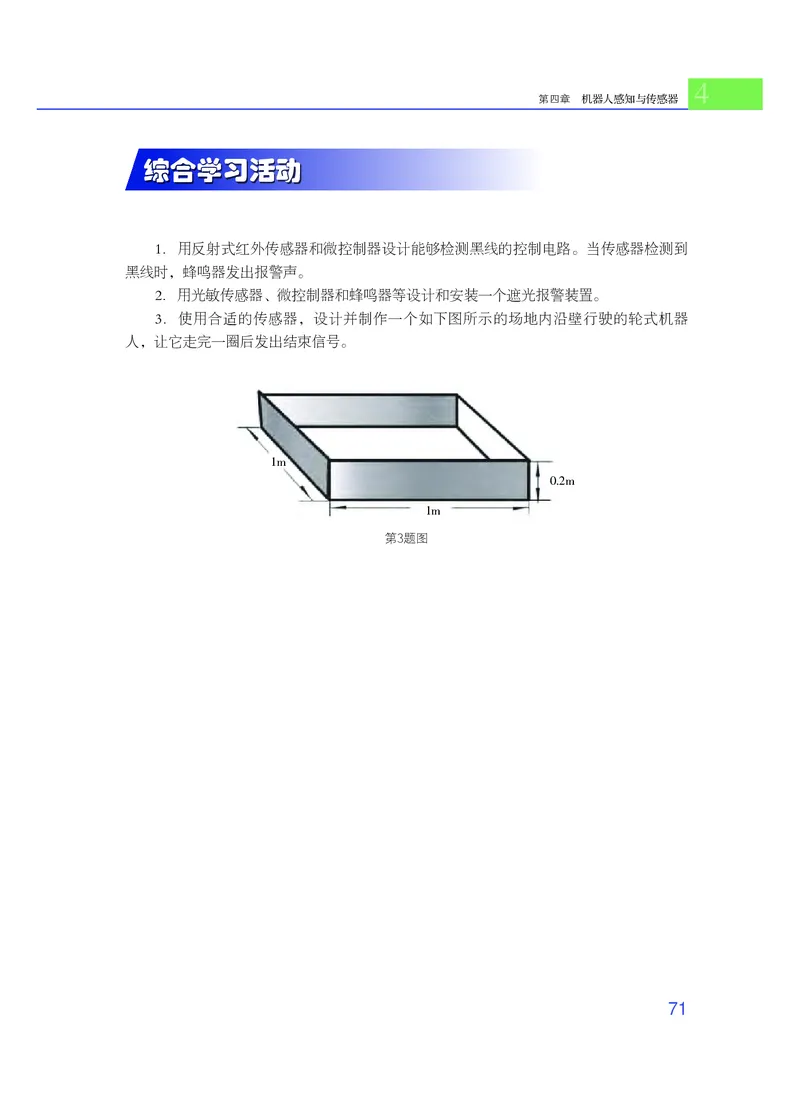
3.使用合适的传感器,设计并制作一个如下图所示的场地内沿壁行驶的轮式机器
人,让它走完一圈后发出结束信号。
1m
0.2m
1m
第3题图
071通用技术 选择性必修2 机器人设计与制作
本章回顾与评价
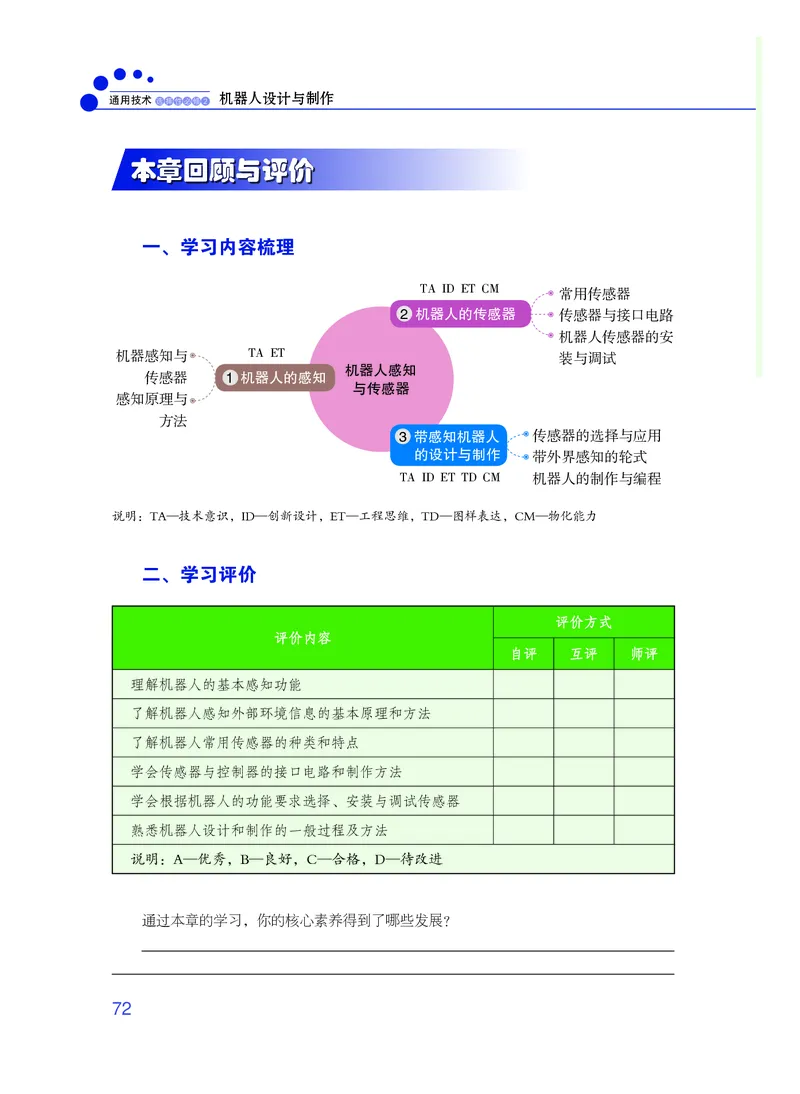
一、学习内容梳理
TA ID ET CM
常用传感器
2 机器人的传感器 传感器与接口电路
机器人传感器的安
机器感知与 TA ET 装与调试
机器人感知
传感器 1 机器人的感知
与传感器
感知原理与
方法
3 带感知机器人 传感器的选择与应用
的设计与制作 带外界感知的轮式
TA ID ET TD CM 机器人的制作与编程
说明:TA—技术意识,ID—创新设计,ET—工程思维,TD—图样表达,CM—物化能力
二、学习评价
评价方式
评价内容
自评 互评 师评
理解机器人的基本感知功能
了解机器人感知外部环境信息的基本原理和方法
了解机器人常用传感器的种类和特点
学会传感器与控制器的接口电路和制作方法
学会根据机器人的功能要求选择、安装与调试传感器
熟悉机器人设计和制作的一般过程及方法
说明:A—优秀,B—良好,C—合格,D—待改进
通过本章的学习,你的核心素养得到了哪些发展?
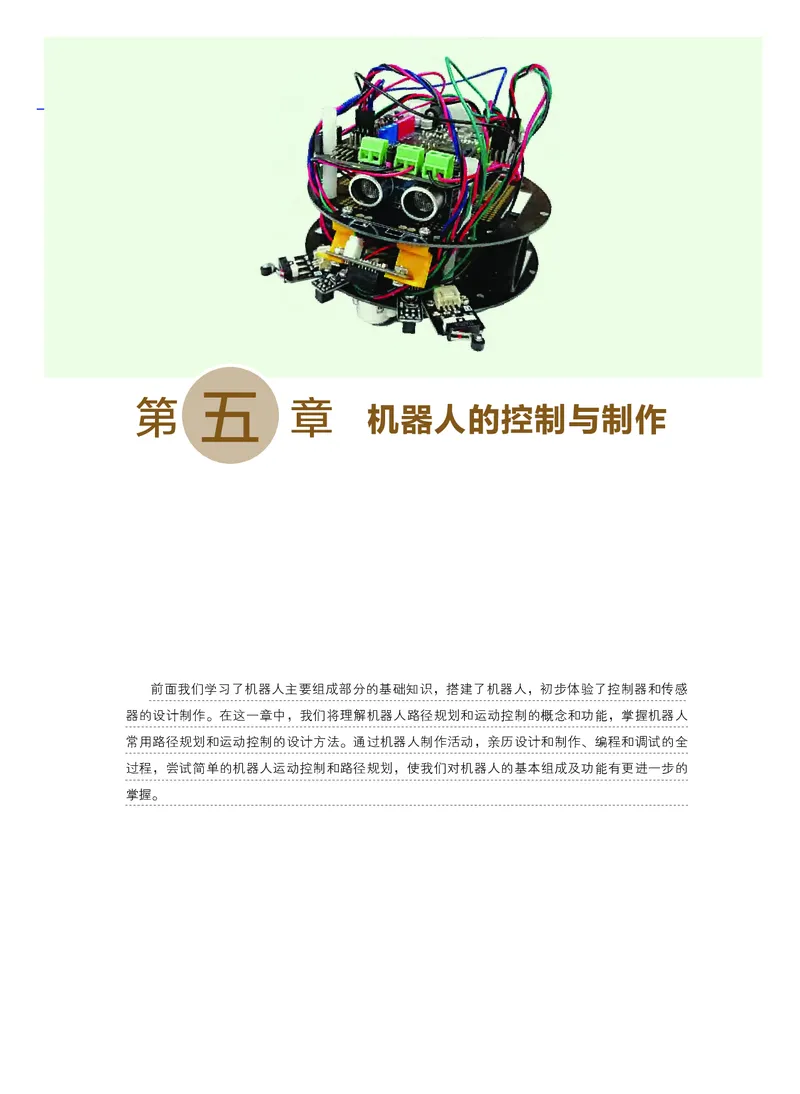
072五
第 章
机器人的控制与制作
前面我们学习了机器人主要组成部分的基础知识,搭建了机器人,初步体验了控制器和传感
器的设计制作。在这一章中,我们将理解机器人路径规划和运动控制的概念和功能,掌握机器人
常用路径规划和运动控制的设计方法。通过机器人制作活动,亲历设计和制作、编程和调试的全
过程,尝试简单的机器人运动控制和路径规划,使我们对机器人的基本组成及功能有更进一步的
掌握。通用技术 选择性必修2 机器人设计与制作
一
第 节 机器人的路径规划和运动控制
学习目标
理解简单的机器人路径规划与运动控制的概念和功能。
掌握利用栅格建模法对机器人移动路径进行规划和运动控制。
情景
酒店中的送餐机器人,从厨房出发,最后把饭菜送到客人的餐桌上。如何为机器
人寻找一条连续的最优的路径,又如何让机器人避免与走动的人员或固定的障碍物发
生碰撞呢?
要解决送餐机器人最优的路径和避免与走动的人员或固定的障碍物发生碰撞问题,需
要对机器人进行路径规划和运动控制。
1.路径规划
路径规划是机器人设计中的一项重要内容,它是指机器人根据自身任务的需要,按照
一定的评价准则(时间最短,距离最短,能耗最少等),寻找一条从起始位置到目标位置
的路径。
路径规划的方法多种多样,经过研究人员几十年的研究,已经提出例如栅格建模法、
自由空间法、可视图法、人工势场法、模糊逻辑算法、神经网络法、遗传算法等。应用中
较为常见的是栅格建模法。
2.运动控制
运动控制主要包括对机器人的位置控制、速度控制、加速度控制、转矩或力矩控
制等。
按照动力驱动方式的不同,机器人的动力驱动一般可分为电机驱动、压缩空气驱动和
液压驱动等。其中采用电机驱动的机器人较多,特别是在人形机器人和移动机器人中,
需要通过程序及驱动电路对多个电机进行控制,从而对机器人的运动进行控制。
0745
第五章 机器人的控制与制作
知识窗
栅格建模法是由Howden在1986年提出的一种广泛应用于移动机器人全局路径规划的方
法。它是使用大小相同的栅格对机器人所在的二维空间进行划分,每个栅格的大小一般以机
器人自身的尺寸为准。如果在某个栅格的范围内没有障碍物,则该栅格称为自由栅格;反之
则称为障碍栅格。在这个方法中,机器人所在的环境量化成一系列具有二值信息的网络单元。
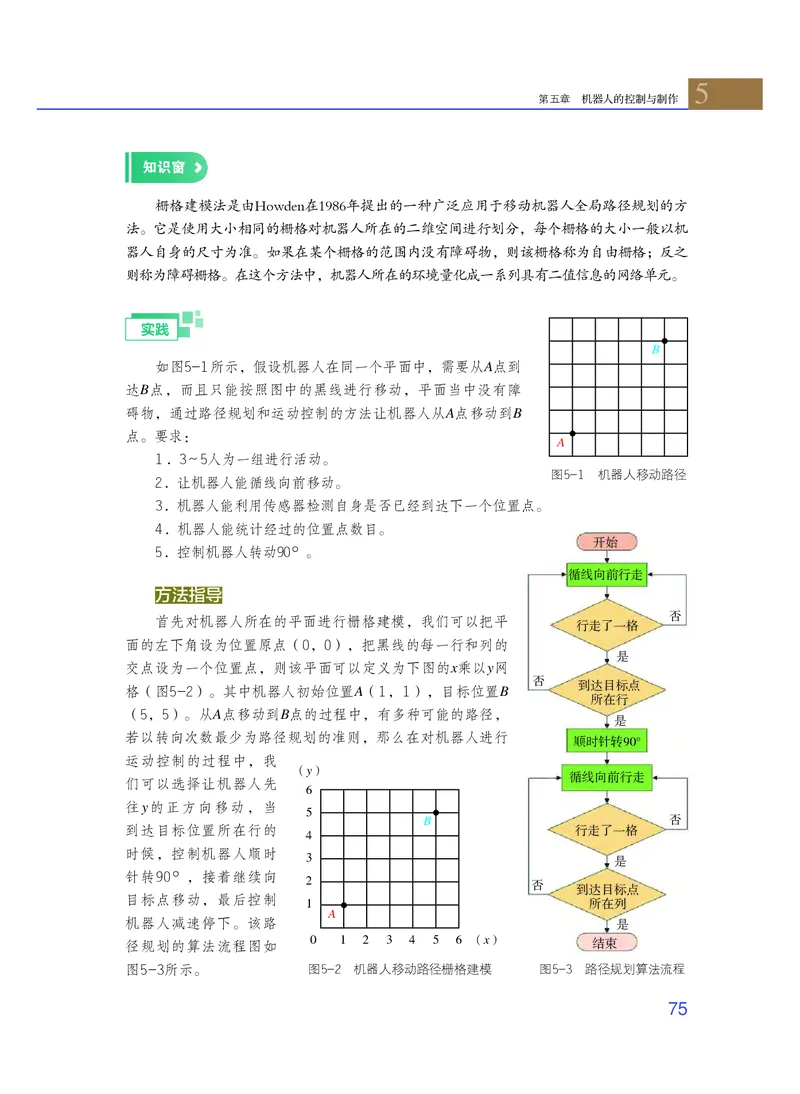
实践
B
如图5-1所示,假设机器人在同一个平面中,需要从A点到
达B点,而且只能按照图中的黑线进行移动,平面当中没有障
碍物,通过路径规划和运动控制的方法让机器人从A点移动到B
点。要求:
A
1.3~5人为一组进行活动。
图5-1 机器人移动路径
2.让机器人能循线向前移动。
3.机器人能利用传感器检测自身是否已经到达下一个位置点。
4.机器人能统计经过的位置点数目。
开始
5.控制机器人转动90°。
循线向前行走
方法指导
否
首先对机器人所在的平面进行栅格建模,我们可以把平
行走了一格
面的左下角设为位置原点(0,0),把黑线的每一行和列的
是
交点设为一个位置点,则该平面可以定义为下图的x乘以y网
否
到达目标点
格(图5-2)。其中机器人初始位置A(1,1),目标位置B
所在行
(5,5)。从A点移动到B点的过程中,有多种可能的路径,
是
若以转向次数最少为路径规划的准则,那么在对机器人进行
顺时针转90°
运动控制的过程中,我
(y)
循线向前行走
们可以选择让机器人先
6
往y的正方向移动,当
5
B 否
到达目标位置所在行的 行走了一格
4
时候,控制机器人顺时
3
是
针转90°,接着继续向
2
否
到达目标点
目标点移动,最后控制
1 所在列
A
机器人减速停下。该路 是
0 1 2 3 4 5 6 (x)
径规划的算法流程图如 结束
图5-3所示。 图5-2 机器人移动路径栅格建模 图5-3 路径规划算法流程
075通用技术 选择性必修2 机器人设计与制作
二
第 节 机器人的控制与制作活动
学习目标
熟悉一种机器人平台的硬件和软件系统,以及计算机编程语言及其调试环境。
掌握编制计算机程序,实现简单的机器人路径规划和运动控制的方法,并能完成程序
调试和程序下载。
通过前面的学习,我们对机器人的组成和原理有了一定的了解。这一节,我们将通
过制作活动,进一步培养创新精神和动手能力。
机器人的制作是一个复杂的过程。下面让我们通过实践体悟机器人的制作过程,发
挥自己的创造能力,设计出符合项目要求的机器人。
一、自动循迹机器人的制作
循迹机器人是一种按照给定路线(使用黑线标识引导)自动进行移动的机器人,它综
合运用了传感器、信号处理、电机驱动和自动控制程序设计等技术来实现地面标识检测、
障碍避让、路线规划和自动行驶。循迹机器人在生活中有着广泛的应用,例如自动化生产
车间中的物料配送机器人、餐厅里的送餐机器人、商场或银行里的机器人助理等。
实践
在地面任意白色水平面上绘制1条黑色标识线(如在地面绘制如图5-4所示的路
线),设计制作自动循迹机器人,让机器人从该路线中的任何一个位置出发,都能够顺
利地沿着路线走下去。
图5-4 黑色标识线示例
0765
第五章 机器人的控制与制作
要求:
①分析机器人的行走策略,规划合适的行走路线,控制机器人实地行走。
②帮助机器人在撞到障碍物时,及时后退,继续行走。
③设计机器人可以循着黑线行走的程序流程图,完成程序编写和调试。
④观察机器人循迹行走的过程,分析成功和失败的原因,提出优化的方案并实施。
方法指导
机器人制作的第一步就是设计,机器人的设计实际上有两个重要内容:硬件设计和软
件设计。如果我们把硬件看成是机器人的躯体,软件就是机器人的灵魂。硬件使机器人具
有行走、感觉的能力,软件使其具有思考、判断、控制的能力。
1.硬件设计
硬件上可采用轮式机器人平台,该机器人依靠左、右两个电机带动车轮进行移动。
通过程序对电机的控制可以实现向前、后退、左转和右转等运动,应用两对光电传感器分
置于机器人前部并照射于地面黑线的左右两端(略大于黑线的宽度),就可以检测机器人
是否在黑色标识线上方,利用红外传感器、超声波传感器或碰撞传感器都可以使机器人
“看”到前方的障碍物,并通过编程进行避让。
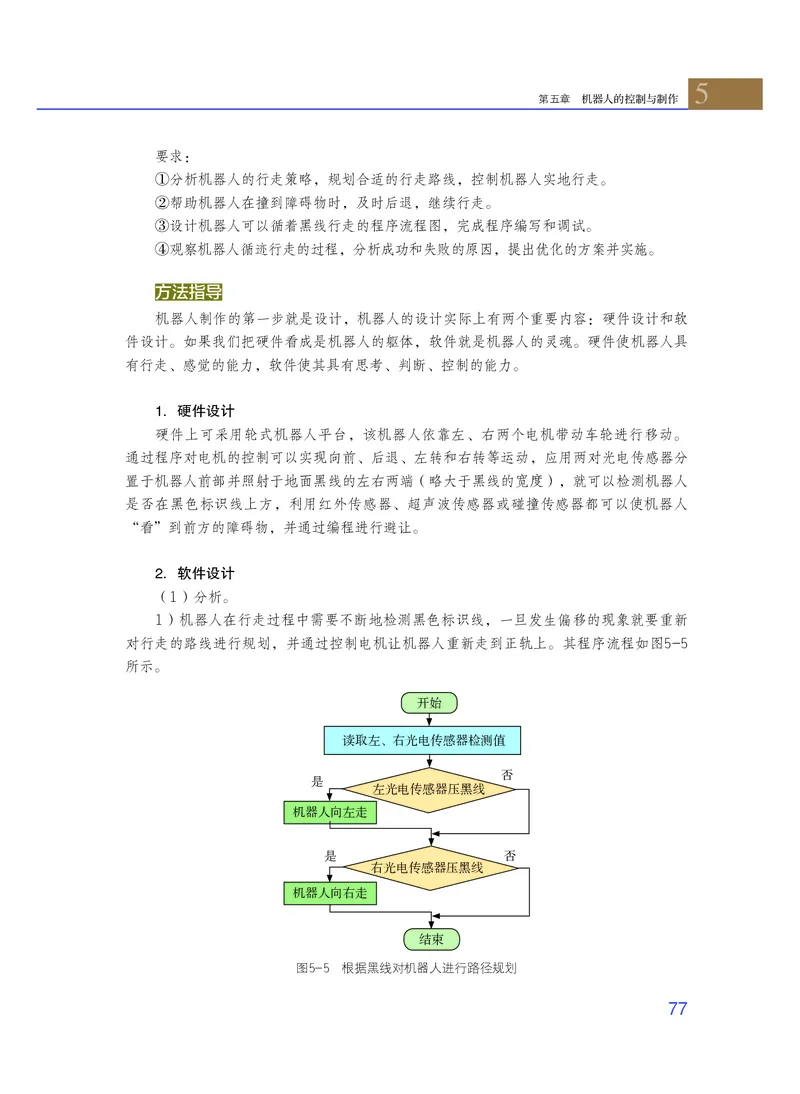
2.软件设计
(1)分析。
1)机器人在行走过程中需要不断地检测黑色标识线,一旦发生偏移的现象就要重新
对行走的路线进行规划,并通过控制电机让机器人重新走到正轨上。其程序流程如图5-5
所示。
开始
读取左、右光电传感器检测值
否
是
左光电传感器压黑线
机器人向左走
是 否
右光电传感器压黑线
机器人向右走
结束
图5-5 根据黑线对机器人进行路径规划
077通用技术 选择性必修2 机器人设计与制作
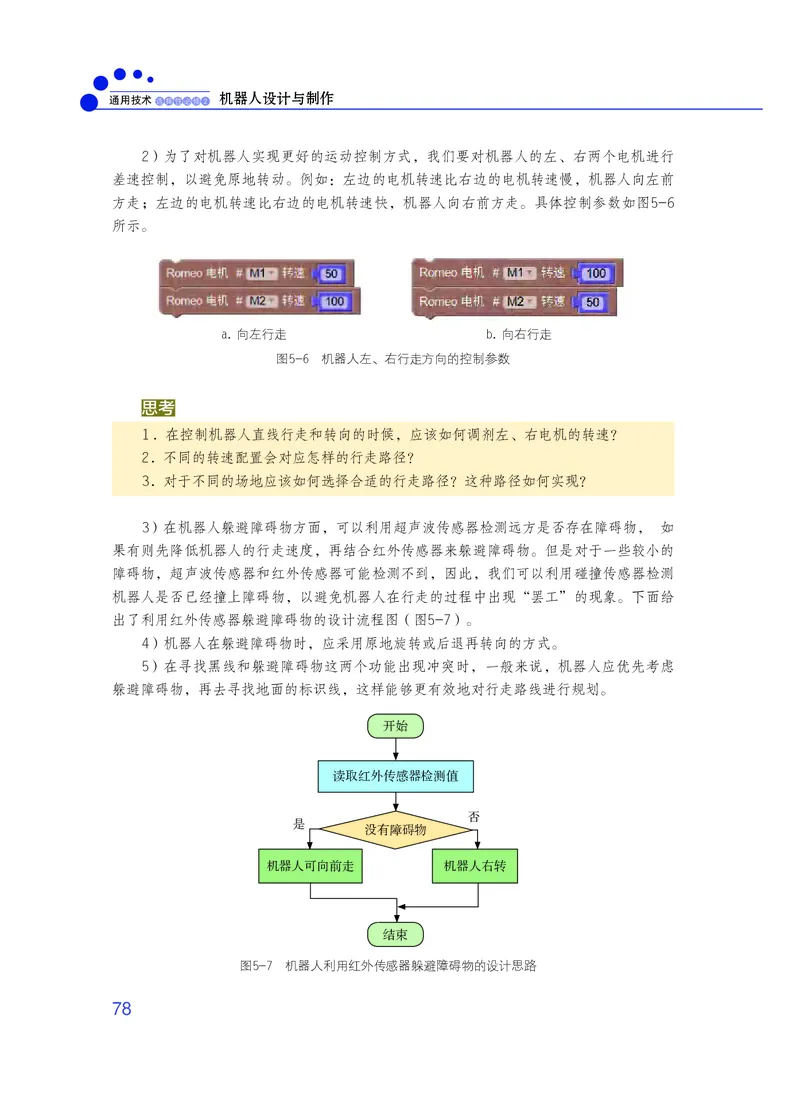
2)为了对机器人实现更好的运动控制方式,我们要对机器人的左、右两个电机进行
差速控制,以避免原地转动。例如:左边的电机转速比右边的电机转速慢,机器人向左前
方走;左边的电机转速比右边的电机转速快,机器人向右前方走。具体控制参数如图5-6
所示。
a. 向左行走 b. 向右行走
图5-6 机器人左、右行走方向的控制参数
思考
1.在控制机器人直线行走和转向的时候,应该如何调剂左、右电机的转速?
2.不同的转速配置会对应怎样的行走路径?
3.对于不同的场地应该如何选择合适的行走路径?这种路径如何实现?
3)在机器人躲避障碍物方面,可以利用超声波传感器检测远方是否存在障碍物, 如
果有则先降低机器人的行走速度,再结合红外传感器来躲避障碍物。但是对于一些较小的
障碍物,超声波传感器和红外传感器可能检测不到,因此,我们可以利用碰撞传感器检测
机器人是否已经撞上障碍物,以避免机器人在行走的过程中出现“罢工”的现象。下面给
出了利用红外传感器躲避障碍物的设计流程图(图5-7)。
4)机器人在躲避障碍物时,应采用原地旋转或后退再转向的方式。
5)在寻找黑线和躲避障碍物这两个功能出现冲突时,一般来说,机器人应优先考虑
躲避障碍物,再去寻找地面的标识线,这样能够更有效地对行走路线进行规划。
开始
读取红外传感器检测值
否
是
没有障碍物
机器人可向前走 机器人右转
结束
图5-7 机器人利用红外传感器躲避障碍物的设计思路
0785
第五章 机器人的控制与制作
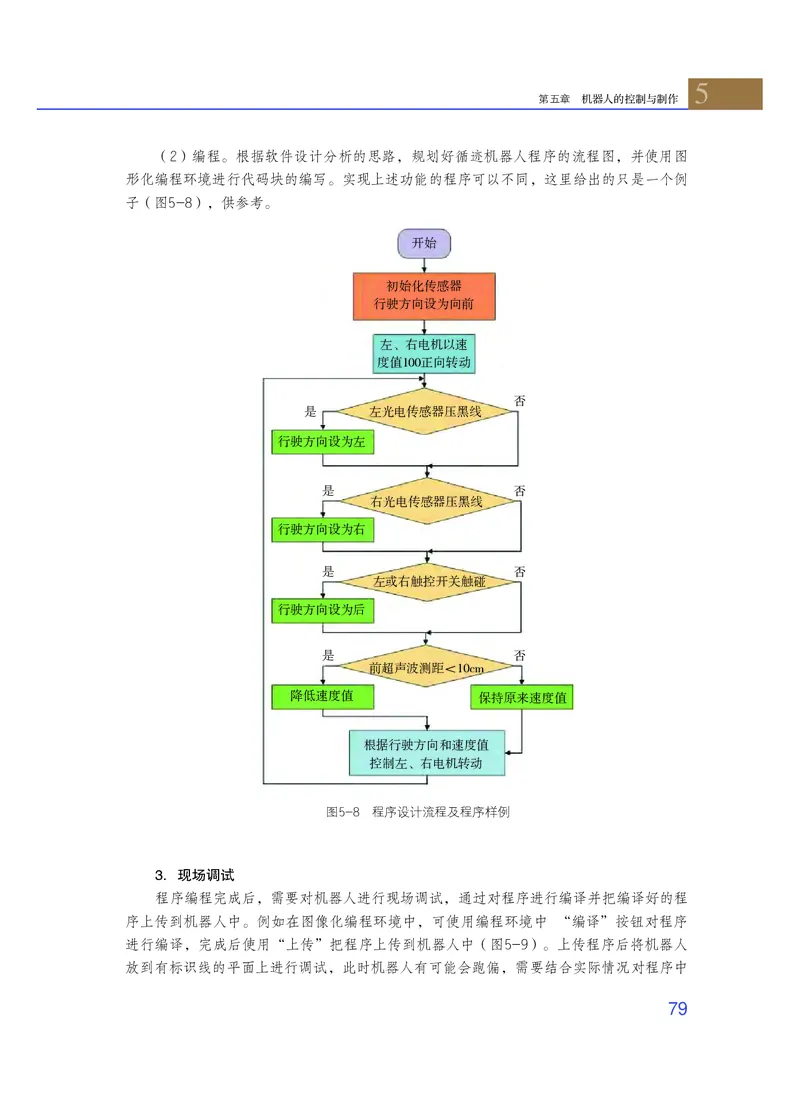
(2)编程。根据软件设计分析的思路,规划好循迹机器人程序的流程图,并使用图
形化编程环境进行代码块的编写。实现上述功能的程序可以不同,这里给出的只是一个例
子(图5-8),供参考。
开始
初始化传感器
行驶方向设为向前
左、右电机以速
度值100正向转动
否
是 左光电传感器压黑线
行驶方向设为左
是 否
右光电传感器压黑线
行驶方向设为右
是 否
左或右触控开关触碰
行驶方向设为后
是 否
前超声波测距<10cm
降低速度值 保持原来速度值
根据行驶方向和速度值
控制左、右电机转动
图5-8 程序设计流程及程序样例
3.现场调试
程序编程完成后,需要对机器人进行现场调试,通过对程序进行编译并把编译好的程
序上传到机器人中。例如在图像化编程环境中,可使用编程环境中 “编译”按钮对程序
进行编译,完成后使用“上传”把程序上传到机器人中(图5-9)。上传程序后将机器人
放到有标识线的平面上进行调试,此时机器人有可能会跑偏,需要结合实际情况对程序中
079通用技术 选择性必修2 机器人设计与制作
的速度值Speed、转向速度差值DeltaSpeed和光电传感器测量回来的数值、判断黑色的阈
值进行修改,重复多次编译上传程序的调试步骤,最终完成实现循迹机器人的设计要求。
图5-9 程序编译与上传
探究
结合所开展的实践活动讨论下列问题。
1.教室里有许多桌子、椅子和同学。机器人要避开这些障碍物,才可以顺利地沿着
黑线行走。请分析机器人需要什么传感器来避开障碍物?对教室的环境有什么要求?
2.机器人利用什么传感器来找到黑色标识线?怎样才能使机器人沿着黑线走, 并且不
会偏离?
3.探讨机器人“看东西”的能力,对于机器人不能“看”到的东西可以采用什么方
法避开?
4.机器人在实际行走的过程中,可能会有什么现象发生?应怎样避免?
5.在程序中,用不同的传感器进行检测的优先顺序是什么?调整这些顺序,将出现
怎样的情况?
二、自动返回机器人的制作
我们通过设计制作一个能“自动返回”的机器人,学习如何使机器人拥有“智慧”,
懂得“判断”外界环境,并能进行“记忆”和“思考”。
实践
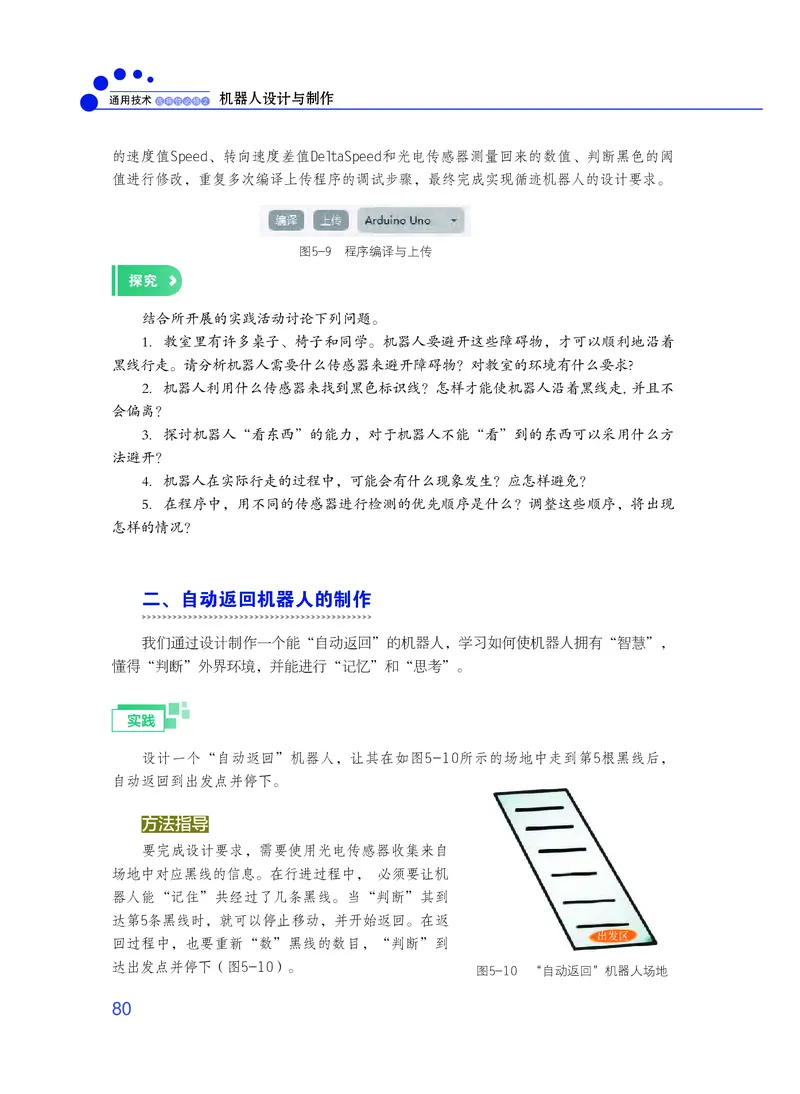
设计一个“自动返回”机器人,让其在如图5-10所示的场地中走到第5根黑线后,
自动返回到出发点并停下。
方法指导
要完成设计要求,需要使用光电传感器收集来自
场地中对应黑线的信息。在行进过程中, 必须要让机
器人能“记住”共经过了几条黑线。当“判断”其到
达第5条黑线时,就可以停止移动,并开始返回。在返
出发区
回过程中,也要重新“数”黑线的数目,“判断”到
达出发点并停下(图5-10)。
图5-10 “自动返回”机器人场地
0805
第五章 机器人的控制与制作
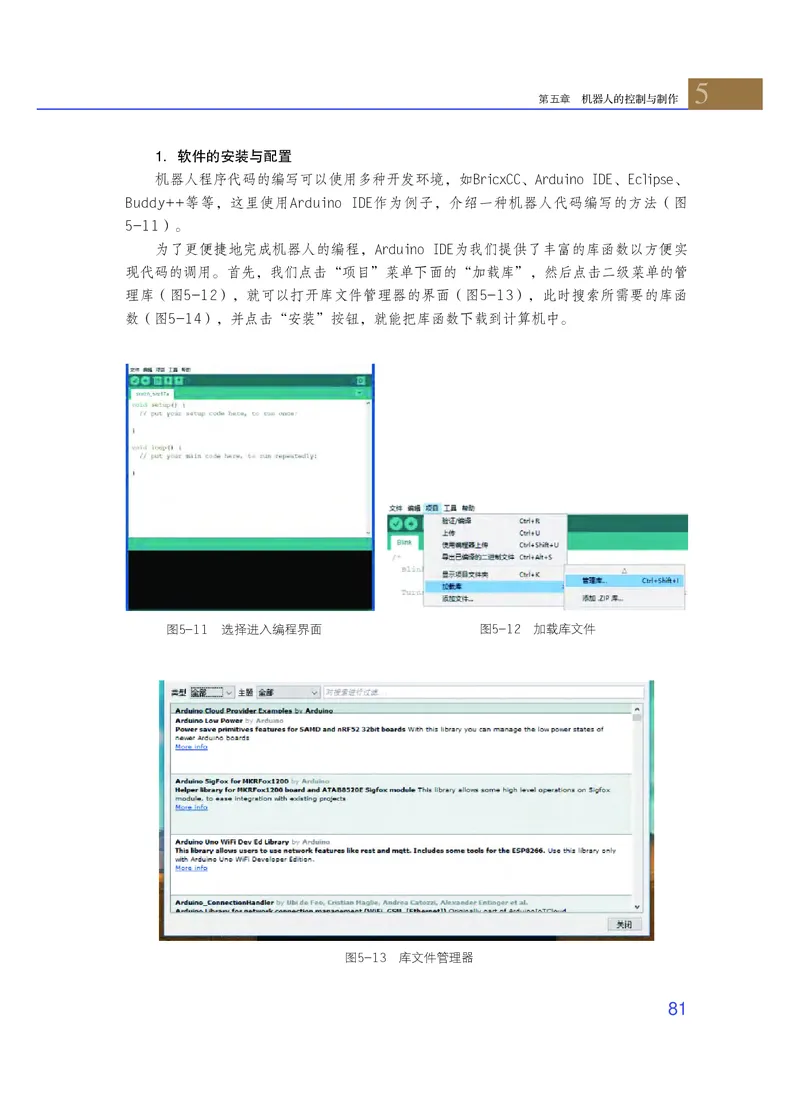
1.软件的安装与配置
机器人程序代码的编写可以使用多种开发环境,如BricxCC、Arduino IDE、Eclipse、
Buddy++等等,这里使用Arduino IDE作为例子,介绍一种机器人代码编写的方法(图
5-11)。
为了更便捷地完成机器人的编程,Arduino IDE为我们提供了丰富的库函数以方便实
现代码的调用。首先,我们点击“项目”菜单下面的“加载库”,然后点击二级菜单的管
理库(图5-12),就可以打开库文件管理器的界面(图5-13),此时搜索所需要的库函
数(图5-14),并点击“安装”按钮,就能把库函数下载到计算机中。
图5-11 选择进入编程界面 图5-12 加载库文件
图5-13 库文件管理器
081通用技术 选择性必修2 机器人设计与制作
图5-14 搜索所需库文件
当库函数下载完成后,可以关闭库文件管理器,然后依次点击“文件”下面的“示
例”,在下拉菜单中找到已经下载库函数示例文件(图5-15)。
点击打开库函数示例文件,可以浏览到与之对应的示范程序,这个将是我们编写程序
的基础模板(图5-16)。
图5-15 加载库文件 图5-16 示范程序
2.传感器的选取
为了达到设计的要求,“自动返回”机器人需要控制两种关键部件:光电传感器和电机。
我们之前已经学习过怎样使用光电传感器,在本设计过程中,同学们需要利用光电传感器收集
0825
第五章 机器人的控制与制作
来自地面的信息(图5-17)。
3.程序编写
出发与返回两个过程主要是通过两个
电机的正向转动和反向转动来实现,配合
光电传感器检测到的地面信息,以计数的
方式统计通过黑色线的数目。根据设计思
路,我们可以确定程序对应的流程图(图
5-18)。
打开Arduino IDE,选择菜单“文件”
图5-17 利用光电传感器收集地面信息
下面的“新建”(图5-19)。
开始
A、B电机正向转动
否
是否通过黑线
是
黑线计数值加1
否
是否经过第5条黑线
是
A、B电机停止
A、B电机反向转动
否
是否通过黑线
是
黑线计数值减1
否
是否经过第1条黑线
是
结束
图5-18 程序流程 图5-19 创建文档
083通用技术 选择性必修2 机器人设计与制作
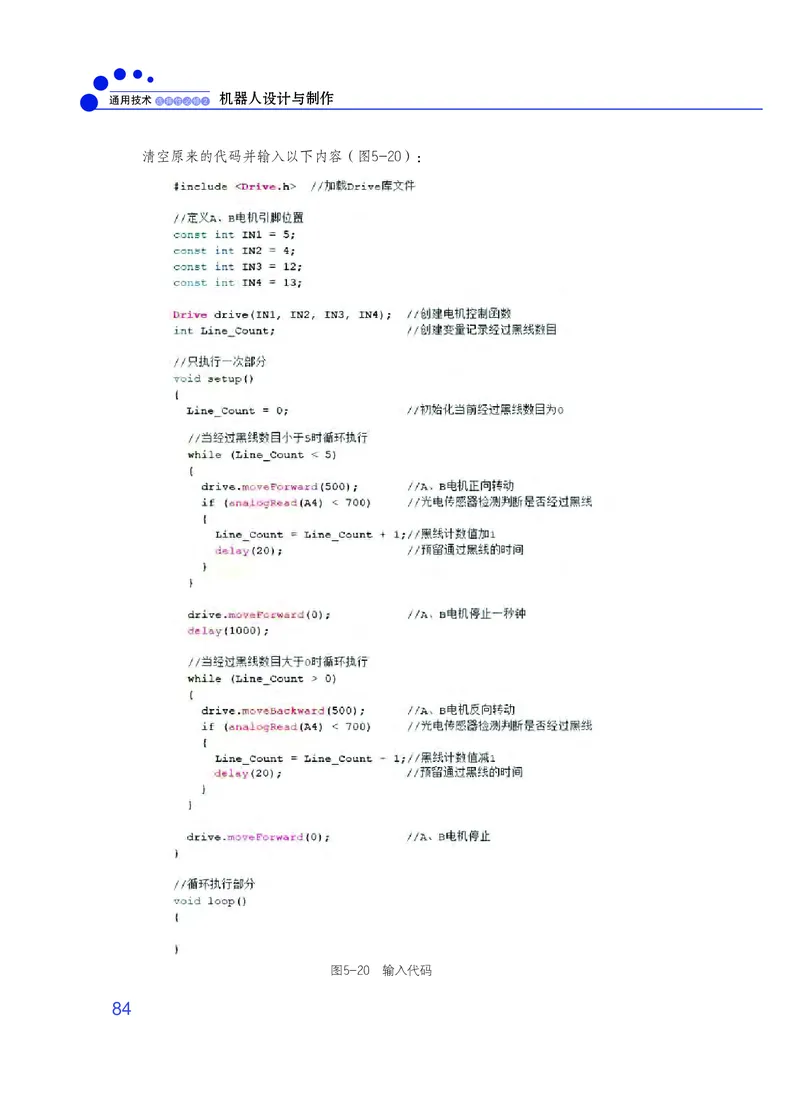
清空原来的代码并输入以下内容(图5-20):
图5-20 输入代码
0845
第五章 机器人的控制与制作
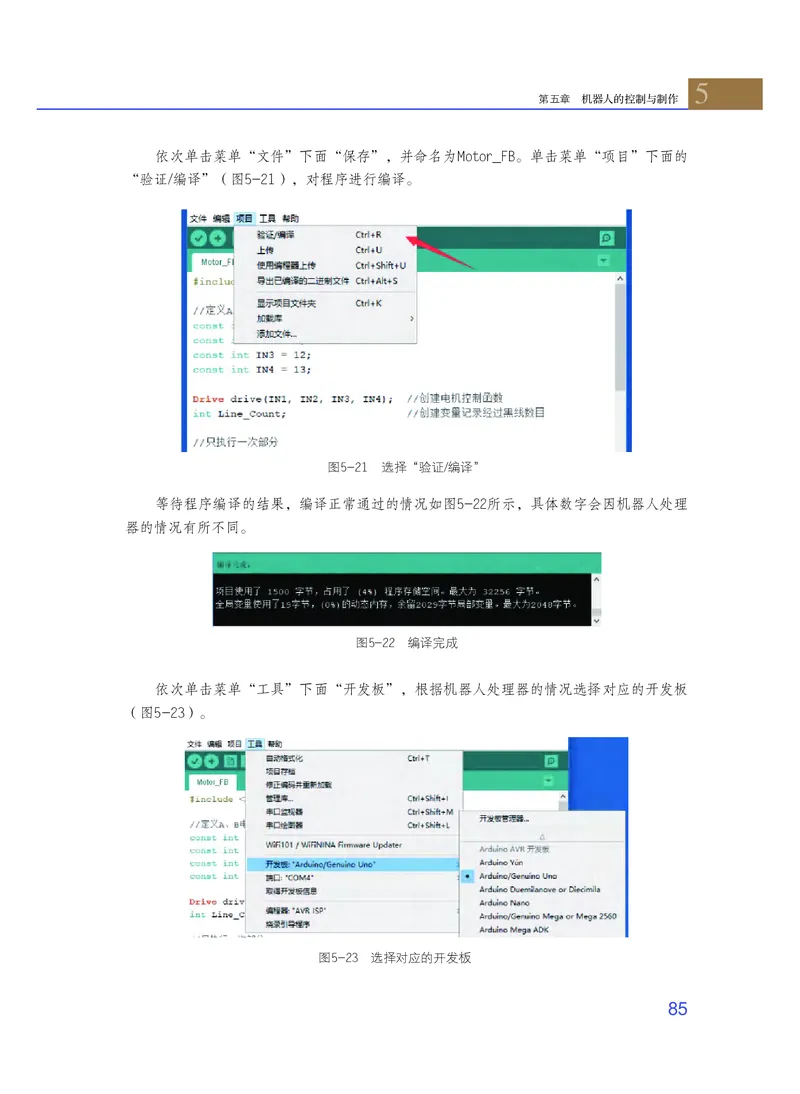
依次单击菜单“文件”下面“保存”,并命名为Motor_FB。单击菜单“项目”下面的
“验证/编译”(图5-21),对程序进行编译。
图5-21 选择“验证/编译”
等待程序编译的结果,编译正常通过的情况如图5-22所示,具体数字会因机器人处理
器的情况有所不同。
图5-22 编译完成
依次单击菜单“工具”下面“开发板”,根据机器人处理器的情况选择对应的开发板
(图5-23)。
图5-23 选择对应的开发板
085通用技术 选择性必修2 机器人设计与制作
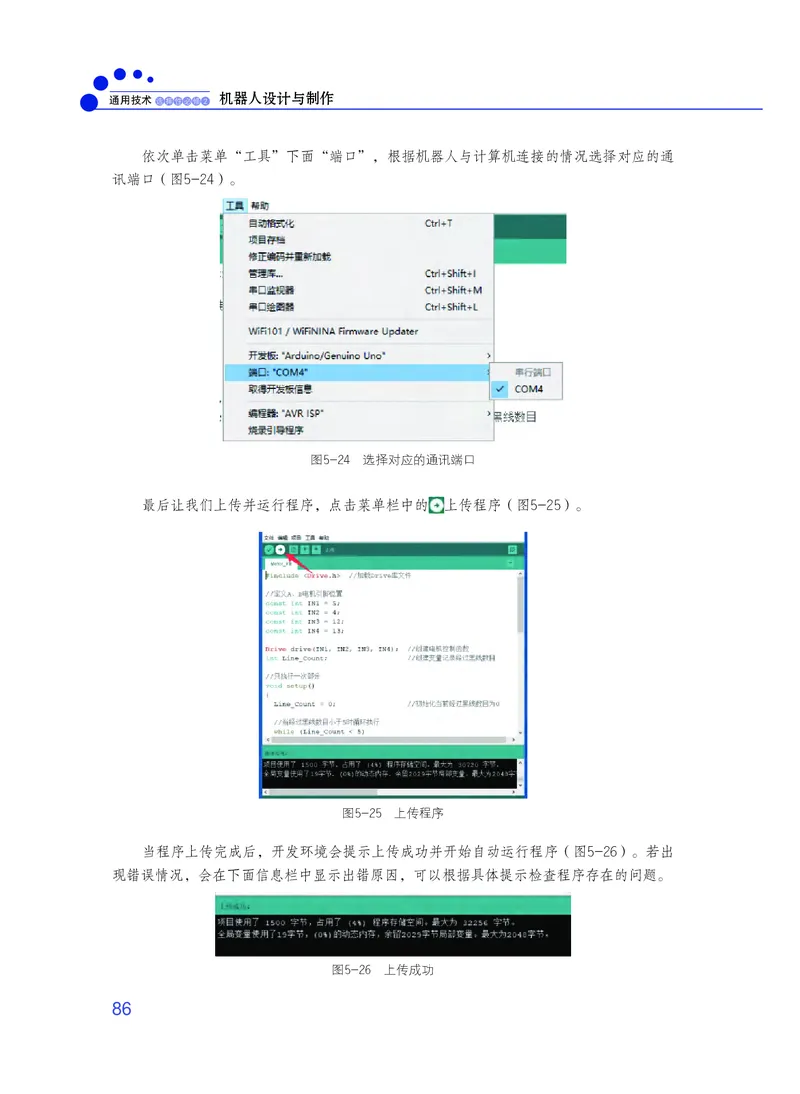
依次单击菜单“工具”下面“端口”,根据机器人与计算机连接的情况选择对应的通
讯端口(图5-24)。
图5-24 选择对应的通讯端口
最后让我们上传并运行程序,点击菜单栏中的 上传程序(图5-25)。
图5-25 上传程序
当程序上传完成后,开发环境会提示上传成功并开始自动运行程序(图5-26)。若出
现错误情况,会在下面信息栏中显示出错原因,可以根据具体提示检查程序存在的问题。
图5-26 上传成功
0865
第五章 机器人的控制与制作
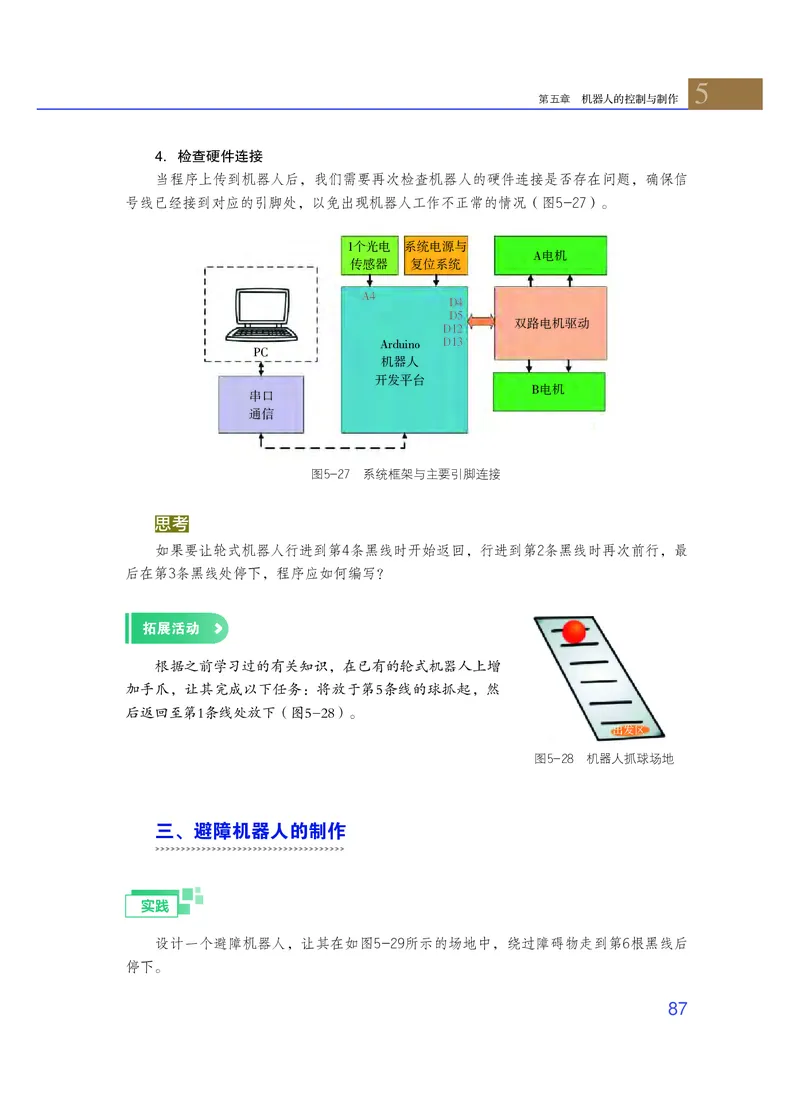
4.检查硬件连接
当程序上传到机器人后,我们需要再次检查机器人的硬件连接是否存在问题,确保信
号线已经接到对应的引脚处,以免出现机器人工作不正常的情况(图5-27)。
1个光电 系统电源与
A电机
传感器 复位系统
A4
D4
D5
双路电机驱动
D12
Arduino D13
PC
机器人
开发平台
B电机
串口
通信
图5-27 系统框架与主要引脚连接
思考
如果要让轮式机器人行进到第4条黑线时开始返回,行进到第2条黑线时再次前行,最
后在第3条黑线处停下,程序应如何编写?
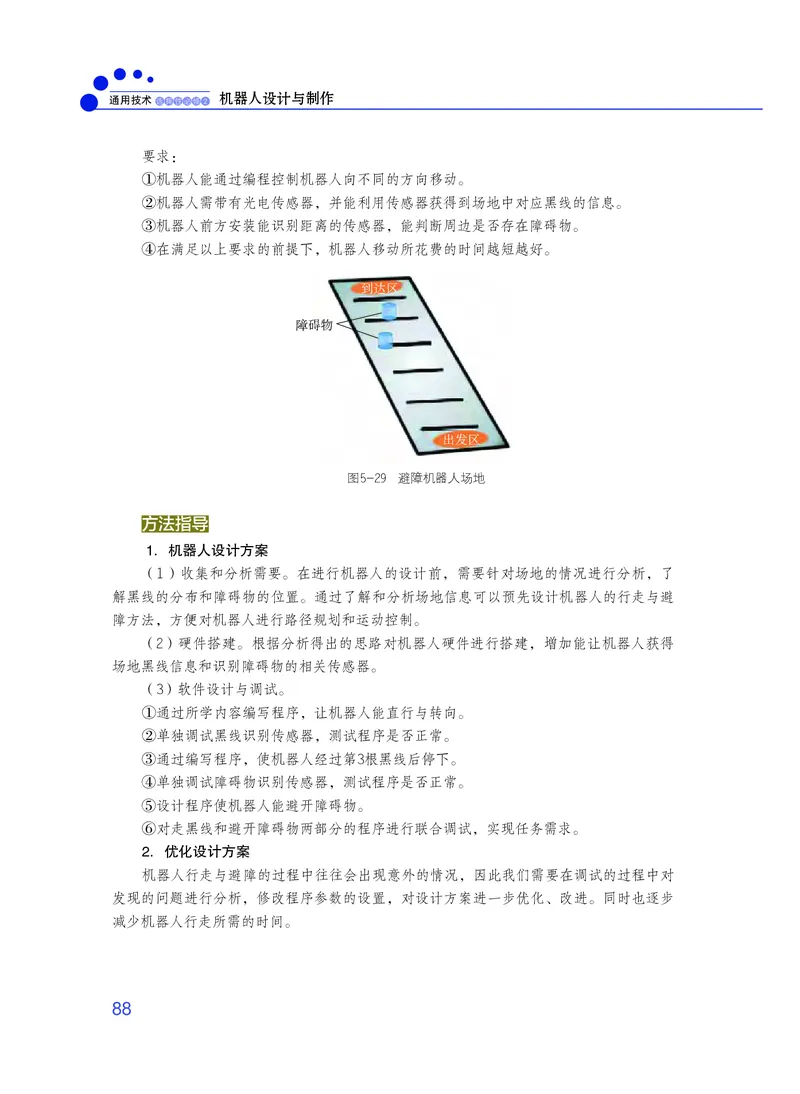
拓展活动
根据之前学习过的有关知识,在已有的轮式机器人上增
加手爪,让其完成以下任务:将放于第5条线的球抓起,然
后返回至第1条线处放下(图5-28)。
出发区
图5-28 机器人抓球场地
三、避障机器人的制作
实践
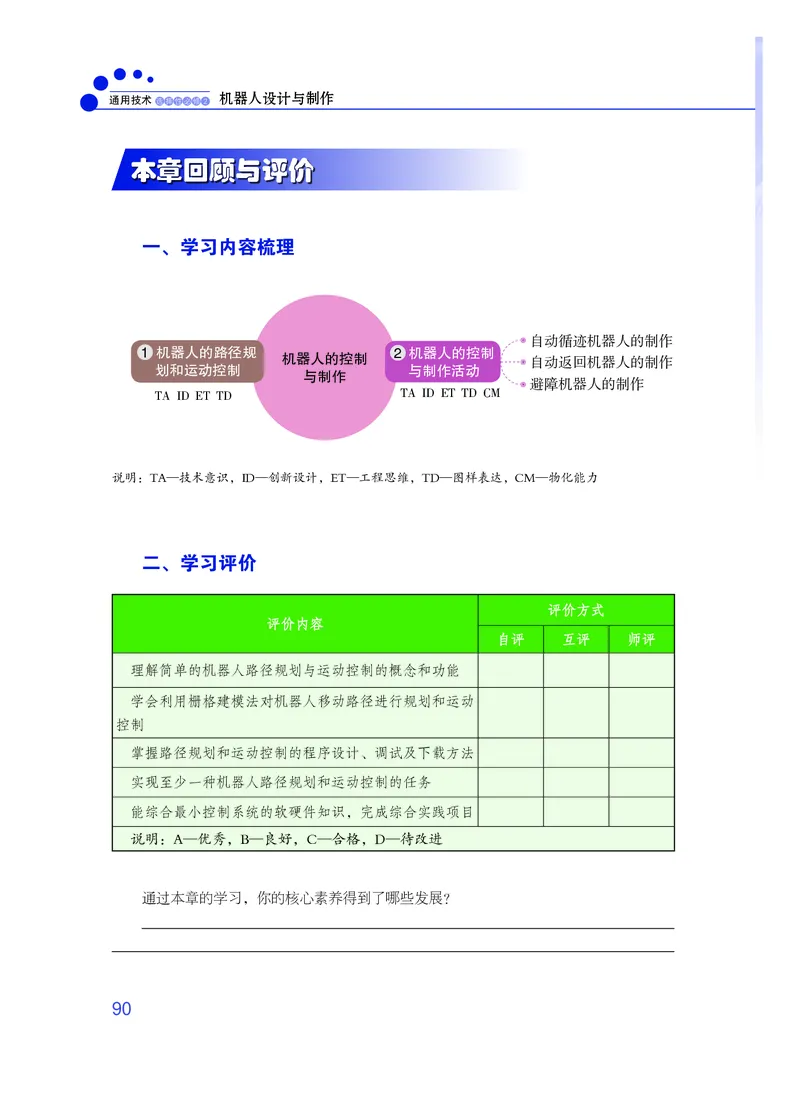
设计一个避障机器人,让其在如图5-29所示的场地中,绕过障碍物走到第6根黑线后
停下。
087通用技术 选择性必修2 机器人设计与制作
要求:
①机器人能通过编程控制机器人向不同的方向移动。
②机器人需带有光电传感器,并能利用传感器获得到场地中对应黑线的信息。
③机器人前方安装能识别距离的传感器,能判断周边是否存在障碍物。
④在满足以上要求的前提下,机器人移动所花费的时间越短越好。
到达区
障碍物
出发区
图5-29 避障机器人场地
方法指导
1.机器人设计方案
(1)收集和分析需要。在进行机器人的设计前,需要针对场地的情况进行分析,了
解黑线的分布和障碍物的位置。通过了解和分析场地信息可以预先设计机器人的行走与避
障方法,方便对机器人进行路径规划和运动控制。
(2)硬件搭建。根据分析得出的思路对机器人硬件进行搭建,增加能让机器人获得
场地黑线信息和识别障碍物的相关传感器。
(3)软件设计与调试。
①通过所学内容编写程序,让机器人能直行与转向。
②单独调试黑线识别传感器,测试程序是否正常。
③通过编写程序,使机器人经过第3根黑线后停下。
④单独调试障碍物识别传感器,测试程序是否正常。
⑤设计程序使机器人能避开障碍物。
⑥对走黑线和避开障碍物两部分的程序进行联合调试,实现任务需求。
2.优化设计方案
机器人行走与避障的过程中往往会出现意外的情况,因此我们需要在调试的过程中对
发现的问题进行分析,修改程序参数的设置,对设计方案进一步优化、改进。同时也逐步
减少机器人行走所需的时间。
0885
第五章 机器人的控制与制作
综合学习活动
选取下列1~2个机器人项目进行制作,并写出设计报告。
(1)自动避障并返回的机器人。
(2)围绕障碍物行走的机器人。
(3)跟随前方物体行走的机器人。
(4)沿着墙壁行走的机器人。
089通用技术 选择性必修2 机器人设计与制作
本章回顾与评价
一、学习内容梳理
自动循迹机器人的制作
1 机器人的路径规 2 机器人的控制
机器人的控制
自动返回机器人的制作
划和运动控制 与制作活动
与制作
避障机器人的制作
TA ID ET TD TA ID ET TD CM
说明:TA—技术意识,ID—创新设计,ET—工程思维,TD—图样表达,CM—物化能力
二、学习评价
评价方式
评价内容
自评 互评 师评
理解简单的机器人路径规划与运动控制的概念和功能
学会利用栅格建模法对机器人移动路径进行规划和运动
控制
掌握路径规划和运动控制的程序设计、调试及下载方法
实现至少一种机器人路径规划和运动控制的任务
能综合最小控制系统的软硬件知识,完成综合实践项目
说明:A—优秀,B—良好,C—合格,D—待改进
通过本章的学习,你的核心素养得到了哪些发展?
090后 记
党的十九大明确提出:“要全面贯彻党的教育方针,落实立德树人根本任务,发展素
质教育,推进教育公平,培养德智体美全面发展的社会主义建设者和接班人。”
基础教育课程承载着党的教育方针和教育思想,规定了教育目标和教育内容,是国家
意志在教育领域的直接体现,在立德树人中发挥着关键作用。
有鉴于此,我们对本教材进行了全面修订,旨在进一步深化学生对人机关系的认识,
体验机器人技术对人类社会发展产生的深远影响,增强技术的综合运用及其思想方法的认
识与实践能力。
本教材由刘琼发主编,李榕、郑永驹、钟清华、张百睿、周嘉、龚泽祥、胡智豪等参
加编写工作。为让本书更符合凝练核心素养,推动落实“立德树人”的根本任务,在编写
后期,张百睿、叶智彬、欧阳菲菲等对本教材的统稿工作提供了极大的帮助。
在本教材的编写过程中,得到华南师范大学、佛山市荣山中学、深圳中学等学校的大
力支持,在此一并表示衷心的感谢!普
通
高
中
教
科
书
通
用
技
术
选
择
性
必
修
2
机
器
选择性必修2
人
设
计
与
制
作
广
东
教
育
出
版
社
广
东
科
技 广东教育出版社
出
批准文号:粤发改价格〔2017〕434号 举报电话:12315 定价:7.36元 版 社 广东科技出版社

