文档内容
重庆八中 2024——2025 学年度(下)高三年级入学考试
物 理 试 题
命题:彭振中 郭林 吴翠松 审核:吴翠松 打印:郭林 校对:彭振中
一、选择题:本大题共10个小题,共43分。第1-7题只有一项符合题目要求,每题4分;第
8-10题有多项符合题目要求,每题5分,选对但不全的得3分,有选错的得0分。
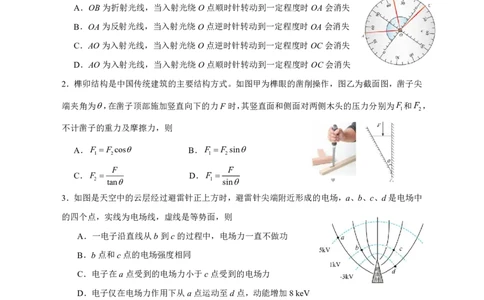
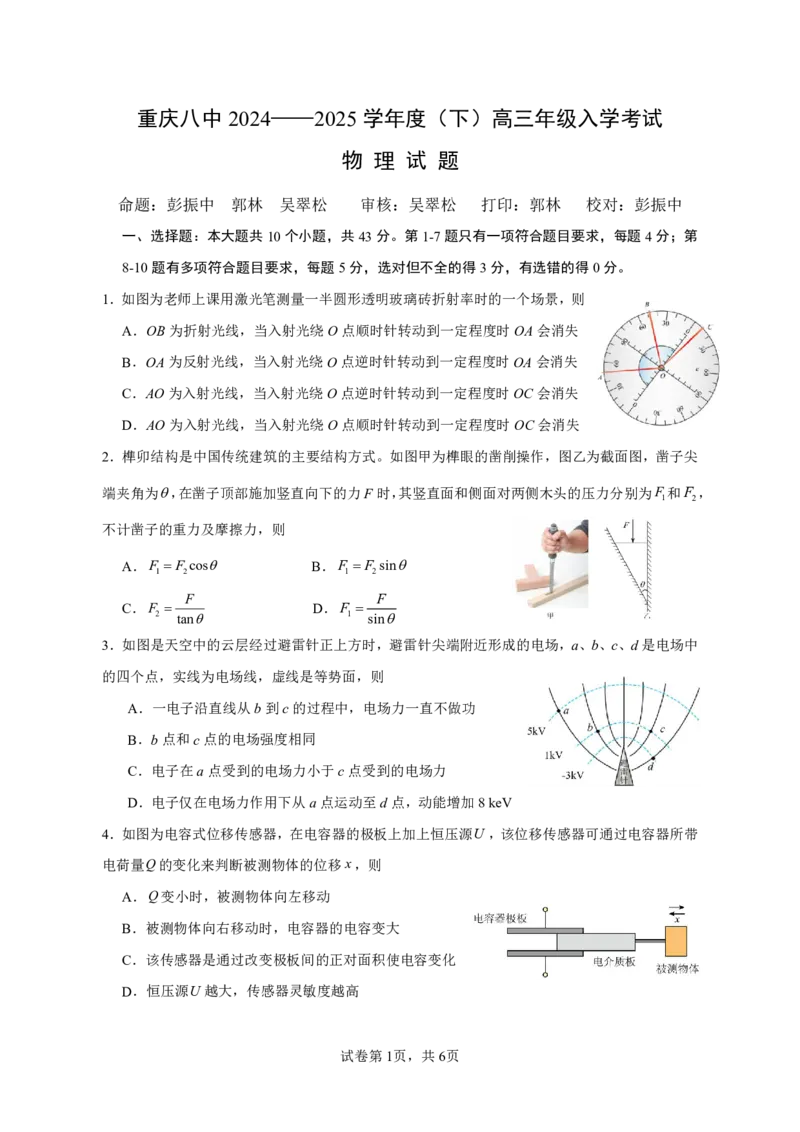
1.如图为老师上课用激光笔测量一半圆形透明玻璃砖折射率时的一个场景,则
A.OB为折射光线,当入射光绕O点顺时针转动到一定程度时OA会消失
B.OA为反射光线,当入射光绕O点逆时针转动到一定程度时OA会消失
C.AO为入射光线,当入射光绕O点逆时针转动到一定程度时OC会消失
D.AO为入射光线,当入射光绕O点顺时针转动到一定程度时OC会消失
2.榫卯结构是中国传统建筑的主要结构方式。如图甲为榫眼的凿削操作,图乙为截面图,凿子尖
端夹角为,在凿子顶部施加竖直向下的力F 时,其竖直面和侧面对两侧木头的压力分别为F 和F ,
1 2
不计凿子的重力及摩擦力,则
A.F F cos B.F F sin
1 2 1 2
F F
C.F D.F
2 tan 1 sin
3.如图是天空中的云层经过避雷针正上方时,避雷针尖端附近形成的电场,a、b、c、d是电场中
的四个点,实线为电场线,虚线是等势面,则
A.一电子沿直线从b到c的过程中,电场力一直不做功
B.b点和c点的电场强度相同
C.电子在a点受到的电场力小于c点受到的电场力
D.电子仅在电场力作用下从a点运动至d点,动能增加8keV
4.如图为电容式位移传感器,在电容器的极板上加上恒压源U ,该位移传感器可通过电容器所带
电荷量Q的变化来判断被测物体的位移x,则
A.Q变小时,被测物体向左移动
B.被测物体向右移动时,电容器的电容变大
C.该传感器是通过改变极板间的正对面积使电容变化
D.恒压源U 越大,传感器灵敏度越高
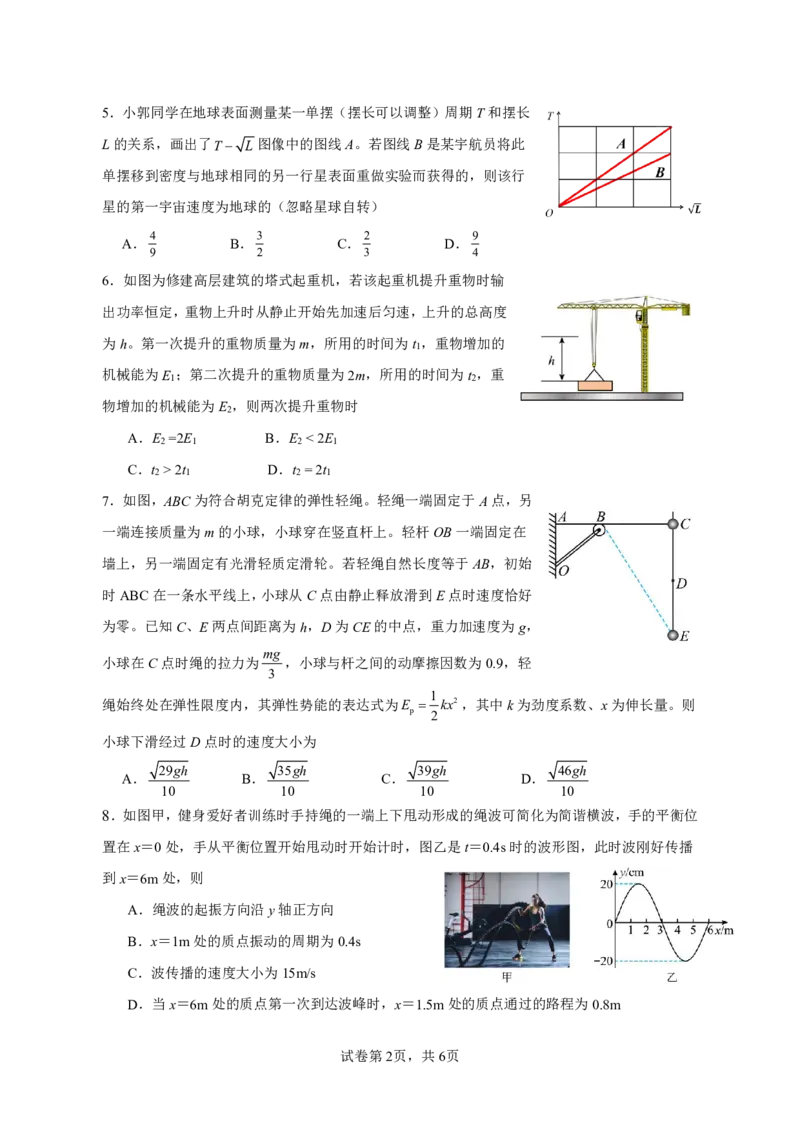
试卷第1页,共6页5.小郭同学在地球表面测量某一单摆(摆长可以调整)周期T和摆长
L的关系,画出了T L 图像中的图线A。若图线B是某宇航员将此
单摆移到密度与地球相同的另一行星表面重做实验而获得的,则该行
星的第一宇宙速度为地球的(忽略星球自转)
4 3 2 9
A. B. C. D.
9 2 3 4
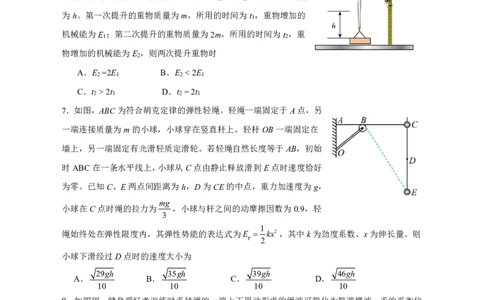
6.如图为修建高层建筑的塔式起重机,若该起重机提升重物时输
出功率恒定,重物上升时从静止开始先加速后匀速,上升的总高度
为h。第一次提升的重物质量为m,所用的时间为t ,重物增加的
1
机械能为E ;第二次提升的重物质量为2m,所用的时间为t ,重
1 2
物增加的机械能为E ,则两次提升重物时
2
A.E =2E B.E <2E
2 1 2 1
C.t >2t D.t =2t
2 1 2 1
7.如图,ABC为符合胡克定律的弹性轻绳。轻绳一端固定于A点,另
一端连接质量为m的小球,小球穿在竖直杆上。轻杆OB一端固定在
墙上,另一端固定有光滑轻质定滑轮。若轻绳自然长度等于AB,初始
时ABC在一条水平线上,小球从C点由静止释放滑到E点时速度恰好
为零。已知C、E两点间距离为h,D为CE的中点,重力加速度为g,
mg
小球在C点时绳的拉力为 ,小球与杆之间的动摩擦因数为0.9,轻
3
1
绳始终处在弹性限度内,其弹性势能的表达式为E kx2,其中k为劲度系数、x为伸长量。则
p 2
小球下滑经过D点时的速度大小为
29gh 35gh 39gh 46gh
A. B. C. D.
10 10 10 10
8.如图甲,健身爱好者训练时手持绳的一端上下甩动形成的绳波可简化为简谐横波,手的平衡位
置在x=0处,手从平衡位置开始甩动时开始计时,图乙是t=0.4s时的波形图,此时波刚好传播
到x=6m处,则
A.绳波的起振方向沿y轴正方向
B.x=1m处的质点振动的周期为0.4s
C.波传播的速度大小为15m/s
D.当x=6m处的质点第一次到达波峰时,x=1.5m处的质点通过的路程为0.8m
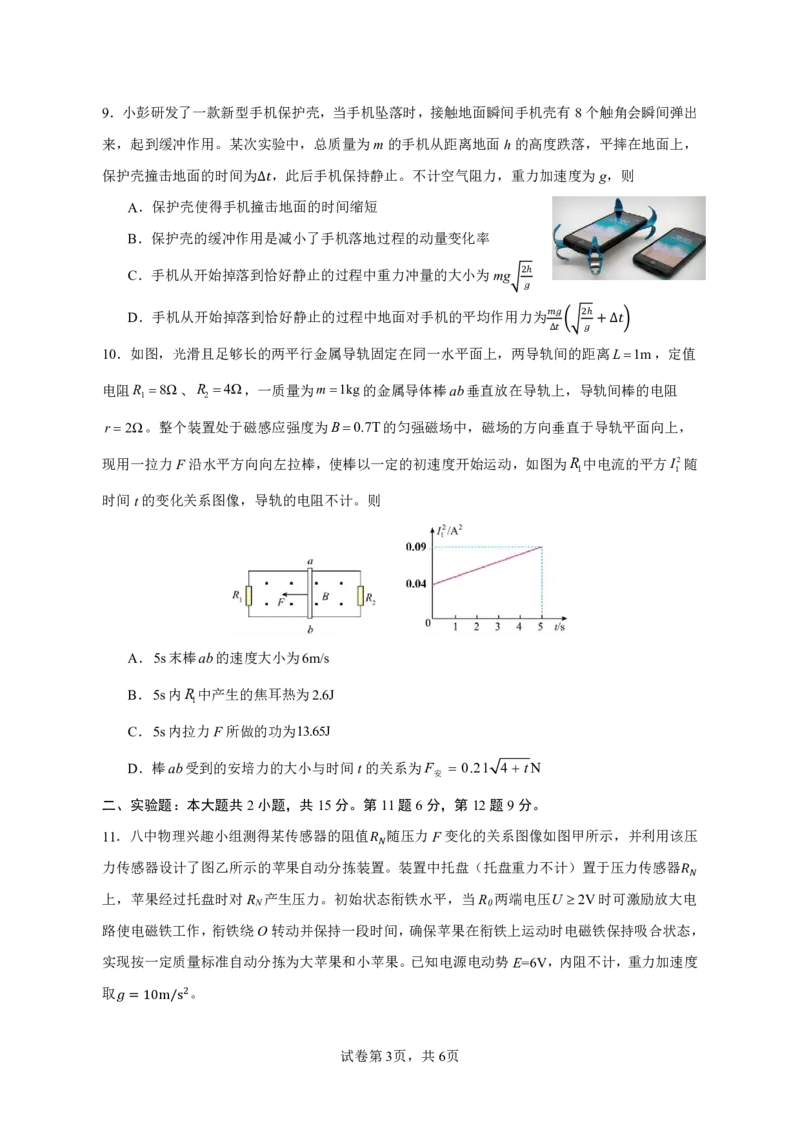
试卷第2页,共6页9.小彭研发了一款新型手机保护壳,当手机坠落时,接触地面瞬间手机壳有8个触角会瞬间弹出
来,起到缓冲作用。某次实验中,总质量为m的手机从距离地面h的高度跌落,平摔在地面上,
保护壳撞击地面的时间为 ,此后手机保持静止。不计空气阻力,重力加速度为g,则
A.保护壳使得手机撞∆击 地面的时间缩短
B.保护壳的缓冲作用是减小了手机落地过程的动量变化率
C.手机从开始掉落到恰好静止的过程中重力冲量的大小为mg
2ℎ
D.手机从开始掉落到恰好静止的过程中地面对手机的平均作用力为
2ℎ
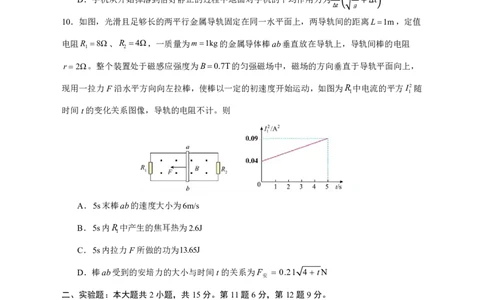
10.如图,光滑且足够长的两平行金属导轨固定在同一水平面上,两导轨∆间 的距 +离∆ L 1m,定值
电阻R 8Ω、R 4Ω,一质量为m1kg的金属导体棒ab垂直放在导轨上,导轨间棒的电阻
1 2
r 2Ω。整个装置处于磁感应强度为B0.7T的匀强磁场中,磁场的方向垂直于导轨平面向上,
现用一拉力F沿水平方向向左拉棒,使棒以一定的初速度开始运动,如图为R中电流的平方I2随
1 1
时间t的变化关系图像,导轨的电阻不计。则
A.5s末棒ab的速度大小为6m/s
B.5s内R中产生的焦耳热为2.6J
1
C.5s内拉力F所做的功为13.65J
D.棒ab受到的安培力的大小与时间t的关系为F 0.21 4tN
安
二、实验题:本大题共2小题,共15分。第11题6分,第12题9分。
11.八中物理兴趣小组测得某传感器的阻值 随压力F变化的关系图像如图甲所示,并利用该压
力传感器设计了图乙所示的苹果自动分拣装 置 。装置中托盘(托盘重力不计)置于压力传感器
上,苹果经过托盘时对R 产生压力。初始状态衔铁水平,当R 两端电压U 2V时可激励放大 电
N 0
路使电磁铁工作,衔铁绕O转动并保持一段时间,确保苹果在衔铁上运动时电磁铁保持吸合状态,
实现按一定质量标准自动分拣为大苹果和小苹果。已知电源电动势E=6V,内阻不计,重力加速度
取 。
2
=10m/s
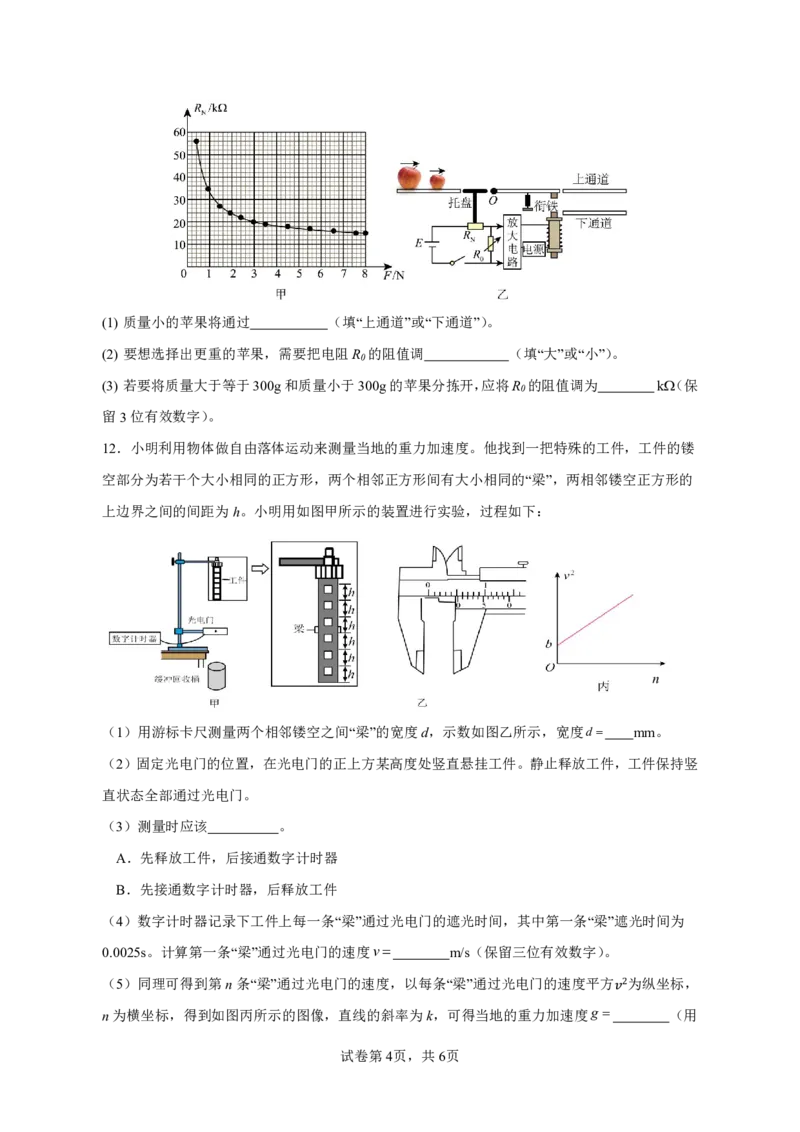
试卷第3页,共6页(1) 质量小的苹果将通过 (填“上通道”或“下通道”)。
(2) 要想选择出更重的苹果,需要把电阻R 的阻值调 (填“大”或“小”)。
0
(3) 若要将质量大于等于300g和质量小于300g的苹果分拣开,应将R 的阻值调为 k(保
0
留3位有效数字)。
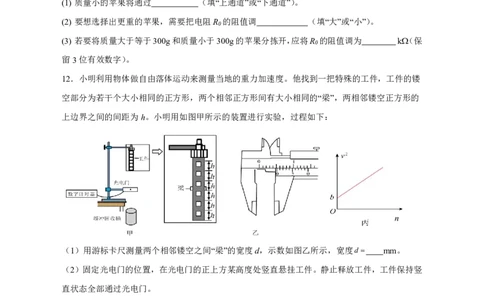
12.小明利用物体做自由落体运动来测量当地的重力加速度。他找到一把特殊的工件,工件的镂
空部分为若干个大小相同的正方形,两个相邻正方形间有大小相同的“梁”,两相邻镂空正方形的
上边界之间的间距为h。小明用如图甲所示的装置进行实验,过程如下:
n
(1)用游标卡尺测量两个相邻镂空之间“梁”的宽度d,示数如图乙所示,宽度d mm。
(2)固定光电门的位置,在光电门的正上方某高度处竖直悬挂工件。静止释放工件,工件保持竖
直状态全部通过光电门。
(3)测量时应该 。
A.先释放工件,后接通数字计时器
B.先接通数字计时器,后释放工件
(4)数字计时器记录下工件上每一条“梁”通过光电门的遮光时间,其中第一条“梁”遮光时间为
0.0025s。计算第一条“梁”通过光电门的速度v m/s(保留三位有效数字)。
(5)同理可得到第n条“梁”通过光电门的速度,以每条“梁”通过光电门的速度平方 为纵坐标,
2
n为横坐标,得到如图丙所示的图像,直线的斜率为k,可得当地的重力加速度g (用
试卷第4页,共6页题中给出的字母表示)。
三、计算题:本大题共3小题,共42分。13题10分,14题14分,15题18分。解答应写出必
要的文字说明、方程式和重要的演算步骤,只写出最后结果的不能得分。
13.“疆电入渝”特高压工程将于2025年底投运,可每年向重庆输送电量超360亿千瓦时。若发
电站依次通过原副线圈匝数比分别为 、( )的两理想变压器将电能输送给用户,升压变压
1
器的原线圈两端电压为 ,降压变压 器的 副 线 < 圈 1 两端电压为 ,两变压器之间的输电线的总电阻
为 ,求: 1 2
( 1)输电线损耗的电压 ;
(2)用户的电流 。 ∆
14.如图,质量为 、长为 的长木板静止在光滑的水平地面上,质量为 的智能机器人(忽略大
小)从长木板的左 端起跳, 恰好落在长木板的右端,重力加速度为 ,求3 :
(1)机器人从起跳到落在长木板过程中,机器人的位移大小;
(2)起跳过程机器人做功的最小值。
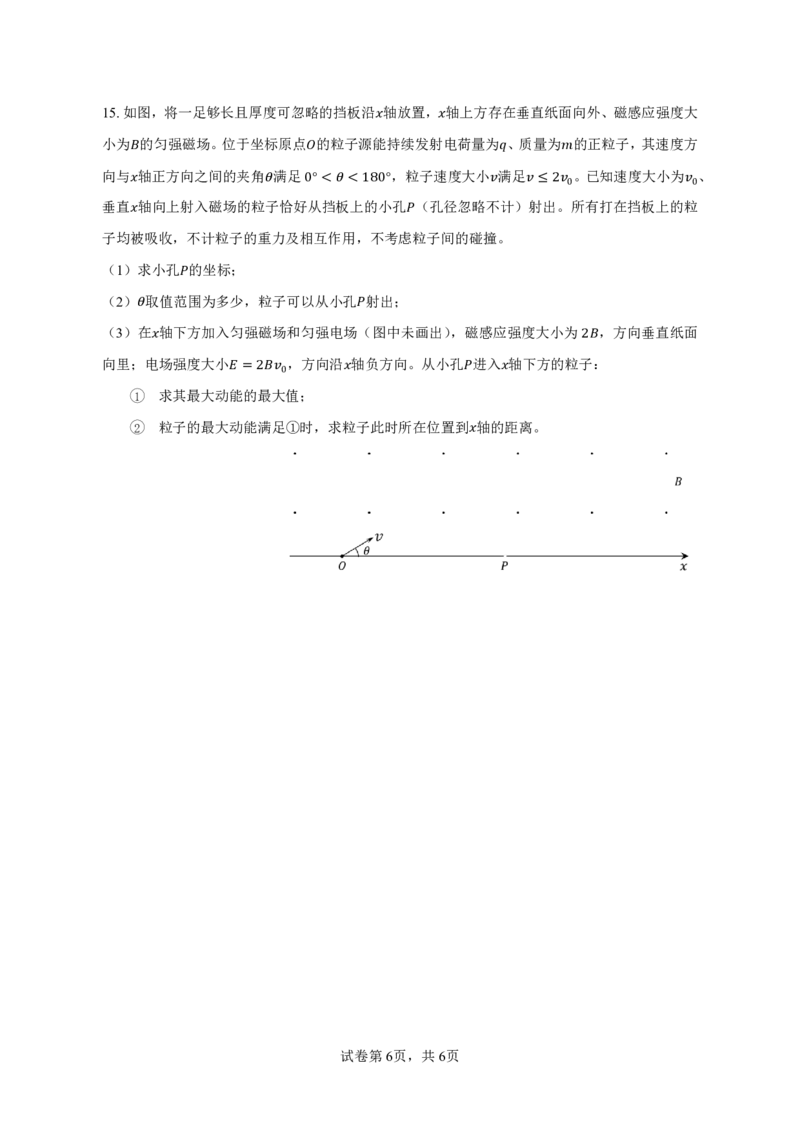
试卷第5页,共6页15.如图,将一足够长且厚度可忽略的挡板沿 轴放置, 轴上方存在垂直纸面向外、磁感应强度大
小为 的匀强磁场。位于坐标原点 的粒子源能 持续发射 电荷量为 、质量为 的正粒子,其速度方
向与 轴正方向之间的夹角 满足 ,粒子速度大小 满 足 。已知速度大小为 、
垂直 轴向上射入磁场的粒 子恰好0从°<挡板 <上1的80小°孔 (孔径忽略不 计) 射≤出2。 0所有打在挡板上的粒 0
子均被 吸收,不计粒子的重力及相互作用,不考虑 粒子间的碰撞。
(1)求小孔 的坐标;
(2) 取值范 围为多少,粒子可以从小孔 射出;
(3) 在 轴下方加入匀强磁场和匀强电场 (图中未画出),磁感应强度大小为 ,方向垂直纸面
向里;电 场强度大小 ,方向沿 轴负方向。从小孔 进入 轴下方的粒子2 :
1 求其最大动能 =的2最 大 0值;
2 粒子的最大动能满足①时,求粒子此时所在位置到 轴的距离。
试卷第6页,共6页

